
Abstract
Drilling engineering is technology-intensive and involves many subjects and large amounts of data. To improve the quality of production and management, decisions need to be made based on the latest data to direct the work on-site. Therefore, it is necessary to establish a safe, reliable, and efficient drilling management system that can meet daily production requirements. In this study, we describe a real-time monitoring system of field data. The system comprises real-time collection of borehole drilling parameters, ground drilling parameters, on-site video and borehole position data, and wireless data transmission to site and rear managers. The system is based on real-time monitoring of field data, the recognition and prediction of the conditions inside the borehole, the wireless transmission of data, and rear-base data analysis and feedback modules. The rear managers can view the real-time and historical drilling data at any time and compare and analyze drilling data by using the rear software of the management system to optimize the drilling program and feedback to the site. The application of the management system in production suggests that it can significantly improve drilling efficiency, reduce drilling costs and accidents in wells, and improve the automation of drilling operations. Moreover, at the same time, it can also predict complex conditions and drilling accidents in time and provide reliable real-time data to drilling technicians for on-site decision making.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Drilling engineering is high-input, high-risk, capital-intensive, technology-intensive systems engineering, involving large amounts of data (Aarsnes et al. 2016). Information technology in drilling engineering comprises the remote transmission of data of engineering and geological parameters to and from the base (Chernyi 2016). In recent years, with the rapid development of computer technology and network and communication technology, we can construct efficient information network systems (La 2001). Drilling engineering information technology has attracted the attention of major oil companies, which established drilling analysis and command centers based on computer network systems and satellite communication technology (Zaikin et al. 2016). Since the end of the twentieth Century, Chinese companies began to construct drilling data management system applications; nevertheless, these systems are not as advanced as foreign drilling information systems (Huang et al. 2004; Zhang et al. 2015). We introduce a modern drilling management system based on the real-time collection and wireless transmission of downhole and ground parameters, and its application to production practice.
Drilling parameter acquisition
Real-time acquisition of drilling parameters is the basis of the drilling management system that consists of the acquisition of ground drilling parameters, borehole parameters, and field video captures (Tian et al. 2014). The acquisition of ground drilling parameters is divided into the rig and mud system modules. The rig module uses six pressure sensors, three hall sensors, and an incremental encoder to acquire the drilling depth, weight on bit (WOB), rotating speed (RPM), torque, power, and rate of penetration (ROP). The mud system module uses a pressure sensor, a hall sensor, a temperature sensor, an ultrasonic liquid level sensor and a reed liquid level meter, and the real-time acquisition of the pump volume and pump pressure, the outlet drilling fluid flow, and mud pool level. Eleven ground drilling parameters are collected directly by the sensors or calculated based on data from the sensors (Yang 2010).
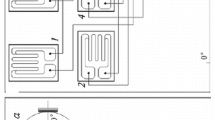
In addition to the real-time acquisition of ground drilling parameters, the system also collects drilling parameters at the bottom of the borehole by electromagnetic measurements while drilling (EM-MWD). The collected parameters at the bottom of the hole include the drilling fluid pressure and temperature, the well deviation angle, the azimuth angle, and the tool orientation angle (Descamps et al. 2013). These measured parameters are transmitted wirelessly to the ground in real-time by EM-MWD. In addition, the system also performs on-site video acquisition for the benefit of the rear managers. The main system sensors and the online system are shown in Figs. 1 and 2.

Main sensors used in drilling management system

Diagram of the drilling management system
Identification and prediction of in-well accidents
In addition to the real-time acquisition of on-site drilling parameters, the system also identifies the current working conditions and analyzes the on-site data to predict drilling accidents. The following types of conditions are typically identified (Wang et al. 2012).
-
(1)
Burning of bits: Burning of drill bits mainly refers to the diamond bits that are damaged owing to the high working temperatures. In this case, the pump pressure, torque rise, and the data fluctuation intensify, the ROP increases slightly and then decreases sharply, and the WOB curve fluctuates violently.
-
(2)
Breaking of rods: Breaking of rods occurs when the drill pipes or joints crack and gradually expand. When this happens, the pump pressure gradually decreases with time. When a drilling pipe breaks, there is generally a sudden change in the torque curve, and the pump pressure decreases significantly.
-
(3)
Jamming of drilling tools: Jamming of drilling tools occurs in long holes; consequently, the drilling rods cannot be lifted, decentralized, or rotated, the torque increases sharply, and the mean square deviation of the torque increases. Because of the increase in pump pressure, the ROP decreases until the torque reaches its upper limit.
-
(4)
Balled bits: Balled bits are rock powder or mud wrapped tightly around the drilling bits. This is also known as mudpack. When this happens, the torque increases, the pump pressure increases, the ROP suddenly drops, the drilling tools slightly bent, and the density of the return drilling fluid increases.
-
(5)
Leakage: This occurs when large amounts of drilling fluids are lost to the formation. When this happens, the pump pressure drops, the flow of the return drilling fluid decreases, and there is no return of drilling fluids.
-
(6)
Overflow: This occurs because of the high-pressure water and gas in the borehole. Consequently, the drilling fluid flow rate increases, the pump pressure increases, and the drilling fluid density decreases (Lee et al. 2014). Typical cases are listed in Table 1.
(Note: A is the sufficient diagnostic condition in all cases, angle 1 or 2 may be a single or the two can coexist; B: auxiliary judgment)
The system design is modular. It consists of the signal preprocessing module, the current working conditions recognition module, the future working conditions predicting module, the generating drilling parameter constraint conditions module, and the preliminary working conditions module. The signal processing and identification of the working conditions are shown in Fig. 3.
-
(1)
Signal preprocessing module

Flow chart of the system signal processing and case identification
The drilling parameter data are read by the multichannel data acquisition device, and the data are processed statistically to remove outliers.
-
(2)
Initial cases identification module
Abnormal conditions need to be timely identified to take the appropriate actions. The current operations module and the future operations module require multiple and computationally costly mathematical operations. The preliminary identification module is first set up to quickly determine the drilling conditions in the hole. The module integrates the drilling data after pretreatment and assigns them to a typical working conditions table. After threshold assessment, the current conditions are given.
-
(3)
Typical cases identification module
The preprocessed drilling parameters are decomposed into wavelet coefficients and are assessed for coefficients larger than threshold values in the wavelet coefficients. If this is the case, this means that there is no abrupt change in the drilling parameters; that is, the working conditions of the drilling rig are normal. If it is not, the drilling parameters need to be decomposed, and the current operating conditions of the rig are obtained through statistical analysis.
-
(4)
Future cases identification module
The module uses the data processed by the working conditions identification module to establish the time series model, estimate the parameters, and predict the future development of the drilling parameters. The future working conditions are predicted based on the typical working conditions in the borehole.
-
(5)
Generating drilling parameter constraint conditions module
Base on the future working conditions and relevant theoretical algorithms, empirical formulas, and experience, the constraints of normal drilling are automatically generated, and alarms are set after assessing the drilling parameters.
The system uses mathematical methods, such as wavelet and time series analysis, to identify drilling accidents in the field. Combined with drilling technology theory, empirical equations, and experience, the system can accurately predict accidents. The following statistical analysis forms the basis for assessing the typical working conditions and predicting accidents in boreholes.
-
[i]
The predicted confidence interval (\( \overline{\mathrm{x}}\pm 3{\sigma}_{\mathrm{x}} \)) is 99%. If the measured values of the parameters fall beyond this range, then the drilling conditions are changed.
-
[ii]
Drillability index Pk = V/Pn; that is, feet per turn on unit WOB.
-
[iii]
The torque discrepancy coefficient \( A=\sqrt{\sum {\left(M-\overline{M}\right)}^2/m}/\overline{M} \); mean square error of the unit average torque.
-
[iv]
Relative rate of change B = (xi + 1 − xi)/xi.
-
[v]
Maximum deviation ratio \( C=\left({x}_{\mathrm{max}}-\overline{x}\right)/\overline{x} \).
-
[vi]
Minimum deviation ratio \( D=\left({x}_{\mathrm{min}}-\overline{x}\right)/\overline{x} \).
Here, \( \overline{\mathrm{x}} \) is the sample mean, and σx is the sample standard deviation. V is the penetration rate, Pk is WOB, n is the rotation speed, and A is the torque coefficient of dispersion. M is the torque. \( \overline{M} \) is the average torque. m is the number of samples. B is the rate of relative change. xi + 1 is the value of sample (i + 1), and xi is the value of sample (i). C is the maximum deviation ratio, xmax is the sample maximum, \( \overline{x} \) is the sample mean, D is the minimum deviation ratio, and xmin is the sample minimum (Paiva et al. 2017).
Field system software
The field system software is based on VC++ and uses a functional modular design. The main function modules comprise a graphics-processing module, a system settings module, a data management module, a data communication module, and the typical case identification module (Sawaryn et al. 2009). The system software includes a drop-down menu of File, View, Help, Data acquisition, Data operation, Wireless transmission, and System setting and five tabs of Real-time parameters, namely, Today parameters, Today parameters curves, History parameters, and History parameters curves.
The default access to the software main interface and real-time parameters is shown in Fig. 4. The interface displays the names of more than a dozen drilling parameters that the system can detect, including borehole depth, WOB, ROP, RPM, and others. Each drilling parameter name is followed by a small window for displaying the values of the drilling parameters in real time. Next to each window are the units of the drilling parameters.

Field system software interface
By clicking on the “Today parameters” tab, the interface shown in Fig. 5 is opened. The right-hand side of the window displays the drilling parameters for the day in tabular form. Each set of data is identified by serial number, date, time, and all the monitored drilling parameters. Every 3 s, a new set of data is acquired and added; that is, a new line is added at the bottom of the table, and the parameters are automatically saved.

Today parameters interface
By clicking on the “Today parameters curves” tab in the main interface menu, the interface in Fig. 6 is seen. The right side of the interface is divided into three zones, and each zone shows three parameters. The nine parameters are the drilling pressure, borehole depth, hanging weight (zone 1), pump pressure, pump volume and backflow of drilling fluid (zone 2), ROP, torque, and power head position (zone 3). The color of each curve is the same as its abscissa to distinguish the three curves in the same area. With time as the ordinate, the user can scroll down to view the nine parameters.

Current parameters interface
By clicking on the “History parameters” tab of the main interface menu, historical drilling data are displayed in tabular form. In addition, the system can also be adapted to the user by loading historical drilling data. The system not only displays and saves drilling data but also uses mathematical methods, such as wavelet analysis, to analyze the collected data; thus, various conditions in the borehole can be predicted. In the lower part of each tab, there is the prediction table. When the system makes a prediction, the interface will show the typical operating conditions. At the same time, the alarm connected with the terminal box will beep to remind the operator to take appropriate actions to avoid accidents.
Data wireless transmission
In addition to acquiring drilling data and video and borehole positions, the field system can also transmit the data wirelessly. The wireless transmitter is connected to a PC in the host box via the USB interface. The wireless data transmission function can be turned on and off by the system software (Fig. 7). On the basis of the distance of the data transmission, the system can achieve short- and long-range wireless transmission (Rolv et al. 2010).

Connection diagram of data remote transmission
Typically, the site office is far from the drilling field. Using handheld wireless receivers, field managers can see in real time the on-site drilling parameters while in the office. Real-time drilling parameters can be received over distances of up to 1.5 km with handheld wireless receivers for close-range wireless transmissions. The data remote wireless transmission allows for downloading in real time (Fei et al. 2016).
Rear management system
Rear managers can download the real-time data, see real-time construction videos, and check the borehole and ground drilling conditions, and real-time or historical drilling data. The rear management system is also based on VC++ (Hanni et al. 1994). The main interface of the system shows all the boreholes completed and under construction. Each borehole has a corresponding mark and code on the map. Clicking on the completed drill hole shows all drilling data and live video recordings of the borehole. By clicking on the borehole under construction, the user can view historical and real-time drilling data (Li et al. 2009).
In addition, the rear management system also includes a data comparison and a data optimization module. Consequently, rear managers can compare different drilling technologies. Thus, the optimal drilling method and drilling parameters are obtained. Then, rear managers can feed the data back to the production units. By using this modern drilling management system, the site unit can significantly improve the drilling efficiency, shorten the drilling period, and reduce the drilling cost.
Drilling management system application examples
This modern drilling management system has been applied in many mining areas in China with very good results. Borehole No. ZK43–1 in Rushan, Shandong, China, is shown as an example
-
(1)
Faucet tripping accident
To speed up drilling, on-site drilling crews work at night. Consequently, because of the light conditions, scene operators may not detect an accident. In this case, a rear manager was looking at the real-time drilling data and identified a problem (Fig. 8). The pump volume did not change, but the pump pressure suddenly flattened out. He suspected an accident, and after a telephone contact with the site staff, he found that the drilling fluid had spilled from the faucet but not into the drill pipe. In this case, the management system helped the site crew to find the accident in time and prevent the burning of a bit.

The curve of drilling parameters when the faucet is off
-
(2)
The cutting edge of the bit is broken
A manager used the software and found that the torque increased suddenly, the pump pressure and the WOB changed violently, and the ROP declined (Fig. 9). He suspected trouble in the borehole and informed the operator. The driller immediately stopped drilling, and the drill bit was found broken (Fig. 10).

Chart of the sudden change in drilling parameters

The picture of the broken drill bit
-
(3)
Pump pressure pipe blocked
In another case, the site manager found that, when the mud pump was running, the system software showed that the pump volume and pump pressure were not zero. However, when the mud pump was not running, the system software showed that the pump volume was zero, but the pump pressure was not zero (Fig. 11). He suspected that the mud pump or pump pressure gauge had failed. When the staff opened the mud pump, they found that the pad of the pump pressure transmission device was broken (Fig. 12), and the broken part had fallen into the pressure pipe, blocking the pump pressure pipe. After repairing and replacing the broken part, the pump pressure returned to normal.

Drilling parameters in the case of broken pad

Broken pump pad
-
(4)
Improved drilling efficiency
In addition to real-time logging and displaying of drilling parameters on the ground and the bottom of the borehole, the proposed drilling management system can compare and analyze drilling methods, parameters, and results from different boreholes. In mining areas, optimal drilling methods and drilling parameters were recommended by using the optimization module of the system based on the adjacent drilling data. Using the recommended drilling method and parameters, the overall drilling efficiency for ZK43–1 improved by 25%, and the drilling time was reduced by 15 days, reducing the drilling costs.
Conclusions
We described the application of a management system that combines advanced data acquisition and computer and network communication technology. The management system can provide real-time drilling data to site and back-office managers. The rear management system also includes modules for data comparison and optimization. By using these modules, the managers do not have to go to the drilling sites and can quickly integrate different drilling methods, parameters, and drilling data to provide feedback to the site crew.
The application of the system in practice suggests that it can significantly improve drilling efficiency, reduce drilling costs, reduce accidents in the well, and improve the automation of drilling operations. In addition, it can be used to predict drilling conditions and drilling accidents and provide reliable real-time data for on-site decisions by the drilling technicians.
References
Aarsnes UJ, Acikmese B, Ambrus A (2016) Robust controller design for automated kick handling in managed pressure drilling. J Process Control 47:46–57
Chernyi SG (2016) Improving performance of microprocessor network management platform for Ethernet systems drilling rigs. Instruments Syst Monit Control, and Diagn 1:2–10
Descamps F, Tshibangu JP, Silva N et al (2013) A database to manage rock mechanical properties and assess formation abrasiveness for drilling. Rock mechanics for resources, energy and environment ISRM International Symposium (EUROCK), pp 245–250, DOI: https://doi.org/10.1201/b15683-39
Fei GH, Wu XP, Li WR et al (2016) CMIMS: construction monitoring and information management system for drill and blast tunnels. J Rail Way Sci Eng 13(4):775–782
Hanni G, Chambers I, Quay W (1994) Brief-using a drilling management-system to build a learning organization. J Pet Technol 46(6):502–503
Huang ST, Wang SH, Han SY et al (2004) Management of drill hole data and automatic mapping system. Uranium Geol 20(1):51–55
La RD (2001) The development of an information management system for the improvement of drilling and blasting in mining operations. Computer applications in the minerals industries. 29th international symposium on computer applications in the minerals industries, pp 367-372
Lee SS, Kim KY, Shin HS et al (2014) Development of a 4D Information based Integrated Management System for Geothermal Power Plant Drilling Project. Tunnel Underg Space 24(3):234–242. https://doi.org/10.7474/TUS.2014.24.3.234
.Li Q, Chang D, Xu YZ et al (2009) Drilling risk management system based on knowledge integration. Acta Pet Sin 30(5):755–759
Paiva G, Agra R, Tomi GD (2017) Application challenges for information and automation technologies in an underground mine in Brazil. REM, Int Eng J 70(1):93–97. https://doi.org/10.1590/0370-44672015700117
Rolv R, Sven ID, Christine N et al (2010) Drilling a challenging HPHT well utilizing an advanced ECD management system with decision support and real time simulations. IADC/SPE 128648:1–12
Sawaryn SJ, Sanstrom B, McColpin G (2009) The management of drilling-engineering and well-services software as safety-critical systems. SPE Drill Complet 21(2):141–147
Tian M, Hu YB, Liu ZG et al (2014) Development of management information system of geo-drilling construction. International (China) Geological Engineering Drilling Technology Conference (IGEDTC) 73:118–126
Wang RW, Shuai CM, Yan Q (2012) Research on evaluation index system of HSE management for overseas oil drilling projects based on the cases of Daqing Oilfield overseas projects. J Safety Sci Technol 10(2):177–182
Yang DF (2010) Supervising and management system of drilling platform battery based on communication. Instrum Tech Sens 2:45–47
Zaikin IP, Kempf KV, Gorshenin VI et al (2016) Drilling management information system engineering experience at Zarubezhneft JSC. Oil industry 9:85–89
Zhang XX, Chen T, Zhang QY et al (2015) Research on management system of the grid emergency drill. 2nd International Conference on Complex Science Management and Education Science (CSMES), pp 93-100
Acknowledgements
The work was supported by the National Natural Science Foundation of China (No. 41572355) and by a research fund from the Engineering Research Center of Rock–Soil Drilling & Excavation and Protection, Ministry of Education, China University of Geosciences (Wuhan). The authors wish to thank Dr. Chun Sao, Master Jun Fang, and other colleagues for their help.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by: H. A. Babaie
Rights and permissions
About this article

Cite this article
Lu, C., Wu, X. & Wang, W. Modern drilling management system based on field data monitoring. Earth Sci Inform 11, 403–412 (2018). https://doi.org/10.1007/s12145-018-0336-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12145-018-0336-8