
Abstract
In this paper, we develop a modified weak Galerkin finite element method on arbitrary grids for convection–diffusion problems in two dimensions based on our previous work (Wang et al., J Comput Appl Math 271, 319–327, 2014), in which we only considered second order Poisson equations and thus only introduced a modified weak gradient operator. This method, called MWG-FEM, is based on a modified weak gradient operator and weak divergence operator which is put forward in this paper. Optimal order error estimates are established for the corresponding MWG-FEM approximations in both a discrete \(H^1\) norm and the standard \(L^2\) norm. Numerical results are presented to demonstrate the robustness, reliability, and accuracy of the MWG-FEM.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
In this paper, we are concerned with a MWG-FEM for the convection-diffusion problems in two-dimensional space which seeks an unknown function \(u=u(x,y)\) satisfying
where \(\Omega \subset R^2\) is a bounded domain with boundary \(\Gamma =\partial \Omega \); \(a=a(x,y)\) is the diffusion coefficient such that \(0<a_0\le a(x,y)\le a_1,\;(x,y)\in \Omega \), here \(a_0, a_1\) are positive constants, and \(\mathbf{b}=\mathbf{b}(x,y):=(b_1(x,y),b_2(x,y))^T\) is the convection velocity, and \(c=c(x,y)\ge 0\) is reaction coefficient, \(f(x,y)\) is the right side function, \(g(x,y)\) is the prescribed Dirichlet data on the boundary \(\Gamma \), and \(u=u(x,y)\) is the unknown function representing the concentration of the solution in the flow. We impose the physical condition
It is well known that the convection–diffusion equation that involves a combination of convection and diffusion dynamical processes is a fundamental equation describing the process of fluid transfer and is widely used in many fields of science and engineering, such as fluid mechanics, petroleum reservoir simulation, groundwater water contamination, and environmental protection (see, for example Ref. [1, 2, 10], etc.). In many such applications the convection term essentially dominates the diffusion term. The numerical approximation to the problems presents a challenging computational task. It is well documented that the governing equation is convection-dominated. Many standard methods, developed for diffusion-dominated processes such as the standard finite difference (volume) or finite element methods, often exhibit severe non-physical oscillations since the corresponding discrete schemes are unstable for the problems.
The weak Galerkin (WG) method refers to general finite element techniques for partial differential equations in which differential operators are approximated by weak forms as distributions. In [11], a WG method was introduced and analyzed for second order elliptic equations based on a discrete weak gradient arising from local RT [8] or BDM [5] elements. However the WG finite element formulation of [11] was limited to classical finite element partitions of triangles (d \(=\) 2) or tetrahedra (d \(=\) 3). This restriction was lifted for WG mixed finite element formulation developed in [12]. In [9], we introduced a new discrete weak gradient operator and a new WG finite element method for second order Poisson equations based on this new operator. The goal of this paper is to introduce a new discrete weak divergence operator and a MWG-FEM for convection–diffusion Eqs. (1) and (2) based on these new operators.
The paper is organized as follows. In Sect. 2, we introduce the definition and approximation of the modified weak gradient operator and weak divergence operator. In this section, we define some local projection operators. In Sect. 3, we provide a detailed description for the MWG finite element scheme, including a discussion on the element shape regularity assumption. We also derive some approximation properties which are useful in error analysis. In Sect. 4, we establish an optimal order error estimate for the MWG finite element approximation in a \(H^1\)-equivalent discrete norm. We also derive an optimal order error estimate in \(L^2\) by using a duality argument as was commonly employed in the standard Galerkin finite element methods [3, 6]. Finally, in Sect. 5, we present some numerical results which confirm the theory developed in earlier sections.
2 Discrete weak gradient and weak divergence
For the convection–diffusion problem (1) with non-homogenous Dirichlet boundary condition (2), the corresponding variational form is given by seeking \(u\in H^1(\Omega )\) satisfying \(u|_{\partial \Omega }=g\) and
where \(H_0^1(\Omega )\) is the subspace of \(H^1(\Omega )\) consisting of functions with vanishing value on \(\partial \Omega \).
The key in MWG-FEMs is the use of new discrete weak derivatives in the place of strong derivatives and weak divergences in the place of strong divergence in the variational form for the underlying partial differential equations. For the model problem (4), the gradient \(\nabla \) is the principle differential operator involved in the variational formulation. Thus, it is critical to define and understand discrete weak gradients for the corresponding numerical methods. Following the idea originated in [11], the new discrete weak gradient is given by approximating the strong gradient operator with piecewise vector-valued polynomial functions and the weak divergence is given by approximating the strong divergence operator with piecewise polynomial functions; details are presented in the rest of this section.
Let \(\mathcal {T}_h\) be a partition of the domain \(\Omega \) consisting of polygons. Denote by \(\mathcal {E}_h\) the set of all edges in \(\mathcal {T}_h\) and by \(\mathcal {E}_h^0=\mathcal {E}_h\backslash \partial \Omega \) the set of all interior edges. For each element \(K\in \mathcal {T}_h\), we denote by \(h_K\) its diameter and mesh size \(h=max_{K\in \mathcal {T}_h}h_K\) for \(\mathcal {T}_h\).
All the elements of \({\mathcal T}_h\) are assumed to be closed and simply connected polygons. We need some shape regularity for the partition \({\mathcal T}_h\) described as follows (see [7] for more details).
- A1 :
-
There exists a positive constant \(\Theta \) such that for every element \(K\in T_h\) and each edge \(e\) of \(K\), one can define an irregular pyramid \(P(e)\subseteq T\) with base \(e\) and apex \(V_e\in K\), such that the height of \(P(e)\), denoted by \(H_{K,e}\), satisfies
$$\begin{aligned} H_{K,e}\ge \Theta h_K. \end{aligned}$$ - A2 :
-
There exists a positive constant \(N\) such that for every element \(K \in T_h\), it has at most \(N\) edges.
- A3 :
-
The convex hull of each \(K\in T_h\), denoted by \(S_K\), is contained in \(\bar{\Omega }\), the closure of \(\Omega \). Further more, each convex hull intersects with only a fixed and small number of convex hulls of other polygons in \(T_h\).
We define \(V_h\), for \(k\ge 1\), as follows
where \(P_k(K)\) is the set of polynomials defined on \(K\) with degree no more than \(k\). Based on \(V_h\), we define \(V_h^0\) as a subspace of \(V_h\) with zero boundary value, i.e.,
We also introduce a scalar polynomial space \(W_h\)
and a vector valued space \(G_h\)
For each \(v\in V_h^0\), if \(K_i,\,i=1,2\), are two elements with a common edge \(e\), and unit outward normal vectors \(\mathbf{n}_i,\,i=1,2,\) across \(e\), the average and jump of \(v\) across \(e\) are denoted by \(\{\{v\}\}=(v|_{K_1}+v|_{K_2})/2\) and
For each element \(K\in \mathcal {T}_h\), denote by \(\mathcal {Q}_h\) the local \(L^2\)-projection onto \(G_h\), i.e., for any vector valued function \(\mathbf{w}(x)\), \(\mathcal {Q}_h\mathbf{w}(x)\) satisfies
where \(G_{k-1}(K):=[P_{k-1}(K)]^2\). Denote by \(Q_h\) the local \(L^2\) projection from \(L^2(K)\) to \(P_k(K)\).
Definition 2.1
Given a partition \(\mathcal {T}_h\) of \(\Omega \) and a piecewise smooth function \(v\), we define the weak gradient of \(v\) on \(K\), \(\forall K\in \mathcal {T}_h\), as \(\nabla _w v\in G_h\), such that
where \(\mathbf{n}\) is the unit outward normal to \(\partial K\).
Remark 2.1
First, note that the definition for \(\nabla _w\) here is different from the one defined in [11]. Second, when \(v\) is continuous in \(\Omega \), \(\{\{v\}\}=v\) on \(\partial K\), \(\forall K\in \mathcal {T}_h\). Thus from the definition of \(\nabla _w\),
that is to say, the weak gradient \(\nabla _w v\) is actually the same as \(L^2\) projection of the traditional gradient \(\nabla v\) for such a \(v\). Thus if \(v\in P_k(\Omega ), \nabla _w v=\nabla v\).
Definition 2.2
Given a partition \(\mathcal {T}_h\) of \(\Omega \) and a piecewise smooth vector-valued function \(v\), we define the weak divergence of \(v\) on \(K\), \(\forall K\in \mathcal {T}_h\), as \(\nabla _w\cdot v\in W_h\), such that
where \(\mathbf{n}\) is the unit outward normal to \(\partial K\).
Remark 2.2
When \(v\) is continuous in \(\Omega \), \(\{\{v\}\}=v\) on \(\partial K\), \(\forall K\in \mathcal {T}_h\). Thus from the definition of \(\nabla _w\cdot \),
that is to say, the weak divergence \(\nabla _w\cdot v\) is actually the same as \(L^2\) projection of the traditional divergence \(\nabla \cdot v\) for such a vector-valued function \(v\). Thus if \(v\in [P_k(\Omega )]^2, \nabla _w\cdot v=\nabla \cdot v\).
Example 1
Let \(K\) is a triangular element \(\triangle ABC\), whose nodes are \(A(0,0),\;\) \(B(1,1),\;\) \(C(0,\;1),\,\) and \(\,\overline{AB}=e_1\), \(\overline{BC}=e_2\), \(\overline{CA}=e_3\). It is easy to know that \(\mathbf{n}_1= \left( \dfrac{1}{\sqrt{2}},-\dfrac{1}{\sqrt{2}} \right) \), \(\mathbf{n}_2=(0,1)\), \(\mathbf{n}_3=(-1,0)\). Suppose \(u|_K=(1,1);\; u=0,\; x\in \Omega /K\). It is not hard to derive \(\{\{u\}\}|_{e_i}= \left( \dfrac{1}{2},\;\dfrac{1}{2} \right) ,\;(i=1,2,3)\).
-
(1)
When we choose \(k=1\), \(\nabla _w\cdot u|_K=a\in P_0(K), K\in \mathcal {T}_h\). We have
$$\begin{aligned} \begin{array}{ll} \dfrac{a}{2}=(\nabla _w\cdot u,\;1)_K&{}=-(u,\;\nabla 1)_K+\sum \limits _{i=1}^3{\langle }\{\{u\}\},\; n{\rangle }_{e_i}\\ &{}=0+\displaystyle \int \limits _{e_1}0\text{ d }s+\dfrac{1}{2}\displaystyle \int \limits _{e_2}1\text{ d }s-\dfrac{1}{2}\displaystyle \int \limits _{e_3}1\text{ d }s\\ &{}=0. \end{array} \end{aligned}$$So \(a=0\), and thus \(\nabla _w\cdot u=0 \).
-
(2)
When we choose \(k=2\), \(\nabla _w\cdot u|_K=a+bx+cy\in P_1(K)\). We have
$$\begin{aligned}&{\begin{array}{ll} \dfrac{a}{2}+\dfrac{b}{6}+\dfrac{c}{3}=\displaystyle \int _{0}^{1}\int _{x}^1(a+bx+cy)\text{ d }y\text{ d }x=(\nabla _w\cdot u,\;1)_K=0\\ \end{array}}\\&{\begin{array}{ll} \dfrac{a}{6}+\dfrac{b}{12}+\dfrac{c}{8}=\displaystyle \int _{0}^{1}\int _{x}^1(ax+bx^2+cxy)\text{ d }y\text{ d }x=(\nabla _w\cdot u,\;x)_K\\ \qquad \qquad \qquad \quad =-\displaystyle \int _{0}^{1}\int _{x}^1 1\text{ d }y\text{ d }x+\int \limits _{e_1}\dfrac{1}{2}u|_{e_1}\cdot x\mathbf{n}_1\text{ d }s+\int \limits _{e_2}\dfrac{1}{2}u|_{e_2}\cdot x\mathbf{n}_2\text{ d }s\\ \qquad \qquad \qquad \qquad +\displaystyle \int _{e_3}\dfrac{1}{2}u|_{e_3}\cdot x\mathbf{n}_3\text{ d }s=-\dfrac{1}{4} \end{array}}\\&{\begin{array}{ll} \dfrac{a}{3}+\dfrac{b}{8}+\dfrac{c}{4}=\displaystyle \int _{0}^{1}\int _{x}^1(ay+bxy+cy^2)\text{ d }y\text{ d }x=(\nabla _w\cdot u,\;y)_K\\ \qquad \qquad \,\,\qquad =-\displaystyle \int _{0}^{1}\int _{x}^1 1\text{ d }y\text{ d }x+\int \limits _{e_1}\dfrac{1}{2}u|_{e_1}\cdot y\mathbf{n}_1\text{ d }s+\int \limits _{e_2}\dfrac{1}{2}u|_{e_2}\cdot y\mathbf{n}_2\text{ d }s\\ \qquad \qquad \qquad \quad +\displaystyle \int _{e_3}\dfrac{1}{2}u|_{e_3}\cdot y\mathbf{n}_3\text{ d }s=-\dfrac{1}{4} \end{array}} \end{aligned}$$So \(a=6,\;b=-6,\;c=-6\), and thus \(\nabla _w\cdot u=6-6x-6y\).
3 MWG-FEMs and some lemmas
In finite element methods, mesh generation is a crucial first step in the algorithm design. For the usual finite element methods [4, 6], the meshes are mostly required to be simplices: triangles or quadrilaterals in two dimensions and tetrahedra or hexahedra in three dimensions, or their variations known as isoparametric elements. Our MWG-FEM is designed to be sufficiently flexible so that general meshes of polytopes (e.g., polygons in 2D) are allowed. For simplicity, we shall refer to the elements as polygons in the rest of the paper.
Now we introduce two bilinear forms on \(V_h\) as follows:
where \(\rho >0\) is a constant-valued parameter without the need of being “large enough”. In practical computation, one might set \(\rho =1\). Denote by \(a_s(\cdot ,\;\cdot )\) a stabilization of \(a(\cdot ,\;\cdot )\) given by
Remark 3.1
Note that the stabilization term \(s(w,\; v)\) here is different from the one defined in [11].
3.1 Modified weak Galerkin algorithm
A numerical approximation for (1) and (2) can be obtained by seeking \(u_h\in V_h\) satisfying both \(u_h|_{\partial \Omega }= g_I\) on \(\partial \Omega \) and the following equation:
where \(g_I\) is an approximation of the Dirichlet boundary value in the polynomial space \(P_k(\partial T\cap \partial \Omega )\). For simplicity, one may take \(g_I\) as the standard \(L^2\) projection of the boundary value \(g\) on each boundary segment.
Now, we introduce a norm in \(V_h\) as follows
Lemma 3.1
Let \(K\in \mathcal {T}_h\) and \(e\in \partial K\). For any function \(w\in G_h\) and \(v\in L^2(\Omega )\), \(v|_{K}\in C^1(K)\),
Proof
From the definition of \(\nabla _w\) and integration by parts, for each \(K\in \mathcal {T}_h\), we have
and
So,
where \(v_1, w_1\) are the values of \(v, w\) restricted to element \(K\) and \(v_2\) is the value of \(v\) restricted in \(K\)’s adjacent elements. Summing up the identities over all \(K\in \mathcal {T}_h\) yields,
\(\square \)
Lemma 3.2
Let \(K\in \mathcal {T}_h\). For any function \(v\in V_h^0\),
Proof
From the definition of weak divergence \(\nabla _w\cdot \), for \(v\in V_h^0\), we have
We are now in a position to establish the uniqueness and existence for the solution of MWG-FEM (15). It suffices to prove that the solution is unique. To this end, we let \(f\,=\,g\,=\,0\).
Lemma 3.3
The modified WG finite element scheme (15) has a unique solution.
Proof
Taking \(v=u_h\in V_h^0\) in (15) and using Lemma 3.2 gives
combining this with (3) implies that \( s(u_h,u_h)=0, \) and \( (a\nabla _wu_h,\;\nabla _wu_h)=0. \) Thus \(u_h\) is continuous in the whole domain \(\Omega \). Therefore \(\nabla _wu_h=\nabla u_h=0\). Thus we have \(u_h=C\) in \(\Omega \). Note \(u_h=0\) on \(\partial \Omega \), we can complete the proof of this lemma.\(\square \)
The following lemma provides some estimates for the projection operators \(Q_h\) and \(\mathcal {Q}_h\). Observe that the underlying mesh \({\mathcal T}_h\) is assumed to be sufficiently general to allow polygons. A proof of the lemma can be found in [7, 12]. It should be pointed out that the proof of the lemma requires some non-trivial technical tools in analysis, which have also been established in [7, 12].
Lemma 3.4
Let \({\mathcal T}_h\) be a finite element partition of \(\Omega \) satisfying the shape regularity assumptions A1–A3. Then, for any \(\phi \in H^{k+1}(\Omega )\), we have
Here and in what follows of this paper, \(C\) denotes a generic constant independent of the mesh size \(h\) and the functions in the estimates.
Let \(K\) be an element with \(e\) as an edge. For any function \(\varphi \in H^1(K)\), the following trace inequality has been proved to be valid for general meshes satisfying A1–A3 (see [7, 12] for details):
Using (21), we can obtain the following estimates.
Lemma 3.5
Assume that \(\mathcal {T}_h\) is shape regular. Then, for any \(w\in H^{k+1}(\Omega )\) and \(v\in V_h\), We have the following relation
and
Proof
Using the definition of \(Q_h\), trace inequality (21), Lemma 3.4, and \([[w]]=0\) for \(w\in H^{k+1}(\Omega )\), we have
Similarly, it follows from (21) and Lemma 3.4
This completes the proof of Lemma 3.5.\(\square \)
4 Error analysis
The goal of this section is to establish some error estimates for the MWG finite element solution \(u_h\) arising from (15). The error will be measured in two natural norms: the triple-bar norm as defined in (16) and the standard \(L^2\) norm. The triple bar norm is essentially a discrete \(H^1\) norm for the underlying weak function.
4.1 Error equation
For simplicity of analysis, we assume that the coefficient tensor \(a\) in (1) is a piecewise constant matrix with respect to the finite partition \(\mathcal {T}_h\). The result can be extended to variable tensors without any difficulty, provided that the tensor \(a\) is piecewise sufficiently smooth.
Lemma 4.1
Let \(u_h\in V_h\) be the MWG finite element solution of the problem (1, 2) arising from (15). Assume the exact solution \(u\in H^{k+1}(\Omega )\). Then, there exists a constant \(C\) such that
Proof
Let \(\phi \in H^1(\Omega )\) and \(v\in V_h\) be any finite element function. It follows from the definition of the divergence (13), the definition of the discrete weak gradient (11), and the integration by parts that
and
Testing (1) by using \(v\in V_h^0\) we arrive at
Letting \(\phi =u\) in (27) and (28), combining (27), (28), and (29), we have that
Subtracting (15) from (30) yields the following error equation
We have used the fact \([[u]]=0\) for the true solution \(u\).
Denote \(\theta =u-u_h\) and \(\rho =u-Q_hu\). Let \(v=Q_hu-u_h\) in (31), we have
and
Obviously, we have
and
Note that
We have
So, we obtain
Using trace inequality and Cauchy-Schwartz inequality, we can get
Using \(\mathfrak {a}\mathfrak {b}\le \epsilon \mathfrak {a}^2+\dfrac{1}{\epsilon } \mathfrak {b}^2\), it is not hard to get
\(\square \)
Corollary 4.1
Let \(u_h\in V_h\) be the MWG finite element solution of the problem (1, 2) arising from (15). Assume that the exact solution \(u\in H^{k+1}(\Omega )\). Then, there exists a constant \(C\) such that
Proof
From triangle inequality, we have
This completes the proof. \(\square \)
4.2 Error estimates
The error equation (32) can be used to derive the following error estimate for the MWG finite element solution.
To obtain an error estimate in the standard \(L^2\) norm, we consider a dual problem that seeks \(\Phi \in H_0^1(\Omega )\bigcap H^2(\Omega )\) satisfying
Assume that the usual \(H^{2}\)-regularity is satisfied for the dual problem. This means that there exists a constant \(C\) such that
where \(\theta =u-u_h\).
Theorem 4.1
Let \(u_h\in V_h\) be the MWG finite element solution of the problem (1, 2) arising from (15). Assume that the exact solution \(u\in H^{k+1}(\Omega )\) and the dual problem (39) has the usual \(H^2\)-regularity (40). Then, there exists a constant \(C\) such that
Proof
By testing (39) with \(\theta \) we obtain
Here, we have used
Letting \(v=Q_h\Phi \) in (31) yields
Substituting (43) into (42) arrives at
Let us bound the terms on the right hand side of (44) one by one. Using the Cauchy-Schwarz inequality, the definition of \(s(\cdot ,\cdot )\), and (26), we obtain
and
From the trace inequality (21) and the estimate (19) we have
and
and
Using the Cauchy-Schwarz inequality, we obtain
and
Substituting all of estimates to \(R_i,\;i=1,2,\cdots , 8\) into (44) yields
Thus,
which implies (41). This completes the proof.\(\square \)
Theorem 4.2
Let \(u_h\in V_h\) be the MWG finite element solution of the problem (1, 2) arising from (15). Assume that the exact solution \(u\in H^{k+1}(\Omega )\). Then, there exists a constant \(C\) such that
Proof
It follows from Corollary 4.1
(47) and (41) imply (46). This completes the proof.\(\square \)
5 Numerical experiment
In this section, we will report several numerical results for the MWG finite element methods. For simplicity, we consider \(b=(1,1)^T\) and \(c=1\), \(a=1, 0.01, 0.0001\), and a rectangular domain \(\Omega =[0,1]\times [0,1]\) with uniform triangulation in this section. The triangular mesh is constructed by: 1) uniformly partitioning the domain into \(N\times N\) sub-rectangles; 2) dividing each rectangular element by the diagonal line with a negative slop. Denote the mesh size by \(h=1/N\).
All the numerical experiments are conducted by using linear weak Galerkin elements (\(k=1\)) in the finite element space \(V_h\). In this case, \(u_h\) is a combination of piecewise linear functions.
Let \(u_h\) and \(u\) be solutions to the MWG equation and the original equation, respectively. Denote \(e_h=u-u_h\). The accuracy and efficiency will be examined in the following tests. The following norms will be measured in all the numerical experiments:
Discrete \(H^1\) norm: \({|||} e_h{|||}=\left\{ \sum \limits _{K\in \mathcal {T}_h} \left( \int _K|\nabla _w e_h|^2\text{ d }x+h^{-1}\int _{\partial K}|[[e_h]]|^2\text{ d }s \right) \right\} ^{1/2}\).
Element-based \(L^2\) norm: \(\Vert e_h\Vert =\left\{ \sum \limits _{K\in \mathcal {T}_h}\int _K|e_h|^2\text{ d }x\right\} ^{1/2}\).
5.1 Homogeneous boundary cases
First, we consider two homogeneous boundary cases, i.e., \(g=0\).
Example 5.1.1
Let the analytical solution to (1) be \( u=x(1-x)y(1-y). \)It is easy to derive \(f\) by the above \(u\). Tables 1 and 2 show the convergence rate for MWG solutions measured in discrete \(H^1\) norm and element-based \(L^2\) norm on triangular meshes. The numerical results indicate that the MWG solution is convergent with rate \(O(h)\) in \(H^1\) and \(O(h^2)\) in \(L^2\) norms, which are same as the theoretical results shown in Theorems 4.2 and 4.1.
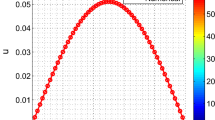
Example 5.1.2
Again, using the same meshes and elements as those used in Example 5.1.1, and the analytical solution is \(u=\sin (\pi x)\sin (\pi y)\). In this test, the error profiles are presented in Tables 3 and 4, which show an convergence rate of optimal order in \(H^1\) and \(L^2\) norms.
5.2 Nonhomogeneous boundary cases
In this subsection, we will test (1) with nonhomogeneous boundary condition.
Example 5.2.1
The analytical solution is \(u=x+\exp (x+y)\), which is not zero on \(\partial \Omega \). From Tables 5 and 6, we can see that the MWG solution is also convergent with rate \(O(h)\) in \(H^1\) and \(O(h^2)\) in \(L^2\) norms, which are same as the theoretical results shown in Theorems 4.2 and 4.1.
All the three numerical examples given above are in good agreement with the theoretical analysis in Sect. 4, which demonstrate that the MWG-FEM (15) is accurate and robust.
6 Conclusion
We developed an MWG-FEM for two-dimensional convection–diffusion problems in this paper. From experiments and analyses, we can see that the proposed MWG-FEM is very efficient and successful for solving convection-diffusion problems. It has high-order accuracy for the problems with small diffusion and large local Peclets numbers. The important feature of the method is that we introduce a modified weak gradient and weak divergence, and a new stabilization term without the need of being “large enough” constant-valued parameter. The algorithm of this MWG-FEM can be extended to three and higher dimensional convection–diffusion problems with more general boundary conditions. However, we do not consider using a upwinding technique to handle the convection term over the non-standard grid in the present framework of MWG-FEMs and we will consider this idea in the oncoming works.
References
Aziz, K., Settari, A.: Petroleum Reservoir Simulation. Applied Science Publisher Ltd., London (1979)
Bear, J.: Dynamics of Fluids in Porous Media. American Elsevier Publishing Company, New York (1972)
Brenner, S., Scott, R.: The Mathematical Theory of Finite Element Methods. Springer-Verlag, New York (1994)
Brezzi, F., Fortin, M.: Mixed and Hybrid Finite Elements. Springer-Verlag, New York (1991)
Brezzi, F., Douglas Jr, J., Marini, L.D.: Two families of mixed finite elements for second order elliptic problems. Numer. Math. 47, 217–235 (1985)
Ciarlet, P.G.: The Finite Element Method for Elliptic Problems. North-Holland, New York (1978)
Mu L., Wang X., Wang Y.: Shape regularity conditions for polygonal/polyhedral meshes, exemplified in a discontinuous Galerkin discretization. Numer. Methods. Partial. Differ. Equ. (2014). doi:10.1002/num.21905
Raviart, P., Thomas, J.: A mixed finite element method for second order elliptic problems. In: Galligani, I., Magenes, E. (eds.) Mathematical Aspects of the Finite Element Method. Springer-Verlag, New York (1977). [Lectures Notes in Math. 606]
Wang, X., Malluwawadu, N.S., Gao, F., McMillan, T.C.: A modified weak Galerkin finite element method. J. Comput. Appl. Math. 271, 319–327 (2014)
Wang, H., Liang, D., Ewing, R.E., Lyons, S.L., Qin, G.: An approximation to miscible fluid flows in porous media with point sources and sinks by an Eulerian-Lagrangian localized adjoint method and mixed finite element methods. SIAM J. Sci. Comput. 22, 561–581 (2000)
Wang, J., Ye, X.: A weak Galerkin finite element method for second-order elliptic problems. J. Comput. Appl. Math. 241, 103–115 (2013)
Wang, J., Ye, X.: A weak Galerkin mixed finite element method for second-order elliptic problems. Math. Comp. 83, 2101–2126 (2014)
Acknowledgments
The authors would like to sincerely thank Professor Xiu Ye in Arkansas University at Little Rock, USA, for her invaluable suggestions. The first author’s research is partially supported by the Natural Science Foundation of Shandong Province of China Grant ZR2013AM023 and NSAF Grant No. U1430101.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Gao, F., Wang, X. & Mu, L. A modified weak Galerkin finite element methods for convection–diffusion problems in 2D. J. Appl. Math. Comput. 49, 493–511 (2015). https://doi.org/10.1007/s12190-014-0850-x
Received:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12190-014-0850-x