
Abstract
Optical tweezers are a key technique for trapping and contactless manipulation of particles at the micro- and nanoscale that can exert and sense forces from hundreds of piconewton down to few femtonewton. In their simplest implementation, they are based on a single laser beam tightly focused to a high-intensity diffraction-limited spot. Here, after reviewing the general theoretical background on optical forces, we focus on their calibration and show a comparison between frequency and time domain methods. Then, we show novel measurements and calculations of optical forces on gold nanoparticles discussing their size scaling behavior. Finally, we describe recent applications of chiral optical trapping to soft materials, and integration of optical tweezers with Raman spectroscopy for ultra-sensitive spectroscopy of biomolecules in liquids.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Despite the idea that light exerts a mechanical action on matter has been known since Kepler’s explanation of comet tails, the advent of the laser has led to tremendous experimental advances and understanding of this phenomenon (Jones et al. 2015). Optical trapping of particles is a consequence of the radiation force that stems from the conservation of electromagnetic momentum upon scattering. When a laser beam is focused by a lens of high numerical aperture (such as a microscope objective), the configuration of the light intensity is such that the radiation force exerted on a particle attracts it toward the focal region (Ashkin 1970, 1992; Ashkin et al. 1986). Since its first demonstration in 1986 (Ashkin et al. 1986), the single-beam laser trap, optical tweezers, has become a commonly used tool for the manipulation of micro- (Dholakia and Čižmár 2011; Padgett and Bowman 2011) and nanostructures (Maragò et al. 2013), and as a force transducer with resolution at the femtonewton (Neuman and Nagy 2008). Optical tweezers find applications in many fields of physics, biology, chemistry, and material sciences. They are useful tools to sort and organize cells, control bacterial motion, measure linear and torsional forces, alter biological structures via modification of cellular membranes, cellular fusion, or the interaction between red blood cells and viruses (Fazal and Block 2011; Ashkin and Dziedzic 1987; Ashkin et al. 1987; Svoboda and Block 1994a). The possibility to apply and measure forces with femtonewton sensitivity (Neuman and Nagy 2008; Maragò et al. 2008, 2010a; Irrera et al. 2011) on micro- and nanometer-sized particles, and at the same time, to measure their displacements with nanometric precision is of crucial importance for the investigation of colloids and polymers properties, of the visco-elastic properties of complex fluids, and in general can be applied to a wide variety of soft-matter and biological systems (Fazal and Block 2011; Neuman and Nagy 2008).
When dealing with quantitative measurements, a crucial point is a correct calibration of the optical tweezers. Back focal plane interferometry is generally used to collect scattered and unscattered light from a trapped particle onto a position-sensitive detector (Pralle et al. 1999). The resulting signals can be processed yielding particle tracking with nanometric precision. To analyze this tracking different methods have been used that rely on both frequency, power spectrum (Berg-Sorensen and Flyvbjerg 2004; Buosciolo et al. 2004), and time domain, correlation functions (Bar-Ziv et al. 1997), variance sampling (Henderson et al. 2001), analysis of the tracking signals. Such precise calibration of optical tweezers has been the key to the realization of photonic force microscopy (PFM), a scanning probe technique based on observing the motion of an optically trapped probe particle held in calibrated optical tweezers as scanned over a surface (Ghislain and Webb 1993; Florin et al. 1997). One of the recent exciting developments of PFM is the use of 3D tracking methods to reconstruct the position of the trapped particle with a spatial resolution of few nanometers and a temporal resolution in the microsecond range that enables to explore small volumes to reveal information about the interaction of the probe with the local environment (Phillips et al. 2011, 2014; Olof et al. 2012). The integration of optical tweezers with ultra-sensitive spectroscopic techniques has brought to the realization of Raman tweezers (Petrov 2007). This novel technique allows to detect the Raman signal of trapped particles (cells, red blood cells, nanotubes, graphene, proteins, etc.) in liquid, i.e., in their most natural environment (Maragò et al. 2010a, b; Xie et al. 2002; De Luca et al. 2007).
In this paper, we first review the basic theory of optical tweezers detailing the different trapping regimes depending on particle size, then we describe a typical experimental setup used in our laboratory that enables optical force measurements on different types of micro- and nanoparticles, we compare the different methods used for optical tweezers calibration showing a full analysis of thermal fluctuations in the optical trap in both frequency and time domain. Then, we show results on the scaling behavior of optical forces on gold nanoparticles, comparing experiments with full electromagnetic theory in the T-matrix approach. Finally, we describe recent achievements on chiral optical tweezers and the integration of optical tweezers with Raman and surface-enhanced Raman spectroscopies for the ultra-sensitive detection of biomolecules in liquid environment.
2 Theory of optical forces
From a theoretical point of view, optical trapping has been often modeled within strong approximations. When the particle is much smaller, dipole approximation, or much bigger, ray optics, of the light wavelength, simplifications can be done in the calculation of the force exerted by an optical tweezers. When the particle dimensions are comparable with the light wavelength, a complete wave-optical modeling of the particle–light interaction is necessary for calculating the optical trapping forces. The situation becomes even more complex for non-spherical or anisotropic particles that are of particular importance for modeling biological structures, metallic, dielectric or hybrid nanostructures. In this Section, we first discuss optical forces in the ray optics regime, then we review the theory of optical tweezers in the dipole approximation, and finally we sketch the theory and modeling of optical forces in the framework of light scattering theory with a focus on T-matrix methods.
2.1 Ray optics
Let us consider a particle with a characteristic dimension \(a\) and refractive index \(n_{\rm p}\), immersed in a medium with refractive index \(n<n_{\rm p}\) (typically water or air), and illuminated by a laser beam with wavelength in vacuum \(\lambda _{0}\) and wavenumber \(k=2\pi n/\lambda _{0}\) in the medium surrounding the particle. When the particle size is bigger than the wavelength of the light, that is \(ka\gg 1\), optical trapping forces can be calculated using ray optics approximation (Ashkin 1992).

a A light beam can be approximated as the sum of many light rays. The multiple scattering of a light ray on a spherical particle yields a transfer of momentum from the light to the particle and hence a force. b For small displacements a single-beam laser trap can be approximated by a harmonic potential. c Sketch of a scattering process by a non-spherical particle or cluster. The calculation of the scattered fields is the key to obtain the optical forces and torques on the object
In this regime, the optical field can be described in terms of a collection of \(N\) rays to which is associated a certain portion, \(P_{i}\), of the incident power, \(P=\sum _{i} P_{i}\), and a linear momentum per second \(nP_{i}/c\). To understand the trapping phenomenon we can consider only a single ray incoming on a dielectric spherical particle (Fig. 1a). When the ray impinges on the surface of the particle, it is refracted inside causing a change of direction and therefore an alteration in the linear momentum associated to the ray. The change in momentum of the ray will cause a reaction force on the center-of-mass of the particle. More precisely, when an incident ray \({\mathbf R} _{\it i}\) hits the particle, part of its power is split into a reflected ray \({\mathbf R}_{r}^{{(0)}}\) and a transmitted ray \({\mathbf R} _{t}^{{(0)}}\). Most of the power carried by the incident ray is delivered to the transmitted ray that travels inside the particle until it impinges on the opposite surface. Here, it is reflected and transmitted again and a large portion of the power is transmitted outside the sphere by \({\mathbf R} _{t}^{{(1)}}\). The process will continue until all the light escapes from the sphere. By considering these multiple reflection and refraction events the optical force can be calculated directly as (Callegari et al. 2014):
where \({\widehat{{\mathbf {r}}}}_{i}\), \({\widehat{{\mathbf {r}}}}_{r}^{{(j)}}\), and \({\widehat{{\mathbf {r}}}}_{t}^{{(j)}}\) are the unit vectors in the direction of the incident, \(j\)th reflected and transmitted rays, respectively. \(P_{i}\), \(P_{r},\) and \(P_{t}^{{(j)}}\) are the incident, reflected, and transmitted powers, respectively, calculated using Fresnel’s reflection and transmission coefficients (Callegari et al. 2014). The force \({\mathbf F} _{\rm ray}\) in Eq. 1 has components only in the incidence plane and can be split into two perpendicular components. The component in the direction of the incoming ray \({{\widehat{{\mathbf {r}}}}_{i}}\) represents the scattering force, \({\mathbf {F}}_{\rm ray,scat}\), that pushes the particle away from the center of the trap. The component perpendicular to the incoming ray is the gradient force, \({\mathbf {F}}_{\rm ray,grad}\), that pulls the particle toward the optical axis when \(n<n_{\rm p}\). Instead, if \(n>n_{\rm p}\), e.g., the case of a microbubble (Jones et al. 2007), the particle is pushed away from the high-intensity focal region.
The dimensionless quantity, trapping efficiency, obtained dividing the force components \(F_{\rm ray,scat}\) and \(F_{\rm ray,grad}\) by \(nP_{i}/c\) quantifies how efficiently the momentum is transferred from the ray to the particle. Ashkin (1992) derived the following theoretical expression for the scattering and gradient efficiencies of a circularly polarized ray on a sphere:
where \(R\) and \(T\) are the Fresnel reflection and transmission coefficient, and \(\theta _i\) and \(\theta _r\) are the incidence and transmission angle relative to the scattering of the incident beam.
Generally, most of the momentum transferred from the ray to the particle is due to only the first two scattering events, especially for small angle of incidence. To model an optical trap, we do not have to consider only a single incident ray but to model a highly focussed laser beam, that is a set of many rays that converge at a very large angle. This means that the total force acting on the particle is the sum of all the contributions from each ray forming the beam.
For a single-beam optical trap, the focussed rays will produce a restoring force proportional to the particle’s displacement. Hence, in one direction, \(x\), for very small displacements, we have a harmonic response (Fig. 1b) of the type \(F_{x}\approx -\kappa _x x\), where \(\kappa _{x}\) is the spring constant or trap stiffness in the \(x\) direction and the origin of the axis is taken at the trap equilibrium position. Calculating or measuring \(\kappa _{x}\) gives a calibration of the optical trap.
The geometrical optics approach can be also used when we deal with non-spherical particle, such as cylindrical objects. The basic interaction of the ray with these kinds of particles is the same introduced in Eq. 1, but now two new aspects must be considered: induced torque and transverse radiation force. Induced torque is calculated from the difference of the angular momentum associated with the incoming and outgoing ray with respect to a pole. For example, the effect of the torque due to the rays is to align a cylindrical particle along the optical axis. The second aspect, transverse radiation force, yields the optical lift effect (Swartzlander Jr et al. 2011). This component arises from the anisotropic shape of non-spherical particles and generates a motion transversely to the incident light propagation direction.
Note that the accuracy of ray optics approximation increases with the size of the particle, whereas exact electromagnetic theories become unpractical due to the increasing computational complexity. Thus, ray optics has not only a pedagogical value but also represents a key technique for modeling optical trapping of large particles (Skelton et al. 2012).
2.2 Dipole approximation
When the particle’s size is smaller than the light wavelength (\(k a\ll 1\)), the particle can be approximated as a dipole (Gordon 1973; Chaumet and Nieto-Vesperinas 2000) and the electromagnetic field can be considered homogeneous inside the particle (\(k a|n_{p}/n|\ll 1\)). Under these conditions, an incident electromagnetic field \({\mathbf E} ({\mathbf r} ,t),\) that is not too strong, yields an induced dipole moment, \({\mathbf p} ({\mathbf r} ,t)\), that can be expressed in terms of the particle polarizability:
where \(\alpha _{p}\) is the relative complex polarizability of the particle to the surrounding medium and it is given by Draine (1988):
with \(\alpha _{0}\) being the static Clausius–Mossotti polarizability:
where \(\epsilon _{0}\) is the vacuum permittivity and \(m\) is the ratio of \(n_{p}/n\).
Thus, the time-averaged optical force experienced by a small particle when illuminated by time-varying electromagnetic field can be expressed in terms of cross-sections and particle’s polarizability (Albaladejo et al. 2009):
here \(\sigma _{\rm ext}=k {\Im} \{\alpha _p\}/\varepsilon _{0}\), is the extinction cross-section defined as the ratio between total power removed from the electromagnetic field by the dipole and the intensity of the incident electromagnetic field, \(\langle {\mathbf {S}}\rangle \) is the time-averaged Poynting vector of the incoming wave, and \(\langle {\mathbf {L}}_{\rm spin}\rangle \) is the time-averaged spin angular momentum density (Albaladejo et al. 2009).
The first term in Eq. 7 represents the gradient force in dipole approximation and is responsible for particle confinement in optical tweezers:
where \(I({\mathbf r} )=\frac{1}{2}c\epsilon _{0}\vert E\vert ^{{2}}\) is the intensity of the light. The gradient force arising from the potential energy of a dipole immersed in the electric field is conservative and its work does not depend on the path taken. Particles with refractive index higher than that of the surrounding medium, \(n_p>n\), have a positive \({{\Re} }\left\{ \alpha _p\right\} \), and will be attracted toward the high-intensity region of the optical field (Ashkin et al. 1986). Conversely, when \(n_p<n\) the real part of the polarizability is negative and the particles are repelled by the high-intensity region.
As an example let us consider an incident laser beam with a typical Gaussian intensity profile:
where \(\rho \) is the radial coordinate in the transverse plane, \(I_0\) is the maximum intensity, and \(W_0\) is the laser beam waist. For small displacement about the beam focus (\(\rho /W_0\ll 0\)) we can expand the profile, \(I_i(\rho )\approx I_0(1-2\rho ^{2}/W_0^{2})\), and obtain an elastic force with the radial spring constant in terms of the particle and beam parameters:
with a corresponding radial harmonic potential \(U(\rho )=\kappa _{\rho }\rho ^{2}/2\) (Fig. 1b).
The second term in the Eq. 7 is the scattering force:
This term is responsible for the radiation pressure and is non-conservative because momentum transfer from the field to the dipoles of the particle is a result of both scattering and absorption processes. This force is directed along the propagation direction of the laser beam (Ashkin 1970).
The last term in the Eq. 7 is the so-called spin-curl force (Albaladejo et al. 2009):
This term is non-conservative and is due to the polarization gradients in the electromagnetic field. It usually does not play a major role in optical trapping because it is very small compared to the other contributions. However, it may play a more significant role when considering optical trapping with optical beams of higher order with inhomogeneous polarization patterns such as cylindrical vector beams (Donato et al. 2012; Skelton et al. 2013) or superpositions of circularly polarized Hermite–Gauss beams (Marqués 2014).
2.3 Electromagnetic theory
In the intermediate regime the particle size is comparable with the wavelength (\(k a\simeq 1\)), and both dipole approximation and ray optics are not applicable. Thus, a complete wave-optical theory and modeling of the particle–light interaction to calculate the trapping forces is necessary. Because the interaction between light and matter is governed by conservation laws, it is possible to derive the force and torque contributions by conservation of linear and angular momentum, respectively. In electromagnetic scattering theory, using the conservation of linear momentum, the time-averaged optical force exerted by monochromatic light on a particle is given by (Mishchenko 2001; Nieminen et al. 2001; Saija et al. 2005; Borghese et al. 2007):
where the integration is carried out over a surface \(S\) surrounding the scattering particle, \(\widehat{{\mathbf{n }}}\) is the surface outer normal unit vector, and \(\langle T_{\rm M} \rangle \) is the averaged Maxwell stress tensor which describes the mechanical interaction of light with matter:
where \(\otimes \) is the dyadic product, \({\mathbf I} \) is the dyadic unit, and the fields, \({\mathbf E} ={\mathbf E} _{\it i}+{\mathbf E} _{\it s}\) and \({\mathbf B} ={\mathbf B} _{\it i}+{\mathbf B} _{\it s}\), are the total electric and magnetic fields superposition of the incident (\({\mathbf E} _{\it i},{\mathbf B} _{\it i}\)) and scattered (\({\mathbf E} _{\it s},{\mathbf B} _{\it s}\)) fields.
In a similar way, considering the conservation of the angular momentum, the time-averaged radiation torque is expressed as (Borghese et al. 2006):
The expressions for the radiative force and torque can be significantly simplified in the far-field region (\(r\rightarrow \infty \)). Here, the integration can be performed over a spherical surface of radius \(r\) large enough so that vanishing terms at infinity are neglected in the integration, and the radiation force and torque are:
where the integration is now carried out over the full solid angle (\(\Omega =4\pi \)). These expressions are the starting point for the electromagnetic calculations of optical forces and torque in optical trapping in the intermediate regime or for non-homogeneous and non-spherical scatterers. The key point is to solve the scattering problem by calculating the scattered fields and consequently the Maxwell stress tensor. However, the calculations of forces and torques in this regime are usually a complicate procedure (Borghese et al. 2007). Thus, various algorithms have been developed to handle this problem (Simpson 2014; Nieminen et al. 2014). Among the different approaches, a successful method is based on the calculation of the transition matrix (T-matrix) (Borghese et al. 2007). This is particularly useful and computationally effective because it is possible to exploit the rotation and translation properties of the T-matrix to obtain at once optical forces and torques for different positions and orientations of the trapped particles (Borghese et al. 2006, 2007, 2008; Nieminen et al. 2001, 2011; Saija et al. 2005, 2009; Simpson and Hanna 2006, 2007).
In T-matrix methods, the incident, scattered, and internal fields are expanded in terms of vector spherical harmonics. The relation between the expansion amplitudes of the scattered and of the incident fields defines the T-matrix. Thus, the scattering problem is reduced to the calculations of these coefficients through, e.g., the imposition of the boundary conditions across the particles surface or by point matching numerically the fields at the surface (Borghese et al. 2007). Because the T-matrix works best with objects highly symmetric in shape and composition, one can calculate forces and torques on non-spherical objects by modeling them as clusters of small spheres (Borghese et al. 2007, 2008).
3 Optical tweezers setup and calibration

Schematic diagram of our optical tweezers setup. A diode laser at wavelength 830 nm is collimated by an aspheric lens and expanded through a 1:4 telescope. The beam is directed by a dichroic mirror to overfill the back aperture of a high NA (1.3) objective. Samples are placed in a small microfluidic chamber. Scattered and unscattered light from the trapped samples is collected by the condenser lens. The back focal plane of the condenser is then imaged onto a quadrant photodiode for tracking the particle position fluctuations. White light illumination through the system provides sample imaging on a CCD camera
Our optical tweezers setup is mounted around an inverted microscope (where the trapping laser beam is directed upwards). All components (Fig. 2) are mounted on a vibration isolation table to reduce the mechanical vibrations. Light from a diode laser (Thorlabs M9-830-0150), emitting at wavelength 830 nm and with maximum output power of 150 mW (of which about 26 mW reach the sample), is collimated through an aspheric collimation lens. The laser diode is actively stabilized in temperature and current to minimize wavelength fluctuations. The near-infrared wavelength falls close to a local minimum of water absorption spectrum minimizing heating effects and representing an important point for non-destructive manipulation of biological samples. The linearly polarized collimated beam exhibits a typical astigmatic profile which is converted in a near circular shape using anamorphic prisms. The polarization can be controlled using a half waveplate (or quarter waveplate if circular polarization is needed) in the beam path. The laser beam is expanded by means of a 1:4 telescope and sent through a dichroic mirror to overfill the back aperture of an oil immersion objective. Overfilling creates the maximal optical field gradient in the focal spot for a more efficient trapping. The objective lens (Olympus UplanFLN) has a high numerical aperture (NA = 1.3) to tightly focus the beam and create an intensity gradient to overcome the scattering force for stable optical trapping in 3D. Scattered and unscattered light from the trapped particle is collected by the microscope condenser and imaged onto a quadrant photodiode (QPD). This creates an interference pattern sensitive to the position of the trapped particle so that, for small displacements, the output signals of the QPD are proportional to the particle positional fluctuations. Finally, visible light from a white light source illuminates the sample which is imaged on a CCD camera for videomicroscopy.
3.1 Force calibration
A key element in force sensing with optical tweezers is Brownian motion. In fact, performing statistical analysis of an optically trapped particle’s thermal fluctuations enables force measurements. During optical trapping experiments, the particle’s displacements can be measured by the QPD or by videomicroscopy (Crocker and Grier 1996). In both cases, the recorded signals are proportional, by a calibration constant, to the particle displacements. Microscopic beads (polystyrene beads or silica beads) are often used either alone or attached to objects of interest such as bacterial cells and viruses as “handles” to apply calibrated forces (Fazal and Block 2011). Calibration and force measurements have also been recently achieved with non-spherical objects such as carbon nanotubes, silicon nanowires, and graphene flakes (Maragò et al. 2008, 2010b; Irrera et al. 2011).

Experimental data and data analysis for an optically trapped 2 μm latex bead. a \(x\)-component of the tracking signal from a QPD. b Autocorrelation function of the QPD signal. c Power spectral density. d Mean square displacement of the QPD signal. By fitting (solid lines) the ACF, PS, or MSD curves it is possible to get the calibration factor, \(\beta _x\), of the optical trap and its stiffness, \(\kappa _x\). Known the calibration factor, it is possible to convert the voltage signal (a) in nanometers
An example of a tracking signal arising from thermal motion of an optically trapped dielectric particle is shown in Fig. 3a. Within a narrow range around the trap, the voltages \(V_{x}\), \(V_{y}\), and \(V_{z}\) from the QPD are linearly related to the distance of the bead from the trap center along each axis. Since for small displacements, the trapped particle experiences a Hookean restoring force (\(F_x = -\kappa _x x\)), it is possible to use a Langevin equation to describe the thermal dynamics of the system. Different methods are used to calibrate the spring constants of the optical trap. Here, we briefly discuss only the ones that are most commonly used: correlation function analysis (Bar-Ziv et al. 1997), power spectrum (Berg-Sorensen and Flyvbjerg 2004; Buosciolo et al. 2004), and mean square displacement (Henderson et al. 2001).
The starting point of a calibration procedure is the Langevin equation (Coffey et al. 2004) for a particle in a confining harmonic potential with spring constant \(\kappa _x\), immersed in a fluid medium with viscosity \(\eta \), and subject to a random fluctuating force \(F_x (t)\):
where \(\gamma \) is the hydrodynamic viscous coefficient related to the medium viscosity, particle size and shape. In the low Reynold’s number limit, which is applicable to microparticles suspended in water, the system is overdamped and the first inertial term on the left-hand side of Eq. 18 can be neglected. Thus, the particle positional fluctuations are well described by the overdamped equation (Maragò et al. 2010a):
where \(\xi (t)=\frac{F(t)}{\gamma }\) has zero mean value, \(\langle \xi (t)\rangle = 0\), \(\delta \)-like time correlations and a white noise power spectrum:
where \(D=k_{B} T/\gamma \) is the diffusion coefficient.
Considering the generic expression of the autocorrelation function (ACF), \(C_{xx} (\tau ) = \langle x(t) x(t+\tau ) \rangle \), the overdamped Langevin equation yields a differential equation for the ACF of the position fluctuations:
that has a straightforward exponential solution
The autocorrelation of the particle position fluctuations exponentially decays with a characteristic time that depends on the trap spring constant \(\kappa _x\) and on the hydrodynamic drag coefficient \(\gamma \) (Bar-Ziv et al. 1997). Since the QPD produces a voltage signal \(V_{x}(t) = \beta _x x(t)\), where \(\beta _x\) is a position calibration factor, the signal autocorrelation function can be expressed as:
Moreover, from the equipartition theorem we have that \(C^{{V}}_{xx}(0)=\beta _x^{{2}}C_{xx}(0)=\beta _x^{{2}} k_{B}T/\kappa _x\), and finally the calibration factor is:
Thus, by fitting the ACF of the QPD tracking signals (Fig. 3b), it is possible to obtain both the optical tweezers spring constants and the calibration factors.
Another calibration method is based on the power spectrum (PS) analysis. The Fourier transform of the Langevin equation (Eq. 19) is:
where we defined \(\omega _x=\kappa _x/\gamma \) and solve for:
The corresponding power spectral density has a Lorentzian shape (Fig. 3c):
with a half-width that is the relaxation frequency of the trap, \(\omega _x\). At zero frequency the PS presents a value of \(2D/\omega ^{2}_x\), related to the force constants and thermal diffusion. By fitting the power spectrum of the signal (Fig. 3c), it is possible to obtain the relaxation frequency and hence the trap spring constant \(\kappa _x\). Also in this case, the power spectrum of the signal from a QPD is proportional to the power spectrum of the particle’s fluctuations:
Setting \(\omega =0\) we can obtain the calibration factor \(\beta _x\):
The last calibration method is based on the analysis of the mean square displacement (MSD). This quantifies how much a trapped particle fluctuates from its initial position in a time interval \(\tau \) (Henderson et al. 2001):
For \(\tau =0\) it is clear that \({\rm{MSD}}(\tau )=0\), \({\rm{MSD}}(\tau )\) presents a transition from a linear growth corresponding to a free diffusion behavior at low short timescale (\(\tau \ll \omega _x^{{-1}}\)) to a plateau value of \(2k_BT/\kappa _x\) for \(\tau \gg \omega _x^{{-1}}\) (Fig. 3d), due to the particle confinement at long timescales. The MSD of the QPD signals is proportional to that of the particle’s displacements:
Combining Eqs. 30 and 31, and for \(\tau \rightarrow \infty ,\) we obtain that:
and finally the calibration factor:
3.2 Comparison of different calibration methods

Comparison of different calibration methods. a ACF signal amplitudes. b Mean force constants \(\kappa \). c Mean calibration factors \(\beta \). d Aspect ratio of the optical trap
Although in theory the calibration methods described above are equivalent, they rely on different data processing and can yield different optical force calibration with different uncertainties. For example Seol et al. (2006) used the comparison between different calibration methods to reveal heating effects when trapping plasmonic particles. Thus, it is vital to check the consistency for the standard microscopic samples typically used in optical tweezers experiments. This ensures the reliability of both the experimental apparatus and data analysis when dealing with more complex measurements on samples such as nanostructures or non-spherical particles.
We applied the ACF, PS, and MSD calibration methods to a set of tracking signals obtained by optical trapping standard 2 μm diameter latex beads. Trap stiffnesses, \(\kappa \), and calibration factors, \(\beta \), have been obtained from the different methods and compared in Fig. 4. Four different parameters are compared: the ACF signal amplitude (Fig. 4a), the mean \(\kappa \) values (Fig. 4b), the mean \(\beta \) values (Fig. 4c), and the trap aspect ratio (Fig. 4d).
The first parameter compares the ACF amplitude at \(\tau =0\):
with the ones obtained from the PS and MSD amplitudes. In fact, in the case of the PS method, from Eq. 28 at \(\omega =0\) we have that:
and hence the PS amplitude is:
While in the case of the MSD method we obtain the MSD amplitude simply as
Thus, we plot in Fig. 4a the values of \(A_{\rm ACF}\) as obtained from the different calibration methods. A very good consistency is obtained showing that the amplitudes, related to the diffusion constant, can be calibrated reliably in our setup with the different calibration methods.
Figure 4b, c shows the direct comparison of the spring constants, \(\kappa \), and calibration factor, \(\beta \). These show larger uncertainties reflecting the fluctuations in the set of experimental measurements. In 4b the adjusted R squared (\(Adj R^{2}\)) of the fits to the data has also been reported in each column. The \(Adj R^{2}\) indicates how well data fit a statistical model. Within the uncertainty of the measurements, also the data for stiffness and calibration factor have a good degree of consistency.
Another important parameter shown in Fig. 4d is the trap aspect ratio, related with the shape of the trapping potential reported, and defined as:
This parameter appears to be very robust against data fluctuations and fitting procedures with a little uncertainty.
From this analysis, it appears that the three calibration methods are quite consistent and their results are comparable within the error bars. However, we notice that \(Adj R^{2}\) values in Fig. 4b are better for time domain methods and worse for PS analysis. In particular, ACFs experimental data are fitted better than PS and MSD data. For this reason, although all methods provide similar results, we adopt ACF analysis as our standard calibration method. Moreover, ACF analysis is extremely useful to deconvolve more complex time domain dynamics of the trapped particle from its tracking signals such as non-conservative effects (Pesce et al. 2009) or rotations (Jones et al. 2009).
4 Plasmon-enhanced optical trapping of metal nanoparticles

a Comparison of trapping efficiencies for gold and latex nanoparticles with the same radius of 35 nm at different trapping wavelengths. Calculation is performed using electromagnetic theory. b Corresponding trapping potential showing tenfold enhancement of trapping depth for gold with respect to latex at 1064 nm. c Experimental ACF for an optically trapped gold nanoparticle with 45 nm radius at 830 nm wavelength. d Reconstruction of the Brownian fluctuations in the optical trap for the gold nanoparticle as in c
The extension of optical trapping to nanoparticles is not straightforward (Maragò et al. 2013). As shown in Sect. 2, when the particle size is much smaller than the trapping wavelength, the optical trapping force is proportional to the real part of the polarizability that scales with the volume of the trapped particle. Thus, thermal fluctuations can easily overwhelm optical trapping. On the other hand, metal nanoparticles are resonant systems that exhibit strongly localized plasmonic resonances with very high saturation intensities (Maier 2007). It is then possible to exploit this resonant response and trap metal particles in standard optical tweezers setup when light is tuned to the long wavelength side (red detuned) from the resonance (Svoboda and Block 1994b; Hansen et al. 2005; Bosanac et al. 2008). The resonant nature of plasmon-enhanced forces yields a frequency dependence of the optomechanical response of metal nanoparticles that enable trapping in low-intensity regions (Dienerowitz et al. 2008) with blue detuned light and frequency-dependent sorting by size (Ploschner et al. 2012), further enhancing their applications in optofluidics. Quasi-resonant illumination can also yield heating effects in the optical trap because of absorption (Seol et al. 2006; Kyrsting et al. 2011). Thus, for accurate force sensing it is advisable to use low power at the sample (few milliwatts) (Messina et al. 2011b).
From the theoretical point of view plasmon-enhanced optical forces on metal nanoparticles can be understood within the dipole approximation (Sect. 2). The polarizability of a small metal sphere can be evaluated analytically using Eq. 6 and considering the frequency dependence of the complex particle relative permittivity, \(\epsilon _{\rm p} (\omega )\):
where \(\epsilon \) is the permittivity of the surrounding medium (\(\epsilon =\epsilon _0 n^{2}\)). A resonance occurs when the real part of the particle dielectric constant is negative and its modulus approaches \(2\epsilon \). The increased polarizability of metal nanoparticles yields enhanced optical trapping forces with respect to dielectric particles. In the infrared, spherical metal nanoparticles have polarizabilities that are several times greater than that of a polymer or glass nanoparticle, enabling a much stronger optical gradient force. Note that for small metal nanoparticles, the increased polarizability in the infrared is away from the plasmon resonance and is mainly due to the contribution of unbound electrons (Svoboda and Block 1994b).
Figure 5a, b shows a comparison of calculated optical forces and trapping potentials for gold nanoparticles and latex spheres of 35 nm radius. The calculations have been obtained using full electromagnetic theory (T-matrix method) and considering the full vectorial nature of the tightly focused Gaussian beam used for optical trapping (Borghese et al. 2007; Saija et al. 2009). A tenfold enhancement of trapping depth in the optical potential is calculated for gold with respect to latex.
To further investigate the beneficial effect of the plasmon-enhanced optical response on optical trapping and its size scaling behavior, we also performed experiments on gold spherical nanoparticles. We used commercial monodisperse samples (Nanopartz) with radii in the range 15–45 nm. A few tens of microliters were loaded in a microfluidic chamber and placed in the optical tweezers setup described in Sect. 3. The force constants for the different nanoparticles were measured by ACF analysis (Fig. 5c) following the calibration protocols described in Sect. 3.1. This permits the full calibration of optical forces and the reconstruction of the Brownian motion of the nanoparticles in the trap (Fig. 5d).
Figure 6 shows the size scaling behavior of the spring constants normalized to the trapping power. At a trapping wavelength of 830 nm and for our size range, the volumetric scaling expected by a dipole approximation is well reproduced. The experimental values agree very well with calculations based on T-matrix codes. The differences in the three spatial directions, \(x,y,z\), are accounted by the linear polarization of the tightly focused laser beam that breaks the cylindrical symmetry of the trap (Borghese et al. 2007; Saija et al. 2009). Instead, the volumetric scaling at shorter wavelengths breaks for large particles where the red-shift of the plasmon resonance occurs. Thus, the plasmon resonance and the trapping wavelength get closer and the particle is more subject to the destabilizing effect of radiation pressure. As an example, Fig. 6b shows calculations of spring constants for optical tweezers at 700 nm, in this case the scaling fails when the particle radius is larger than 35 nm.

a Size scaling behavior of the spring constant for gold nanoparticles in an optical tweezers. Data are the measured spring constants in a trap at 830 nm wavelength, lines are the values calculated with a full electromagnetic theory. The thick solid line is a guide-to-the-eye representing a scaling with particle volume (\(\propto a^{3}\)). b Calculated size scaling of spring constants at 700 nm trapping wavelength
5 Chiral optical tweezers
The development of non-contact techniques to enable the controlled orientation and rotation of micro- and nanoparticles is of crucial importance for their implementation as active elements in next-generation micro- and nanomachines for optofluidics (Palima and Glückstad 2013). As discussed in Sect. 2, light can be used to transfer angular momentum to a particle and the induced torque may result in alignment or continuous spin. Several methods have been used to induce optically controlled rotations and alignment in optical tweezers: anisotropic light scattering from the particle shape (Galajda and Ormos 2001; Jones et al. 2009) or transfer of angular momentum from laser beams carrying spin and/or orbital angular momentum to absorptive (Friese et al. 1996) or birefringent (Friese et al. 1998) particles. In general, in optical manipulation experiments the radiation forces and torques are decoupled. However, recent experiments involving chiral particles obtained from soft chiral materials have demonstrated the occurrence of polarization-dependent radiation forces, opening a route for chiral optomechanics and optofluidics (Cipparrone et al. 2011; Hernández et al. 2013; Donato et al. 2014; Tkachenko and Brasselet 2014).
The interaction of chiral light with chiral objects gives rise to interesting effects such as the selective circular reflection observed in chiral mirrors, which can be used to study the transfer of angular momentum from light beams to matter (Donato et al. 2014). Chiral mirrors have been developed employing chiral materials such as cholesteric liquid crystals (CLC). CLC mirrors work differently from standard ones. In fact, depending on the left- or right-handed chiral structure of the CLC material, they display circular Bragg reflection, i.e., circularly polarized light having the same handedness of the chiral arrangement (parallel spin) and wavelength inside a specific photonic band gap, is reflected maintaining unchanged its spin state, while light having opposite handedness (antiparallel spin) is transmitted unaffected. This feature allows the transfer of angular momentum upon reflection from the chiral mirror, which would be forbidden if standard mirrors were used (Donato et al. 2014).
Optical trapping experiments have been conducted using spherical polymeric particles obtained from CLC droplet emulsions in water (Donato et al. 2014). After an UV treatment, solid particles with internal spherulite-like arrangement of supramolecular helices originating from the center have been obtained (Cipparrone et al. 2011). The helicoidal arrangement of the CLC molecules leads to Bragg reflection for light propagating along the helical axis and wavelength within the stop band. Reflectance depends on the microparticles radius, \(R_0\), reaching unitary value after few helices. Light at wavelengths fulfilling the selective reflection condition is used, and optical forces and torques are measured by back focal plane interferometry on a QPD. The particle tracking signals are then processed by ACF analysis (Sect. 3). The ACFs give a full account of the particle translational and rotational motion in the optical trap. In fact, thermal positional fluctuations yield a single exponential decay in the ACFs, while rotations about the optical \(z\)-axis appear as a cosinusoidal modulation in the transverse ACFs (Jones et al. 2009). Thus, for rotating particles, the ACFs give a direct measurement of the particle rotational frequency, \(\Omega \), which is used to evaluate the averaged optical torque transferred to the trapped particle. Since \(\Omega \) is set by the equilibrium between optical and rotational drag torques, the optical torque modulus for left-handed polarization, \(\Gamma ^{{+}}_{\rm rad}\), is equal to the rotational drag torque on a sphere rotating in a fluid at low Reynolds number, \(\Gamma _{\rm drag}=8\pi \eta R_{0}^{{3}}\Omega \).
The dynamics of these chiral microparticles shows that for right-handed light they are always trapped independently of their size and do not rotate. Instead, when the polarization state of the trapping light is switched to left-handed, a size-dependent behavior occurs. Depending on the particle size, optical forces can be attractive or repulsive depending on the light spin state. Moreover, an optical torque originates from the chirality-mediated transfer of spin angular momentum. The ratio \(\kappa ^{+}/\kappa ^{-}\) of the transverse trapping constants under left- and right-handed circular polarization gives a direct evidence of the coupling between spin and optical trapping forces. For small particles, the chiral structure is just formed or even absent. Thus, the reflectivity is negligible and we expect the trapping forces to be independent on the light spin state, i.e. \(\kappa ^{+}\sim \kappa ^{-}\). On the contrary, when the particle radius grows so that enough chiral layers are formed, photonic effects become relevant and the net optical trapping force exerted by left-handed beam is lower than that exerted by light having opposite spin. In fact, in this case a portion of the impinging power is selectively reflected increasing the detrimental effect of the radiation pressure on the trapping itself. Thus, the force constant degeneracy is lifted and \(\kappa ^{+}<\kappa ^{-}\). In the limit of a perfect chiral photonic structure, the total optical force of left-handed light becomes negative because only the radiation pressure due to the reflected light is present. Trapping of such particles with left-handed light is not possible. Thus, transmitted light transfers only linear momentum, and angular momentum transfer occurs by the light reflected from the left-chiral microparticles. This, in turn, causes a torque on the particle itself, yielding a stable rotation. The effect can occur only if the total linear momentum exchanged preserves the trapping action of the light beam.
6 Raman tweezers and spectroscopy for biosensing

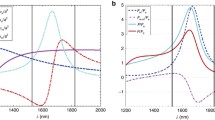
a Simplified sketch of a Raman tweezers. Optical trapping and Raman spectroscopy are performed with the same laser source (785 nm). The Raman signal from trapped particles is collected through the same objective used for trapping. b SERS spectrum from trapped gold nanoaggregates with adsorbed biomolecules. The asterisks highlight the enhanced pyridine vibrational peaks, while the Bovine Serum Albumine (BSA) Raman modes are indicated in red. SERS tweezers represent a promising tool for the development of biosensors capable to detect and investigate biomaterials in their natural habitat. Adapted from Ref. Messina et al. (2011a)
A problem in studying biological systems involves the possible interference of the sample preparation with physiological processes of the system itself because most cells can live, grow, and reproduce in liquid media. These processes involve continuous changes in their biochemical composition, potentially detectable by Raman spectroscopy. This is based on the detection of inelastically scattered light from the sample upon illumination by a laser beam. The energy shift provides information on the vibrational and rotational energies of molecular bonds and on chemical species in which those bonds are present. Raman spectra can be considered, therefore, as the chemical fingerprints of molecules and of their interaction with the environment. However, this spectroscopic technique is often limited by the inability to manipulate, and therefore, analyze samples without fixing them to a substrate. This limitation can be overcome by coupling spectroscopy setup with an optical tweezers system realizing a Raman tweezers setup. Raman tweezers allow one to study optically trapped micro/nanoparticles by probing in situ their electronic, vibrational, plasmonic, and non-linear properties (Maragò et al. 2010b, 2013; Tan et al. 2004; Prikulis et al. 2004; Ohlinger et al. 2011; Reece et al. 2009; Wang et al. 2011, 2013). They can be used to trap functionalized nanostructures, aggregates, and composites, to characterize their chemical–physical properties and their interaction with the environment.
In a typical Raman tweezers setup (Fig. 7a), the same beam to trap the particle and excite the sample for Raman analysis is often employed. Laser beams at different wavelengths can be used, depending on the specific applications. Visible lasers (458, 488, 514.5, 633 nm) are well suited for material science applications and for excitation of nanostructures (Reece et al. 2009; Maragò et al. 2010b; Wang et al. 2011), while NIR lasers (785, 830 nm) are better for biological samples because their natural fluorescence is not excited and to minimize photodamage of biomaterials (Xie et al. 2002). The laser beam, after passing an interference filter for plasma line removal, is expanded to overfill the entrance pupil of the objective. A notch filter, tuned at the laser emission wavelength, is used to first reflect back the laser beam toward the high NA microscope objective, and then, to cut the elastic scattering component of the backscattered radiation which is collected by the same objective. The sample is illuminated by a lamp or a diode whose light is focused on the sample surface by a condenser. Visual inspection of the trapped particle is accomplished through a video camera. The inelastically scattered radiation, after passing a confocal hole, is focused on the slits of a spectrometer and then detected by a CCD camera or a single-photon counting silicon avalanche photodiode. A more versatile set-up involves two optical beams: one to trap the particles and one to excite it. This configuration is used to carry out trapping and photoluminescence spectroscopy at the same time. For example, structural properties of single nanowires in liquid can be investigated by combining NIR optical tweezers with visible photoluminescence excitation (Reece et al. 2009). The single-beam configuration is simpler and more stable, although the two-beam arrangement offers more versatility to trap, manipulate, and excite specific zones of the object, by displacing the trapping and excitation beams independently (Wang et al. 2013).
Many biological systems, including red blood cells, bacterial spores, and liposomal membrane, have been studied with Raman Tweezers (Ajito and Torimitsu 2002; Lankers et al. 1997; Xie et al. 2002; Wood et al. 2001; Cojoc et al. 2005). In this contest, they are useful for the study of a specific disease known as thalassemia, by monitoring of the oxygenation capability of \(\beta \)-thalassemic red blood cells (De Luca et al. 2007, 2008) or in general to discriminate healthy from virally infected cells (Chan et al. 2006; Deng et al. 2005; Hamden et al. 2005). Biomolecules, such as proteins or nucleic acids, find in liquid their natural, functional environment. The rapid, ultra-sensitive, label-free detection of pathology biomarkers in body fluids is a field in which plasmonic nanosensors find a large number of applications (Willets and Van Duyne 2007). To increase the inherent low sensitivity of Raman spectroscopy, the amplification of electromagnetic fields by metal nanoparticles has been used realizing SERS Tweezers. Raman signals have been amplified by several order of magnitude. SERS from isolated metal nanostructures is usually much weaker compared to what is observed on aggregates due to the strong field enhancement occurring in the gap regions (hot spots) between adjacent nano-objects. Moreover, SERS tweezers couple high molecular sensitivity with the contactless, three-dimensional capability of operation in liquids. SERS-active probes can be highly specific because functionalized probes allow selective interaction with sample specific sites. Thus, they represent a promising tool for the development of next-generation biosensors capable of detecting biomolecules and investigating biological samples in their natural environment. The plasmonic nature of metal nanoaggregates can also enhance the optical forces, so that an increased trapping efficiency depends on the relative position between the trapping wavelength and the long-wavelength plasmon resonance arising from aggregation (Messina et al. 2011b, 2012). Gold nanoparticles produced by pulsed laser ablation in liquid, aggregated with different concentrations of pyridine and optically trapped in a single beam (785 nm), have been used to detect proteins adsorbed on their surface (Messina et al. 2011a). In this way, it is possible to understand how the field enhancement properties of these nanostructures enable SERS spectroscopy of molecules adsorbed on aggregates optically trapped in the near-infrared region. In Fig. 7b is shown the SERS spectrum of the molecules adsorbed on the surface of optically trapped metal nanoaggregates. The enhanced pyridine vibrational peaks and BSA Raman modes are clearly identified (Messina et al. 2011a).
The combination of optical tweezers and optical injection of nanoparticles inside living cells has recently been used to detect a single DNA molecule bonded to two optically trapped dielectric beads in a solution with nanosized silver colloid particles, using two optically trapped dielectric beads as anchors (Rao et al. 2010). The controlled creation of highly efficient hot spots in liquid is a challenge in which optical forces can play an important role by promoting the accumulation of metal nanoparticles on a surface, by radiation pressure, or their aggregation in the focus of a laser beam, by optical trapping. These components can promote the formation of SERS-active agglomerates capable to enhance the Raman scattering of biomolecules by several orders of magnitude, thus allowing their detection at very low concentrations.
7 Conclusions
Optical tweezers are instruments that are perfectly suited for trapping and probing soft and biomaterials. The ability to use light for contactless manipulation enables to investigate soft and biosamples in their fluidic environment. Optical forces are a key ingredient in optofluidics and lab-on-chip devices opening novel routes to the creation and exploitation of micro- and nanomachines driven by light. The integration of optical tweezers with spectroscopies has paved the way to novel capabilities for the ultra-sensitive characterization of materials at the nanoscale.
References
Ajito K, Torimitsu K (2002) Laser trapping and Raman spectroscopy of single cellular organelles in the nanometric range. Lab Chip 2:11–14
Albaladejo S, Marqués MI, Laroche M, Sáenz JJ (2009) Scattering forces from the curl of the spin angular momentum of a light field. Phys Rev Lett 102:113602
Ashkin A (1970) Acceleration and trapping of particles by radiation pressure. Phys Rev Lett 24:156
Ashkin A (1992) Forces of a single-beam gradient laser trap on a dielectric sphere in the ray optics regime. Biophys J 61:569–582
Ashkin A, Dziedzic JM (1987) Optical trapping and manipulation of viruses and bacteria. Science 235:1517–1520
Ashkin A, Dziedzic JM, Yamane T (1987) Optical trapping and manipulation of single cells using infrared laser beams. Nature 330:769–771
Ashkin A, Dziedzic JM, Bjorkholm JE, Chu S (1986) Observation of a single-beam gradient optical trap for dielectric particles. Opt Lett 11:288
Bar-Ziv R, Meller A, Tlusty T, Moses E, Stavans J, Safran SA (1997) Localized dynamic light scattering: probing single particle dynamics at the nanoscale. Phys Rev Lett 78:154
Berg-Sorensen K, Flyvbjerg H (2004) Power spectrum analysis for optical tweezers. Rev Sci Instrum 75:594
Borghese F, Denti P, Saija R (2007) Scattering from model nonspherical particles. Springer, Berlin
Borghese F, Denti P, Saija R, Iatì MA (2006) Radiation torque on nonspherical particles in the transition matrix formalism. Opt Express 14:9508–9521
Borghese F, Denti P, Saija R, Iatì MA (2007) Optical trapping of nonspherical particles in the T-matrix formalism. Opt Express 15:11984–11998
Borghese F, Denti P, Saija R, Iatì MA, Maragó OM (2008) Radiation torque and force on optically trapped linear nanostructures. Phys Rev Lett 100:163903
Bosanac L, Aabo T, Bendix PM, Oddershede LB (2008) Efficient optical trapping and visualization of silver nanoparticles. Nano Letters 8(5):1486–1491
Buosciolo A, Pesce G, Sasso A (2004) New calibration method for position detector for simultaneous measurements of force constants and local viscosity in optical tweezers. Opt Commun 230:357–368
Callegari A, Mijalkov M, Gököz AB, Volpe G (2014) Computational toolbox for optical tweezers in geometrical optics. arXiv:1402.5439
Chan JW, Taylor DS, Zwerdling T, Lane SM, Ihara K, Huser T (2006) Micro-Raman spectroscopy detects individual neoplastic and normal hematopoietic cells. Biophys J 90:648–656
Chaumet PC, Nieto-Vesperinas M (2000) Time-averaged total force on a dipolar sphere in an electromagnetic field. Opt Lett 25:1065–1067
Cipparrone G, Mazzulla A, Pane A, Hernandez RJ, Bartolino R (2011) Chiral self-assembled solid microspheres: a novel multifunctional microphotonic device. Adv Mater 23:5773–5778
Coffey WT, Kalmykov YT, Waldron JT (2004) The Langevin equation. World Scientific, Singapore
Cojoc D, Ferrari E, Garbin V, Di Fabrizio E (2005) Multiple optical tweezers for micro Raman spectroscopy. In: Proceedings of SPIE 5930, optical trapping and optical micromanipulation II, 2005, p 59300
Crocker JC, Grier DG (1996) Methods of digital video microscopy for colloidal studies. J Colloid Interface Sci 179:298–310
De Luca AC, Rusciano G, Ciancia R, Martinelli V, Pesce G, Rotoli B, Sasso A (2007) Resonance raman spectroscopy and mechanics of single red blood cell manipulated by optical tweezers. Haematologica 92(S3):174
De Luca AC, Rusciano G, Ciancia R, Martinelli V, Pesce G, Rotoli B, Selvaggi L, Sasso A (2008) Spectroscopical and mechanical characterization of normal and thalassemic red blood cells by raman tweezers. Opt Express 16:7943–7957
Deng JL, Wei Q, Zhang MH, Wang YZ, Li YQ (2005) Study of the effect of alcohol on single human red blood cells using near-infrared laser tweezers raman spectroscopy. J Raman Spectrosc 36:257–261
Dholakia K, Čižmár T (2011) Shaping the future of manipulation. Nat Photonics 5:335–342
Dienerowitz M, Mazilu M, Reece PJ, Krauss TF, Dholakia K (2008) Optical vortex trap for resonant confinement of metal nanoparticles. Opt Express 16:4991–4999
Donato MG, Vasi S, Sayed R, Jones PH, Bonaccorso F, Ferrari AC, Gucciardi PG, Maragò OM (2012) Optical trapping of nanotubes with cylindrical vector beams. Optics Lett 37:3381–3383
Donato MG, Hernandez J, Mazzulla A, Provenzano C, Saija R, Sayed R, Vasi S, Magazzù A, Pagliusi P, Bartolino R, Gucciardi PG, Maragó OM, Cipparrone G (2014) Polarization-dependent optomechanics mediated by chiral microresonators. Nat Commun 5:3656
Draine BT (1988) The discrete-dipole approximation and its application to interstellar graphite grains. Astrophys J 333(1):848–872
Fazal FM, Block SM (2011) Optical tweezers study life under tension. Nat Photonics 5:318–321
Florin E-L, Pralle A, Horber JKH, Stelzer EHK (1997) Photonic force microscope based on optical tweezers and two-photon excitation for biological applications. J Struct Biol 119:202–211
Friese MEJ, Enger J, Rubinsztein-Dunlop H, Heckenberg NR (1996) Optical angular-momentum transfer to trapped absorbing particles. Phys Rev A 54:1593
Friese MEJ, Nieminen TA, Heckenberg NR, Rubinsztein-Dunlop H (1998) Optical alignment and spinning of laser-trapped microscopic particles. Nature 394:348–350
Galajda P, Ormos P (2001) Complex micromachines produced and driven by light. Appl Phys Lett 78:249–251
Ghislain LP, Webb WW (1993) Scanning-force microscope based on an optical trap. Opt Lett 18:1678–1680
Gordon JP (1973) Radiation forces and momenta in dielectric media. Phys Rev A 8:14–21
Hamden KE, Bryan BA, Ford PW, Xie C, Li Y-Q, Akula SM (2005) Spectroscopic analysis of Kaposi’s sarcoma-associated herpesvirus infected cells by raman tweezers. J Virol Methods 129:145–151
Hansen PM, Bhatia VK, Harrit N, Oddershede L (2005) Expanding the optical trapping range of gold nanoparticles. Nano Letters 5(10):1937–1942
Henderson S, Mitchell S, Bartlett P (2001) Position correlation microscopy: probing single particle dynamics in colloidal suspensions. Colloids Surf A: Physicochem Eng Aspects 190:81–88
Hernández RJ, Mazzulla A, Pane A, Volke-Sepúlveda K, Cipparrone G (2013) Attractive–repulsive dynamics on light-responsive chiral microparticles induced by polarized tweezers. Lab Chip 13:459–467
Irrera A, Artoni P, Saija R, Gucciardi PG, Iatì MA, Borghese F, Denti P, Iacona F, Priolo F, Marago OM (2011) Size-scaling in optical trapping of silicon nanowires. Nano Letters 11:4879–4884
Jones PH, Marago OM, Stride EPJ (2007) Parametrization of trapping forces on microbubbles in scanning optical tweezers. J Opt A: Pure Appl Opt 9:278
Jones PH, Maragó OM, Volpe G (2015) Optical tweezers. Cambridge University Press, Cambridge
Jones PH, Palmisano F, Bonaccorso F, Gucciardi PG, Calogero G, Ferrari AC, Maragó OM (2009) Rotation detection in light-driven nanorotors. ACS Nano 3(10):3077–3084
Kyrsting A, Bendix PM, Stamou DG, Oddershede LB (2011) Heat profiling of three-dimensionally optically trapped gold nanoparticles using vesicle cargo release. Nano Letters 11:888–892
Lankers M, Popp J, Rössling G, Kiefer W (1997) Raman investigations on laser-trapped gas bubbles. Chem Phys Lett 277:331–334
Maier SA (2007) Plasmonics: fundamentals and applications: fundamentals and applications. Springer, Berlin
Maragò OM, Gucciardi PG, Jones PH (2010a) Photonic force microscopy: from femtonewton force sensing to ultra-sensitive spectroscopy. In: Scanning probe microscopy in nanoscience and nanotechnology. Springer, Berlin, pp 23–56
Maragò OM, Bonaccorso F, Saija R, Privitera G, Gucciardi PG, Iatì MA, Calogero G, Jones PH, Borghese F, Denti P, Nicolosi V, Ferrari AC (2010b) Brownian motion of graphene. ACS Nano 4:7515
Maragò OM, Jones PH, Bonaccorso F, Scardaci V, Gucciardi PG, Rozhin AG, Ferrari AC (2008) Femtonewton force sensing with optically trapped nanotubes. Nano Letters 8:3211–3216
Maragò OM, Jones PH, Gucciardi PG, Volpe G, Ferrari AC (2013) Optical trapping and manipulation of nanostructures. Nat Nanotechnol 8:807–819
Marqués MI (2014) Beam configuration proposal to verify that scattering forces come from the orbital part of the Poynting vector. Opt Lett 39:5122–5125
Messina E, Cavallaro E, Cacciola A, Saija R, Borghese F, Denti P, Fazio B, D’Andrea C, Gucciardi PG, Iati MA, Meneghetti M, Compagnini G, Amendola V, Maragò OM (2011a) Manipulation and Raman spectroscopy with optically trapped metal nanoparticles obtained by pulsed laser ablation in liquids. J Phys Chem C 115:5115–5122
Messina E, Cavallaro E, Cacciola A, Iatì MA, Gucciardi PG, Borghese F, Denti P, Saija R, Compagnini G, Meneghetti M, Amendola V, Maragò OM (2011b) Plasmon-enhanced optical trapping of gold nanoaggregates with selected optical properties. ACS Nano 5(2):905–913
Messina E, D’Urso L, Fazio E, Satriano C, Donato MG, D’Andrea C, Maragò OM, Gucciardi PG, Compagnini G, Neri F (2012) Tuning the structural and optical properties of gold/silver nano-alloys prepared by laser ablation in liquids for optical limiting, ultra-sensitive spectroscopy, and optical trapping. J Quant Spectrosc Radiat Transf 113:2490–2498
Mishchenko MI (2001) Radiation force caused by scattering, absorption, and emission of light by nonspherical particles. J Quant Spectrosc Radiat Transf 70:811–816
Neuman KC, Nagy A (2008) Single-molecule force spectroscopy: optical tweezers, magnetic tweezers and atomic force microscopy. Nat Methods 5:491–505
Nieminen TA, Rubinsztein-Dunlop H, Heckenberg NR (2001) Calculation and optical measurement of laser trapping forces on non-spherical particles. J Quant Spectrosc Radiat Trans 70:627–637
Nieminen TA, Loke VLY, Stilgoe AB, Heckenberg NR, Rubinsztein-Dunlop H (2011) T-matrix method for modelling optical tweezers. J Mod Opt 58:528–544
Nieminen TA, du Preez-Wilkinson N, Stilgoe AB, Loke VLY, Bui AAM, Rubinsztein-Dunlop H (2014) Optical tweezers: theory and modelling. J Quant Spectrosc Radiat Transf 146:59–80
Ohlinger A, Nedev S, Lutich AA, Feldmann J (2011) Optothermal escape of plasmonically coupled silver nanoparticles from a three-dimensional optical trap. Nano Letters 11:1770–1774
Olof SN, Grieve JA, Phillips DB, Rosenkranz H, Yallop ML, Miles MJ, Patil AJ, Mann S, Carberry DM (2012) Measuring nanoscale forces with living probes. Nano Letters 12:6018–6023
Padgett M, Bowman R (2011) Tweezers with a twist. Nat Photonics 5:343–348
Palima D, Glückstad J (2013) Gearing up for optical microrobotics: micromanipulation and actuation of synthetic microstructures by optical forces. Laser Photonics Rev 7:478–494
Pesce G, Volpe G, De Luca AC, Rusciano G, Volpe G (2009) Quantitative assessment of non-conservative radiation forces in an optical trap. Europhys Lett 86:38002
Petrov DV (2007) Raman spectroscopy of optically trapped particles. J Opt A Pure Appl Opt 9:139
Phillips DB, Grieve JA, Olof SN, Kocher SJ, Bowman R, Padgett MJ, Miles MJ, Carberry DM (2011) Surface imaging using holographic optical tweezers. Nanotechnology 22:285503
Phillips DB, Padgett MJ, Hanna S, Ho Y-LD, Carberry DM, Miles MJ, Simpson SH (2014) Shape-induced force fields in optical trapping. Nat Photonics 8:400–405
Ploschner M, Cizmar T, Mazilu M, Di Falco A, Dholakia K (2012) Bidirectional optical sorting of gold nanoparticles. Nano Letters 12:1923–1927
Pralle A, Prummer M, Florin E-L, Stelzer EHK, Horber JKH (1999) Three-dimensional high resolution particle tracking for optical tweezers by forward light scattering. Microsc Res Tech 44:378–386
Prikulis J, Svedberg F, Käll M, Enger J, Ramser K, Goksör M, Hanstorp D (2004) Optical spectroscopy of single trapped metal nanoparticles in solution. Nano Letters 4:115–118
Rao S, Raj S, Balint S, Fons CB, Campoy S, Llagostera M, Petrov D (2010) Single dna molecule detection in an optical trap using surface-enhanced raman scattering. Appl Phys Lett 96:213701
Reece PJ, Paiman S, Abdul-Nabi O, Gao Q, Gal M, Tan HH, Jagadish C (2009) Combined optical trapping and microphotoluminescence of single inp nanowires. Appl Phys Lett 95:101109
Saija R, Iatí MA, Giusto A, Denti P, Borghese F (2005) Transverse components of the radiation force on nonspherical particles in the T-matrix formalism. J Quant Spectrosc Radiat Transf 94:163–179
Saija R, Denti P, Borghese F, Maragó OM, Iatì MA (2009) Optical trapping calculations for metal nanoparticles: comparison with experimental data for Au and Ag spheres. Opt Express 17:10231–10241
Seol Y, Carpenter AE, Perkins TT (2006) Gold nanoparticles: enhanced optical trapping and sensitivity coupled with significant heating. Opt Lett 31:2429–2431
Simpson SH (2014) Inhomogeneous and anisotropic particles in optical traps: physical behaviour and applications. J Quant Spectrosc Radiat Transf 146:81–99
Simpson SH, Hanna S (2006) Numerical calculation of interparticle forces arising in association with holographic assembly. JOSA A 23:1419–1431
Simpson SH, Hanna S (2007) Optical trapping of spheroidal particles in gaussian beams. JOSA A 24:430–443
Skelton SE, Sergides M, Memoli G, Maragó OM, Jones PH (2012) Trapping and deformation of microbubbles in a dual-beam fibre-optic trap. J Opt 14:075706
Skelton SE, Sergides M, Saija R, Iatì MA, Maragó OM, Jones PH (2013) Trapping volume control in optical tweezers using cylindrical vector beams. Opt Lett 38:28–30
Svoboda K, Block SM (1994a) Biological applications of optical forces. Annu Rev Biophys Biomol Struct 23:247–285
Svoboda K, Block SM (1994b) Optical trapping of metallic Rayleigh particles. Opt Lett 19:930–932
Swartzlander GA Jr, Peterson TJ, Artusio-Glimpse AB, Raisanen AD (2011) Stable optical lift. Nat Photonics 5:48–51
Tan S, Lopez HA, Cai CW, Zhang Y (2004) Optical trapping of single-walled carbon nanotubes. Nano Letters 4:1415–1419
Tkachenko G, Brasselet E (2014) Optofluidic sorting of material chirality by chiral light. Nat Commun 5:3577
Wang F, Reece PJ, Paiman S, Gao Q, Tan HH, Jagadish C (2011) Nonlinear optical processes in optically trapped inp nanowires. Nano Letters 11:4149–4153
Wang F, Toe WJ, Lee WM, McGloin D, Gao Q, Tan HH, Jagadish C, Reece PJ (2013) Resolving stable axial trapping points of nanowires in an optical tweezers using photoluminescence mapping. Nano Letters 13:1185–1191
Willets KA, Van Duyne RP (2007) Localized surface plasmon resonance spectroscopy and sensing. Annu Rev Phys Chem 58:267–297
Wood BR, Tait B, McNaughton D (2001) Micro-Raman characterisation of the r to t state transition of haemoglobin within a single living erythrocyte. Biochim Biophys Acta (BBA)-Mol Cell Res 1539:58–70
Xie CG, Dinno MA, Li Y-Q (2002) Near-infrared Raman spectroscopy of single optically trapped biological cells. Opt Lett 27:249
Acknowledgments
We acknowledge support from “Programma Operativo Nazionale Ricerca e Competitivitá” 2007–2013, Project PON01_01322 PANREX, Project PAC02L3_00087 SOCIAL-NANO, and the MPNS COST Action 1205 “Advances in Optofluidics: Integration of Optical Control and Photonics with Microfluidics”.
Author information
Authors and Affiliations
Corresponding author
Additional information
This contribution is the written, peer-reviewed version of a paper presented at one of the two conferences “From Life to Life: Through New Materials and Plasmonics”—Accademia Nazionale dei Lincei in Rome on June 23, 2014, and “NanoPlasm 2014: New Frontiers in Plasmonics and NanoOptics”—Cetraro (CS) on June 16–20, 2014.
Rights and permissions
About this article

Cite this article
Magazzú, A., Spadaro, D., Donato, M.G. et al. Optical tweezers: a non-destructive tool for soft and biomaterial investigations. Rend. Fis. Acc. Lincei 26 (Suppl 2), 203–218 (2015). https://doi.org/10.1007/s12210-015-0395-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12210-015-0395-4