
Abstract
Allee effects, or positive functional relationships between a population’s density (or size) and its per unit abundance growth rate, are now considered to be a widespread if not common influence on the growth of ecological populations. Here we analyze how stochasticity and Allee effects combine to impact population persistence. We compare the deterministic and stochastic properties of four models: a logistic model (without Allee effects), and three versions of the original model of Allee effects proposed by Vito Volterra representing a weak Allee effect, a strong Allee effect, and a strong Allee effect with immigration. We employ the diffusion process approach for modeling single-species populations, and we focus on the properties of stationary distributions and of the mean first passage times. We show that stochasticity amplifies the risks arising from Allee effects, mainly by prolonging the amount of time a population spends at low abundance levels. Even weak Allee effects become consequential when the ubiquitous stochastic forces affecting natural populations are accounted for in population models. Although current concepts of ecological resilience are bound up in the properties of deterministic basins of attraction, a complete understanding of alternative stable states in ecological systems must include stochasticity.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
In population ecology, an Allee effect was traditionally viewed as a positive functional relationship between a population’s density (or size) and its per unit abundance growth rate (Allee 1931, 1938; Odum and Allee 1954; Philip 1957; Dennis 1989). The concept of an Allee effect, also known as positive density dependence, inverse density dependence, under-crowding, or depensation, arose as a qualifier to the population regulation and density dependence (meaning negative density dependence) concepts that preoccupied ecology for many decades (Allee et al. 1949; Andrewartha and Birch 1954). A variety of possible biological mechanisms can cause Allee effects, among them increased mating encounters (as population abundance increases), increased reproduction due to physiological or social facilitation, decreased mortality due to group protection from predators, increased predation success in groups of cooperative predators, or resistance afforded by increased density to competition or invasion from other species (see recent reviews by Courchamp et al. 2008; Kramer et al. 2009).
In light of the different mechanisms, present-day investigators often define a “component Allee effect” as a positive relationship between any measurable component of individual fitness and population size or density (Stephens et al. 1999; Berec et al. 2007; Courchamp et al. 2008). These investigators rightly point out that a component Allee effect might be overshadowed by other density-dependent forces affecting net fitness. However, the term “demographic Allee effect” has been suggested to replace “Allee effect” for the characteristic positive density dependence in net fitness, but the term risks confusion with demographic variability, another potentially important force in small populations. Moreover, demographic stochastic variability in sex ratio can cause an Allee effect in mean reproduction (Engen et al. 2003). a phenomenon perhaps more deserving of the term demographic Allee effect. In what follows, we will simply retain the earlier usage of Allee effect as the overall term for net positive density dependence in the mean per unit abundance growth rate.
Allee effects are now considered to be a widespread if not common influence on the growth of ecological populations. Early on, Allee et al. (1949) and Andrewartha and Birch (1954) marshaled experimental and field studies that confirmed the presence of Allee effects among various species. In the three decades subsequent to the Allee et al. (1949) and Andrewartha and Birch (1954) volumes, the study of the effects of crowding and negative density dependence resumed center stage in population ecology, and research into effects of under-population languished (see Lidicker 2010). The dawn of conservation biology as a scientific discipline inspired renewed interest in Allee effects (Dennis 1989; Courchamp et al. 1999; Stephens and Sutherland 1999). and empirical and theoretical research in the topic has mushroomed. Recent reviews by Courchamp et al. (2008) and Kramer et al. (2009) assembled numerous examples of Allee effects in many plant, animal, and microbial species.
The first mathematical model of population growth with an Allee effect was actually contributed and analyzed by Volterra (1938), independent of, and uninformed by, Allee’s (1931, 1938) more qualitative work during those same years. Positive density dependence (specifically in the form of rare matings) evidently was another question posed to the great Italian mathematician by his biologist nephew D'Ancona, similar to the earlier questions that inspired Volterra’s better-known work on competition and predation (Kingsland 1985). Volterra’s model takes the per unit abundance growth rate to be a concave-down quadratic equation, one of the simplest expressions having an increasing portion for low population abundance and a decreasing portion for high abundance. Multiplying by abundance gives a cubic equation for the population growth rate, with a root at zero abundance and the potential for two positive roots representing a lower unstable equilibrium and an upper stable equilibrium. The cubic model of Allee effects has been rediscovered and republished various times.
Missing in the vast majority of theoretical as well as empirical studies of Allee effects is consideration of stochasticity. Early in the conservation biology literature, stochasticity (specifically, demographic stochasticity) was recognized as part of the “extinction vortex” of forces contributing to the extinction of rare populations (Gilpin and Soulé 1986), with Allee effects oddly omitted from the list of vortex forces. Lande (1988) and Dennis (1989) raised dire warnings that stochasticity as well as Allee effects should be considered for determining minimum viable population sizes for species conservation. However, since then, the burgeoning literature on modeling single-species Allee effects (reviewed by Boukal and Berec 2002; Courchamp et al. 2008) has primarily been in the deterministic tradition established in ecology by Volterra. The theoretical interest has often employed deterministic discrete time maps and centered on whether Allee effects stabilize or further destabilize the oscillations and chaos arising from overcompensation or multiple species interactions (e.g., Scheuring 1999; Fowler and Ruxton 2002; Zhou et al. 2005; Çelik and Duman 2009; Elaydi and Sacker 2009; Wang et al. 2013).
Scattered recent exceptions to the deterministic tradition feature stochasticity (e.g., Møller and Legendre 2001; Dennis 2002; Liebhold and Bascompte 2003; Engen et al. 2003; Bessa-Gomes et al. 2004; Drake 2004; Drake and Lodge 2006; Lee et al. 2011). Taylor and Hastings (2005) provide an excellent review of Allee effects in the context of biological invasions and discuss stochastic as well as deterministic models available at the time. In particular, Dennis (2002) studied the combination of Allee effects and stochasticity using diffusion processes for a single species, a type of general stochastic population model that accommodates both demographic and environmental stochastic fluctuations. He showed that if a deterministic model has a lower critical density, or an unstable equilibrium, the stochastic version would have an inflection point in the probability of attaining a lower abundance a before an upper abundance b (probability of quasi-extinction). The inflection point prediction, along with a statistical analysis method suggested by Dennis (2002) for detecting such inflection, was used in empirical studies of propagule pressure in establishment of biological invasives by Leung et al. (2004) and Brockerhoff et al. (2014). Because the inflection corresponds exactly to the underlying deterministic critical Allee point, Boukal and Berec (2002) suggested that stochasticity only “blurs” the step-like character of Allee effect extinction into a sigmoidal form. The question arises as to what if any emergent dynamic properties are produced by stochasticity in a population subjected to Allee effects.
Here we extend the analysis of how stochasticity and Allee effects combine to impact population persistence. We revisit Volterra’s (1938) original model, constructing a stochastic version in which the growth rate is perturbed by environmental noise. We employ the diffusion process approach for modeling single-species populations. To the probability of attaining a before b (as in Dennis 2002), we add consideration of the mean times to attain a or b as well as the existence and properties of stationary distributions of population abundance. We show that the resulting mean attainment times in the stochastic models provide an analogue to the attainment times (solution trajectories) in deterministic models. Stationary distributions of population abundance, when they exist (weak Allee effect or immigration), provide insights into the abundance levels at which a population is expected to persist. The stochastic versions of models with Allee effects collectively predict that even weak Allee effects can become consequential when the ubiquitous stochastic forces affecting natural populations are accounted for in population models. Although current concepts of ecological resilience are bound up in the properties of deterministic potential functions (Ludwig et al. 1997). a complete understanding of alternative stable states in ecological systems must include stochasticity.
Deterministic models
A general form for a deterministic model of singles-species population in continuous time is the following differential equation (DE):
Here N t is population abundance at time t, and m(N t ) is a function specifying the form of any density dependence. Four examples constitute the focus of this paper.
Model 1
The first model, the logistic model of Verhulst (1838), takes the function m(N t ) to be a quadratic concave-down function:
Here r and k are positive constants. The lower root of the quadratic function is zero (formally, an unstable equilibrium), and k is the positive upper root representing a stable equilibrium abundance (carrying capacity). The per unit abundance growth rate given by
is a linear function with negative slope and positive vertical axis intercept given by r (maximum per unit abundance growth rate, Fig. 1a) and as such is one of the simplest models of negative density dependence.

Solid curves depict per unit abundance growth rates (m(n)/n) for four deterministic population models: a logistic (\( m(n)=rn-\frac{r}{k}{n}^2 \), using r=.58, k = 100), b Volterra model with weak Allee effect (\( m(n)=sn\left(1-\frac{n}{k_2}\right)\left(\frac{n}{k_1}-1\right) \), with s =−.1, k 1 = − 10, k 2 = 80), c Volterra model with strong Allee effect (\( m(n)=sn\left(1-\frac{n}{k_2}\right)\left(\frac{n}{k_1}-1\right) \), with s=.8, k 1 = 20, k 2 = 80), and d Volterra model with strong Allee effect and immigration (\( m(n)=h+sn\left(1-\frac{n}{k_2}\right)\left(\frac{n}{k_1}-1\right) \), with s=.8, k 1 = 30, k 2 = 80, h = 3). Intersections with dashed lines represent equilibria. Here m(n) denotes the population growth rate at abundance n
Models 2 and 3 (below) are special cases of Volterra’s model of Allee effects. Volterra’s model takes the population growth rate m(N t ) to be a third-degree polynomial function of population abundance:
Here a and b are positive constants, and s in Volterra’s original formulation is positive as well. Volterra reasoned that the number of births in a population might be taken as proportional to N 2 t , or the number of meetings between the sexes envisioned as molecules colliding, but also that the proportionality constant itself is not constant but rather is a decreasing linear function of N t due to negative density dependence. Also, a simple linear death rate, sN t , is subtracted from the growth rate. In this fashion, Volterra obtains a cubic polynomial function with a negative coefficient for the cubic term and a root (and vertical axis intercept) of 0. The model can be built by formulating the per unit abundance growth rate (which Volterra called the “increase coefficient”) as a concave-down quadratic function:
Written in terms of two real-valued roots k 1 and k 2 (when they exist), the model becomes
Here k 2 = [b + (b 2 − 4as)1/2]/(2a), and k 1 = [b − (b 2 − 4as)1/2]/(2a). The constant k 2 is an upper stable equilibrium, and when k 1 is positive, it represents a lower unstable equilibrium, a critical abundance below which extinction is assured. The Volterra model is often cast in the form of Eq. 6 in its later appearances in the ecological literature, in order to emphasize the new unstable equilibrium and to retain a similarity in notation and form to the logistic model. It should be borne in mind that both k 1 and k 2 are functions of s and the other underlying demographic parameters. An increase in mortality, for instance, would not only increase k 1 but would also reduce k 2 as well. As one of the simplest models with an Allee effect combined with negative density dependence, the Volterra model can capture basic dynamical features (such as a lower unstable equilibrium and an upper stable equilibrium) present in other deterministic models, such as those of Philip (1957) and Dennis (1989) that incorporate mechanistic mating encounter functions.
Model 2 (weak Allee effect)
If s is allowed to be negative in Volterra’s quadratic per unit abundance rate (Eq. 5), then the root k 1 (Eq. 6) is negative. The number -s then represents a positive intercept for the per unit abundance rate (Fig. 1b). The rate starts positive and increases at first in a show of positive density dependence before turning and decreasing through zero in response to negative density dependence. The positive density dependence without a critical unstable equilibrium is the hallmark of the so-called “weak Allee effect” (Stephens et al. 1999; Courchamp et al. 2008). Population growth at low densities would be positive but slow in comparison to intermediate densities.
Model 3 (strong Allee effect)
Volterra’s model in its original formulation with s > 0 represents a strong Allee effect. When 0 < s < b 2/(4a), there are two positive real roots k 1 and k 2 to the per unit abundance growth rate (Eqs. 5 and 6), representing the traditional case of a lower unstable critical equilibrium and an upper stable equilibrium (Fig. 1c). However, when s > b 2/(4a), the roots vanish into the complex plane and the per unit abundance growth rate is everywhere negative. Population decline to extinction from all initial abundances would be the outcome. That the critical size k 1 increases and the stable size k 2 decreases when a death rate (i.e., s) increases or some other demographic parameter is degraded (Dennis 1989) is an underappreciated theoretical property of Allee effects. Harvesting, for instance, could make Allee effects much worse.
Model 4 (Allee effect with immigration)
The fourth model adds immigration to the Volterra model; it is in the form
Here h is a positive constant, representing a constant rate of immigration into the population from a source elsewhere. The growth rate m(N t ) is still a cubic polynomial, but zero and the values k 1 and k 2 from Eq. 6 are no longer roots. Instead, the growth rate m(N t ) has the positive value h when N t is zero, so that population increase occurs even from an initial abundance of zero. If h is being added to a growth rate with a strong Allee effect, the Allee critical equilibrium becomes smaller, and the upper stable equilibrium becomes larger, as h increases. As well, a third positive root appears, below the Allee critical equilibrium, representing a new locally stable equilibrium. The new stable equilibrium is very low, representing, for instance, an endemic abundance in an unfavorable area for net biological growth maintained by immigration from other regions.
The per unit abundance growth rate given by
has a pole at zero and three positive roots (the two stable equilibria separated by the unstable equilibrium, Fig. 1d), provided h is small. Large values of h would cause the two lower equilibria to merge and would result in positive growth for all low abundances and just one upper globally stable equilibrium.
Potential functions for deterministic systems
A potential function u(N t ) for the generic deterministic population model (Eq. 1) is defined by
In physics, u(N t ) can represent potential energy levels of some object at position N t , but ecologists’ use of the words “forces,” “potential,” “resistance,” and other physics-like terms to describe population growth tendencies (as in Chapman 1928) is mostly metaphorical. Instead, an intuitive ecological interpretation of a potential function involves the amount of time necessary for a population at some initial abundance to reach another abundance. Specifically, the waiting time t(n) needed to reach abundance n from initial abundance x is given by
provided the integrand is finite between x and n and the integral is positive. If an equilibrium \( \overline{n} \) exists between x and n, defined by \( m\left(\overline{n}\right) = {u}^{\prime}\left(\overline{n}\right) = 0 \), then n cannot be attained from x. If the integral is negative, n is “uphill” from x on the potential function and is unattainable.
The potential function u(n) is the bowl in the familiar “marble in a bowl” analogy (Case 2000), in which the bottom of the bowl represents equilibrium. The slope of the potential function at an abundance y gives the speed with which the abundance is passing through the value y. When the slope is steep, the amount of time being accumulated in the waiting time (Eq. 10) at that point is small. For a given dynamic model, the potential function is an antiderivative and hence is known only up to an arbitrary constant. The initial abundance x fixes the constant (the vertical location of the function), but the dynamic properties of the model (i.e., the hills and valleys of u(n)) depend functionally on n.
The logistic model (model 1) has the following potential function:
Note that peaks of m(n) correspond to inflection points of u(n), and zeros of m(n) correspond to peaks or valleys of u(n) (Fig. 2a, b). The logistic potential function has a local maximum at 0 (unstable equilibrium), a local minimum at k (stable equilibrium), and an inflection point at k/2 (maximum positive growth rate).

Population growth rate (a) and potential function (b) for the logistic model (r=.58, k = 100), and population growth rate (c) and potential function (d) for the Volterra model with weak Allee effect (s =−.58, k 1 = − 10, k 2 = 80). Here m(n) denotes the population growth rate, with functional forms given in Fig. 1a, b, and u(n) denotes the potential function defined by u' (n) = − m(n), at abundance n
The potential function for the Volterra model is given by
Under a weak Allee effect (model 2), the growth rate m(n) is positive everywhere below an upper stable equilibrium but is low for small abundances (Fig. 2c). The resulting potential function for model 2 resembles that of the logistic, except that it is much less steep for small population abundances (Fig. 2d). The growth rate m(n) under a strong Allee effect (model 3) has three equilibria (0, k 1, k 2; Fig. 3a). The resulting potential function under model 3 has local minima at 0 and k 2 (stable equilibria) and a local maximum at k 1 (Fig. 3b).

Population growth rate (a) and potential function (b) for the Volterra model with strong Allee effect (s=.8, k 1 = 30, k 2 = 80), and population growth rate (c) and potential function (d) for the Volterra model with strong Allee effect and immigration (s=.8, k 1 = 30, k 2 = 80, h = 3 where k 1 and k 2 represent equilibria under conditions of no immigration). Here m(n) denotes the population growth rate, with functional forms given in Fig. 1c, d, and u(n) denotes the potential function defined by u' (n) = m(n), at abundance n
The potential function for the Volterra model with immigration (model 4) is given by
With immigration added to the Volterra model (model 4), the growth rate m(n) has as many as three equilibria (k 0, k 1, k 2) and is positive at population abundances near zero, producing a stable equilibrium k 0 below a critical unstable equilibrium k 1 (Fig. 3c). The resulting potential function under model 4 shows a small shallow basin around the lower stable equilibrium and a deeper, wider basin around the upper stable equilibrium k 2 (Fig. 3d). The configuration represents a classic bistable system with two stable equilibria separated by an unstable equilibrium.
The deterministic waiting times arising from the potential functions Eq. 11 through Eq. 13 can be written in terms of equilibria, when they exist. The waiting time for model 1 becomes
while the Volterra models (models 2 and 3) produce
and model 4 yields
Calculating t(n) for a range of n values starting at an initial size x basically produces a solution trajectory for the corresponding differential equation model, provided the range of n values does not cross an equilibrium (Fig. 4). With the exception of the logistic waiting time (Eq. 14), the expressions cannot be algebraically inverted to give n as a function of t.

Deterministic waiting times (t(n)) as functions of population abundance n for four deterministic population growth models: a logistic model (r=.58, k = 100, x = 5, x = 120), b Volterra model with weak Allee effect (s =−.1, k 1 = − 10, k 2 = 80, x = 5, x = 100), c Volterra model with strong Allee effect (s=.3, k 1 = 20, k 2 = 80, x = 15, x = 25, x = 100), and d Volterra model with strong Allee effect and immigration (h = 2, s=.525, k 1 = 26.9, k 2 = 78.1, corresponding to model equilibria at 5, 20, and 80, with initial abundances x = 1, x = 15, x = 25, x = 99). The waiting times are solution trajectories of differential equation models of the form \( \frac{dn}{dt}=m(n) \), with population abundance n on the horizontal axis. Dashed lines represent deterministic equilibria. Functional forms of m(n) are as in Fig. 1a–d
Stochastic models
The potential functions (Eqs. 11, 12, and 13) and the waiting times (Eqs. 14, 15, and 16) provide underlying dynamic tendencies but by themselves fail to capture how density-dependent forces are manifested in ecological populations. Ecological populations are buffeted by stochastic forces (Dennis and Taper 1994). even in the laboratory (Costantino et al. 2005). Density dependence, whether negative or positive, exists as an underlying mean tendency that combines with random forces to yield fluctuating population abundances through time. As a result, concepts of ecological dynamics based on deterministic models such as stable and unstable equilibria, potential functions, and waiting times must take on new meanings for stochastic populations.
Diffusion processes as a class of stochastic processes offer a wide range of models for studying the interplay of stochastic and deterministic forces in population ecology. Diffusion processes spring naturally from continuous time models in the form of Eq. 1, but they also arise as probabilistic approximations to many discrete time models. Karlin and Taylor (1981) develop various examples in which time and state space in discrete time models are rescaled so as to yield workable diffusion process approximations. As well, Allen et al. (2005) show that diffusion processes can closely approximate Markov models with integer state spaces, such as the discrete birth–death processes frequently used for modeling rare species.
A diffusion process can be written in the form of a stochastic differential equation (SDE):
Here v(n) is nonnegative for n ≥ 0, and dB t (an increment of a Brownian motion process) has a normal distribution with mean 0 and variance dt, with dB s and dB t uncorrelated if s ≠ t. The SDE (Eq. 17) defines N t as a diffusion process, a continuous time stochastic process with the Markov property (Karlin and Taylor 1981). The SDE as written invites easy simulation of population trajectories, with each Euler increment m(N t )dt in population abundance perturbed by an independent, normally distributed random punch that has a mean of 0 and a variance of v(N t )dt. The function m(n) is the “infinitesimal mean” representing underlying deterministic forces. The function v(n) is the “infinitesimal variance” that scales the stochastic noise fluctuations. Different forms for v(n) arise from different types of stochastic mechanisms. The commonly used form given by
(with σ 2 > 0) is a general model of the effect of environmental fluctuations on population growth, while the form given by
(with ϕ > 0) is a general model of demographic fluctuations (Tier and Hanson 1981; Engen et al. 1998).
A stochastic logistic model with environmental noise (stochastic version of model 1) is defined by Eq. 2 in conjunction with Eq. 18. A stochastic Volterra model with environmental noise (stochastic version of models 2 and 3) is defined by Eq. 4 in conjunction with Eq. 18. A stochastic Volterra model with immigration and environmental noise (stochastic version of model 4) is defined by Eq. 7 in conjunction with Eq. 18. In each stochastic model, the stochastic and deterministic forces blend to produce emergent dynamic properties.
For diffusion processes with just one state variable, many formulas for stochastic properties have been derived (Goel and Richter-Dyn 1974; Karlin and Taylor 1981; Gardiner 1983). We find two properties in particular to be helpful for studying how Allee effects and stochastic forces combine: stationary distributions and mean attainment time.
Stationary distributions
If a stationary distribution for N t exists, it has probability density function (pdf) given by (Karlin and Taylor 1981):
Here C is a constant that renders the area under p(n) over the range of N t equal to 1 (frequently called a “normalization constant,” a term not meant to imply anything related to a normal distribution). The integral in the exponent is an antiderivative, and any constant of integration produced is absorbed into C. If p(n) does not have finite area, then a stationary distribution does not exist (Tanaka 1957). Typically, in population models when a stationary distribution does not exist, then the population goes extinct or goes infinite with probability 1, such as with some stochastic exponential growth models. If the stationary distribution exists, then the area under p(n) between a and b gives the long-run proportion of time that the process N t will spend in the interval (a, b). The stationary distribution is the “equilibrium” of stochastic population models (Dennis and Patil 1984; Dennis and Costantino 1988). In some models, p(n) will not exist as a stationary distribution but some truncated portion of it will represent a “quasistationary” distribution describing the behavior of the process for a long but transient period of time (for instance, fluctuating around a locally stable equilibrium before ultimately going extinct; see Allen 2010). The function p(n), even if it does not represent a stationary distribution, appears in formulas for other properties of diffusion processes.
The stationary distribution for the stochastic logistic model (model 1 with environmental noise) is given by
Here α = (2r/σ 2) − 1, and β = 2r/(kσ 2). The stationary distribution is a gamma distribution (Dennis and Patil 1984; Dennis and Costantino 1988), of which the chi-square distribution is a special case, and the stationary distribution exists provided α > 0 (or 2r > σ 2). The gamma stationary distribution when it exists is unimodal for low noise intensity (low σ 2; Fig. 5a, solid curve) and J-shaped for higher noise intensity (Fig. 5a, dashed curve). The gamma stationary distribution accurately described numerous laboratory population experiments with many hundreds of observations (Dennis and Costantino 1988). In the experiments, populations fluctuated over several orders of magnitude, leading to the conclusion that “carrying capacity” is a probability distribution, not a point.

Probability density functions for stationary distributions arising from various stochastic population models. a Gamma stationary distributions for the stochastic logistic model with environmental noise (r=.58, k = 100). Solid curve: low noise intensity (σ 2=.19333). Dashed curve: intermediate noise intensity (σ 2=.58). b Stationary distribution for the stochastic Volterra model with weak Allee effect and environmental noise (s =−.1, k 1 = − 10, k 2 = 80). Solid curve: low noise intensity (σ 2=.08). Dashed curve: intermediate noise intensity (σ 2=.18). c Stationary distribution for the stochastic Volterra model with strong Allee effect, immigration, and environmental noise (h = 10, s = 2, k 1 = 3.5425, k 2 = 56.458), under low noise intensity (σ 2 = 4). d Stationary distribution for the stochastic Volterra model with strong Allee effect, immigration, and environmental noise (h = 10, s = 2, k 1 = 3.5425, k 2 = 56.458), under high noise intensity (σ 2 = 5.76). The stationary densities are given by \( p(n) = \frac{C}{v(n)} exp\left[2{\displaystyle \int}\frac{m(n)}{v(n)}dn\right] \) where v(n) = σ 2 n 2 and functional forms of m(n) are as in Fig. 1a, b, d, d
The stationary distribution does not exist for the stochastic logistic model if the noise intensity is too high (2r ≤ σ 2). Under high noise intensity, as time gets large, the probability distribution for N t becomes concentrated within an arbitrarily small distance of 0. Although trajectories in these environmental noise models cannot mathematically attain 0, here under the high noise condition a population trajectory is ultimately doomed to linger forever within epsilon of 0, meaning extinction in practicality.
The function p(n) for the stochastic Volterra models (models 2 and 3 with environmental noise) is given by
Here θ = a/σ 2 = s/(k 1 k 2 σ 2), γ = 2b/σ 2 = 2s[(1/k 1) + (1/k 2)]/σ 2, and α = − (2s/σ 2) − 1. A stationary distribution exists for the weak Allee effect model (model 2 with environmental noise) provided α > 0 (or σ 2 < − 2s). The constant C has to be obtained with numerical integration. For low noise intensity (σ 2 < − s), the stationary distribution is unimodal (Fig. 5b, solid curve). Interestingly, for intermediate noise (− s < σ 2 < − 2s), the distribution has an upper mode (local maximum) and a lower antimode (local minimum; Fig. 5b, dashed curve). The higher noise intensity returns the population to low abundances where sluggish growth predominates, so that the population spends a large proportion of time at low abundances. The antimode is a stochastic version of a critical Allee point, and here it occurs even if the deterministic Allee effect is weak.
If the noise level is too high (σ 2 ≥ − 2s), the stationary distribution does not exist for model 2, because the expression p(n) is not integrable near 0 when α ≤ 0, which is implied by σ 2 ≥ − 2s. Eventual extinction is the result, similar to the high noise situation under the stochastic logistic model.
A stationary distribution does not exist at all for the strong Allee effect model (model 3). The condition α ≤ 0 is implied by s ≥ 0, and so p(n) is not integrable near 0. As a quasistationary distribution, p(n) has an upper mode (local maximum), a lower antimode (local minimum), and a pole at 0.
A stationary distribution exists for the stochastic version of the Volterra model with immigration (model 4 with environmental noise):
Here θ = a/σ 2, γ = 2b/σ 2, α = − (2s/σ 2) − 1, and ψ = 2h/σ 2. When α ≤ 0 (− 2s ≤ σ 2), the exponential term given by exp(−ψn − 1) defeats the reciprocal term n α − 1 near zero and thereby assures integrability of p(n) near zero. Long-term persistence of the population with an Allee effect, strong or weak, is rendered possible with immigration. For small noise intensity (small σ 2), the stationary distribution has two modes separated by an antimode (Figs. 5c, d). The lower mode when it exists can be small (Fig. 5c) or large (Fig. 5d) depending on parameter values. When the lower mode is large, the population will spend a large proportion of time at low abundance levels. Trajectories of the model would exhibit basin-hopping, alternately fluctuating around the upper equilibrium or lower equilibrium for varying times, with relatively rapid shifts between basins.
Mean first passage times
Let T denote the random amount of time necessary for the process N t to attain abundance level n, starting from abundance level x. There are actually two different random variables, say T 1 and T 2, corresponding respectively to x < n and n < x, that is, to the increasing or decreasing directions. The expected values of these random variables are the “mean first passage times” and are given by (Gardiner 1983)
One or both of these means might not exist (i.e., have infinite value). If a stationary distribution does not exist, then some values of n might never be attained. Lack of a stationary distribution typically results from some sort of absorbing boundary. For example, if abundance 0 acts like an absorbing value, a low population could go extinct before reaching a higher value n, that is, T 1 can take an infinite value with positive probability. In such a case, the function p(n) is not integrable near 0 and the numerator in the integrand expression in Eq. 24 will be infinite. In some models, as in some stochastic exponential growth models, ∞ can act as an absorbing boundary, in that the probability that the process exceeds any finite value approaches 1 as time becomes large. With an upper absorbing boundary, T 2 has positive probability of being infinite. The right tail of p(n) is then not integrable, and numerator in the integrand expression in Eq. 25 will be infinite. Evaluation of Eqs. 24 and 25 requires evaluating double integrals which seldom have closed forms and frequently are difficult to calculate numerically. However, the random variables T 1 and T 2 can be routinely simulated any number of times using simulations of diffusion process trajectories, and thus good approximations to their means τ 1(n) and τ 1(n) are easily obtained.
In the stochastic logistic model (model 1 with environmental noise), a stationary distribution does not exist when σ 2 ≥ 2r, that is, when the noise level drowns out, so to speak, the deterministic signal. In the stochastic logistic example with σ 2 ≥ 2r, as well as in the stochastic weak Allee effect model with σ 2 ≥ − 2s and the stochastic strong Allee effect model with any positive value of σ 2, the boundary at 0 has properties similar to an absorbing boundary, even though the value 0 cannot actually be attained by the process. The time-dependent probability distribution for N t piles up within an arbitrarily small distance from 0: the probability that 0 < N t < ϵ approaches 1 as time becomes large. Near or at an absorbing boundary, probability “leaks” from the rest of the range of the process. Thus, in the case of the stochastic logistic with large noise, as well as in the above indicated cases of the stochastic Volterra models, τ 2(n) (Eq. 25) exists, while τ 1(n) (Eq. 24) does not exist.
If a stationary distribution exists, the process N t is ergodic: Any value of n in the interior of the range of N t will eventually be attained in finite time from any interior value x. The mean first passage times (Eqs. 24 and 25) can be rewritten as
Here P(n) is the cumulative distribution function (cdf) for the stationary distribution (i.e., p (n) = P'(n)):
The expression in the integrand of Eq. 27 given by [1 − P(n)]/p(n) is known in the statistics literature as Mills’ ratio (the reciprocal of the hazard rate function) for the distribution with pdf p(n).
Two mean first passage times for the stochastic logistic model (model 1) are illustrated (solid curves, Fig. 6a). One is in the increasing direction (Eq. 26) commencing at initial size x = 5, and it passes through the deterministic equilibrium at k = 100. The other, in the decreasing direction (Eq. 27) and commencing at initial size x = 120, also passes through the deterministic equilibrium. Inflection points in each mean first passage time occur near the deterministic equilibrium. Deterministic waiting times from Fig. 4a are superimposed for comparison (dashed curves, Fig. 6a). The deterministic waiting times do not cross the equilibrium but rather approach it asymptotically.

Solid curves: mean time τ(n) to attain population abundance n, starting from an initial abundance x, calculated or simulated for various models. a Stochastic logistic model with environmental noise (r=.58, k = 100, σ 2=.19333), with x = 5 and x = 120. b Stochastic Volterra model with weak Allee effect and environmental noise (s =−.1, k 1 = − 10, k 2 = 80, σ 2=.08), with x = 5. c Stochastic Volterra model with strong Allee effect and environmental noise (s=.3, k 1 = 20, k 2 = 80, σ 2=.08), with x = 100. d Stochastic Volterra model with strong Allee effect, immigration, and environmental noise (h = 2, s=.525, k 1 = 26.9, k 2 = 78.1, σ 2=.08), with x = 1. Dashed curves are corresponding deterministic waiting times t(n) from Fig. 4. Here \( \tau (n)=2{\displaystyle \underset{x}{\overset{n}{\int }}}\frac{{\displaystyle {\int}_0^y}p(z)dz}{v(n)p(y)} dy \) if x < n, or \( \tau (n)=2{\displaystyle \underset{n}{\overset{x}{\int }}}\frac{{\displaystyle {\int}_y^{\infty }}p(z)dz}{v(y)p(y)} dy \) if x > n, where \( p(n) = \frac{C}{v(n)} exp\left[2{\displaystyle \int}\frac{m(n)}{v(n)}dn\right] \), v(n) = σ 2 n 2, and functional forms of m(n) are as in Fig. 1a, b, c, d
The sluggishness of growth at low abundances under a weak Allee effect (model 2) with environmental noise is reflected in the mean first passage times (solid curves, Fig. 6b). The mean first passage time from initial size x = 5 rises steeply at first, indicating that such a population would experience a prolonged slow start at establishment or recovery. We reemphasize that when abundance lingers at low levels, the population is exposed to additional forces not included in the model that magnify extinction risks, such as demographic stochasticity. The mean first passage times in Fig. 6b along with those in Fig. 6c, d were simulated, as the double integrals in Eqs. 26 and 27 for these models are numerically troublesome.
Under a strong Allee effect (model 3) with environmental noise, the mean time to reach any higher population abundance n (Eq. 26) is infinite, due to the mathematical possibility of extinction from any abundance without first attaining n. Only the mean first passage time to a lower abundance (Eq. 27) exists (solid curve, Fig. 6c). For a population at or above recovery levels (i.e., near k 2), the mean waiting time to attain abundance n increases rapidly as n decreases toward the unstable threshold k 2. Near k 2, however, the mean first passage time inflects, and attaining even lower abundance levels requires hardly any extra time.
Chances of a recovery are better under a strong Allee effect with immigration (model 4) and environmental noise. The mean first passage time to a higher abundance (Eq. 26) is finite (Fig. 6d). For a small population below the Allee threshold k 1, recovery is a steep uphill battle. The sluggishness of recovery even with immigration is consistent with the common experience of conservation agencies that successful species translocation or recovery often requires repeated propagule additions. Once the Allee threshold is passed, however, the mean first passage time increases only slowly, inflecting somewhere near the upper stable equilibrium and indicating rapid recovery or establishment. However, stochastic return to the abundance levels near the lower stable equilibrium is always a possibility. In fact, under a high noise level such as that corresponding to the stationary distribution in Fig. 5d, basin-hopping between low and high abundances would be frequent (Fig. 7). The population depicted in Fig. 7 would spend a lot of time rare, in spite of substantial replenishment.

Trajectory of the stochastic Volterra model with strong Allee effect, immigration, and environmental noise (h = 2, s=.525, k 1 = 26.9, k 2 = 78.1, σ 2=.18), with initial population abundance of 1, corresponding to the stationary distribution in Fig. 5d. Model is in the form \( d{N}_t = m\left({N}_t\right)dt + \sqrt{v\left({N}_t\right)}d{B}_t \), where N t is population abundance at time t, \( m(n)=h+sn\left(1-\frac{n}{k_2}\right)\left(\frac{n}{k_1}-1\right) \), v(n) = σ 2 n 2, and dB t (an increment of a Brownian motion process) has a normal distribution with mean 0 and variance dt, with dB s and dB t uncorrelated if s ≠ t
Discussion
While ecologists widely acknowledge that stochastic forces are ubiquitous in ecological systems, the deterministic ecological modeling tradition obscures emergent dynamic behavior caused by stochasticity. Environmental stochasticity has effects similar to harvesting (Dennis and Patil 1984; Dennis 1989) and can produce dynamics that are not present in the deterministic versions of models (Horsthemke and Lefever 1984; Dennis et al. 2003). In virtually all stochastic population models containing population regulation at high abundances, the population trajectories will eventually flirt with or even attain 0. Population extinction is always a lurking possibility.
Commencing with Holling (1973), ecologists have drawn a distinction between stability and resilience in ecological systems (Gunderson 2000). Ecological stability has been seen as the tendency of a system to return to a stable attractor after a perturbation (Holling 1973; May 1973). Normally, the stable attractor of interest is a point equilibrium, although other attractors (such as cycles, loops, chaos) have a demonstrable presence in some systems (Dennis et al. 2001). May (1973) popularized “local stability analysis” in ecological modeling, in which the signs, magnitudes, and natures of eigenvalues of a linearized model reveal the system dynamics near a point equilibrium. In particular, the principal eigenvalue was identified as quantifying the return time of the system to the equilibrium after a perturbation. The “community matrix” of species interactions (coefficients of the species abundances in the linearized models) became a cornerstone of ecological theory in the 1970s and 1980s (Case 2000). The advent of longer time series of abundances in ecological communities allowed the estimation of community matrices and various stability measures using stochastic versions of the species interaction models (Ives et al. 2003).
Ecological resilience, by contrast, usually refers to a system’s resistance to being perturbed into a basin of attraction belonging to an alternative stable state. The presumed requisite to the concept of resilience is the presence of one or more alternative stable states (Holling 1973; Ludwig et al. 1997; Gunderson 2000). Associated with each locally stable equilibrium would be a basin of attraction, or a set of initial system states from which the system trajectories would be drawn to the attractor.
We have seen here that in a system with one state variable, the basin landscape is conveniently captured by the deterministic potential function. The width of a basin has been commonly offered as a measure of resilience (Holling 1973; Ludwig et al. 1997; Gunderson 2000), in that it defines the magnitude of disturbance that would be required to knock the system out of the basin and into a neighboring state. Although potential functions as such do not generally exist for models with multiple state variables, basins of attraction certainly exist and some kind of measurement of their breadths could likely be devised.
The definition of resilience as the width of a basin of attraction, however, is incomplete. Stochastic forces are present in ecological systems (e.g., Sibly et al. 2005; Brook and Bradshaw 2006). Stochastic forces provide a means, absent human intervention, whereby a multistable system could jump basins. The persistence of a system within any given basin is diminished if the intensity of stochasticity is increased. In systems with multiple stable attractors, one finds that the persistence times can vary dramatically within a given basin as well as between the different basins (Henson et al. 1999, 2002). Persistence time in a basin is a random variable, with a probability distribution that depends on both the deterministic and the stochastic forces. Mathematically, the deterministic portion of a model represents the resistance of the fluctuating quantity to stochastic forces. For a given level of stochasticity, a deeper but narrower deterministic basin might produce greater persistence times on average than a wide shallow basin. Thus, incorporation of stochasticity is needed to complete the concept of ecological resilience.
Resilience depends not only on the presence and intensity of stochasticity but also on the type of stochasticity as well. Different types of stochastic forces act in different, density-dependent ways (Tier and Hanson 1981). Demographic stochasticity as commonly formulated (Engen et al. 1998; Engen and Sæther 1998) predicts near-determinism at large population sizes (Desharnais et al. 2006). By contrast, environmental stochasticity as commonly formulated (Engen et al. 1998; Engen and Sæther 1998) predicts substantial stochastic fluctuations at all population sizes (Dennis and Costantino 1988). Other types of stochasticity are possible. Examples are (a) demographically stochastic survival (like a binomial distribution) with a survival rate dependent on density (Dennis et al. 2001), and (b) rare but catastrophic environmental shocks (Lande 1993). The point is, the risk of stochastic exit from a basin of attraction depends on the type(s) of stochasticity prevailing during a population’s sojourn in the basin.
A mean attainment time function (Eqs. 24 or 25) combines deterministic tendencies and stochastic forces together into an overall measure of ecological resilience. The width, depth, and steepness of the deterministic basin along with the type and intensity of stochasticity all influence how long a system will persist in a particular basin, and such influences are quantified in a mean attainment time function. The mean attainment time function changes when its components change and can be used to study losses or gains in resilience in response to environmental change or management intervention.
We have shown here that a population experiencing Allee effects can be expected to have long run problems with persistence. Stochastic perturbations will eventually push the population to low levels. If the Allee effect is weak, the net population growth rate at low levels is positive but sluggish, creating increased risk of stochastic absorption at zero. The stochasticity can magnify the weak Allee effect into appearing for all practical purposes as if there is a lower unstable equilibrium, in the form of an antimode in the stationary distribution. If the Allee effect is strong, the net population growth rate at low population levels is negative and the population must win an unlikely favorable lottery of positive stochastic shocks in order to recover before sliding down into extinction. The addition of immigration to a population with a strong Allee effect can prevent extinction under ordinary environmental noise, but the underlying Allee effect can cause the population to fluctuate and linger at very low abundance levels.
Populations experiencing Allee effects would require additional ameliorating circumstances to persist. Persistence near an upper stable equilibrium can be prolonged by greater depth and/or greater width of the deterministic basin as well as lowered intensity of stochastic forces. For instance, strong negative density dependence and/or predominantly demographic stochasticity would make the deterministic forces of return to the upper equilibrium more influential and hence would increase resilience.
As well, even a small amount of immigration will enhance long-run persistence. A small amount of immigration added to a model with a strong Allee effect produces a lower positive stable equilibrium. A rare population could persist at the low point until favorable stochastic fluctuations allow it to escape to the basin of attraction to the upper stable equilibrium. The persistence, however, is precarious, in that the average time necessary to escape the lower basin can be large. The situation would describe an invading, reintroduced, or translocated population in the early stages of colonization, where continued propagule pressure is commonly required for the population to become established (Williamson 1996; Shigesada and Kawasaki 1997; Deredec and Courchamp 2007).
With a small amount of immigration under the strong Allee effect model analyzed here, the mean attainment time from the endemic level to the basin of attraction to the upper stable equilibrium can be large. The stationary probability distribution puts some of the probability in the basin of attraction to the upper stable equilibrium, and some in the lower basin, with the magnitudes depending on parameter values. The population will therefore persist at or near one of the stable equilibria for long time intervals, punctuated by occasional sojourns to the other basin. Extinction is averted by the propagule pressure contributed by immigration.
Concluding remarks
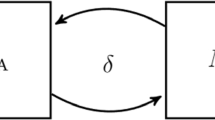
The existence of Allee effects poses an immediate quandary about the resilience of ecological populations. How do populations persist in a stochastic world? We conclude that populations with strong Allee effects could persist long-term if receiving migrants from a source population that (1) was near an upper stable equilibrium itself and (2) was large enough to nearly negate demographic stochasticity. We conjecture that a network (metapopulation) of strong Allee populations might persist, long-term if not indefinitely, by trading occasional migrants. We note that establishing or recovering a population by colonization or translocation is often a tenuous process at first, requiring continuous replenishment of colonists for the population to become successful. And, we assert that practical questions of ecological resilience cannot be adequately addressed with only deterministic tools. The marble can and will hop out of the ecological bowl.
References
Allee WC (1931) Animal aggregations. University of Chicago Press, Chicago
Allee WC (1938) The social life of animals. Norton, New York
Allee WC, Emerson AE, Park O, Park T, Schmidt KP (1949) Principles of animal ecology. Saunders, Philadelphia
Allen LJS (2010) An introduction to stochastic processes with applications to biology, 2nd edn. CRC Press, Boca Raton
Allen EJ, Allen LJS, Schurz H (2005) A comparison of persistence-time estimation for discrete and continuous stochastic population models that include demographic and environmental variability. Math Biosci 196:14–38
Andrewartha HG, Birch LC (1954) The distribution and abundance of animals. University of Chicago Press, Chicago
Berec L, Angulo E, Courchamp F (2007) Multiple Allee effects and population management. Trends Ecol Evol 22:185–191
Bessa-Gomes C, Legendre S, Clobert J (2004) Allee effects, mating systems and the extinction risk of populations with two sexes. Ecol Lett 7:802–812
Boukal DS, Berec L (2002) Single-species models of the Allee effect: extinction boundaries, sex ratios and mating encounters. J Theor Biol 218:375–394
Brockerhoff EG, Kimberley M, Liebhold AM, Haack RA, Cavey JF (2014) Predicting how altering propagule pressure changes establishment rates of biological invaders across species pools. Ecology 95:594–601
Brook BW, Bradshaw CJA (2006) Strength of evidence for density dependence in abundance time series of 1198 species. Ecology 87:1445–1451
Case TJ (2000) An illustrated guide to theoretical ecology. Oxford University Press, Oxford
Çelik C, Duman O (2009) Allee effect in a discrete-time predator–prey system. Chaos, Solitons Fractals 40:1956–1962
Chapman RN (1928) The quantitative analysis of environmental factors. Ecology 9:111–122
Costantino RF, Desharnais RA, Cushing JM, Dennis B, Henson SM, King AA (2005) Nonlinear stochastic population dynamics: the flour beetle Tribolium as an effective tool of discovery. Adv Ecol Res 37:101–141
Courchamp F, Clutton-Brock T, Grenfell B (1999) Inverse density dependence and the Allee Effect. Trends Ecol Evol 14:405–410
Courchamp F, Berec L, Gascoigne J (2008) Allee effects in ecology and conservation. Oxford University Press, Oxford
Dennis B (1989) Allee effects: population growth, critical density, and the chance of extinction. Nat Resour Model 3:481–538
Dennis B (2002) Allee effects in stochastic populations. Oikos 96:389–401
Dennis B, Costantino RF (1988) Analysis of steady state populations with the gamma abundance model: application to Tribolium. Ecology 69:1200–1213
Dennis B, Patil GP (1984) The gamma distribution and weighted multimodal gamma distributions as models of population abundance. Math Biosci 68:187–212
Dennis B, Taper ML (1994) Density dependence in time series observations of natural populations: estimation and testing. Ecol Monogr 64:205–224
Dennis B, Desharnais RA, Cushing JM, Henson SH, Costantino RF (2001) Estimating chaos and complex dynamics in an insect population. Ecol Monogr 71:277–303
Dennis B, Desharnais RA, Cushing JM, Henson SM, Costantino RF (2003) Can noise induce chaos? Oikos 102:329–339
Deredec A, Courchamp F (2007) Importance of the Allee effect for reintroductions. Ecoscience 14:440–451
Desharnais RA, Costantino RF, Cushing JM, Hensen SM, Dennis B, King AA (2006) Experimental support of the scaling rule for demographic stochasticity. Ecol Lett 9:537–547
Drake JM (2004) Allee effects and the risk of biological invasion. Risk Anal 24:795–802
Drake JM, Lodge DM (2006) Allee effects, propagule pressure and the probability of establishment: risk analysis for biological invasions. Biol Invasions 8:365–375
Elaydi SN, Sacker RJ (2009) Population models with Allee effect: a new model. J Biol Dyn 4:397–408
Engen S, Sæther B-E (1998) Stochastic population models: some concepts, definitions and results. Oikos 83:345–352
Engen S, Bakke Ø, Islam A (1998) Demographic and environmental stochasticity—concepts and definitions. Biometrics 54:39–45
Engen S, Lande R, Sæther B-E (2003) Demographic stochasticity and Allee effects in populations with two sexes. Ecology 84:2378–2386
Fowler MS, Ruxton GD (2002) Population dynamic consequences of Allee effects. J Theor Biol 215:39–46
Gardiner CW (1983) Handbook of stochastic methods for physics, chemistry, and the natural sciences. Springer-Verlag, Berlin
Gilpin ME, Soulé ME (1986) Minimum viable populations: processes of extinction. In: Soulé ME (ed) Conservation biology: the science of scarcity and diversity. Sinauer, Sunderland, pp 19–34
Goel NS, Richter-Dyn N (1974) Stochastic models in biology. Academic Press, New York
Gunderson LH (2000) Ecological resilience—in theory and application. Annu Rev Ecol Syst 31:425–439
Henson SM, Costantino RF, Cushing JM, Dennis B, Desharnais RA (1999) Multiple attractors, saddles, and population dynamics in periodic habitats. Bull Math Biol 61:1121–1149
Henson SM, Costantino RF, Desharnais RA, Cushing JM, Dennis B (2002) Basins of attraction: population dynamics with two stable 4-cycles. Oikos 98:17–24
Holling CS (1973) Resilience and stability of ecological systems. Annu Rev Ecol Syst 4:1–23
Horsthemke W, Lefever R (1984) Noise-induced transitions: theory and applications in physics, chemistry, and biology. Springer-Verlag, Berlin
Ives AR, Dennis B, Cottingham KL, Carpenter SR (2003) Estimating community stability and ecological interactions from time-series data. Ecol Monogr 73:301–330
Karlin S, Taylor HM (1981) A second course in stochastic processes. Academic Press, New York
Kingsland S (1985) Modeling nature: episodes in the theory of population ecology. University of Chicago Press, Chicago
Kramer AM, Dennis B, Liebhold AM, Drake JM (2009) The evidence for Allee effects. Popul Ecol 51:341–354
Lande R (1988) Genetics and demography in biological conservation. Science 241:1455–1460
Lande R (1993) Risks of population extinction from demographic and environmental stochasticity and random catastrophes. Am Nat 142:911–927
Lee AM, Sæther B-E, Engen S (2011) Demographic stochasticity, Allee effects, and extinction: the influence of mating system and sex ratio. Am Nat 177:301–313
Leung B, Drake JM, Lodge DM (2004) Predicting invasions: propagule pressure and the gravity of Allee effects. Ecology 85:1651–1660
Lidicker WZ Jr (2010) The Allee effect: its history and future importance. Open Ecol J 3:71–82
Liebhold A, Bascompte J (2003) The Allee effect, stochastic dynamics and the eradication of alien species. Ecol Lett 6:133–140
Ludwig D, Walker B, Holling CS (1997) Sustainability, stability, and resilience. Conserv Ecol 1:7
May RM (1973) Stability and complexity of model ecosystems. Princeton University Press, Princeton
Møller AP, Legendre S (2001) Allee effect, sexual selection and demographic stochasticity. Oikos 92:27–34
Odum HT, Allee WC (1954) A note on the stable point of populations showing both intraspecific cooperation and disoperation. Ecology 35:95–97
Philip JR (1957) Sociality and sparse populations. Ecology 38:107–111
Scheuring I (1999) Allee effect increases the dynamical stability of populations. J Theor Biol 199:407–414
Shigesada N, Kawasaki K (1997) Biological invasions: theory and practice. Oxford University Press, Oxford
Sibly RM, Barker D, Denham MC, Hone J, Pagel M (2005) On the regulation of populations of mammals, birds, fish, and insects. Science 309:607–610
Stephens PA, Sutherland WJ (1999) Consequences of the Allee effect for behaviour, ecology and conservation. Trends Ecol Evol 14:401–405
Stephens PA, Sutherland WJ, Freckleton RP (1999) What is the Allee effect? Oikos 87:185–190
Tanaka H (1957) On limiting distributions for one dimensional diffusion processes. Bull Math Statist 7:84–91
Taylor CM, Hastings A (2005) Allee effects in biological invasions. Ecol Lett 8:895–908
Tier C, Hanson FB (1981) Persistence of density dependent stochastic populations. Math Biosci 53:89–117
Verhulst P-F (1838) Notice sur la loi que la population suit dans son accroissement. Correspondance mathématique et physique 10:113–121
Volterra V (1938) Population growth, equilibria, and extinction under specified breeding conditions: a development and extension of the theory of the logistic curve. Hum Biol 10:1–11
Wang W, Jiao Y, Chen X (2013) Asymmetrical impact of Allee effect on a discrete-time predator–prey system. J Appl Math. Article ID 973805
Williamson M (1996) Biological invasions. Chapman and Hall, London
Zhou SR, Liu YF, Wang G (2005) The stability of predator–prey systems subject to the Allee effects. Theor Popul Biol 67:23–31
Acknowledgments
This work was supported by a grant from King Abdul Aziz University, Saudi Arabia.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Dennis, B., Assas, L., Elaydi, S. et al. Allee effects and resilience in stochastic populations. Theor Ecol 9, 323–335 (2016). https://doi.org/10.1007/s12080-015-0288-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12080-015-0288-2