
Abstract
We consider a wave equation with variable coefficients in time and space in a bounded domain \(\Omega \) which has the smooth boundary \(\Gamma =\Gamma _0\cup \Gamma _1\) such that \({\overline{\Gamma }}_0\cap {\overline{\Gamma }}_1\ne \emptyset \). We study this system that has a homogeneous Dirichlet boundary on \(\Gamma _0\) and a dynamic boundary on \(\Gamma _1\). The innovation of the paper lies in the coefficients which depends on the time variable and the singularities generated by changing the boundary conditions along the interface, thus we need some special techniques to deal with these difficulties. Under some geometric assumptions, the exponential decay result of the system is established by the Riemannian geometry method and the energy perturbation method.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Let \(\Omega \) be a bounded domain in \(R^n\) \((n\ge 2)\) which has a boundary \(\Gamma =\Gamma _0\cup \Gamma _1\) of class \(C^2\). Here meas(\(\Gamma _0\)) and meas(\(\Gamma _1\)) are positive and \(\Sigma ={\overline{\Gamma }}_0\cap {\overline{\Gamma }}_1\ne \emptyset \). Let \(\omega \) be an open neighborhood of the part \(\Gamma _1\) of the boundary that is supposed to be connected and meas\(({\overline{\omega }}\cap \Gamma _0)>0\) (see Fig. 1).

An example of domain \(\Omega \) satisfying the required geometrical assumptions for \(n=2\)
Here \(\nu =(\nu _1,\cdots ,\nu _n)\) represents the outward unit vector normal to \(\Gamma \). We denote the gradient and the divergence by \(\nabla \) and \({\textrm{div}}\) respectively, and the tangential-gradient and the tangential-divergence by \(\nabla _T\) and \({\textrm{div}}_T\) respectively in the Eucliden metric. In this paper, we study the following problem
where
and \(b_0\!>\!0\) is a constant. The initial data \(u_0\) and \(u_1\) are in suitable function spaces. The second-order differential operators \({\mathcal {A}}(x,t)\) and \({\mathcal {A}}_T(x,t)\) are given by
in which \(\beta \in W^{1,\infty }(0,\infty )\) is a given function and \(A(x)=(a_{ij}(x))_{n\times n}\) are symmetric and positive definite matrices functions with \(a_{ij}(x)\in C^{\infty }(R^n)\), and the operators also satisfy the uniform ellipticity conditions
for some constant \(\lambda >0\). And
is the outer normal derivative.
Since the boundaries \(\Gamma _0\) and \(\Gamma _1\) satisfy \(\Sigma ={\overline{\Gamma }}_0\cap {\overline{\Gamma }}_1\ne \emptyset \), the singularities occur when the boundary conditions change from \(\Gamma _0\) to \(\Gamma _1\). We cannot get the regularity of solution by the elliptic results, so we have to use some technicalities to overcome this difficulty. For the two-dimensional case, we can refer to the method in [1] to deal with the problem of lack of regularity, and for more on this can be seen in [2, 3]. The main idea in these papers is to divide the weak solution u corresponding to the elliptic problem into two parts that the regular part and the singular part. More precisely, they decompose the solution into
where \(u_1\in H^2(\Omega )\) and \(u_2\) is given by
here \((r,\theta )\) is a coordinate system centered on \(x\in \Sigma \) and \(\rho \) is an appropriately smooth function with a compact support satisfying \(0\le \rho \le 1\). This decomposition of u allows us to estimate some integrals that resulting from the existence of singularities. For the case of higher dimensions (\(n\ge 3\)), Bey et al. [4] extended the above results, and [4, Theorem 4] is very important and helpful for the proof of our stability. Later, Cornilleau et al. [5] further developed the results of [4] and considered the possible singularities in which they changed the boundary conditions along the interface \(\Sigma ={\overline{\Gamma }}_0\cap {\overline{\Gamma }}_1\). They assumed a partition \((\Gamma _0, \Gamma _1)\) of \(\Gamma =\partial \Omega \) such that
-
\(\Sigma ={\overline{\Gamma }}_0\cap {\overline{\Gamma }}_1\) is a \(C^3\)-manifold of dimension \(n-2\),
-
\((x-x_0)\cdot \nu =0\) on \(\Sigma \), where \(x_0\in R^n\) is a fixed point,
-
\(\Gamma \cap \varpi \) is a \(C^3\)-manifold of dimension \(n-1\),
-
\({\mathcal {H}}^{n-1}(\Gamma _0)>0\),
where \(n\!\ge \!2\) is the dimension of \(\Omega \), \(\varpi \) is a suitable neighborhood of \(\Sigma \) and \({\mathcal {H}}^{n-1}\) denotes the usual \((n\!-\!1)\)-dimensional Hausdorff measure. Under a simple geometrical condition concerning the orientation of the boundary, they obtained the stability results for systems with linear or nonlinear Neumann feedbacks.
It is worth noting that [4] and [5] mentioned here are the literature for the constant coefficients. For the variable coefficients case, we can refer to [6] which extended the stability results of [5] to a time-dependent coefficients case. In [6] Cavalcanti et al. concerned the following hyperbolic equation with boundary damping
where \(\Omega \subset R^n\) (\(n\ge 2\)) is a bounded open set with the boundary \(\Gamma =\Gamma _0\cup \Gamma _1\) such that \({\overline{\Gamma }}_0\cap {\overline{\Gamma }}_1\ne \emptyset \). Let \(x_0\in R^n\) be a fixed point, the sets \(\Gamma _0\) and \(\Gamma _1\) given by
Under some assumptions about the functions F, K and A, the authors obtained the exponential decay result by using the energy method.
Our work changes part of the boundary conditions in the above reference, that is, we study the influence of the dynamic boundary on the stability of system. This type of boundary condition takes acceleration into account on the boundary to affect the stability and the exact controllability of elastic structures. In [7], Li et al. considered the following one-dimensional system
At \(\kappa =1\), they got the optimal polynomial decay result, even though the system is exponentially stable if \(\kappa =0\). Thus, for the study of dynamic boundary, it not only is very important for theoretical significance, but also is a good reference for some practical applications. This kind of boundary is suitable for dynamic vibration modeling of linear viscoelastic rods and beams with attached masses at their free ends, we refer to the reference [8,9,10,11,12,13]. These questions are common in analyzing the mechanical behavior of any structure with elongated members attached to smaller, heavier objects, for example, a structure consisting of robotic arms attached to satellites. For early studies of the system with dynamic boundary conditions we can refer to [14,15,16]. [16] was devoted to study of the following damped Cauchy-Ventcel problem
where there exists a vector field H such that
The uniform energy decay rate for the above problem was established by Riemannian geometry method which was first introduced by Yao [17] to study the exact controllability of wave equation with variable coefficients. For more information about the variable coefficients that are only related to the space variable, we can refer to [18,19,20,21,22,23] and the references in them.
While for the time-varying coefficients case, we can refer to [24,25,26,27]. In [25], Liu considered the mixed problem
with Neumann boundary control
or Dirichlet boundary control
where \({\overline{\Gamma }}_0\cap {\overline{\Gamma }}_1=\emptyset \) and v is a suitable control function. The observability inequalities were established by the Riemannian geometry method under some geometric conditions. For more on time-dependent linear operators, evolution families, and evolution equations and their applications, we refer the reader to [28, 29] and the references therein.
Inspired by the above literature, in this paper we mainly study the system (1.1) with the assumption
In fact, there are two main difficulties in our work. First, because the coefficients are related to the time variable, we cannot accurately estimate the positive and negative properties of the derivative of the energy functional, which makes it impossible to get the stability results of the system by traditional methods. Second, we lose the regularity of solution due to the existence of singularities. So for these two main difficulties, we need more skills to deal with system (1.1) to get the decay result that we want.
The paper is organized as follows. Section 2 presents the notations and some assumptions that we need to follow. By using the semigroup method, we give the well-posedness result in Sect. 3. In Sect. 4, we obtain the exponential decay estimate of the energy. Finally, a concluding remark is stated in Sect. 5.
2 Preliminaries
In this section, we present some materials and assumptions used in this paper. \(\displaystyle L^2(\cdot )\) and \(\displaystyle H^1(\cdot )\) denote the usual Sobolev spaces. \(\displaystyle \Vert \cdot \Vert _2\) and \(\displaystyle \Vert \cdot \Vert _{2,\Gamma _1}\) are the norms in the \(\displaystyle L^2(\Omega )\) and \(\displaystyle L^2(\Gamma _1)\), respectively. For simplicity, we write \(\displaystyle \Vert \cdot \Vert \) and \(\displaystyle \Vert \cdot \Vert _{\Gamma _1}\) instead of \(\displaystyle \Vert \cdot \Vert _2\) and \(\Vert \cdot \Vert _{2,\Gamma _1}\), respectively. Let C denote various positive constants which may be different at different occurrences.
Denote
Since the Poincaré inequality holds in \(\displaystyle H_{\Gamma _0}^1(\Omega )\), then the apace \(\displaystyle H_{\Gamma _0}^1(\Omega )\) can be endowed with the norm \(\displaystyle \Vert \nabla \cdot \Vert \), which is equivalent to usual norm of \(\displaystyle H^1(\Omega )\).
2.1 Riemannian Notations
We define
as a Riemannian metric on \(R^n\) and consider the couple \((R^n,g)\) as a Riemannian manifold with the inner product and the norm
where \((\cdot ,\cdot )\) is the Euclidean product of \(R^n\). For any \(C^1\) function w, we define
where \(\nabla _g\) is the gradient of the metric g. Denote by D the Levi-Civita connection in the Riemannian metric g and let H be a vector field on \(R^n\), then for each \(x\in R^n\), the covariant differential DH of H determines a bilinear form on \(R^n\times R^n\):
where \(D_YH\) is the covariant derivative of the vector field H with respect to Y. Next we give the following lemma that provides some further relationships between the Riemannian metric g and the Euclidean metric.
Lemma 2.1
[17] Let \(f\in C^2\left( {\overline{\Omega }}\right) \) and H be vector field. Then, with the references to the above notations, we have
-
(i)
\(\displaystyle H(f)=\left\langle \nabla _gf,H\right\rangle _g=\nabla f\cdot H\),
-
(ii)
\(\displaystyle \left\langle \nabla _gf,\nabla _g(H(f))\right\rangle _g=DH\left( \nabla _gf,\nabla _gf\right) +\frac{1}{2}{\textrm{div}}\left( |\nabla _gf|_g^2H\right) -\frac{1}{2}|\nabla _gf|_g^2{\textrm{div}}H\),
where \({\textrm{div}}H\) is the divergence of the vector field H in the Euclidean metric.
2.2 Assumptions
(H1) Assume that \(\beta (t)\in W_{loc}^{1,\infty }(0,\infty ),\ \beta '(t)\in L^1(0,\infty )\) and
where \(\beta _0\) is some positive constant.
(H2) [30] Let H be a vector field on Riemannian manifold \((R^n,g)\), there exists a continuous function \(\sigma (x)\) such that
and denote \(\displaystyle \sigma _1=\min _{x\in {\overline{\Omega }}}\sigma (x)>0\) and \(\displaystyle \sigma _2=\max _{x\in {\overline{\Omega }}}\sigma (x)\). Moreover, assuming that the vector field H satisfies
and
Remark 2.2
The vector field H in assumption (H2), which called the escape vector field and firstly introduced by [31] as a checkable assumption. The existence of the vector field H depends on the Riemannian curvature of the metric g. In [32], we know that if assumption (H2) holds, then GCC (Geometric Control Condition) holds. And for the constant coefficients case i.e. considering \({\mathcal {A}}(x,t)\!=-\!\Delta \), many papers always take \(H\!=\!x\!-\!x_0\) where \(x_0\!\in \!R^n\) is a fixed point and \(x\!\in \!\Gamma \).
2.3 Main Results
Consider the phase space
endowed with the inner product
where \((\nabla _T)_gw=A(x)|_{\Gamma _1}(\nabla _T)w\) for any \(C^1\) function w. Taking \(\displaystyle U(t)=(u,u_t,\gamma _1(u),\gamma _1(u_t))^T\) with the trace operator \(\displaystyle \gamma _1(\cdot )=\cdot |_{\Gamma _1}\), the system (1.1) can be rewritten by
where the time-dependent linear operators \({\mathbb {A}}(t)\) have the form
with domain
which means D(A(t)) do not depend on t.
Now, we state the well-posedness result for the Cauchy problem (2.2), which ensures that the system (1.1) is globally well-posed.
Theorem 2.3
Suppose that \(({{\textbf {H1}}})\) and \(({{\textbf {H2}}})\) hold. Then for any \(U_0\in {\mathcal {H}}\), the problem (2.2) admits a unique solution U(t) such that
Further, assuming
where \(\tau \) is the unit tangent vector pointing towards the exterior of \(\Gamma _1\), from \(\Gamma _1\) to \(\Gamma _0\). In fact, for \(A(x)=I\), this geometric assumption (2.3) is the same as in [4, 5] when taking the vector field \(H=x-x_0\) where \(x_0\in R^n\) is a fixed point and \(x\in \Sigma \).
Define the associated energy of system (1.1) by
according to the inner product of state space \({\mathcal {H}}\). Our main decay result can be given as follows
Theorem 2.4
Assume that (H1), (H2) and (2.3) hold and there exist positive constants \(C_2\), \(\alpha \) and m such that for all t sufficiently large, it holds
Then the energy decay exponentially, i.e.,
Remark 2.5
For assumption (2.5), we give the following two examples for the function \(\beta (s)\).
Example \(({\textrm{i}})\). Let \(\displaystyle \beta (s)=ae^{-bs}+\beta _0\) with \(a>0\) and \(b\ge C_2>0\). It is obviously that taking \(\beta \) to satisfy \(({\textbf {H1}})\). By direct calculation, we have
and
Therefore, there exist positive constants \(\alpha \) and m such that for all t sufficiently large, (2.5) holds.
Example \(({\textrm{ii}})\). Let \(\displaystyle \beta (s)=se^{-as}+\beta _0\) with \(a\ge C_2>0\). It is obviously that taking \(\beta \) to satisfy \(({\textbf {H1}})\). By direct calculation, we have
and
Therefore, there exist positive constants \(\alpha \) and m such that for all t sufficiently large, (2.5) holds.
3 Well-Posedness
In this section, we study the existence and uniqueness of the solution to system (1.1), that is, using the semigroup method to prove Theorem 2.3.
Proof of Theorem 2.3
This proof is divided into four main steps.
Step 1. The first step is to prove that the linear operators \({\mathbb {A}}(t)\) are dissipative. Indeed, let \(U=(v_1,v_2,v_3,v_4)^T\in D({\mathbb {A}}(0))\), using (2.1) and the fact of \(v_1=v_3,\ v_2=v_4\ {\textrm{on}}\ \Gamma _1\), we have
which yields the operators \({\mathbb {A}}(t)\) are dissipative.
Step 2. In this step, we prove the surjection of the operators \(\displaystyle I-{\mathbb {A}}(t)\), where I stands for the identity operator. In fact, set \(\displaystyle F=(f_1,f_2,f_3,f_4)^T\in {\mathcal {H}}\), we will prove that there exists \(\displaystyle U=(v_1,v_2,v_3,v_4)^T\) such that
which is equivalent to
From the first and third equations of (3.1), we obtain
Substituting the equations of (3.2) into the second and the forth equations of (3.1), we have
This is an elliptic system of two equations. For \((\varphi _1,\psi _1),\ (\varphi _2,\psi _2)\in H_{\Gamma _0}^1(\Omega )\times H^1(\Gamma _1)\), we introduce the following bilinear form
It is easy to show that \(B((\varphi _1,\psi _1),(\varphi _2,\psi _2))\) is a bounded bilinear form and
is coercive. Then by using the conditions of \(v_1=v_3,\ \varphi =\psi \ {\textrm{on}}\ \Gamma _1\), we can find \((v_1,v_3)\in H_{\Gamma _0}^1(\Omega )\times H^1(\Gamma _1)\), such that for all \((\varphi ,\psi )\in H_{\Gamma _0}^1(\Omega )\times H^1(\Gamma _1)\), the following holds
Therefore, the system (3.3) admits a unique weak solution \((v_1,v_3)\in H_{\Gamma _0}^1(\Omega )\times H^1(\Gamma _1)\) by the well-known Lax-Milgram theorem. And we deduce from (3.2) that \(\displaystyle v_2\in H_{\Gamma _0}^1(\Omega ) (\hookrightarrow L^2(\Omega ))\) and \(\displaystyle v_4\in H^1(\Gamma _1) (\hookrightarrow L^2(\Gamma _1))\). This implies that \(U\in {\mathcal {H}}\) which gives us the desired solution.
Step 3. Define a vector valued function \(h:R_+\rightarrow {\mathcal {H}}\) with \(h(t)={\mathbb {A}}(t)U\). We will prove in this step that h is differentiable and its Frechet derivative is the vector valued function
where
and
Indeed, it is quite obvious that \(h'(t)\in {\mathcal {H}}\) for \(t\ge 0\). And for any \(t, \tau \ge 0\) with \(t\ne \tau \), we have
Then
which yields
We have
Hence according to the chapters 5 of Pazy’s book [33], we define the solution operators of the initial value problem
by
where \({\widetilde{U}}(t)\) is the solution of (3.4) and W(t, s) is a two parameter family of operators. Then, the evolution equation (2.2) has a unique mild solution
Step 4. Let us show that \(T_{\textrm{max}}=\infty \). From the definition of energy (2.4), we have
and
The above inequality gives
Let
we have
Then using (2.1), (2.4) and (3.6), we have
where \(\displaystyle U=(u,u_t,\gamma _1(u),\gamma _1(u_t))^T\in {\mathcal {H}}\). Therefore, the local solution cannot blow-up in finite time and it follows that \(T_{\textrm{max}}=\infty \). \(\square \)
Remark 3.1
It is worth noting that in this paper we assumes that \({\overline{\Gamma }}_0\cap {\overline{\Gamma }}_1\ne \emptyset \), so we cannot use the elliptic regularity argument to get \(u\in H^2(\Omega )\) and \(\gamma _1(u)\in H^2(\Gamma _1)\) from
Then, for the more regular initial data \(U_0\in D({\mathbb {A}}(0))\), we do not have a more regular solution \(U\in C(R_+;D({\mathbb {A}}(0)))\cap C^1(R_+;{\mathcal {H}})\).
4 Decay Result
Because of the existence of singularities, we need to avoid them in the following work. As in [6], let \(\delta >0\) be a small and fixed constant and consider
where \(B(x,\delta )=\{y\in \Omega :|x-y|<\delta \}\). Denote

The new domain \(\Omega _\delta \) for \(n=2\)
Next, we will study the stability result of the corresponding system in \(\Omega _\delta \) (see Fig. 2), whose boundary is defined as
where
and
Then the system (1.1) is transformed into the following system
Define the energy associated with the problem (4.1) in \(\Omega _\delta \) by
then by a simple calculation, we have
Lemma 4.1
The functional
satisfies
where \(\varepsilon _1\) and \(\varepsilon _2\) are some positive constants, \(C_t\) is the smallest possible positive constant produced by the trace theorem and Poincar\(\acute{e}\) inequality and \(C_p>0\) is the Poincar\(\acute{e}\) optimal embedding constant.
Proof
Taking the derivative of (4.4) with respect to the variable t and using (4.1) and Green formula yield
Making use of Young’s inequality, Poincaré inequality, the trace theorem and (H1), we have
and
Thus, taking (4.7) and (4.8) into (4.6), (4.5) is obtained. \(\square \)
Lemma 4.2
Suppose that H is the vector field defined in assumption \(({\textbf {H2}})\), and define \(H_T =H-(H\cdot \nu )\nu \). Then, the functional
satisfies
where \(\epsilon _1\), \(\epsilon _2\) and \(c_\sigma \) are some positive constants.
Proof
Taking the derivative of (4.9) with respect to the variable t and using (4.1) and Green formula yield
We begin to deal with the terms on the right of (4.11). Since the assumption (H2), we have
then there are positive constants \(c_\sigma \) and \(C_\sigma \) such that
Using the divergence theorem, (H2) and the fact of \(H_T\cdot \nu =0\), we have
Using Lemma 2.1 and (H2), we get
And using Young’s inequality, we have
and
where \(\epsilon _1>0\) and \(\epsilon _2>0\) are some constants. Substituting (4.12)–(4.15) into (4.11), we obtain
Now, we are going to estimate the integrals over \(\partial \Omega _\delta \). On \({\widetilde{\Gamma }}_0\cup {\widetilde{\Gamma }}_1\), we have
and
Since \(u=u_t=0\) on \({\widetilde{\Gamma }}_0\), it hold that
then
Combining (4.16) and (4.17), we infer that
Therefore, using (H2), we obtain (4.10). \(\square \)
Next we define the perturbed energy associated with \(\Omega _\delta \) by
where N and \(\theta \) are some positive constants.
Lemma 4.3
If
then
where
and
Proof
Using Lebesgue dominated convergence theorem, we can easily obtain Lemma 4.3. \(\square \)
Obviously, for N large enough, we have
Moreover, due to (3.6), there exists a positive constant \(\beta _2\) such that
Proof of Theorem 2.4
Differentiating (4.19) and taking (4.3), (4.5) and (4.10) into it, we have
where \(C_H>0\) is some constant depending on H. Thus, we choose \(\varepsilon _1\), \(\varepsilon _2\), \(\epsilon _1\) and \(\epsilon _2\) small enough such that
and
Fixing them, choosing \(\theta \) sufficiently small and N lager enough such that
and
Therefore, combining (4.20) and (4.21) we obtain
where
and
Then, integrating (4.22) from 0 to t, we obtain
where \(\displaystyle C_2>0\) is some constant.
\(\bullet \) Estimate for \(\displaystyle L_\delta (t):=\displaystyle \int \nolimits _0^te^{C_2s}\Theta _\delta (s)ds\)
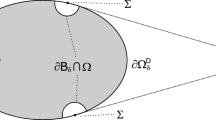
(i) For \(n=2\), at each point \(\displaystyle {\tilde{x}}\in \Sigma \), we can build the vectors \(\displaystyle {\tilde{\nu }}=\nu ({\tilde{x}})\) and \(\displaystyle {\tilde{\tau }}=\tau ({\tilde{x}})\) which depend on \({\tilde{x}}\) and \(\Omega \). \({\tilde{\nu }}\) is the unit normal vector pointing towards the exterior and \({\tilde{\tau }}\) is the tangent vector pointing towards from \(\Gamma _1\) to \(\Gamma _0\). If \(\delta \) is small enough, each point \(\displaystyle x\in \Gamma _\delta \) belongs to one and only one coordinate system \(\displaystyle ({\tilde{x}},{\tilde{\nu }},{\tilde{\tau }})\) and x belongs to some arc of circle \(\displaystyle \partial B({\tilde{x}},\delta )\) contained in this coordinate system (see Fig. 3).

The vectors \(\nu \), \(\tau \), \({\tilde{\nu }}\) and \({\tilde{\tau }}\) for \(n=2\)
We decompose the solution
where \(\displaystyle u_1\in H^2(\Omega )\), \(\eta \) is locally in \(\displaystyle H^{\frac{1}{2}}(\Sigma )\) and \(U_2\) is given by
where \(\rho \) is a \(\displaystyle C^\infty \)-function with compact support such that \(\displaystyle \rho (r)=1\) in some neighbourhood of 0 and \(\displaystyle {\textrm{supp}}(\rho )\subset [-\varrho ,\varrho ]\subset (-1,1)\), where \(\varrho >0\) is as small as we want. Then, using coordinate in \(({\tilde{x}},{\tilde{\nu }},{\tilde{\tau }})\), similar to [4], we have
where \({\tilde{H}}=H({\tilde{x}})\) with \({\tilde{H}}\cdot {\tilde{\nu }}=0\). When \(\delta \rightarrow 0\), \(\partial B({\tilde{x}},\delta )\) behaves as a half-circle, then we obtain
Integrating (4.24) along \(\partial B({\tilde{x}},\delta )\), we get
Therefore, integrating the regular part of solution \(u_1\) on \(\partial B({\tilde{x}},\delta )\) and using Cauchy-Schwarz inequality, Lebesgue dominated convergence theorem, (2.3) and the compactness of function \(\rho \), we obtain that \(L_\delta (t)\) has a limit of non-positive number as \(\delta \rightarrow 0\).
(ii) For \(n\ge 3\), when \(\delta \) is small enough, we also know that each point \(\displaystyle x\in \Gamma _\delta \) belongs to one and only one plane defined by \(\displaystyle ({\tilde{x}},{\tilde{\nu }},{\tilde{\tau }})\), and x belongs to some arc of circle \(\displaystyle l({\tilde{x}},\delta )\) contained in this plane (the figure is similar to Fig. 3).
Firstly, just like in the case of \(n=2\), we write
then
Since \(u_1\in H^2(\Omega )\) and meas\((\partial B({\tilde{x}},\delta ))\rightarrow 0\) as \(\delta \rightarrow 0\) and using the regularity of \(\beta (t)\) and A(x), it is easy to get
Further, let us do the decomposition of \(\nabla u_2\):
where \(\nabla _2u_2\) belongs to the plane \(({\tilde{x}},{\tilde{\nu }},{\tilde{\tau }})\) defined above and \(\nabla _Xu_2\) is orthogonal to \(\nabla _2u_2\), i.e.,
Then
Thanks to the first part of Theorem 4 in [4] and the Lebesgue dominated convergence theorem, we get
And as \(u_2(x)=\eta ({\tilde{x}})U_2(x-{\tilde{x}})\), using the Fubini’s theorem, we have
and know that this integral is bounded using \(\eta \in H^{\frac{1}{2}}(\Sigma )\) and the definition of \(U_2\). So we can end up with
Therefore, making use of Cauchy-Schwarz inequality, we obtain
It tends to zero since the first term vanishes as \(\delta \rightarrow 0\) and the second one is bounded. And finally we start to deal with the term \(I_\delta (\nabla u_2)\). Similar to the above process, we decompose \(\nabla u_2\) and have
As above, \(I_\delta (\nabla _Xu_2)\rightarrow 0\) as \(\delta \rightarrow 0\). Since
we have the first term vanishes as \(\delta \rightarrow 0\) and the second one is bounded, thus we obtain \(J_\delta (\nabla _Xu_2,\nabla _2u_2)\) tends to zero. For \(I_\delta (\nabla _2u_2)\), as the case of \(n=2\), we also have
and
In other words, this integral term on \(l({\tilde{x}},\delta )\) is bounded. Then, the dominated convergence theorem can be used to get
Therefor, using the assumption (2.3), we know that \(I_\delta (\nabla _2u_2)\) converges to a non-positive number.
In conclusion, we infer
where \(\zeta \le 0\) is a real number. When \(\zeta <0\), then there exists \(\delta _1>0\) such that
and
When \(\zeta =0\), we need to talk about two cases. One case is that there exists a positive constant \(\delta _2\) such that
Then the process is the same as \(\zeta <0\). The other case is that there exists a positive constant \(\delta _3\) such that
Then
i.e.,
Thus, we get
\(\bullet \) Estimate for \(M_\delta (t):=\displaystyle \int \nolimits _0^te^{C_2s}\Lambda _\delta (s)ds\)
Just like we did above, we split u into two parts, this is,
where \(\displaystyle u_1\in H^2(\Omega )\) is the regular part and \(u_2=\eta \cdot U_2\) is the singular part, then
Using Cauchy-Schwarz inequality and the above results, we have
and
Taking (4.27)–(4.30) into (4.26) and using Lebesgue dominated convergence theorem allow us to get
Analogously,
On the other hand, using the decomposition of u into a regular part and a singular part, we have
From the dominated convergence theorem, we have
As
we get
Then it follows
Therefore, combining (4.31)–(4.33), we get
In conclusion, let \(\delta \rightarrow 0\) and taking (4.25) and (4.34) into (4.23), we have
Then, using the energy equivalence relation and (2.5), we get
Thus, we complete the proof of Theorem 4.4. \(\square \)
5 Conclusions
In this paper, we present a study on the stability of a time-varying coefficients wave equation in the bounded domain \(\Omega \). The smooth boundary of \(\Omega \) is \(\Gamma =\Gamma _0\cup \Gamma _1\) such that \(\Sigma ={\overline{\Gamma }}_0\cap {\overline{\Gamma }}_1\ne \emptyset \). We consider that a homogeneous Dirichlet boundary on \(\Gamma _0\) and a dynamic boundary with damping term on \(\Gamma _1\). Since the coefficients depends on the time variable and the singularities are generated by changing the boundary conditions along the interface, these bring no small difficulty to our proof, so some special techniques are needed to deal with these problems. Under the appropriate geometric assumptions, the exponential decay result of the system is established by the Riemannian geometry method and the energy perturbation method.
There are many other issues associated with this type of problem, but we have not studied them here.
-
(i)
The geometric conditions (H2) and (2.3) are essential in the proof of our exponential stability result, but their necessity leads us to exclude many mathematical models of interest that should also be uniformly stable.
-
(ii)
We assume that there are no external forces acting on the system or its boundary other than friction. If there is thermal force in system, can the energy still be uniformly stable? What if there is a nonlinear negative source term on \(\Gamma _1\)?
Data Availability Statement
Data sharing not applicable to this article as no datasets were generated or analysed during the current study.
References
Grisvard, P.: Exact controllability of solutions of the wave equation in the presence of singularities. J. Math. Pures Appl. 68, 215–259 (1989)
Grisvard, P.: Elliptic Problems in Nonsmooth Domains. Pitman, London (1982)
Grisvard, P.: Singularities in Boundary Value Problems. Springer, Berlin (1992)
Bey, R., Lohéac, J.-P., Moussaoui, M.: Singularities of the solution of a mixed problem for a general second order elliptic equation and boundary stabilization of the wave equation. J. Math. Pures Appl. 78(10), 1043–1067 (1999)
Cornilleau, P., Lohéac, J.-P., Osses, A.: Nonlinear Neumann boundary stabilization of the wave equation using rotated multipliers. J. Dyn. Control Syst. 16(2), 163–188 (2010)
Cavalcanti, M.M., Domingos Cavalcanti, V.N., Vicente, A.: Stability for a nonlinear hyperbolic equation with time-dependent coefficients and boundary damping. Z. Angew. Math. Phys. 73(6), 1–20 (2022)
Li, C., Liang, J., Xiao, T.J.: Boundary stabilization for wave equations with damping only on the nonlinear Wentzell boundary. Nonlinear Anal. 164, 155–175 (2017)
Krenk, S.: Dynamics of Structures. McGraw-Hill, New York (1975)
Banerjee, A.K., Kane, T.R.: Extrusion of a beam from a rotating base. J. Guidance Control Dyn. 12(2), 140–146 (1989)
Banks, H.T., Fabiano, R.H., Wang, Y.: Inverse problem techniques for beams with tip body and time hysteresis damping. Mat. Apl. Comput. 8(2), 101–118 (1989)
Chang, T.P.: Forced vibration of a mass-loaded beam with a heavy tip body. J. Sound Vib. 164(3), 471–484 (1993)
Lee, H.P.: Vibration of an axially moving beam with a tip mass. Mech. Res. Commun. 20(5), 391–397 (1993)
Andrews, K.T., Kuttler, K.L., Shillor, M.: Second order evolution equations with dynamic boundary conditions. J. Math. Anal. Appl. 197(3), 781–795 (1996)
Dalsen, G.V.: On fractional powers of a closed pair of operators and a damped wave equation with dynamic boundary conditions. Appl. Anal. 53(1–2), 41–54 (1994)
Dalsen, G.V.: On the initial-boundary-value problem for the extensible beam with attached load. Math. Methods Appl. Sci. 19(12), 943–957 (1996)
Cavalcanti, M.M., Khemmoudj, A., Medjden, M.: Uniform stabilization of the damped Cauchy-Ventcel problem with variable coefficients and dynamic boundary conditions. J. Math. Anal. Appl. 328(2), 900–930 (2007)
Yao, P.F.: On the observability inequality for exact controllability of wave equations with variable coefficients. SIAM J. Control Optim. 37(5), 1568–1599 (1999)
Hao, J.H., Du, F.Q.: Decay rate for viscoelastic wave equation of variable coefficients with delay and dynamic boundary conditions. Math. Methods Appl. Sci. 44(1), 284–302 (2021)
Du, F.Q., Hao, J.H.: Energy decay for wave equation of variable coefficients with dynamic boundary conditions and time-varying delay. J. Geom. Anal. 33(4), 1–26 (2023)
Mohamed, F., Ali, H.: Global existence and energy decay result for a weak viscoelastic wave equations with a dynamic boundary and nonlinear delay term. Comput. Math. Appl. 71(3), 779–804 (2016)
Akram, B.A., Mohamed, F.: Stability result for viscoelastic wave equation with dynamic boundary conditions. Z. Angew. Math. Phys. 69(4), 1–13 (2018)
Feng, B.W.: General decay rates for a viscoelastic wave equation with dynamic boundary conditions and past history. Mediterr. J. Math. 15(3), 1–17 (2018)
Hao, J.H., Du, F.Q.: Decay and blow-up for a viscoelastic wave equation of variable coefficients with logarithmic nonlinearity. J. Math. Anal. Appl. 506(1), 1–20 (2022)
Al-Khulaifi, W., Diagana, T., Guesmia, A.: Well-posedness and stability results for some nonautonomous abstract linear hyperbolic equations with memory. Semigr. Forum. 105(2), 351–373 (2022)
Liu, Y.X.: Exact controllability of the wave equation with time-dependent and variable coefficients. Nonlinear Anal. Real World Appl. 45, 226–238 (2019)
Cavalcanti, M.M.: Exact controllability of the wave equation with mixed boundary condition and time-dependent coefficients. Arch. Math. 35(1), 29–57 (1999)
Cavalcanti, M.M., Domingos Cavalcanti, V.N., Soriano, J.A.P.: Existence and boundary stabilization of a nonlinear hyperbolic equation with time-dependent coefficients. Electron. J. Differ. Equ. 1998(08), 1–21 (1998)
Lunardi, A.: Analytic Semigroups and Optimal Regularity in Parabolic Problems, PNLDE Vol. 16. Birkhäuser Verlag, Basel (1995)
Diagana, T.: Semilinear Evolution Equations and Their Applications. Springer, Cham (2018)
Cao, X.M., Yao, P.F.: General decay rate estimates for viscoelastic wave equation with variable coefficients. J. Syst. Sci. Complex. 27, 836–852 (2014)
Yao, P.F.: Modeling and Control in Vibrational and Structural Dynamics—A Differential Geometric Approach. Applied Mathematics and Nonlinear Science Series. CRC Press, Chapman and Hall/CRC (2011)
Ning, Z.H.: Asymptotic behavior of the nonlinear Schrödinger equation on exterior domain. Math. Res. Lett. 27(6), 1825–1866 (2020)
Pazy, A.: Semigroups of Linear Operators and Applications to Partial Differential Equations. Springer, New York (1983)
Acknowledgements
This work was partially supported by National Natural Science Foundation of China (12271315), the special fund for Science and Technology Innovation Teams of Shanxi Province (202204051002015), Fundamental Research Program of Shanxi Province (202203021221018), the Research Project Supported by Shanxi Scholarship Council of China (2021-008).
Author information
Authors and Affiliations
Contributions
All authors contributed to the study conception and design. Material preparation, data collection and analysis were performed by all authors. All authors wrote the first draft of the manuscript and commented on previous versions of the manuscript. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Conflict of Interest
The authors declare there is no conflict of interest.
Ethical Approval
This article does not contain any studies with human participants or animals performed by the authors.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Hao, J., Du, F. Exponential Decay for a Time-Varying Coefficients Wave Equation with Dynamic Boundary Conditions. J Geom Anal 34, 151 (2024). https://doi.org/10.1007/s12220-024-01595-9
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s12220-024-01595-9