
Abstract
Since autonomous underwater vehicles (AUVs) are increasing popular in maritime applications, underwater wireless communication with multiple users is becoming more important and practical. In this paper, we investigate the resource allocation in underwater acoustic networks (UAN) with time division multiple access (TDMA) technique. When the uncertain channel state information (CSI) derived from the movement of AUVs in underwater environment is considered, probability constraints are introduced to guarantee the quality of service (QoS). A joint optimization algorithm is proposed, in order to schedule time for energy harvesting (EH) and wireless information transfer (WIT); the proposed algorithm also allocates transmit power to multiple AUVs to maximize the sum-throughput over a time period. The constraints of outage probability and available energy are both considered. The probability constraint is first transformed into an equivalent formulation. Furthermore, an approach with low computational complexity is proposed for power allocation and time assignment based on the residual energy of the buoy. In extensive simulation experiments, the proposed algorithm shows significant throughput increases in long term compared to baseline schemes, and better performance in terms of convergence and energy efficiency (EE) can be achieved.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Underwater acoustic networks (UAN) have attracted wide attention in recent years. UAN have many promising applications in various fields, including disaster warning, geological survey, and ecological protection [1]. However, there exist a series of challenges due to the inherent characteristics of underwater acoustic channel in practice. For an instance, UAN are vulnerable to high bit error rate, long propagation delay, and constrained power consumption [2].
UAN consist of sensors, autonomous underwater vehicles (AUVs), buoys, and other equipments. As an important role in UAN, AUV has become a mainstream option to perform underwater search, deep-sea detection, data collection etc [3]. With the increasing complexity of underwater missions, satisfying all requirements by a single AUV is becoming more and more challenging. Hence cooperative multiple AUVs are essential to conduct these complicated tasks [4, 5]. To effectively ensure accurate and timely operation, large amount of delay-sensitive cooperative control massages are required for a group of AUVs [3]. A sufficient data transmitting capacity is essential for the remote control of AUV network. However, throughput maximization technologies are not well discussed in the downlink (DL) networks, which tend to deliver control information from a central buoy to multiple underwater receivers.
Unlike the terrestrial counterpart, batteries to power up facilities in UAN are almost undesirable to recharge or replace. When multiple AUVs are deployed to carry out complicated missions simultaneously, a lot of time-sensitive control massages need to be transmitted to the AUVs. The battery of the buoy would be drained out quickly without an efficient supplement of energy. Although appropriately allocating power to maximize the transmitted information in limited energy benefits prolonging the network lifetime, EH, as a promising technology, is an sustainable source to power the buoy. In ideal environment, renewable energy in many sources can be harvested to recharge batteries, such as wind, solar, and water waves. However, network stabilities cannot be ensured if UAN devices only rely on the discontinuous and unpredictable energy acquired from ambient environment. Without power broadcast stations, all AUVs would be out of control once the energy harvester of the buoy is intensely affected by weather and other inevitable factors. Wireless power transmission is controllable and more reliable to supply energy for energy constrained devices. In order to improve the harvester steadiness and make full use of acquired energy, we attempt to solve the power allocation problem in a UAN with wireless energy transfer (WET).
In recent years, many researches have paid attention to the optimization problem for EH communication networks. An optimal time allocation method was proposed to maximize the sum-throughput in TDMA for all users, but power control was not addressed [6]. A novel joint optimization scheme for broadcasting power and time sharing was developed to maximize the network throughput, and better performance can be achieved compared to algorithms which only optimize time allocation [7]. Yang et al. [8] proposed an approach to minimize the energy consumption for TDMA cellular networks. Since the characteristic of EH is nonlinear, the minimization problem is transformed from nonconvex to an equivalent tractable one. To optimize cooperative networks with simultaneous wireless information and power transfer (SWIPT), a novel resource allocation and relay selection strategy were developed to maximize the overall system sum-rate [9]. Wang et al. [10] proposed an optimization framework with low time complexity to minimize the sum-power consumption. In these works, the “harvest then transmit” mechanism is implemented to use all energy acquired during the EH phase. However, emergency information and time-sensitive data cannot be transmitted at the highest rate if no energy is stored in the batteries [11, 12]. Therefore, the aforementioned mechanism cannot be directly implemented on underwater scenario with long propagation delay. In this paper, a novel scheme to regulate the EH time is proposed to update the battery conditions in a sequence of TDMA frames; hence, the change of channel state and energy consumption can be considered in resource allocations.
To improve the system performance of UAN, many schemes have been proposed. Liu et al. [13] proposed a scheme in order to prolong network lifetime, where the scheme is enhanced with three heuristic algorithms to initially deploy relay nodes (RNs), execute flow adjustment, and move certain RN to a proper depth. Wang et al. [14] proposed an enforcement learning approach to maximize long-term sum rate in a relay-assisted underwater networks with EH. In order to increase the network operation time, the analytical solution of a least-square problem was obtained for optimizing the link-layer network flow, where transmission delay of underwater acoustic channel was also considered [15]. When noise attenuation in deep water is considered, an EE tree was established to reduce energy consumption and improve robustness of UAN [16]. Jing et al. [17] studied the throughput maximization for an underwater network with energy-harvesting-powered nodes, where both timely and delayed CSI feedback were take into consideration. When power and throughput constrains are considered, partial CSI feedback was introduced into a power and bit loading algorithm to reduce bit error rate for an orthogonal frequency-division multiplexing (OFDM) DL network [18]. Song et al. [19] proposed an approach to optimize the the power from base station (BS) and time allocation in order to maximize the sum rate and EE in relay-aided DL UAN. Prasad et al. [20] proposed a joint optimization for relay placement and power allocation to minimize outage probability in single-DF-relay UAN. Most of the existing approaches only formulated the problem with the perfect CSI, but outage probability of underwater acoustic communication has attracted less attention. It is impractical to use a fixed channel gain in a period of time for the real underwater environment [21].
In this paper, we attempt to maximize the long-term throughput in the DL of a multiuser UAN with WET, while the outage probability is considered for the robust optimization. At each time block, the RN establishes a balance between the time allocated for EH and for WIT. If the time assigned to harvest energy is too long, the buoy is likely to have enough energy stored in the battery. However, the overall throughput are not always increased when the available power increases, since the time used for WIT is short. On the contrary, if most of the time is used to transmit information, the remaining energy is insufficient to support reliable transmission, and the network throughput is reduced. Since the network performance is impaired by both the overflow and overuse of batteries, we propose a joint approach incorporating time allocation optimization and underwater network power control, in order to maximize the throughput. The main contributions of this paper are summarized as follows:
-
An underwater wireless acoustic networks model is developed where the control unit (buoy) uses the TDMA acoustic channel to harvest energy and transmit information to AUVs. To maximize the sum-throughput, we propose the joint optimization scheme of time and power allocation at the buoy.
-
A farsighted but flexible strategy is proposed to allocate the time for EH based on the energy level. Hence, the buoy can rationally allocate energy used in future and avoid battery overflow and overuse. Thus the throughput is maximized by fully using all the assigned resource including power and time.
-
To guarantee the QoS of all users with uncertain underwater acoustic channels, an outage-based constraint is formulated in the optimization problem. Given the statistical characteristics of user movements, the introduced probability constraint is able to cope with the CSI uncertainty.
The rest of this paper is organized as follows. In Section 2, we introduce the system model. The problem formulation for throughput maximization of the overall network is presented in Section 3. Section 4 illustrates our proposed method for solving the optimization problem. Simulation results and conclusion are given in Sections 5 and 6, respectively. Some important symbols used in this article are given in Table 1.
2 System model
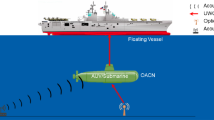
We consider the DL of an underwater wireless acoustic network with multiuser and single control unit as shown in Fig. 1. The network consists of N users (i.e., AUVs) which moves along their own trajectories and the network has only one surface node which is responsible for delivering message to AUVs and harvesting energy from a ship-located BS by using TDMA. The set of N users is denoted by \(\mathcal {N}=\{1,2,\cdots ,N\}\). The surface control unit is typically an ocean platform or a buoy and it is assumed that the node is located at a relatively fixed position. The central node is equipped with both radio and acoustic transceiver for communicating with the mobile BS and transmitting control information to underwater nodes, respectively. Note that the buoy does not have any other extra energy sources despite the wireless power transmission from the BS, whereas the mobile BS employs a stable and sufficient power supply. To avoid over-complication, we consider a full data buffer of which the buoy is assumed to have enough information to be sent.

System model
As shown in Fig. 2, each TDMA frame, denoted by T, is split into N + 1 slots. The duration of each slot is τiT,i = 0,1,2,⋯ ,N, with \({\sum }_{i=0}^{N}\tau _i=1\). The RN has a rechargeable battery with capacity \(E_{\max \limits }\) and some initial energy \(E_1^{\mathrm {R}}\) before the first frame T. In each block, the first time slot, τ0T, is assigned to RN for harvesting wireless energy broadcasted from BS, while the rest of time is equally divided into N slots (i.e., τ1 = τ2 = ⋯ = τN), during which the control unit transmits command information to AUVs sequentially to avoid the interference from each other. For the process of updating energy battery of the buoy, we define energy level, denoted by 0 < e < 1, as the ratio of energy stored in the battery to its capacity \(E_{\max \limits }\). Let 0 < β < 1 denote the fixed proportion of energy consumed for WIT to its current energy \(E_j^{\mathrm {R}}\), which is assumed to be known at the beginning of j th frame, j = 1,2,⋯ ,Q. Then, \(E_j^{\mathrm {R}}\) is updated as follows
where wj is the energy harvested by the buoy in τ0T at the j th frame. During the phase of WET in j th frame, xA denotes the baseband signal transmitted from the BS. xA is assumed to be an arbitrary complex random signal satisfying \(\mathbb {E}[|x_A|^2]=P_A\), where PA is the transfer power of the BS. We assume that PA is large enough to neglect the energy harvested due to ambient noise at the surface node, where the energy consumed by signal receiving and processing is also negligible. The received signal at the buoy is written as
where y and n are the received signal and noise at the buoy. For a linear energy harvester, the power received at the buoy can thus be expressed as
where 0 < ζ < 1 represents the EH efficiency at the buoy.

Frame structure for EH and WIT
Compared to the model used in terrestrial wireless communication, a significant property of acoustic channel is that a signal experiences not only spreading but also absorption loss, which is relevant to the signal frequency f. The overall attenuation over a distance l is given by [22]
where k represents the propagation geometry, whose usually used value is 1.5 for practical spreading. The absorption coefficient a(f) in dB/km for f in kHz is obtained by Thorp’s formula [23]
The power spectral density (PSD) of ambient noise in the ocean namely, N(f), is calculated as
where Nt(f),Ns(f),Nw(f),Nth(f) are the PSD of the turbulence noise, the distant shipping noise, the wind-driven waves noise, and the thermal noise, respectively. These noise, in dB re μ Pa per Hz as a function of f in kHz, can be modeled by the following empirical formulas [24]
Accordingly, one can calculate the narrow-band signal-to-noise ratio (SNR) of i th AUV as (8), when the acoustic signal frequency f, distance l0,i, and allocated transmit power Pi are given [25].
where Δf is a narrow band around the frequency f. According to [25], the available capacity associated with the i th user is
Each AUV is deployed randomly at a specified position in the ocean, where the distance to the buoy is ranged from 3 to 8 km. We presume that each AUV drifts in a fixed direction and speed until the end of current frame. The AUV moves towards a randomly selected direction at an updated velocity in the next T [26]. To guarantee the robustness of communication system, we further assume that the trajectory of each vehicle is in a straight line from the buoy to its own initial position. In other words, an AUV can only move either opposite or present direction for another N + 1 slots. The speed of the i th mobile AUV (i.e. |vi|) is uniformly distributed between \([V_{min},V_{\max \limits }]\) m/s [27].
3 Problem formulation
To maximize the throughput of the overall network within a finite time period of Q frames, we consider a joint optimization of time allocation and power control. In the underwater environment, perfect CSI is not always available at the transmitter due to the long delay caused by the slow sound speed [18]. To improve the reliability of underwater acoustic communication, an extreme condition is considered in this research. We assume that the AUVs can be located precisely by the central node only at the beginning of each T, and thus the position uncertainty is taken into account in our model. In other words, the power for data transmission is selected on the basis of the outdated location information, since the real-time CSI is unknown to the buoy. For each T, the total power that the buoy can provide for information transfer is denoted as \(P_{\max \limits }^{\mathrm {R}}\) which is defined as
where ER is the current energy of the buoy. To dynamically adjust the time for EH (i.e. τ0), the optimization is integrating with the energy which will be used in future into the problem, and thus the objective function is given by
where the overall throughput of N users is represented by the first term. The second term affects the time allocated for WET and subsequently the energy which will be used in future, where K is a positive weight factor which attempts to match the value of second term with the first term; the energy level of the buoy, e, is a ratio of residual energy of the buoy to its capacity. In other words, the time for WET can be adaptively assigned according to e. By utilizing the dynamic mechanism, more time is allocated for the information transfer when e increases, and conversely, the time for harvesting is longer when the buoy has less energy to be consumed in future. Compared with the fixed τ0, our proposed scheme can also avoid the battery overflow and overuse, which result in the reduction in throughput and potential energy waste.
Mathematically, the robust optimization problem to maximize the throughput over a specified period is formulated as
The availability of total power of the buoy is limited by \(P^{R}_{\max \limits }\) in Eq. 12b. To guarantee the QoS requirement of each user, a constraint based on outage probability is adopted in Eq. 12c, where 0 < ε < 1 is the outage probability threshold and Γi represents the minimal SNR which ensures the reliable decoding at user i. The instantaneous SNR in the move of an AUV is defined by \(\widetilde {\gamma _i}^{\mathrm {R}}\), and the outage probability caused by the uncertain directions and velocities of AUVs is constrained by Eq. 12c.
4 Joint resource allocation scheme
To solve the robust optimization problem, we first transform the probability constraint (12c) into a form with certainty. Then, a joint optimization algorithm is devised by introducing a dynamic scheme for τ0 and employing a novel method with low computational complexity.
4.1 Transformation of probability constraint
An outage-based probability constraint is used to ensure the QoS requirement; hereby which the problem cannot be solved directly [28, 29]. It is noteworthy that AUVs drift directions in our assumption imply the worst case of information transfer. If the power to satisfy (12c) meets the requirement of an AUV and the longest distance is ahead by the AUV direction, the signal can be correctly decoded by this user while the movement direction is not a constraint.
Since the velocity of AUV is much slower than sound speed, we presume that the movement of an AUV in the time slot τiT, i = 1,2,⋯ ,N, is negligible. Denote l0,i be the initial distance between the buoy and i th user at the beginning of each T; the real distance at τiT, i = 1,2,⋯ ,N, is denoted as li. In fact, the uncertainty of l0,i, which exists in an exponential function \(a(f)^{l_{0,i}}\), dictates the variation of \(l_{0,i}^{k}a(f)^{l_{0,i}}\). Accordingly, we only focus on the l0,i in \(a(f)^{l_{0,i}}\), and replace it by li. For simplicity, the outage probability in constraint (12c) is rewritten as
where the change of product \(l_{0,i}^{k}a(f)^{l_i}\) caused by the uncertainty of l0,i is ignored since this is an independent variable of power function. When the i th user is receiving information, its real distance from the buoy is calculated as
If li > l0,i, the i th AUV leaves the central node coverage; the transmit power calculated from l0,i may not satisfy the QoS requirement for this user in the real environment. Hence, the corresponding AUV should be removed from the set \(\mathcal {N}\). Replacing li in Eqs. 13 by 14, a new form of outage probability is represented as \(\text {Pr}\{v_i\leq \mathcal {V}_i\}\). \(\mathcal {V}_i\) is defined as the equivalent velocity and is given by
Since |vi| follows uniform distribution with the range of \([V_{min},V_{\max \limits }]\) m/s, the probability can be computed by
Finally, the constraint (12c) is converted as follows,
The optimization problem (P1) is reformulated as
4.2 Power allocation for the buoy
To maximize the throughput of the network, we propose Theorem 1.
Theorem 1
For a set with n communication pairs, the objective function of the i th pair is denoted as \(f_i(x_i)=\ln (1+x_i/F_i)\), where xi > 0 and Fi > 0. To satisfy the constraint that \(\sum\limits _{i=1}^{n}x_i=C\) with the constant C > 0, the overall objective function \(\sum\limits _{i=1}^{n}f_i(x_i)\) is maximal when Eq. 19 holds,
where the point (x1, x2,⋯ ,xn) is described as the equal-efficiency point in this paper.
Proof
See Appendix □
For the sake of simplicity, A(l0,i, f)N(f)Δf is denoted by Gi. Given a fixed τ0, maximizing U(Pi, τ0) is equivalent to maximizing \(\sum\limits _{i=1}^{N}g_i(P_i)\), where gi(Pi) is expressed as
Let r be an intermediate variable. Based on Theorem 1, the following relationship can be created,
Without the loss of generality, the power Pi is allocated to the i th user.
Note that when \(\sum\limits _{i=1}^{N} P_i=P_{\max \limits }^{\mathrm {R}}\), r can be calculated as
Substituting r into Eq. 22, the optimal power allocation for user i is
4.3 Optimal time allocation
Similarly, when the fixed Pi is given, the first and second order partial derivatives with respect to τ0 can be computed as
Since it is obvious that \(\frac {\partial ^2 U}{\partial \tau _0^2}<0\), U is concave to τ0. By setting \(\frac {\partial U}{\partial \tau _0}=0\), the time ratio for EH can be obtained by
Considering the physical meaning of τ0, the optimal τ0 can be determined by
where \((t)^+=\max \limits (0,t)\). The proposed approach to throughput maximization is detailed in Algorithm 1.

In Algorithm 1, most operations are included in checking if (17) is satisfied. For the most extreme case, the residual energy is too little to provide a reliable link to any one of the AUVs, then the algorithm is performed N times until all AUVs have been successively removed from the set \(\mathcal {N}\). Note that Pi and τ0 converge after I iterations, the overall computational complexity of the designed scheme is \(\mathcal {O}(N\cdot I)\).
5 Simulation results
In this section, we verify the effectiveness and evaluate the performance of the proposed throughput maximization algorithm in terms of the power control and time allocation. In the underwater wireless network, all AUVs are randomly deployed; the distance between the AUV and the surface node (buoy) varies from 3 to 8 km. It is set that typical speeds for AUVs ranges from 0.5 to 2.8 m/s [27]. The number of users and TDMA frames are set to N = 10 and Q = 5, respectively. In the simplest case, the minimal SNR at each user is assumed to be the same, i.e., Γ1 = Γ2 = ⋯ = ΓN = Γ. In this study, the carrier frequency f is set to 30 kHz, and bandwidth Δf is 1 kHz. The buoy has a rechargeable battery with capacity \(E_{\max \limits }=50\) J and the EH efficiency ζ is chosen to be 0.8. The results of network throughput and EE are averaged under Monte-Carlo simulations. Main parameters in the simulation are summarized in Table 2.
In Figs. 3 and 4, we investigate the convergence of Algorithm 1. Figure 3 illustrates that the power allocated to different users within a TDMA frame T gradually converges after seven iterations. Figure 4 shows the ratio of time assigned to WET (i.e. τ0) for the Q TDMA frames; this figure shows that the optimal result can be determined quickly after about five iterations. The steady state of τ0 depends on the buoy energy level. Both Figs. 3 and 4 reveal that our proposed algorithm requires small amount of time to converge. A decreasing trend of τ0 is shown in Fig. 5 when the energy level e increases. When the residual energy is in a lower level, longer time is allocated for EH to provide enough energy to be used in future and to increase the throughput in long term. On the contrary, a larger e lead to more time being used to data transmission in current T; the time for EH is thus reduced. This result further unveils the effectiveness of our designed adaptive regulation mechanism for τ0.

Power convergence of all users

EH time convergence among TDMA frames

Ratio of EH time with respect to energy levels
Given calculated \(P_{i}^{\ast }\), one should check if the outage probability constraint in Eq. 17 is satisfied. The actual outage probability of users are obtained by 10000 independent tests of which the distances are randomly generated between AUVs and the buoy. In Fig. 6, we plot the actual outage probability versus different thresholds, which are 0.1, 0.2, 0.3 and 0.4. Figure 6 also shows that the actual outage probability is always less than target value. This result demonstrates the robustness of our proposed scheme. Therefore, our designed algorithm is able to adapt dynamic and strict communication condition in the ocean. Figure 7 shows that fewer AUVs will be removed from the set, if more residual energy is available for WIT. It is because higher power can cover a wider range. A larger acceptable outage probability means lower threshold for an AUV to be connected to the buoy. Therefore, more AUVs can be accepted when ε is larger.

Outage probabilities from the buoy to users

Removal of users versus battery energy levels
Two variants are created as baselines to verify the effectiveness of our algorithm. Figure 8 compares our proposed algorithm with an equal power allocation scheme with a dynamic τ0. The simulation results that compare the policy in [19] with the strategy which is engaged with a invariable τ0 but power allocation is identical to those of our proposed method are also presented in Fig. 8. We observe that the system throughput of using our algorithm increases by rising the transfer power PA; since PA increases, more energy is available for information transfer, and time for EH is less and consequently throughput is larger. We also find that the throughput derived from our algorithm is lower than that achieved from the scheme with a fixed τ0 when PA has a small value, since more time is required to harvest energy in our algorithm. However, when our proposed power allocation method is not engaged with a flexible τ0, the system performance are seriously suffered with the invariable τ0 and network throughput cannot be improved with an increasing PA. It is note that our devised algorithm outperforms the strategy proposed in [19]. The reason is that our devised algorithm takes into account the throughput in current T and also that in next time periods, whereas τ0 is only determined by the updated acoustic channel state using the algorithm proposed in [19]. These phenomena reveal the advantage of variable τ0.

Network throughput with respect to the power broadcasted from BS
To further evaluate the EE of our proposed algorithm, Fig. 9 shows the system EE of our proposed method and that of other three strategies which can be treated as baselines. We find that the EE of our scheme is almost unchanged with the transmit power since larger PA brings more available energy and longer time for information transfer, which owing to the flexible τ0. This result also explains why another scheme with dynamic τ0 and equal power allocation has the same trend. In Fig. 9, we observe that for increasing values of transmit power, EE shows a decreasing trend when the algorithm proposed in [19] and the strategy with invariable τ0 are applied in the two tests. The reason is that τ0 cannot be effectively decreased to make full use of harvested energy for information transfer when the energy consumption increases. For the policy with a fixed τ0, the network EE first decreases with a larger PA and then saturates when PA is larger than 4 watts, since the battery is filled with energy due to sufficient power transfer. The overall throughput of our proposed algorithm always outperforms other three baseline schemes, although EE of our proposed algorithm is lower than that of the two baselines when PA is small.

System EE versus the power broadcasted from BS
6 Conclusion
In this paper, a resource allocation algorithm was designed to maximize the throughput in the DL of UAN. To guarantee the QoS requirements, we adopted an outage probability constraint and then transformed into a deterministic form. In this paper, a novel approach was proposed to solve the the joint resource optimization. The proposed approach is able to determine the optimal power allocation and the computational complexity is linear. The converted optimization problem was solved by jointly utilizing the proposed farsighted scheme for adaptively changing WET time and the novel approach for power allocation. Simulation results validated that the proposed strategy can effectively improve the system throughput and guarantee outage requirement in harsh underwater environment.
References
Al-Dharrab S, Uysal M, Duman TM (2013) Cooperative underwater acoustic communications. IEEE Commun Mag 51(7):146–153
Pompili D, Akyildiz If (2009) Overview of networking protocols for underwater wireless communications. IEEE Commun Mag 47(1):97–102
Lin C, Han G, Guizani M, Bi Y, Du J, Shu L (2020) An SDN architecture for AUV-based underwater wireless networks to enable cooperative underwater search. IEEE Wirel Commun 27(3):132–139
Li X, Zhu D (2018) An adaptive SOM neural network method for distributed formation control of a group of AUVs. IEEE Trans Ind Electron 65(10):8260–8270
Sahu BK, Subudhi B (2018) Flocking control of multiple AUVs based on fuzzy potential functions. IEEE Trans Fuzzy Syst 26(5):2539–2551
Ju H, Zhang R (2014) Throughput maximization in wireless powered communication networks. IEEE Trans Wirel Commun 13(1):418–428
Hadzi-Velkov Z, Nikoloska I, Karagiannidis GK, Duong TQ (2016) Wireless networks with energy harvesting and power transfer: joint power and time allocation. IEEE Signal Processing Letters 23 (1):50–54
Yang Z, Xu W, Pan Y, Pan C, Chen M (2018) Energy efficient resource allocation in machine-to-machine communications with multiple access and energy harvesting for IoT. IEEE Internet of Things Journal 5(1):229–245
Gautam S, Lagunas E, Chatzinotas S, Ottersten B (2019) Relay selection and resource allocation for SWIPT in multi-user OFDMA systems. IEEE Trans Wirel Commun 18(5):2493–2508
Wang S, Quan S, Liu X (2019) A novel power allocation scheme for multi-user single-DF-relay networks. Signal Process 159:13–19
Liu Y, Feng T, Peng M, Guan J, Wang Y (2021) DREAM: online control mechanisms for data aggregation error minimization in privacy-preserving crowdsensing. In: IEEE transactions on dependable and secure computing. https://doi.org/10.1109/TDSC.2020.3011679
Liu Y, Wang H, Peng M, Guan J, Wang Y (2021) An incentive mechanism for privacy-preserving crowdsensing via deep reinforcement learning. In: IEEE internet of things journal. https://doi.org/10.1109/JIOT.2020.3047105
Liu L, Ma M, Liu C, Shu Y (2017) Optimal relay node placement and flow allocation in underwater acoustic sensor networks. IEEE Trans Commun 65(5):2141–2152
Wang R, Yadav A, Makled EA, Dobre OA, Zhao R, Varshney PK (2020) Optimal power allocation for full-duplex underwater relay networks with energy harvesting: a reinforcement learning approach. IEEE Wireless Communications Letters 9(2):223–227
Zhou Y, Yang H, Hu Y, Kung S (2020) Cross-layer network lifetime maximization in underwater wireless sensor networks. IEEE Syst J 14(1):220–231
Xu J, Li K, Min G, Lin K, Qu W (2012) Energy-efficient tree-based multipath power control for underwater sensor networks. IEEE Transactions on Parallel and Distributed Systems 23(11):2107–2116
Jing L, He C, Huang J, Ding Z (2017) Energy management and power allocation for underwater acoustic sensor network. IEEE Sensors J 17(19):6451–6462
Zhang Y, Huang Y, Wan L, Zhou S, Shen X, Wang H (2016) Adaptive OFDMA with partial CSI for downlink underwater acoustic communications. Journal of Communications and Networks 18 (3):387–396
Song K, Ji B, Li C (2019) Resource allocation for relay-aided underwater acoustic sensor networks with energy harvesting. Physical Communications 33:241–248
Prasad G, Mishra D, Hossain A (2018) Joint optimal design for outage minimization in DF relay-assisted underwater acoustic networks. IEEE Commun Lett 22(8):1724–1727
Liu Z, Gao L, Liu Y, Guan X, Ma K, Wang Y (2020) Efficient QoS support for robust resource allocation in blockchain-based femtocell networks. In: IEEE transactions on industrial informatics, vol 16, pp 7070–7080
Stojanovic M, Preisig J (2009) Underwater acoustic communication channels: propagation models and statistical characterization. IEEE Commun Mag 47(1):84–89
Berkhovskikh L, Lysanov Y (1982) Fundamentals of ocean acoustics. New York, Springer
Coates R (1989) Underwater acoustic systems. Wiley, New York
Stojanovic M (2006) On the relationship between capacity and distance in an underwater acoustic communication channel. In: Proc. ACM int. workshop underwater netw. (WUWNet) , pp 41–47
Gong Z, Li C, Jiang F (2018) AUV-aided joint localization and time synchronization for underwater acoustic sensor networks. IEEE Signal Processing Letters 25(4):477–481
Kulkarni IS, Pompili D (2010) Task allocation for networked autonomous underwater vehicles in critical missions. IEEE Journal on Selected Areas in Communications 28(5):716–727
Liu Z, Xie Y, Yuan Y, Ma K, Chan KY, Guan X (2020) Robust power control for clustering-based vehicle-to-vehicle communication. IEEE Syst J 14(2):2557–2568
Xie Y, Liu Z, Chan KY, Guan X (2020) Energy-spectral efficiency optimization in vehicular communications: joint clustering and pricing-based robust power control approach. IEEE Trans Veh Technol 69(11):13673–13685
Acknowledgements
This work is partly supported by National Key R&D Program of China under grant 2018YFB1702100, National Natural Science Foundation of China under grant 61873223,61803328, and the Natural Science Foundation of Hebei Province under grant F2019203095.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
Proof of Theorem 1
We first assume that (x1, x2,...,xn) is the maximum of \(\sum \limits _{i=1}^{n}f_{i}(x_{i})\) while (19) is not satisfied, i.e. (29) holds.
When the constraint \(\sum\limits _{i=1}^{n}x_{i}=C\) is considered, \(x_{j}^{\prime }=x_{j}+\theta \) and \(x_{k}^{\prime }=x_{k}-\theta \) are assumed, where 𝜃 is a constant with tiny value and i≠j. We can obtain the following,
According to Eq. 30, it can be found that \(\ln (1+x_{j}^{\prime }/F_{j})+\ln (1+x_{k}^{\prime }/F_{k})\neq \ln (1+x_{j}/F_{j})+\ln (1+x_{k}/F_{k})\); hence the value of \(\sum\limits _{i=1}^{n}f_{i}(x_{i})\) can be changed by adding 𝜃 to xj. In other words, (x1, x2,⋯ ,xn) is not the optimum of \(\sum\limits _{i=1}^{n}f_{i}(x_{i})\) if Eq. 29 is true. Therefore, Theorem 1 is proved. □
Rights and permissions
About this article

Cite this article
Liu, Z., Meng, X., Yuan, Y. et al. Joint optimization for throughput maximization in underwater acoustic networks with energy harvesting. Peer-to-Peer Netw. Appl. 14, 2115–2126 (2021). https://doi.org/10.1007/s12083-021-01171-w
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12083-021-01171-w