
Abstract
It is well-known that nonlinear conjugate gradient (CG) methods are preferred to solve large-scale smooth optimization problems due to their simplicity and low storage. However, the CG methods for nonsmooth optimization have not been studied. In this paper, a modified Polak–Ribière–Polyak CG algorithm which combines with a nonmonotone line search technique is proposed for nonsmooth convex minimization. The search direction of the given method not only possesses the sufficiently descent property but also belongs to a trust region. Moreover, the search direction has not only the gradients information but also the functions information. The global convergence of the presented algorithm is established under suitable conditions. Numerical results show that the given method is competitive to other three methods.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Consider
where \(f:\mathfrak {R}^n\rightarrow \mathfrak {R}\) is a possibly nonsmooth convex function. The problem (1.1) is equivalent to the following problem
where \(F:\mathfrak {R}^n\rightarrow \mathfrak {R}\) is the so-called Moreau-Yosida regularization of f and defined by
where \(\lambda >0\) is a parameter and \(\Vert \cdot \Vert \) denotes the Euclidean norm. A remarkable feature of problem (1.2) is that the objective function F is a differentiable convex function, even when the function f is nondifferentiable. Furthermore, F has a Lipschitz continuous gradient. But, in general, F is not twice differentiable [23]. However, it is shown that, under some reasonable conditions, the gradient function of F can be proved to be semismooth [9, 32]. Based on these features, many algorithms have been proposed for (1.2) (see [3, 9, 32] etc.). The proximal methods have been proved to be effective in dealing with the difficulty of evaluating the function value of F(x) and its gradient \(\nabla F(x)\) at a given point x (see [5, 7, 19]). Lemaréchal [21] and Wolfe [39] initiated a giant stride forward in nonsmooth optimization by the bundle concept, which can handle convex and nonconvex f. All bundle methods carry two distinctive features: (i) They make use at the iterate \(x_k\) of the bundle of information \((f(x_k),\, g(x_k)),\,\, (f(x_{k-1}),g(x_{k-1})),\ldots \) collected so far to build up a model of f; (ii) If, due to the kinky structure of f, this model is not yet an adequate one, then they mobilize even more subgradient information close to \(x_k\) (or see Lemaréchal [22] and Zowe [48] in detail), where \(x_k\) the kth iteration and \(g(x_k)\in \partial f(x_k)\) (\(\partial f(x)\) is the subdifferential of f at x). Some further results can be found (see [18, 20, 33, 34] etc.). Recently, Yuan et al. [43] gave the conjugate gradient algorithm for large-scale nonsmooth problems and get some good results. In this paper, we will provide a new way to solve (1.2). The idea is motivated by the differentiability of F. We all know that there are many efficient methods for smooth optimization problems, where the nonlinear CG method is one of them. However the CG method for nonsmooth problems has not been studied. Considering the differentiability of F(x) and the same solution set of (1.1) and (1.2), we present a CG method for (1.2) instead of solving f(x).
The nonlinear conjugate gradient method is one of the most effective line search methods for smooth unconstrained optimization problem
where \(h:\mathfrak {R}^n\rightarrow \mathfrak {R}\) is continuously differentiable. The CG method has simplicity, low storage, practical computation efficiency and nice convergence properties. The PRP (\(\beta ^{\textit{PRP}},\) see [27, 28]) method is one of the most efficient CG methods. It has been further studied by many authors (see [8, 10, 12, 29, 30] etc.). The sufficiently descent condition is often used to analyze the global convergence of the nonlinear conjugate gradient method. Many authors hinted that the sufficiently descent condition may be crucial for conjugate gradient methods [1, 2]. There are many modified nonlinear conjugate gradient formulas which possesses the sufficiently descent property without any line search (see [14, 15, 36, 41, 46] etc.). At present, the CG methods are only used to solve smooth optimization problems. Whether can the CG method be extent to solve nonsmooth problem (1.2)? We answer this question positively. Another effective method for unconstrained optimization (1.4) is quasi-Newton secant methods which obey the recursive formula
where \(B_k\) is an approximation Hessian of h at \(v_k\). The sequence of matrix \(\{B_k\}\) satisfies the secant equation
where \(S_k=v_{k+1}-v_k\) and \(\delta _k=\nabla h(v_{k+1})-\nabla h(v_k).\) Obviously, only two gradients are exploited in the secant equation (1.5), while the function values available are neglected. Hence, techniques using gradients values as well as function values have been studied by several authors. An efficient attempt is due to Zhang et al. [44]. They developed a new secant equation which used both gradient values and function values. This equation is defined by
where \(\delta _k^1=\delta _k+\gamma _k^1S_k\) and \(\gamma _k^1=\frac{3(\nabla h(v_{k+1})+\nabla h(v_k))^TS_k+6(h(v_k)-h(v_{k+1}))}{\Vert S_k\Vert ^2}.\) The new secant equation is superior to the usual one (1.5) in the sense \(\delta _k^1\) better approximates \(\nabla ^2 h(v_{k+1})S_k\) than \(\delta _k\). Consequently, the matrix which is obtained from the modified quasi-Newton update better approximates the Hessian matrix (see [44] in detail). Another significant attempt is due to Wei et al. (see [37]) and the equation is defined by
where \(\delta _k^2=\delta _k+\gamma _k^2S_k\) and \(\gamma _k^2=\frac{(\nabla h(v_{k+1})+\nabla h(v_k))^TS_k+3(h(v_k)-h(v_{k+1}))}{\Vert S_k\Vert ^2}.\) A remarkable property of this secant equation (1.7) is that, if h is twice continuously differentiable and \(B_{k+1}\) is updated by the BFGS method, then the equality
holds for all k. Moreover this property is independent of any convexity assumption on the objective function. Furthermore, this equality does not hold for any update formula which is based on the usual secant condition (1.5), even for the new one (1.6). Additionally, comparing with the secant equation (1.6), one concludes that \(\gamma _k^2=\frac{1}{3}\gamma _k^1\). This is a very interesting fact. The superlinear convergence theorem of the corresponding BFGS method was established in [38]. Moreover, the work of [38] was extended to deal with large-scale problems in a limited memory scheme in [40]. The reported numerical results show that this extension is beneficial to the performance of the algorithm. However, the method based on (1.6) does not possess the global convergence and the superlinear convergence for general convex functions. In order to overcome this drawback, Yuan and Wei [42] presented the following secant equation
where \(\delta _k^3=\delta _k+\gamma _k^3S_k\) and \(\gamma _k^3=\max \left\{ 0,\frac{(\nabla h(v_{k+1})+\nabla h(v_k))^TS_k+3(h(v_k)-h(v_{k+1}))}{\Vert S_k\Vert ^2}\right\} .\) Numerical results show that this method is competitive to other quasi-Newton methods (see [42]). Can these modified quasi-Newton methods be used in CG methods and extent to nonsmooth problems? One directive way is to replace the normal \(\delta _k\) by modified \(\delta _k^1\) (\(\delta _k^2\) or \(\delta _k^3\)) in CG formulas. Considering this view, we will present a modified CG method for nonsmooth problem (1.2), where the CG formula possesses not only the gradient values but also the function values.
The line search framework is often used in smooth and nonsmooth fields, where the earliest nonmonotone line search technique was developed by Grippo, Lampariello, and Lucidi in [11] for Newton’s methods. Many subsequent papers have exploited nonmonotone line search techniques of this nature (see [4, 16, 24, 47] etc.). Although these nonmonotone technique work well in many cases, there are some drawbacks. First, a good function value generated in any iteration is essentially discarded due to the max in the nonmonotone line search technique. Second, in some cases, the numerical performance is very dependent of the choice of M (see [11, 35]). In order to overcome these two drawbacks, Zhang and Hager [45] presented a new nonmonotone line search technique. Numerical results show that this technique is better than the normal nonmonotone technique and the monotone technique.
Motivated by the above observations, we will present a modified PRP conjugate gradient method which combines with a nonmonotone line search technique for (1.2). The main characteristics of this method are as follows.
-
A conjugate gradient method is introduced for nonsmooth problem (1.1) and (1.2).
-
All search directions are sufficient descent, which shows that the function values are decreasing.
-
All search directions are in a trust region, which hints that this method has good convergent results.
-
The global convergence is established under suitable conditions.
-
Numerical results show that this method is competitive to other three methods.
This paper is organized as follows. In the next section, we briefly review some known results of convex analysis and nonsmooth analysis. In Sect. 3, we deduce motivation of the search direction and the given algorithm. In Sect. 4, we prove the global convergence of the proposed method. Numerical results are reported in Sect. 5 and one conclusion is given in the last section. Throughout this paper, without specification, \(\Vert \cdot \Vert \) denotes the Euclidean norm of vectors or matrices.
2 Results of convex analysis and nonsmooth analysis
Some basic results in convex analysis and nonsmooth analysis, which will be used later, are reviewed in this section. Let
and denote \(p(x)=\text {argmin} \theta (z),\) where \(\lambda >0\) is a scalar. Then p(x) is well-defined and unique since \(\theta (z)\) is strongly convex. By (1.3), F(x) can be expressed by
In what follows, we denote the gradient of F by g. Some features about F(x) can be seen in [5, 7, 17]. The generalized Jacobian of F(x) and the property of BD-regular can be found in [6, 31] respectively. Some properties are given as follows.
(i) The function F is finite-valued, convex, and everywhere differentiable with
Moreover, the gradient mapping \(g:\mathfrak {R}^n\rightarrow \mathfrak {R}^n\) is globally Lipschitz continuous with modulus \(\lambda ,\) i.e.,
(ii) x is an optimal solution to (1.1) if and only if \(\nabla F(x)=0,\) namely, \(p(x)=x.\)
(iii) By the Rademacher theorem and the Lipschitzian property of \(\nabla F,\) the set of generalized Jacobian matrices (see [17])
is nonempty and compact for each \(x\in \mathfrak {R}^n,\) where \(D_g=\{x\in \mathfrak {R}^n: \hbox {g is } \hbox {differentiable} \hbox {at x}\}.\) Since g is a gradient mapping of the convex function F, then every \(V\in \partial _Bg(x)\) is a symmetric positive semidefinite matrix for each \(x\in \mathfrak {R}^n.\)
(iv) If g is BD-regular at x, namely all matrices \(V\in \partial _Bg(x)\) are nonsingular. Then, for all \(y\in \Omega ,\) there exist constants \(\mu _1>0,\,\mu _2>0\) and a neighborhood \(\Omega \) of x such that
It is obviously that F(x) and g(x) can be obtained through the optimal solution of \(\text {argmin}_{z\in \mathfrak {R}^n}\theta (z).\) However, p(x), the minimizer of \(\theta (z),\) is difficult or even impossible to exactly solve. Such makes that we can not apply the exact value of p(x) to define F(x) and g(x). Fortunately, for each \(x\in \mathfrak {R}^n\) and any \(\varepsilon >0,\) there exists a vector \(p^\alpha (x,\varepsilon )\in \mathfrak {R}^n\) such that
Thus, we can use \(p^\alpha (x,\varepsilon )\) to define approximations of F(x) and g(x) by
and
respectively. A remarkable feature of \(F^\alpha (x,\varepsilon )\) and \(g^\alpha (x,\varepsilon )\) is given as follows (see [9]).
Proposition 2.1
Let \(p^\alpha (x,\varepsilon )\) be a vector satisfying (2.3), \(F^\alpha (x,\varepsilon )\) and \(g^\alpha (x,\varepsilon )\) are defined by (2.4) and (2.5), respectively. Then we get
and
The above proposition says that we can approximately compute \(F^\alpha (x,\varepsilon )\) and \(g^\alpha (x,\varepsilon ).\) By choosing parameter \(\varepsilon \) small enough, \(F^\alpha (x,\varepsilon )\) and \(g^\alpha (x,\varepsilon )\) may be made arbitrarily close to F(x) and g(x), respectively.
3 Motivation and algorithm
The following iterative formula is often used by CG method for (1.4)
where \(v_k\) is the current iterate point, \(\alpha _k > 0\) is a steplength, and \(q_k\) is the search direction defined by
where \(\nabla h_{k+1}=\nabla h(v_{k+1})\) and \(\beta _k \in \mathfrak {R}\) is a scalar which determines different conjugate gradient methods. In order to ensure that search direction is sufficiently descent, Zhang et al. [46] presented a modified PRP method with
where \(\vartheta _k=\frac{\nabla h_{k+1}^Tq_{k}}{\Vert \nabla h_{k}\Vert ^2},\) \(\beta _k^{\textit{PRP}}=\frac{\nabla h_{k+1}^T\delta _k}{\Vert \nabla h_k\Vert ^2},\) and \(\delta _k=\nabla h_{k+1}-\nabla h_{k}.\) It is not difficult to get \(q_k^T\nabla h_k=-\Vert \nabla h_k\Vert ^2.\) This method can be reduced to a standard PRP method if exact line search is used. Its global convergence with Armijo-type line search is obtained, but fails to weak wolfe-Powell line search. Even though this method has descent property, the direction search may not be a descent direction when \(v_k\) is far from the solution. In order to ensure the convergence of the given algorithm, the search direction should belong to a trust region. Motivated by this consideration, the method (3.3), and the observations in Sects. 1 and 2, we propose a modified PRP conjugate gradient formula for (1.2)
where \(y_k^*=y_k+A_ks_k,\,\,y_k=g^\alpha (x_{k+1},\varepsilon _{k+1})-g^\alpha (x_{k},\varepsilon _{k}),\,\,s_k=x_{k+1}-x_k,\) and
It is easy to see that the given method can be reduced to a standard PRP method if exact line search is used. For all k, we can easily get \(d_{k+1}^Tg^\alpha (x_{k+1},\varepsilon _{k+1})= -\Vert g^\alpha (x_{k+1},\varepsilon _{k+1})\Vert ^2,\) which means that the proposed direction satisfies the sufficiently descent properties. Many authors hinted that the sufficiently descent condition may be crucial for conjugate gradient methods [1, 2]. This property can ensure that the function values is decreasing. Combining with a nonmonotone line search technique, we list the steps of our algorithm as follows.
Algorithm 3.1
Nonmonotone Conjugate Gradient Algorithm.
Step 0. Initialization. Given \(x_0 \in \mathfrak {R}^n, \,\,E_0\in \mathfrak {R},\) \(\sigma \in (0,1),\,\,s>0,\,\,\lambda >0,\,\rho \in [0,1],\,E_0=1,\,\,J_0=F^\alpha (x_0,\varepsilon _0),\,\,d_0=-g^\alpha (x_0,\varepsilon _0)\) and \(\epsilon \in (0,1).\) Let \(k=0.\)
Step 1. Termination Criterion. Stop if \(x_k\) satisfies termination condition \(\Vert g^\alpha (x_k,\varepsilon _k)\Vert < \epsilon \) of problem (1.2).
Step 2: Choose a scalar \(\varepsilon _{k+1}\) such that \(0<\varepsilon _{k+1}<\varepsilon _{k}\) and compute step size \(\alpha _k\) by the following Armijo-type line search rule
where \(\alpha _k=s\times 2^{-i_k},\,\,i_k\in \{0,1,2,\ldots \}.\)
Step 3: Let \(x_{k+1}=x_k+\alpha _kd_k.\) If \(\Vert g^\alpha (x_{k+1},\varepsilon _{k+1})\Vert <\epsilon ,\) then stop.
Step 4: Update \(J_k\) by
Step 5: Calculate the search direction by (3.4).
Step 6: Set \(k:=k+1\) and go to Step 2.
Remark
It is not difficult to see that \(J_{k+1}\) is a convex combination of \(J_k\) and \(F^\alpha (x_{k+1},\varepsilon _{k+1}).\) Since \(J_0=F^\alpha (x_0,\varepsilon _0),\) it follows that \(J_k\) is a convex combination of the function values \(F^\alpha (x_0,\varepsilon _0), F^\alpha (x_1,\varepsilon _1),\,\ldots , F^\alpha (x_k,\varepsilon _k).\) The choice of \(\rho \) controls the degree of nonmonotonicity. If \(\rho =0\), then the line search is the usual monotone Armijo line search. If \(\rho =1\), then \(J_k=C_k,\) where
is the average function value.
4 Properties and global convergence
In the section, we turn to the behavior of Algorithm 3.1 when it is applied to problem (1.1). In order to get the global convergence of Algorithm 3.1, the following assumptions are needed.
Assumption A
(i) The sequence \(\{V_k\}\) is bounded, i.e., there exists a positive constant M such that
(ii) F is bounded from below.
(iii) For sufficiently large \(k,\,\,\varepsilon _k\) converges to zero.
The following lemma shows that the conjugate gradient direction possesses the sufficiently descent property and belongs to a trust region.
Lemma 4.1
For all \(k\ge 0,\) we have
and
Proof
For \(k=0,\) \(d_0=-g^\alpha (x_0,\varepsilon _0),\) we get (4.2) and (4.3). For \(k\ge 1,\) from the definition of \(d_k\), we obtain
Then the relation (4.2) holds. Now we turn to prove that (4.3) holds too. By the definition of \(d_k\) again, we get
where the last inequality follows
Then this completes the proof. \(\square \)
Based on the above lemma, similar to Lemma 1.1 in [45], it is not difficult to get the following lemma. So we only state as follows but omit the proof.
Lemma 4.2
Let Assumption A hold and the sequence \(\{x_k\}\) be generated by Algorithm 3.1. Then for each k, we have \(F^\alpha (x_{k},\varepsilon _k)\le J_k\le C_k.\) Moreover, there exists an \(\alpha _k\) satisfying Armijo conditions of the line search update.
The above lemma shows that Algorithm 3.1 is well-defined.
Lemma 4.3
Let Assumption A hold and the sequence \(\{x_k\}\) be generated by Algorithm 3.1. Suppose that \(\varepsilon _k=o(\alpha _k^2\Vert d_k\Vert ^2)\) holds. Then, for sufficiently large k, there exists a positive constant \(m_0\) such that
Proof
Let \(\alpha _k\) satisfy the line search (3.5). If \(\alpha _k\ge 1,\) the proof is complete. Otherwise we have \(\alpha _k'=\frac{\alpha _k}{2}\) satisfying
By Lemma 4.2, we have \(F^\alpha (x_{k},\varepsilon _k)\le J_k\le C_k\), then
holds. Using (4.5), (2.6), and Taylor’s formula, we get
where \(V(\xi _k)\in \partial _B g(\xi _k),\,\,\xi _k=x_k+\theta \alpha _k' d_{k},\,\,\theta \in (0,1),\) and the last inequality follows (4.1). It follows that from (4.6)
where the second inequality follows (2.8), (4.2), and \(\varepsilon _{k+1}\le \varepsilon _k,\) the equality follows \(\varepsilon _k=o(\alpha _k^2\Vert d_k\Vert ^2),\) and the last inequality follows (4.3). Thus, we have
Let \(m_0\in \Big (0,\frac{1-\sigma }{M}\Big ],\) we complete the proof. \(\square \)
Now we prove the global convergence of Algorithm 3.1.
Theorem 4.1
Let the conditions in Lemma 4.3 hold. Then, \(\lim _{k\rightarrow \infty } \Vert g(x_k)\Vert =0\) and any accumulation point of \(x_k\) is an optimal solution of (1.1).
Proof
We first show that
Suppose that (4.8) is not true. Then there exist \(\epsilon _0>0\) and \(k_0>0\) satisfying
By (3.5), (4.2), (4.4), and (4.9), we get
By the definition of \(J_{k+1},\) we have
Since \(F^\alpha (x,\varepsilon )\) is bounded from below and \(F^\alpha (x_{k},\varepsilon _{k})\le J_k\) holds for all k, we conclude that \(J_k\) is bounded from below. It follows that from (4.10) that
By the definition of \(E_{k+1},\) we get \(E_{k+1}\le k+2,\) then (4.8) holds. By (2.8), we have
Together with Assumption A(iii), this means that
holds. Let \(x^*\) be an accumulation point of \(\{x_k\},\) without loss of generality, there exists a subsequence \(\{x_k\}_K\) satisfying
From properties of F(x), we have \(g(x_k)=(x_k-p(x_k))/\lambda .\) Then by (4.12) and (4.13), \(x^*=p(x^*)\) holds. Therefore \(x^*\) is an optimal solution of (1.1). \(\square \)
5 Numerical results
5.1 Small-scale problems
The nonsmooth problems of Table 1 can be found in [26]. Table 1 contains problem dimensions and optimum function values.
The algorithm is implemented by Matlab 7.6, experiments are run on a PC with CPU Intel Pentium Dual E7500 2.93GHz, 2G bytes of SDRAM memory, and Windows XP operating system. The parameters were chosen as \(s=\lambda =1,\,\,\rho =0.5,\,\,\sigma =0.8,\) and \(\varepsilon _k=1/(NI+2)^2\) (NI is the iteration number). For problem \(\min \,\theta (x),\) we use the function fminsearch of Matlab to get the solution p(x). We stopped the iteration when the condition \(\Vert g^\alpha (x,\varepsilon )\Vert \le 10^{-10}\) was satisfied. In order to show the performance of the given algorithm, we also list the results of paper [25] (proximal bundle method, PBL) and the paper [34] (trust region concept, BT). The numerical results of PBL and BT can be found in [25]. The columns of Table 2 have the following meanings:
Problem: the name of the test problem.
NI: the total number of iterations.
NF: the iteration number of the function evaluations.
f(x): the function evaluations at the final iteration.
\(f_{ops}(x)\): the optimization function evaluation.
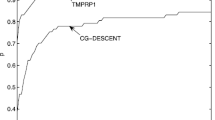
From the numerical results in Table 2, for most of the test problems, it is not difficult to see that Algorithm 3.1 performs best among these three methods. The function value of the PBL and the BT more approximate to the optimization evaluation than Algorithm 3.1 does. Overall we think that the method provide a valid approach for solving nonsmooth problems.
5.2 Large-scale problems
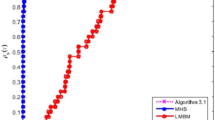
The following problems of Table 3 can be found in [13]. The numbers of variables used were 1000. The values of parameters were similar to the small-scale problems. The following experiments were implemented in Fortran 90. In order to show the performance of the given algorithm, we compared it with the method (LMBM) of paper [13]. The stop rule and parameters are the same as [13].
LMBM [13]. New limited memory bundle method for large-scale nonsmooth optimization. The fortran codes are contributed by Haarala, Miettinen, and Mäkelä, which are available at
http://napsu.karmitsa.fi/lmbm/.
For these six large-scale problems, the iteration number of Algorithm 3.1 is competitive to those of the LMBM method. The final gradient value of the LMBM is better than those of the given algorithm. Taking everything together, the preliminary numerical results indicate the proposed method is efficient (Table 4).
6 Conclusion
In this paper, we propose a conjugate gradient method for nonsmooth convex minimization. The global convergence is established under suitable conditions. Numerical results show that this method is interesting. The CG method has simplicity and low memory requirement, the PRP method is one of the most effective CG methods, the nonmonotone line search technique of [45] is competitive to other line search techniques, and the secant equation of [42] possesses better properties for general convex functions. Based on the above four cases, we present a modified PRP CG algorithm with a nonmonotone line search technique for nonsmooth optimization problems. This method has sufficiently descent property and the search direction belongs to a trust region. Moreover this method possesses the gradients information but also the functions information. The main work of this paper is to extend the CG method to solve nonsmooth problems.
References
Ahmed, T., Storey, D.: Efficient hybrid conjugate gradient techniques. Journal of Optimization Theory and Applications 64, 379–394 (1990)
Al-Baali, A.: Descent property and global convergence of the Flecher–Reeves method with inexact line search. IMA Journal of Numerical Analysis 5, 121–124 (1985)
Birge, J.R., Qi, L., Wei, Z.: A general approach to convergence properties of some methods for nonsmooth convex optimization. Applied Mathematics & Optimization 38, 141–158 (1998)
Birgin, E.G., Martinez, J.M., Raydan, M.: Nonmonotone spectral projected gradient methods on convex sets. SIAM Journal on Optimization 10, 1196–1121 (2000)
Bonnans, J.F., Gilbert, J.C., Lemaréchal, C., Sagastizábal, C.A.: A family of veriable metric proximal methods. Mathematical Programming 68, 15–47 (1995)
Calamai, P.H., Moré, J.J.: Projected gradient methods for linear constrained problems. Mathematical Programming 39, 93–116 (1987)
Correa, R., Lemaréchal, C.: Convergence of some algorithms for convex minization. Mathematical Programming 62, 261–273 (1993)
Dai, Y., Yuan, Y.: Nonlinear Conjugate Gradient Methods. Shanghai Scientific and Technical Publishers, Shanghai (1998)
Fukushima, M., Qi, L.: A global and superlinearly convergent algorithm for nonsmooth convex minimization. SIAM Journal on Optimization 6, 1106–1120 (1996)
Gilbert, J.C., Nocedal, J.: Global convergence properties of conjugate gradient methods for optimization. SIAM Journal on Optimization 2, 21–42 (1992)
Grippo, L., Lampariello, F., Lucidi, S.: A nonmonotone line search technique for newton’s method. SIAM Journal on Numerical Analysis 23, 707–716 (1986)
Grippo, L., Lucidi, S.: A globally convergent version of the Polak–Ribière gradient method. Mathematical Programming 78, 375–391 (1997)
Haarala, M., Miettinen, K., Mäkelä, M.M.: New limited memory bundle method for large-scale nonsmooth optimization. Optimization Methods and Software 19, 673–692 (2004)
Hager, W.W., Zhang, H.: A new conjugate gradient method with guaranteed descent and an efficient line search. SIAM Journal on Optimization 16, 170–192 (2005)
Hager, W.W., Zhang, H.: Algorithm 851: CGDESCENT, a conjugate gradient method with guaranteed descent. ACM Transactions on Mathematical Software 32, 113–137 (2006)
Han, J.Y., Liu, G.H.: Global convergence analysis of a new nonmonotone BFGS algorithm on convex objective functions. Computational Optimization and Applications 7, 277–289 (1997)
Hiriart-Urruty, J.B., Lemmaréchal, C.: Convex Analysis and Minimization Algorithms II. Springer, Berlin (1983)
Kiwiel, K.C.: Methods of Descent for Nondifferentiable Optimization. Springer, Berlin (1985)
Kiwiel, K.C.: Proximal level bundle methods for convex nondifferentiable optimization, saddle-point problems and variational inequalities. Mathematical Programming 69, 89–109 (1995)
Kiwiel, K.C.: Proximity control in bundle methods for convex nondifferentiable optimization. Mathematical Programming 46, 105–122 (1990)
Lemaréchal, C.: Extensions Diverses des Médthodes de Gradient et Applications. Thèse d’Etat, Paris (1980)
Lemaréchal, C.: Nondifferentiable optimization. In: Nemhauser, G.L., Rinnooy Kan, A.H.G., Todd, M.J. (eds.) Handbooks in Operations Research and Management Science, Vol. 1, Optimization. North-Holland, Amsterdam (1989)
Lemaréchal, C., Sagastizábal, C.: Practical aspects of the Moreau-Yosida regularization: Theoretical preliminaries. SIAM Journal on Optimization 7, 367–385 (1997)
Liu, G.H., Peng, J.M.: The convergence properties of a nonmonotonic algorithm. Journal of Computational Mathematics 1, 65–71 (1992)
Lukšan, L., Vlček, J.: A bundle-Newton method for nonsmooth unconstrained minimization. Mathematical Programming 83, 373–391 (1998)
Lukšan, L., Vlček, J. (2000). Test Problems for Nonsmooth Unconstrained and Linearly Constrained Optimization, Technical Report No. 798, Institute of Computer Science, Academy of Sciences of the Czech Republic
Polak, E., Ribière, G.: Note sur la convergence de directions conjugées. Revue Francaise informat Recherche Opératinelle 3, 35–43 (1969)
Polyak, B.T.: The conjugate gradient method in extreme problems. USSR Computational Mathematics and Mathematical Physics 9, 94–112 (1969)
Powell, M.J.D.: Nonconvex Minimization Calculations and the Conjugate Gradient Method, Vol. 1066 of Lecture Notes in Mathematics. Spinger, Berlin (1984)
Powell, M.J.D.: Convergence properties of algorithm for nonlinear optimization. SIAM Review 28, 487–500 (1986)
Qi, L.: Convergence analysis of some algorithms for solving nonsmooth equations. Mathematics of Operations Research 18, 227–245 (1993)
Qi, L., Sun, J.: A nonsmooth version of Newton’s method. Mathematical Programming 58, 353–367 (1993)
Schramm, H.: Eine kombination yon bundle-und trust-region-verfahren zur Lösung nicht- differenzierbare optimierungsprobleme, Bayreuther Mathematische Schriften, Heft 30. University of Bayreuth, Bayreuth (1989)
Schramm, H., Zowe, J.: A version of the bundle idea for minimizing a nonsmooth function: conceptual idea, convergence analysis, numerical results. SIAM Journal on Optimization 2, 121–152 (1992)
Toint, P.L.: An assessment of non-monotone line search techniques for unconstrained minimization problem. SIAM Journal on Computing 17, 725–739 (1996)
Wei, Z., Li, G., Qi, L.: Global convergence of the Polak–Ribiere–Polyak conjugate gradient methods with inexact line search for nonconvex unconstrained optimization problems. Mathematics of Computation 77, 2173–2193 (2008)
Wei, Z., Li, G., Qi, L.: New quasi-Newton methods for unconstrained optimization problems. Applied Mathematics and Computation 175, 1156–1188 (2006)
Wei, Z., Yu, G., Yuan, G., Lian, Z.: The superlinear convergence of a modified BFGS-type method for unconstrained optimization. Computational Optimization and Application 29, 315–332 (2004)
Wolfe, P.: A method of conjugate subgradients for minimizing nondifferentiable convex functions. Mathematical Programming Study 3, 145–173 (1975)
Xiao, Y., Wei, Z., Wang, Z.: A limited memory BFGS-type method for large-scale unconstrained optimization. Computational Mathematics Applications 56, 1001–1009 (2008)
Yuan, G.: Modified nonlinear conjugate gradient methods with sufficient descent property for large-scale optimization problems. Optimization Letters 3, 11–21 (2009)
Yuan, G., Wei, Z.: Convergence analysis of a modified BFGS method on convex minimizations. Computational Optimization and Applications 47, 237–255 (2010)
Yuan, G., Wei, Z., Li, G.: A modified PolakCRibièreCPolyak conjugate gradient algorithm for nonsmooth convex programs. Journal of Computational and Applied Mathematics 255, 86–96 (2014)
Zhang, J., Deng, N., Chen, L.: New quasi-Newton equation and related methods for unconstrained optimization. Journal of Optimization Theory and Application 102, 147–167 (1999)
Zhang, H., Hager, W.: A nonmonotone line search technique and its application to unconstrained optimization. SIAM Journal on Optimization 14, 1043–1056 (2004)
Zhang, L., Zhou, W., Li, D.: A descent modified Polak–Ribière–Polyak conjugate method and its global convergence. IMA Journal on Numerical Analysis 26, 629–649 (2006)
Zhou, J., Tits, A.: Nonmonotone line search for minimax problem. Journal Optimization Theory and Applications 76, 455–476 (1993)
Zowe, J.: Computational mathematical programming. In: Schittkowski, K. (ed.) Nondifferentiable optimization, pp. 323–356. Springer, Berlin (1985)
Acknowledgments
We would like to thank the anonymous referees for catching several typos of the paper, and their useful suggestions and comments which improved the paper greatly. This work is supported by the Guangxi NSF (Grant No. 2012GXNSFAA053002) and the China NSF (Grant Nos. 11261006 and 11161003).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Yuan, G., Wei, Z. A modified PRP conjugate gradient algorithm with nonmonotone line search for nonsmooth convex optimization problems. J. Appl. Math. Comput. 51, 397–412 (2016). https://doi.org/10.1007/s12190-015-0912-8
Received:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12190-015-0912-8