
Abstract
In this article, we study the controllability of dynamical systems with \((k,\psi )\)-Hilfer fractional derivative. The Gramian matrix is used to get a necessary and sufficient controllability requirement for linear systems, which are characterized by the Mittag–Leffler (M–L) functions, while the fixed point approach is used to arrive at adequate controllability criteria for nonlinear systems. The novel feature of this study is to inquire into the controllability notion by using \((k,\psi )\)-Hilfer fractional derivative, the most generalized variant of the Hilfer derivative. The advantage of this type of fractional derivative is that it recovers the majority of earlier studies on fractional differential equations (FDEs). Finally, we provide numerical examples to illustrate our main results.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Nowadays, differential equations involving fractional order derivatives are receiving increasing interest in the scientific community due to numerous applications in widespread areas of sciences and engineerings such as signal processing, wave propagation, robotics and models of medicines, etc. [1]. The research publications [2,3,4,5] can be reviewed by the readers on the theory of fractional differential systems. The Hilfer fractional derivative [6] has the technical property that makes it significantly more relevant than other fractional derivatives since it unifies the Riemann–Liouville (R–L) and Caputo fractional derivatives. Due to this reason, Hilfer fractional derivatives are stronger mathematical tools for studying real-world occurrences and the resulting technical advancements [7]. Sousa and Oliveira introduced a new fractional derivative [8] called “\(\psi \)-Hilfer fractional derivative”, which generalizes several earlier fractional derivatives. The advantage of this type of fractional derivative is the flexibility to choose the kernel \(\psi \), which enables the unification and recovery of most earlier studies of FDEs. The importance of \(\psi \)-Hilfer FDEs has made studying these kinds of equations essential.
The concept of k-gamma function was introduced in 2007 by Díaz and Pariguan [9]. They generalized the Euler gamma function \(\Gamma (.)\) as
For \(k\rightarrow 1\), we obtain \(\Gamma _{k}(z)\rightarrow \Gamma (z)\). Many definitions of fractional derivatives and integrals depend on the Euler gamma function. Using the definition of k-gamma function, Kucche and Mali [10] proposed a most generalized version of the Hilfer derivative so-called \((k,\psi )\)-Hilfer fractional derivative. One can obtain the \((k,\psi )\)-R–L and \((k,\psi )\)-Caputo fractional derivatives as a particular case of \((k,\psi )\)-Hilfer fractional derivative. We listed the various fractional derivatives [8, 10,11,12,13] that are particular cases of \((k,\psi )\)-Hilfer fractional derivative in Table 1.
Controllability is one of the fundamental concepts in mathematical control theory. The controllability of a dynamical system means it steers a dynamical system from an arbitrary initial state to a desired final state by using a set of admissible controls. The controllability of nonlinear systems in finite dimensional spaces has been studied extensively using fixed point theorems [14,15,16,17]. Many authors [18,19,20] have established controllability results for linear and nonlinear fractional dynamical systems in finite dimensional spaces using Gramian matrix and rank condition. More recently, Selvam et al. [21] studied the controllability of fractional dynamical systems with \(\psi \)-Caputo fractional derivative. Yet, to our knowledge, no research on the controllability of nonlinear fractional dynamical systems with \((k,\psi )\)-Hilfer fractional derivative has been published. Therefore, in this paper, we study the controllability of nonlinear fractional dynamical systems with \((k,\psi )\)-Hilfer fractional derivative using the Gramian matrix and Schauder fixed point theorem.
Consider the nonlinear FDEs involving \((k,\psi )\)-Hilfer fractional derivative
where \(^{k,H}\textrm{D}_{a^{+}}^{\delta ,\gamma ;\psi }(\cdot )\) is the \((k,\psi )\)-Hilfer fractional derivative of order \(\delta \) and type \(\gamma \) with \(\delta \in (0,k)\), \(0\le \gamma \le 1\), and \(^{k}\textrm{I}_{a^{+}}^{k-\mu _{k};\psi }(\cdot )\) is the \((k,\psi )\)-R–L fractional integral of order \(k-\mu _{k}\). The vectors \(w\in {\mathbb {R}}^{n}\) and \(u\in {\mathbb {R}}^{m}\) are the state variable and control function respectively, \(\textrm{A}\) is an \(n\times n\) matrix, and \(\textrm{B}\) is \(n\times m\) matrix. The continuous function g is the \({\mathbb {R}}^{n}\) valued function from \([\beta _{1},\beta _{2}]\times {\mathbb {R}}^{n}\times {\mathbb {R}}^{m}\).
2 Preliminaries
In this section, we describe the notations, definitions, lemmas, and introductory information that are necessary to establish our main results.
Definition 2.1
[11] Let \(d\in {\mathbb {R}},~1\le p\le \infty \) and \(0<\beta _{1}<\beta _{2}<\infty .\) The space \(\textrm{Y}^{p}_{d}[\beta _{1},\beta _{2}]\) is collection of complex-valued Lebesgue measurable functions on \([\beta _{1},\beta _{2}]\) for which \(\parallel h\parallel _{\textrm{Y}^{p}_{d}}<\infty \), with
and
The space \(\textrm{Y}^{p}_{d}[\beta _{1},\beta _{2}]\) coincides with the space \(\textrm{L}_{p}[\beta _{1},\beta _{2}]\) when \(d=\frac{1}{p},\) and
and
Let \(\textrm{J}=[\beta _{1},\beta _{2}]\) be an interval and \(\psi :\textrm{J}\rightarrow {\mathbb {R}}^{+}\) be an increasing and positive function for all \( s\in \textrm{J}\). The space \(\textrm{C}_{\rho :\psi }(\textrm{J},{\mathbb {R}})\) denotes the weighted functions g defined on \(\textrm{J}\), i.e.
with norm
Definition 2.2
[11] Let \(\psi (x)\in \textrm{C}^{1}(\textrm{J})\) with \(\psi '(x)>0,\forall x\in (\beta _{1},\beta _{2})\). For \(\delta >0\), the \(\psi \)-R–L fractional integral of a function w of order \(\delta \) is defined by
Definition 2.3
[11] Let \(\psi (x)\in \textrm{C}^{1}(\textrm{J})\) with \(\psi '(x)>0,\forall x\in (\beta _{1},\beta _{2})\). For \(\delta >0\), the \(\psi \)-R–L fractional derivative of a function w of order \(\delta \) is defined by
where \(m-1=[\delta ]\).
Definition 2.4
[11] Let \(\psi (x)\in \textrm{C}^{1}(\textrm{J})\) with \(\psi '(x)>0,\forall x\in (\beta _{1},\beta _{2})\). For \(\delta >0\), the \(\psi \)-Caputo fractional derivative of a function w of order \(\delta \) is defined by
where \(m-1=[\delta ].\)
Definition 2.5
[11] Let \(\psi \in \textrm{C}^{m}(\textrm{J})\) be positive function on \((\beta _{1},\beta _{2}]\) such that \(\psi '(x)\) is continuous and \(\psi '(x)>0,\forall x\in (\beta _{1},\beta _{2})\). Let \(w\in \textrm{C}^{m}(\textrm{J})\) then the left \(\psi \)-Hilfer fractional derivative of w of order \(\delta \) and type \(\gamma \) is defined by
where \(m-1=[\delta ].\)
Definition 2.6
[13] Let \(\psi (x)\in \textrm{C}^{1}(\textrm{J})\) with \(\psi '(x)>0,\forall x\in (\beta _{1},\beta _{2})\) and \(w\in \textrm{Y}^{p}_{d}[\beta _{1},\beta _{2}]\). Then, the \((k,\psi )\)-Riemann–Liouville fractional integral of a function w of order \(\delta \) is defined by
Definition 2.7
[10] Let \(\delta ,k\in {\mathbb {R}}_{+}=(0,\infty ),~\gamma \in [0,1],~\psi \in \textrm{C}^{m}(\textrm{J})(m\in {\mathbb {N}}),\psi '(s)\not =0, s\in \textrm{J}\) and \(w\in \textrm{C}^{m}(\textrm{J})\). Then, the \((k,\psi )\)-Hilfer fractional derivative of a function w of order \(\delta \) and type \(\gamma \) is defined by
Definition 2.8
[23] Let \(f,\psi :[\beta _{1},\infty )\rightarrow {\mathbb {R}}\) be functions such that \(\psi \) is continuous and \(\psi '(s)>0\) on \((\beta _{1},\beta _{2})\). Also, let \(\rho ,k>0\). The \((k,\psi )\) generalized Laplace transform of f is defined as the following:
Definition 2.9
[22] Let f and h be two functions which are piecewise continuous at each interval \([\beta _{1},s]\) and of exponential order. We define the generalized convolution of f and h by
The generalized convolution of two functions is commutative.
Lemma 2.10
[23] Let f and h be two functions which are piecewise continuous at each interval \([\beta _{1},s]\) and of exponential order. Then
Lemma 2.11
[23] Let \(f(t)\in \textrm{C}^{m-1}_{\rho :\psi }(\textrm{J},{\mathbb {R}})\) such that \(f^{[j]} (j= 0, 1,\cdots , m-1)\) are \(\psi \)-exponential order. Also, let \(f^{[j]}\) be a piecewise continuous over every finite interval J. Then the \((k,\psi )\)-generalized Laplace transform of \(f^{[m]}\) exists and
Lemma 2.12
[23] Let w(t) be a piecewise continuous over every finite interval \([\beta _{1},s]\) and of \(\psi (t)\)-exponential order. Also, let \(\delta >0\) and \(\psi '(t)>0.\) Then
Lemma 2.13
Let \(w(t)\in \textrm{C}^{1}(\textrm{J})\) be a piecewise continuous and of \(\psi (t)\)-exponential order. Then the generalized Laplace transform of the \((k,\psi )\)-Hilfer fractional derivative is given by
Proof
Using (2.7), we get
Also, using Lemma 2.11 and Lemma 2.12 for \(\rho =k\) in (2.12), we obtain
\(\square \)
Definition 2.14
[5, 11] The two parameters Mittag-Leffler function is defined as
for all \(Re(\mu ),Re(\sigma )>0,w\in {\mathbb {C}}.\) The Mittag-Leffler function for a matrix \(A_{m\times m}\) is given by
Lemma 2.15
[23] Let \(Re(\mu )>0\) and \(\left| \frac{K}{\lambda ^{\mu }}\right| <1.\) Then
and
3 Controllability of linear systems
Now we consider the linear FDEs involving \((k,\psi )\)-Hilfer fractional derivative
where \(^{k,H}\textrm{D}_{\beta _{1}^{+}}^{\delta ,\gamma ;\psi }(.)\) is the \((k,\psi )\)-Hilfer fractional derivative of order \(\delta \) and type \(\gamma \) and \(^{k}\textrm{I}_{\beta _{1}^{+}}^{k-\mu _{k};\psi }(.)\) is the \((k,\psi )\)-Riemann–Liouville fractional integral of order \(k-\mu _{k}\). The vectors \(w\in {\mathbb {R}}^{n}\) and \(u\in {\mathbb {R}}^{m}\) are the state variable and control function respectively, \(\textrm{A}\) is an \(n\times n\) matrix and \(\textrm{B}\) is \(n\times m\) matrix.
Lemma 3.1
The solution of (3.1) is given by
Proof
Applying the generalized Laplace transform to both sides of the equation (3.1) and then using Lemma 2.13, we get
Now taking the inverse generalized Laplace transform of equation (3.3) and using Lemma 2.15
\(\square \)
Definition 3.2
The system (3.1) is said to be controllable on \(\textrm{J}\), if for arbitrary \(w_{\beta _{1}},w_{\beta _{2}}\in {\mathbb {R}}^{n}\), there exists a control function \(u(.)\in \textrm{L}^{2}(\textrm{J},{\mathbb {R}}^{m})\) such that the solution of (3.1) satisfies \(^{k}\textrm{I}_{\beta _{1}^{+}}^{k-\mu _{k};\psi }w(\beta _{1})=w_{\beta _{1}}\) and \(w(\beta _{2})=w_{\beta _{2}}\).
Theorem 3.3
The system (3.1) is controllable on \(\textrm{J}\) if and only if the \(n\times n\) Gramian matrix
is positive definite, here \(*\) denotes the matrix transpose.
Proof
Suppose that \({\mathcal {G}}\) is positive definite, then it is non-singular and therefore its inverse is well-defined. Then defining the control function
is well defined and using the equations (3.4) and (3.5) into (3.2) at \(s=\beta _{2}\), we get
Hence, the system (3.1) is controllable on \(\textrm{J}.\)On the other hand, if \({\mathcal {G}}\) is not positive definite, then there exists a \(z\not =0\) satisfies
that is,
This implies, on \(\textrm{J},\)
Let \(w_{\beta _{1}}=\left[ k^{\left( 1-\frac{\mu _{k}}{k}\right) }(\psi (\beta _{2})-\psi (\beta _{1}))^{\frac{\mu _{k}}{k}-1}\textrm{E}_{\frac{\delta }{k},\frac{\mu _{k}}{k}}\left( k^{-\frac{\delta }{k}}\textrm{A}(\psi (\beta _{2})-\psi (\beta _{1}))^{\frac{\delta }{k}}\right) \right] ^{-1}z\). Since the system (3.1) is controllable on \(\textrm{J}\), there exists a control function u(r) such that the solution of (3.1) satisfies \(^{k}\textrm{I}_{\beta _{1}^{+}}^{k-\mu _{k};\psi }w(\beta _{1})=w_{\beta _{1}}\) and \(w(\beta _{2})=0\). It follows that
So, we have \(z^{*}z=0\), which is contradiction for \(z\not =0\). Thus \({\mathcal {G}}\) is positive definite. \(\square \)
4 Controllability of nonlinear systems
Let \(\textrm{Y}=\textrm{C}_{n}(\textrm{J})\times \textrm{C}_{m}(\textrm{J})\), where \(\textrm{C}_{n}(\textrm{J})\) is the Banach space of continuous \({\mathbb {R}}^{n}\) valued functions defined on \(\textrm{J}\). So, \(\textrm{Y}\) is a Banach space with the norm \(\Vert (w,u)\Vert =\Vert w\Vert +\Vert u\Vert ,\) where \(\Vert w\Vert =\sup \{w(s):s\in \textrm{J}\}\) and \(\Vert u\Vert =\sup \{u(s):s\in \textrm{J}\}\). For given any \((x,v)\in \textrm{Y}\), the system (1.1) is
Lemma 4.1
For a given control \(u(s)\in \textrm{L}^{2}\left( \textrm{J},{\mathbb {R}}^{m}\right) \), the solution of dynamical system (4.1) is
Proof
Proof is similar to Lemma 3.1. \(\square \)
Theorem 4.2
The nonlinear system (1.1) is controllable on \(\textrm{J}\) if g satisfies the condition, for \(|p=(x,v)|=|x|+|v|\), \(\lim \limits _{|p|\rightarrow \infty }\frac{|g(s,p)|}{|p|}=0\) uniformly in \(s\in \textrm{J}\), and its corresponding linear system (3.1) is also controllable on \(\textrm{J}\).
Proof
Define \({\mathcal {L}}:\textrm{Y}\rightarrow \textrm{Y}\) by \({\mathcal {L}}(x,v)=(w,u)\), where
and
For our convenience, we denote the constants
\(\tilde{a_{1}}=\parallel k^{-\frac{\delta }{k}}\psi '(r)\left( \psi (\beta _{2})-\psi (r)\right) ^{\frac{\delta }{k}-1}\parallel \),
\(\tilde{a_{2}}=\parallel \textrm{E}_{\frac{\delta }{k},\frac{\delta }{k}}\left( k^{-\frac{\delta }{k}}\textrm{A}(\psi (\beta _{2})-\psi (r))^{\frac{\delta }{k}}\right) \parallel \),
\({\tilde{a}}=\sup \{1,\tilde{a_{1}}\tilde{a_{2}}\Vert \textrm{B}^{*}\Vert |\beta _{2}-\beta _{1}\Vert \}\),
\(\tilde{b_{1}}=\Vert k^{\left( 1-\frac{\mu _{k}}{k}\right) }(\psi (\beta _{2})-\psi (\beta _{1}))^{\frac{\mu _{k}}{k}-1}\textrm{E}_{\frac{\delta }{k},\frac{\mu _{k}}{k}}\left( k^{-\frac{\delta }{k}}\textrm{A}(\psi (\beta _{2})-\psi (\beta _{1}))^{\frac{\delta }{k}}\right) w_{\beta _{1}}\Vert ,\)
\(\tilde{c_{1}}=4\left[ \tilde{a_{2}}^{2}\Vert \textrm{B}^{*}\Vert {\mathcal {G}}^{-1}(\beta _{2}-\beta _{1})\right] ,\)
\(\tilde{c_{2}}=4\left[ \tilde{a_{1}}\tilde{a_{2}}|\beta _{2}-\beta _{1}|\right] ,\)
\(\tilde{d_{1}}=4\left[ \frac{1}{\tilde{a_{1}}}\Vert \textrm{B}^{*}\Vert \tilde{a_{2}}{\mathcal {G}}^{-1}[|w_{\beta _{2}}+\tilde{b_{1}}|]\right] ,\)
\(\tilde{d_{2}}=4[\tilde{b_{1}}],\)
\({\tilde{d}}=\max \{\tilde{d_{1}},\tilde{d_{2}}\}\),
\(\sup |g|=\sup \{g(r,x(r),v(r));r\in \textrm{J}\}.\)
Now,
and
Let \({\tilde{c}}>0\) and \({\tilde{d}}>0\), choose \({\tilde{r}}>0\) such that \(\Vert q\Vert \le {\tilde{r}},\) by Theorem [24], we have \({\tilde{c}}|g(s,q)|+{\tilde{d}}\le {\tilde{r}}\). Let \(\textrm{X}({\tilde{r}})=\left\{ (z,u):\Vert z\Vert \le \frac{{\tilde{r}}}{2},~\Vert u\Vert \le \frac{{\tilde{r}}}{2}\right\} \) be a convex subset of \(\textrm{Y}\) which is also bounded by \(\frac{{\tilde{r}}}{2}\) and closed. If \((x,v)\in \textrm{X}({\tilde{r}})\) then \(|x(s)+v(s)|\le {\tilde{r}}\) which implies \({\tilde{c}}|g(s,q)|+{\tilde{d}}\le {\tilde{r}} \). Therefore, for every \(s\in \textrm{J}\), \(|u(s)|\le \frac{{\tilde{r}}}{4{\tilde{a}}}\) implies \(\Vert u\Vert \le \frac{{\tilde{r}}}{4{\tilde{a}}}\) implies \(\Vert z\Vert \le \frac{{\tilde{r}}}{2}.\) From the Arzela-Ascoli theorem, \({\mathcal {L}}:\textrm{X}({\tilde{r}})\rightarrow \textrm{X}({\tilde{r}})\) is continuous and compact. By Schauder fixed point theorem, there exists a \((x,v)\in \textrm{X}({\tilde{r}})\) such that \({\mathcal {L}}(x,v)=(x,v)=(w,u)\), where
Then w(s) is the solution of the system (1.1) and
\(w(\beta _{2})=w_{\beta _{2}}\). Hence system (1.1) is controllable on \(\textrm{J}.\) \(\square \)
5 Numerical examples
Example 5.1
Let us take the following nonlinear \((k,\psi )\)-Hilfer fractional differential control system:
Comparing (5.1) with (1.1), we get \(k=1.5,~\delta =0.75,\gamma =\frac{1}{2},\psi (s)=s^{2},~A=\left[ {\begin{array}{cc} -1 &{} 1 \\ 0 &{} 1 \\ \end{array} } \right] ,\) \(B=\left[ {\begin{array}{cc} 2 \\ 1 \\ \end{array} } \right] ,\beta _{1}=0,\beta _{2}=1,w_{0}=\left[ {\begin{array}{cc} 0 \\ 0 \\ \end{array} } \right] ,~g(s,w(s),v(s))=\left[ {\begin{array}{cc} \frac{1}{1+w^{2}_{2}(s)} \\ 0\\ \end{array} } \right] \) and \(w(s)=\left[ {\begin{array}{cc} w_{1}(s) \\ w_{2}(s) \\ \end{array} } \right] \). Let us take \(w(1)=\left[ {\begin{array}{cc} w_{1}(s) \\ w_{2}(s) \\ \end{array} } \right] =\left[ {\begin{array}{cc} 1 \\ -1 \\ \end{array} } \right] .\) The Mittag-Leffler matrix function for the given matrix A is
The controllability Gramian matrix
is positive definite. Therefore, the linear system corresponding to (5.1) is controllable on [0, 1]. Further, \(\lim \limits _{|p|\rightarrow \infty }\frac{|g(s,p)|}{|p|}=0\) uniformly on [0, 1]. The system (5.1) is controllable on [0, 1] by Theorem 4.2. The controlled trajectories of the system (5.1) steering from the initial state \(w(0)=\left[ {\begin{array}{cc} 0 \\ 0 \\ \end{array} } \right] \) to a desired state \(w(1)=\left[ {\begin{array}{cc} 1 \\ -1 \\ \end{array} } \right] \) during [0, 1] can be approximated from the following algorithm
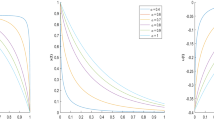
with \(w^{0}(s)=w_{0}\), where \(n=0,1,2,\cdots .\) Using MATLAB, the controlled trajectories and steering control u(s) are computed and are depicted in Figs. 1 and 2.

The trajectory of u(s) of the system (5.1) on [0, 1]

The trajectory of the system (5.1) steers from \(\left[ {\begin{matrix}0\\ 0\end{matrix}}\right] \) to the final state \(\left[ {\begin{matrix}1\\ -1\end{matrix}}\right] \) during the interval [0, 1]
Example 5.2
Let us take the following nonlinear \((k,\psi )\)-Hilfer fractional differential control system:

The trajectory of u(s) of the system (5.2) on [0, 2]

The trajectory of the system (5.2) steers from \(\left[ {\begin{matrix}0\\ 0\end{matrix}}\right] \) to the final state \(\left[ {\begin{matrix}1\\ 2\end{matrix}}\right] \) during the interval [0, 2]
Comparing (5.2) with (1.1), we get \(k=1,~\delta =\frac{1}{2},\gamma =1,\psi (s)=s,~A=\left[ {\begin{array}{cc} 0 &{} 1 \\ 1 &{} 0 \\ \end{array} } \right] ,\)
\(B=\left[ {\begin{array}{cc} 0 \\ 1 \\ \end{array} } \right] ,\beta _{1}=0,\beta _{2}=2,w_{0}=\left[ {\begin{array}{cc} 0 \\ 0 \\ \end{array} } \right] ,~g(s,w(s),v(s))=\left[ {\begin{array}{cc} \sqrt{w^{2}_{1}(s)+2} \\ 0 \\ \end{array} } \right] \) and \(w(s)=\left[ {\begin{array}{cc} w_{1}(s) \\ w_{2}(s) \\ \end{array} } \right] \). Let us take \(w(2)=\left[ {\begin{array}{cc} w_{1}(2) \\ w_{2}(2) \\ \end{array} } \right] =\left[ {\begin{array}{cc} 1 \\ 2 \\ \end{array} } \right] .\) The Mittag-Leffler matrix function for the given matrix A is
where \(\mathrm {N_{1}(s)}=\frac{s^{\frac{-1}{4}}}{2}[\textrm{E}_{\frac{1}{2},\frac{1}{2}}(s)+\textrm{E}_{\frac{1}{2},\frac{1}{2}}(-s)]\) and \(\mathrm {N_{2}(s)}=\frac{s^{\frac{-1}{4}}}{2}[\textrm{E}_{\frac{1}{2},\frac{1}{2}}(s)-\textrm{E}_{\frac{1}{2},\frac{1}{2}}(-s)].\) The controllability Gramian matrix
is positive definite. Therefore, the linear system corresponding to (5.2) is controllable on [0, 2]. Further, \(\lim \limits _{|p|\rightarrow \infty }\frac{|g(s,p)|}{|p|}=0\) uniformly on [0, 2]. The system (5.2) is controllable on [0, 2] by Theorem 4.2. The controlled trajectories of the system (5.2) steering from the initial state \(w(0)=\left[ {\begin{array}{cc} 0 \\ 0 \\ \end{array} } \right] \) to a desired state \(w(2)=\left[ {\begin{array}{cc} 1 \\ 2 \\ \end{array} } \right] \) during [0, 2] can be approximated from the following algorithm
with \(w^{0}(s)=w_{0}\), where \(n=0,1,2,\cdots \). Using MATLAB, the controlled trajectories and steering control u(s) are computed and are depicted in Figs. 3 and 4.
6 Conclusion
In this article, we studied the controllability of fractional dynamical systems involving \((k,\psi )\)-Hilfer fractional derivative. This study of controllability of \((k,\psi )\)-Hilfer fractional derivative gives the controllability results for many other distinct fractional derivatives stated in Table 1. Here, we have used the controllability Gramian matrix and Schauder fixed point technique to establish sufficient conditions for the controllability of fractional dynamical systems. Numerical examples are provided to illustrate the main results.
Availability of data and material
Not applicable.
References
Al-Zhour, Z.: Controllability and observability behaviors of a non-homogeneous conformable fractional dynamical system compatible with some electrical applications. Alex. Eng. J. 61(2), 1055–1067 (2022)
Baleanu, D., Machado, J.A.T., Luo, A.C.J.: Fractional Dynamics and Control. Springer, Berlin (2012)
Atangana, A.: Modelling the spread of COVID-19 with new fractal-fractional operators: can the lockdown save mankind before vaccination? Chaos Solitons Fractals 136, 109860 (2020)
Haque, I., Ali, J., Mursaleen, M.: Solvability of implicit fractional order integral equation in \(\ell _{p}(1\le p<\infty )\) space via generalized Darbo’s fixed point theorem. J. Funct. Spaces (2022)
Podlubny, I.: Fractional Differential Equations. Mathematics in Science and Applications, Academic Press, New York (1999)
Hilfer, R.: Applications of Fractional Calculus in Physics. World Scientific Publishing Co. Inc, River Edge, NJ (2000)
Haque, I., Ali, J., Mursaleen, M.: Existence of solutions for an infinite system of Hilfer fractional boundary value problems in tempered sequence spaces. Alex. Eng. J. 65, 575–583 (2023)
Sausa, J., De Oliveira, E.: On the \(\psi \)-Hilfer fractional derivative. Commun. Nonlinear Sci. Numer. Simul. 60, 72–91 (2018)
Díaz, R., Pariguan, E.: On hypergeometric functions and Pochhammer \(k\)-symbol. Divulg. Math. 15(2), 179–192 (2007)
Kucche, K.D., Mali, A.D.: On the nonlinear (k, \(\psi \))-Hilfer fractional differential equations. Chaos Solitons Fractals 152, 111335 (2021)
Kilbas, A.A., Srivastava, H.M., Trujillo, J.J.: Theory and Applications of Fractional Differential Equations. North-Holland Mathematics Studies, Elsevier Science B.V., Amsterdam 204 (2006)
Almeida, R.: A Caputo fractional derivative of a function with respect to another function. Commun. Nonlinear Sci. Numer. Simul. 44, 460–481 (2017)
Kwun, Y.C., Farid, G., Nazeer, W., Ullah, S., Kang, S.M.: Generalized Riemann–Liouville \(k\)-fractional integrals associated with Ostrowski type inequalities and error bounds of Hadamard inequalities. IEEE Access 6, 64946–64953 (2018)
Balachandran, K., Dauer, J.P.: Controllability of nonlinear systems via fixed point theorems. J. Optim. Theory Appl. 53, 345–352 (1987)
Klamka, J.: Schauder’s fixed point theorem in nonlinear controllability problems. Control. Cybern. 29, 153–165 (2000)
Malik, M., Kumar, A.: Controllability of fractional differential equation of order \(\alpha \in (1, 2]\) with non-instantaneous impulses. Asian J. Control 20(2), 935–942 (2018)
Malik, M., George, R.K.: Trajectory controllability of the nonlinear systems governed by fractional differential equations. Differ. Equ. Dyn. Syst. 27(4), 529–537 (2019)
Bettayeb, M., Djennoune, S.: New results on the controllability and observability of fractional dynamical systems. J. Vib. Control 14(9–10), 1531–1541 (2008)
Balachandran, K., Kokila, J.: On the controllability of fractional dynamical systems. Int. J. Appl. Math. Comput. Sci. 12(3), 523–531 (2012)
Balachandran, K., Park, J.Y., Trujillo, J.J.: Controllability of nonlinear fractional dynamical systems. Nonlinear Anal. Theory Methods Appl. 75(4), 1919–1926 (2012)
Selvam, A.P., Vellappandi, M., Govindaraj, V.: Controllability of fractional dynamical systems with \(\psi \)-Caputo fractional derivative. Phys. Scr. 98(2), 025206 (2023)
Jarad, F., Abdeljawad, T.: Generalized fractional derivatives and Laplace transform. Discrete Contin. Dyn. Syst. Ser. S 13(3), 709–722 (2020)
Başcı, Y., Mısır, A., Öğrekçi, S.: Generalized derivatives and Laplace transform in (k, \(\psi \))-Hilfer form. Math. Methods Appl. Sci. 46(9), 10400–10420 (2023)
Dauer, J.P.: Nonlinear perturbations of quasi-linear control systems. J. Math. Anal. Appl. 54(3), 717–725 (1976)
Acknowledgements
Authors are grateful to the learned referee for the useful comments and suggestions which have led us to improve the quality of the article. The first author thanks to University Grant Commission, India for the support of Maulana Azad National Fellowship under Grant No. 201920- 413816.
Author information
Authors and Affiliations
Contributions
All the authors contributed equally and significantly in writing this paper.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Haque, I., Ali, J. & Malik, M. Controllability of fractional dynamical systems with \((k,\psi )\)-Hilfer fractional derivative. J. Appl. Math. Comput. 70, 3033–3051 (2024). https://doi.org/10.1007/s12190-024-02078-4
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12190-024-02078-4
Keywords
- Fractional dynamical systems
- \((k,\psi )\)-Hilfer
- M–L functions
- Controllability
- Gramian matrix
- Fixed point theorem