
Abstract
The stability conditions for an isolated specialist predator-prey community are fairly well understood. The spatial coupling of several such systems through dispersal of individuals can generate new dynamic behavior that is not yet completely understood. Many factors are known to be stabilizing or neutral, e.g., random dispersal or time delays, while others may induce instabilities in some cases but not others, e.g., density-dependent movement. We study the combination of two stabilizing mechanisms in a two-patch Rosenzweig-MacArthur model with a novel density-dependent movement term. Specifically, we assume that prey move between patches according to their perceived predation risk, and we include travel time between patches as a time delay. We show that the combination of mechanisms may be destabilizing even though each mechanism by itself is stabilizing. Our results show that a detailed knowledge of mechanisms and their temporal scales is necessary to correctly predict the stability of a metacommunity.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
The movement of individuals and the constraints imposed to movement over natural landscapes are key features of community dynamics that affect persistence and resilience of populations, species coexistence, and ecosystem function (Nathan and Giuggioli 2013). Ecological implications of movement can be predicted from simplistic assumptions of passive and instantaneous movement between locations. However, more complex patterns of movement associated with species traits (life history, behavior) and/or with environmental heterogeneity can have major ecological consequences. Most importantly, this interplay between species traits and the environment is greatly impacted by the management of exploited ecosystems. While simulation studies have incorporated complex behaviors (McCauley et al. 1993) and movement patterns in complex landscapes (Cuddington and Yodzis 2002; Ruokolainen et al. 2011), there is still an important gap between general ecological theory of spatial dynamics and our understanding of complex mechanisms and patterns of movement in natural landscapes. Here, we study the interaction between the time of movement across landscapes and behavioral drivers of movement to avoid predators. We integrate these features of landscapes and traits into a simple discrete-habitat model that extends current ecological theory. In particular, we study the stability of predator-prey dynamics in terms of the timescales of movement controlled by both behavior (predator avoidance) and life history (dispersal and migration) in relation to movement time across landscapes.
Trophic interactions between predators and their prey constitute a model system for the study of dynamical stability. Rosenzweig and MacArthur (1963) showed how such a simple ecological community can switch from stable equilibrium to stable limit cycles in response to increased carrying capacity of the prey (i.e., the paradox of enrichment). This simple model has generated a large body of literature on the role of individual movement as a stabilizing mechanism in simple two-patch systems, as well as spatially explicit models (Briggs and Hoopes 2004; Cantrell and Cosner 1996; Hauzy et al. 2010; Jansen 2001; Ramanantoanina et al. 2011). The most general analyses of such models result from the assumption of random and instantaneous movement of individuals between homogeneous locations. Many studies have been able to relax this assumption and include more complex behavioral mechanisms of movement and habitat heterogeneity such as taxis (Sapoukhina et al. 2003; Chakraborty et al. 2007), density-dependent movement (Abrams and Ruokolainen 2011), and travel time (Klepac et al. 2007). Mostly, these mechanisms have been studied separately or in simulation studies with specific parameter values. An integration into a general ecological theory is still missing.
Natural landscapes can be described as a matrix of various habitat types, each with its own impact on individuals (Goodwin and Fahrig 2002). In its simplest form, landscapes are represented as two or more suitable patches, where a population can establish, and surrounded by a landscape matrix, only allowing for movement between suitable habitats. This complex structure can be simplified by only considering the time of travel between suitable habitats instead of assuming instantaneous transfer of individuals (Klepac et al. 2007). However, when movement is associated with life-history traits such as dispersal of larvae or propagules, movement is assumed to be short compared to individual life span, which limits its study to arbitrarily low values. Alternatively, when movement is triggered by mechanisms operating over a much shorter timescale such as behavior, movement time can be scaled to that of behavioral responses. For example, the role of predator avoidance resulting in a non-consumptive response of prey to predator density can be formulated as density-dependent movement and has been well studied using models and experiments (Abdllaoui et al. 2007; Mchich et al. 2005; Mchich et al. 2007). It has been generalized to behavioral response of prey to total expected fitness and to evolutionary dynamics of the traits mediating the response (Abrams 2007). This behavioral response to predator density means that movement changes much faster than the expected life span of individuals and can thus interact with travel time between habitats. Here, we study community persistence and stability in response to the interaction between non-consumptive prey response to predators and travel time of prey between two discrete habitats. We more specifically present and analyze a two-patch extension of the Rosenzweig-MacArthur predator-prey model with a travel time (time delay) in both density-dependent and density-independent movements of the prey. We derive the timescales of density-independent and density-dependent movements relative to travel time that predict both stabilizing and destabilizing effects of movement on the spatially structured community.
In the following section, we present the details of our model and show that as long as movement is instantaneous, the inclusion of predator-dependent dispersal does not alter the stability of the coexistence steady state. When movement is not instantaneous, then an unstable coexistence equilibrium can be stabilized by density-independent dispersal (“Density-independent dispersal (α=0)” section). In addition, stable coexistence can be destabilized by predator-induced dispersal (“Predator-dependent dispersal (α>0)” section). Throughout the manuscript, we will use the terms “coexistence (steady) state” and “coexistence equilibrium” interchangeably. When coexistence occurs in the form of a stable limit cycle, we will explicitly say so.
The model
A minimal model that allows us to study how predator-dependent dispersal and travel time delay interact to affect the stability of a multi-patch predator-prey system tracks the density of prey (H i ) and predator (P i ) on two patches (i=1,2) through time, t. On each patch, we assume the Rosenzweig-MacArthur dynamics: the prey grows logistically in the absence of the predator and is consumed by the predator according to a type II functional response; the predator decays exponentially in the absence of prey. In the absence of predators, prey move randomly between the two patches with exponentially distributed waiting time. When predators are present, prey also leave a patch according to their perceived predation risk, which is proportional to the per capita of prey predation rate in the functional response. In particular, the perceived predation risk increases with the number of predators and decreases with the number of prey. Previous work had considered movement rates dependent on predator density only (e.g., Abdllaoui et al. (2007)) or on fitness (Abrams 2007). The total rate of movement between the two patches is a linear interpolation between random movement and predation avoidance. The time (η) that it takes an individual to travel from one patch to the other enters the equations in the form of a delay. For simplicity, we assume that the two patches are identical and that the predator does not move between patches. We write our model as
where D>0 is the movement rate and 0≤α≤1 denotes the contribution of predator-induced dispersal to the total dispersal rate. The prey growth rate and carrying capacity are r and K. Parameter a is the maximum ingestion rate, b is the half-saturation constant, and c is the inverse of the yield. The predator death rate is denoted by m, and ρ is a scaling factor proportional to c. We have several characteristic times in our model, but we focus on a few only. The inverse of the ingestion rate is the mean time between subsequent meals for the predator, which reflects the time between subsequent successful captures. We call 1/a the mean time to capture. The characteristic time of dispersal consists of the mean residence time on a patch, 1/D, and the (fixed) travel time between patches, η. All parameters in our model are summarized in Table 1.
We reduce the number of parameters by passing to non-dimensional quantities \(H_{i}=b h_{i}, P_{i}=\frac {br}{ac}p_{i}, t=\frac {1}{a}s, \eta =\frac {1}{a}\tau , k=\frac {K}{b}, \gamma =\frac {\rho r}{ac}, d=\frac {D}{a}, \epsilon =\frac {r}{a}, \mu =\frac {m}{a}\). The resulting dimensionless system of equations is as follows.
In the absence of dispersal, the model consists of two independent copies of the Rosenzweig-MacArthur system in the following form:
This well-known system has up to three steady states: the trivial state (0,0), the predator-extinction state (k,0), and the coexistence state (h ∗,p ∗), where \(h^{*}=\frac {\mu }{1-\mu }\) and \(p^{*}=(1-\frac {h^{*}}{k})(1+h^{*})\), provided that 0<h ∗<k. The predator-extinction state is stable precisely when h ∗>k. When (k−1)/2<h ∗<k, the coexistence equilibrium is globally stable, but when 0<h ∗<(k−1)/2, the coexistence state is unstable and a unique globally stable limit cycle exists (see, e.g., Kot (2001)).
The three equilibria from the single-patch model translate into three corresponding equilibria the two-patch model since the assumption of equal patches gives a symmetric system. These are (0,0,0,0),(k,0,k,0), and (h ∗,p ∗,h ∗,p ∗), respectively. In addition, since predators do not move between patches, there can be two boundary equilibria \((\bar {h}, 0, h^{*},\bar {p})\) and \((h^{*}, \bar {p}, \bar {h}, 0)\) for some positive numbers \(\bar h, \bar p\). We focus the analysis on the stability of the symmetric positive coexistence equilibrium (h ∗,p ∗,h ∗,p ∗).
When movement between patches is instantaneous, i.e., τ=0, our model is a special case of the model in Hauzy et al. (2010). Those authors showed that then the coexistence equilibrium (h ∗,p ∗,h ∗,p ∗) of Eq. 2.2 is stable if and only if the coexistence equilibrium (h ∗,p ∗) of Eq. 2.3 is stable. For the convenience of the reader, we give the proof of this fact in Appendix A. In other words, if dispersal between patches is instantaneous, then predation-induced prey movement does not affect the stability of the coexistence steady state. From now on, we study the case when dispersal is not instantaneous.
Stability of the coexistence equilibrium
When travel time is included in the model (τ>0), the stability analysis of the coexistence steady state becomes more difficult and reveals destabilizing mechanisms. Throughout this section, we shall assume 0<h ∗<k. We linearize system (2.2) at the coexistence state by setting h i =h ∗+u i and p i =p ∗+v i for small perturbations u i ,v i . Keeping only the linear terms in the Taylor expansion of the right-hand side of Eq. 2.2 leads to the transcendental eigenvalue problem:
for nonzero (u 1,v 1,u 2,v 2). The coexistence state is stable if all solutions λ have negative real part.
System (3.2) admits a nonzero solution if and only if the determinant of the corresponding coefficient matrix is zero. Due to the symmetry of the system, this coefficient matrix can be expressed in the following form:
where I is the 2×2 identity matrix. Since J is a block-circulant matrix with 2×2 blocks, its determinant is given by detJ= det(J 1−λ I+J 2)⋅ det(J 1−λ I−J 2). Therefore, a nonzero solution of Eq. 3.2 exists if and only if det(J 1−λ I+J 2)=0 or det(J 1−λ I−J 2)=0.
These two conditions are equivalent to
where
The coexistence equilibrium of Eq. 2.2 is stable if and only if all characteristic roots of Eq. 3.2 have negative real parts; otherwise, it is unstable. To analyze (3.2), we rely on a result from Cooke and Grossman (1982) that states that a change of stability in our system can occur only if roots of Eq. 3.2 appear on the imaginary axis. For the convenience of the reader, we quote and explain this result in Appendix B.
Since we know the stability conditions for the coexistence state when d,α,τ are zero, we can ask whether those three parameters affect the stability by studying how zeros of Eq. 3.2 on the imaginary axis depend on those three parameters. For simplicity, we first treat the case α=0 separately in the next section and then move on to the general case.
Density-independent dispersal (α=0)
When α=0, the characteristic equations in (3.2) become
where we denoted
The expression 𝜖 A is precisely the trace of the community matrix of the Rosenzweig-MacArthur model (2.3) at the coexistence steady state. In particular, this steady state is stable on the single patch if and only if A<0.
Since zero is not a root of Eq. 3.3, and since complex roots appear in pairs, we look for roots λ=iy, with y>0. Splitting the equations in Eq. 3.3 into real and imaginary part gives the system
Case 1: A<0
When A<0, the steady state on the single-patch model is stable. The second condition in Eq. 3.5 becomes
and this condition is impossible to satisfy. Hence, no solutions of Eq. 3.3 can appear on the imaginary axis for any d,τ. Since the coexistence state is locally asymptotically stable for d=0,τ=0, it is also locally asymptotically stable for all d,τ>0. In particular, density-independent dispersal and travel time delays cannot destabilize a stable coexistence state in the absence of density-dependent dispersal.
Case 2: A>0
When the positive equilibrium is unstable for the single-patch model (2.3) (A>0), we ask whether and under which conditions dispersal and/or travel time delay can stabilize the system. As above, such a change in stability can only happen on a critical curve in the (τ,d)-plane on which the characteristic equations in (3.3) have a purely imaginary root.
When the dispersal rate is small, no such roots can appear, and the coexistence equilibrium cannot be stabilized by dispersal and/or travel time delay. More precisely, when 0≤d<𝜖 A/2, then the second condition in Eq. 3.3 becomes
which is impossible. Since the eigenvalues for τ=0 have positive real parts, they will have positive real parts for all τ>0, provided that 0≤d<𝜖 A/2. In dimensional parameters, this condition reads
When the dispersal rate is large enough, the coexistence equilibrium can be stabilized for some intermediate values of τ, but the relationship between d and τ where stabilization occurs is complex. To understand this relationship in detail, we summarize some of the analysis of the characteristic equations in (3.3), using the results by Cooke and Grossman (1982). For a fixed value d>𝜖 A>0 and τ=0, Eq. 3.3 with the plus sign has two solutions with negative real parts, whereas the equation with the minus sign has two solutions with positive real part, representing the fact that the coexistence state is unstable for the single-patch model. As τ increases from zero, the number of solutions of Eq. 3.3 with positive real part increases or decreases by two at certain values of τ that can be computed explicitly. If the number of solutions with a positive real part of Eq. 3.3 with the minus sign decreases before the number of such solutions to Eq. 3.3 with the plus sign increases, then the coexistence steady state can be stabilized. We now give a detailed description of these threshold values for τ.
We begin with Eq. 3.3 and the plus sign. According to Cooke and Grossman (1982), there are two sequences {τ n,1} and {τ n,2} defined by the relationships
We obtain these expressions from Eq. 3.5 by squaring, adding the equations, and solving for y. These sequences are increasing and nested i.e. τ 0,1<τ 0,2<τ 1,1<τ 1,2<…. As τ increases, the multiplicity of roots with a positive real part increases by two when τ passes through τ n,1 and decreases by two when τ passes through τ n,2 until some finite τ N,1, after which the multiplicity will remain positive.
Similarly, for Eq. 3.3 and the minus sign, there are increasing interlaced sequences {τ n,3} and {τ n,4} defined by
such that the total multiplicity of the roots with positive real parts decreases by two as τ increases and passes through any value of {τ n,3}, and increases by two when τ crosses {τ n,4}. With this notation, the coexistence equilibrium is stabilized by dispersal and travel time delay when τ 0,3<τ<τ 0,1. For the intermediate case \(\frac {\epsilon A}{2}<d<\epsilon A\), the analysis proceeds similarly to the case for large d. We omit the details.
The results from this analysis are summarized in Table 2 and illustrated in Figs. 1 and 2. The solid and starred curves in this figure correspond to τ n,1 and τ n,2; the dotted and dashed curves depict τ n,3 and τ n,4. The number of solutions a with positive real part (counting multiplicity) decreases by two when τ increases and passes through dotted and starred curves, and increases by two when τ crosses the solid and dashed curves. We observe one region in the (d,τ)-plane where the coexistence steady state is unstable for a single patch, but stable in the coupled two-patch system. We illustrate the time course of a typical solution in this region in Fig. 2. The densities exhibit decaying oscillations and eventually stabilize.

Stability region for density-independent dispersal and A>0. For any fixed d>0, the coexistence equilibrium is unstable when τ=0. As τ increases and crosses the dotted curve that corresponds to τ n,3, the coexistence steady state is stabilized. As τ increases further, it crosses the solid line corresponding to τ n,1, so that the coexistence equilibrium becomes unstable again. As τ increases and passes through a solid (τ n,1) curve or a dashed (τ n,2) curve, two eigenvalues with positive real part appear. When τ passes through a dotted (τ n,3) or starred (τ n,4) curve, two eigenvalues with positive real part disappear. In the figure, there is only one stability region, but if parameters were chosen such that the starred curve were shifted to the left, another region of stability would appear. Parameter values are 𝜖=1,k=2, and μ=0.2

Density-independent dispersal with travel time delay stabilizes the populations at the positive coexistence equilibrium. Parameters are as in the previous figure so that A=0.05>0, and dispersal parameters are chosen in the stable region as d=1,τ=2. Only the predator density on one patch is plotted. Densities on the other patch are indistinguishable after a short initial transient; prey densities in both patches follow the same pattern. In particular, the densities between patches are in synchrony. Stabilization occurs also for smaller values of τ, for example with 𝜖=0.8,τ=1, and d=4. The approach to equilibrium is then very slow (plot not shown)
We revert to dimensional variables and interpret these stability result in the light of condition (3.8). The first condition for the existence of the coexistence state (h ∗>0) is m<a or 1/m>1/a. The mean life expectancy for the predator has to be larger than the mean time to capture. The condition A>0 translates into a being much larger than m or 1/m≫1/a. The term in brackets in Eq. 3.8 is bounded by unity. The condition 1/a≪1/m then implies that inequality (3.8) is violated if D≫r/2 or 1/D≪2/r. Hence, if the mean time spent in a patch (1/D) is much shorter than the timescale of reproduction, then an unstable coexistence can be stabilized by dispersal (with delay) between two patches. Stabilization can occur when τ is on the order of unity, i.e., when the travel time delay is of the same order as the mean time to capture.
Predator-dependent dispersal (α>0)
When prey dispersal depends on perceived predation risk, a new phenomenon occurs, namely dispersal may destabilize an otherwise stable coexistence state. This result follows from a detailed analysis of the characteristic (3.2) along the lines of the previous section and using again the results in Section 5 of Cooke and Grossman (1982). As in the previous section, zero is not an eigenvalue, and we need to understand when purely imaginary roots of these equations occur. After lengthy calculations, we find that such roots occur if and only if the following inequality holds:
Since the term on the right is greater than 2B 𝜖, this inequality cannot be satisfied if the term in square brackets is negative, i.e., \(\alpha \gamma B+\epsilon A (\frac {\alpha \gamma }{\mu }B+(1-\alpha ))\leq 0.\) Hence, we get a negative upper bound for A that guarantees stability of the two-patch system:
Then, there is a window of opportunity for A ∗<A<0 where the coexistence state is stable in the absence of dispersal but could be destabilized by dispersal. We investigate this possibility in more detail.
The threshold value A ∗(α,γ) is strictly decreasing in both arguments, and A(0,0)=0. Hence, as the proportion (α) of predator-induced dispersal or its strength (γ) increases, the interval A ∗<A<0 of potential destabilization becomes larger. For each A ∗<A<0, there is a critical dispersal rate d ∗ for which inequality (3.9) becomes an equality. We can calculate
where
All else being equal, this threshold value increases with α; see Fig. 3.

The critical dispersal rate d ∗ is an increasing function of α, the strength of density-dependent dispersal. When d<d ∗, the stability of the coexistence equilibrium is the same as for α=0. When d>d ∗, the stability of the coexistence state can change, compared to the case with α=0, provided that the travel time delay, τ, is in the appropriate range (see text for details on that range). Parameters are 𝜖=1,γ=0.5,k=2, and μ=0.2. These choices lead to A=−1/20>A ∗
With these thresholds for A and d, we have several cases to consider; see Table 3. When A<A ∗, the coexistence state is stably independent of dispersal. When A ∗<A<0 and 0≤d<d ∗, the coexistence equilibrium is still stable. However, for A ∗<A<0 and d>d ∗, dispersal may destabilize the stable coexistence state for the single patch. A similar analysis as in the previous section (for more details, see Section 5 in Cooke and Grossman (1982)) gives a critical value τ ∗ such that coexistence is stable for all τ∈[0,τ ∗), but becomes unstable when the delay τ is larger. We illustrate this destabilizing effect in Fig. 4. We choose parameter values such that A ∗<A<0. Then the system is stable without dispersal but unstable with density-dependent dispersal, as the densities in Fig. 4 show.

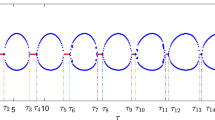
Sustained oscillations can arise from the interplay between density-dependent dispersal and travel time delay. The coexistence equilibrium of the two-patch system is unstable even though the coexistence state is stable on each patch in the absence of dispersal. The densities on the two patches oscillate out of phase. The large plots show the respective densities on one of the patches, while the insets show the corresponding densities on patch 1 (solid) and patch 2 (dashed). Parameter values are 𝜖=1,γ=0.5,μ=0.2,k=1,α=0.9,τ=2, and d=20. Accordingly, we calculate A ∗=−0.1459<A=−0.1<0; see text for details
Finally, when A>0, the situation is similar to Case 2 in the previous section, but explicit calculations are more cumbersome since they include additional terms with α. More specifically, one can define \(\bar {\tau }_{n,i}, i=1,2,3,4\) that act in the same way as τ n,i ,i=1,2,3,4 in the previous section. Specifically, the system can be stabilized when d>d ∗ and \(\tau \in (\bar {\tau }_{0,3}, \bar {\tau }_{0,1})\). In Fig. 5, we compare the region in the (d,τ)-plane where stabilization happens for different values of α. The case α=0 is the same as in Fig. 1. For α=1, the stability region is much narrower with respect to τ, at least for small d.

Illustration of how the stability region for A>0 in the d- τ-plane changes between density-independent (α=0) and density-dependent (α=1) dispersal. The dotted and solid curves for α=0 are the same as the curves bounding the stability region in Fig. 1. The range of τ-values for which stabilization occurs decreases significantly, at least for small enough values of d. Parameter values are the same as in Fig. 1
Discussion
The local conditions and mechanisms that affect the stability of a community have been studied intensely since the work by Rosenzweig and MacArthur (1963) and May (1973) and are, by now, fairly well understood. Our understanding of the effects of movement in spatially coupled communities on their stability is much less developed, but some principles have emerged in recent years. Movement between identical patches, either as density-independent dispersal (Jansen 1995) or as a density-dependent behavioral response (Hauzy et al. 2010), does not change the stability of the community on a single patch, as long as movement is instantaneous. Including movement time across a landscape in simple density-independent dispersal models may stabilize local populations, but never destabilizes local stable communities (Neubert et al. 2002; Klepac et al. 2007). We studied how density-dependent and independent dispersal and movement time interact to affect community stability.
We used a two-patch Rosenzweig-MacArthur model with prey-only dispersal. For density-independent dispersal, our results agree with and extend the previous results that including travel time acts as a stabilizing mechanism. Our main result is that the interplay between density-dependent dispersal and travel time between patches can destabilize the community even though neither of these mechanisms is destabilizing on its own. Our analysis also reveals that temporal scales over which this interplay operates are compatible with temporal scales over which travel time and density-dependent movement are expected to overlap in some natural systems. Since our analysis relies on local stability techniques, it is independent of the specific form of the functions chosen to model growth, consumption, and density-dependent dispersal. The overall results should hold more generally, as long as the general shape of the functions is similar, in particular, density-dependent movement decreases with conspecific density and increases with predator density.
Landscape heterogeneity and between-patch movement time
Landscape heterogeneity and geometry are crucial determinants of individual movement. Movement in heterogeneous landscapes is often idealized as individuals dispersing among focal patches where demographic processes take place (Goodwin and Fahrig 2002; Nystrand et al. 2010; Strevens and Bonsall 2011). Empirically, landscape matrix surrounding focal patches does affect movement patterns (Ricketts 2001) and travel time (Bélisle 2005) between patches. While some more recent theories have explored the effects of heterogeneous movement rates from patches (Hanski and Gilpin 1991; Hanski 2001), very few have explicitly included travel time between patches (Neubert et al. 2002; Klepac et al. 2007).
Often, travel time can be assumed to be much faster than demographic processes, thus supporting the assumption of instantaneous dispersal found in most theories. However, even arbitrarily short delays in dispersal can have very strong impacts on predicted synchrony of predator-prey oscillations between patches (Wall et al. 2013). Instantaneous and random dispersal has no direct stabilizing effect on an unstable equilibrium (Briggs and Hoopes 2004). Instead, low movement rate can only stabilize the metacommunity by maintaining asynchronous dynamics between patches (Taylor et al 1990). Our analytical study agrees with and generalizes previous numerical analyses (Klepac et al. 2007) showing a direct stabilizing effect of dispersal in the presence of delayed dispersal. Our analysis reveals how travel time and the timescale of movement can interact to stabilize oscillations. We show that intermediate travel time on the order of time to capture by the predator can actually allow strong dispersal rates to stabilize the otherwise unstable two-patch system (Fig. 2). In systems with sedentary predators and mobile prey, frequent prey movement and travel time approaching their life span provide sufficient decoupling between predator and prey densities to stabilize the equilibrium coexistence of the metacommunity. This prediction applies to prey with long-lived dispersing phases such as aquatic and marine species with long pelagic larval stage, interacting with sedentary predators that can have a much shorter or no pelagic larval phase (Kinlan and Gaines 2003; Kinlan et al. 2005)).
Density-dependent dispersal and timescales of movement
The many mechanisms and causes of movement and dispersal are typically greatly simplified in ecological models and implemented as either density-independent or density-dependent rates. Multiple mechanisms of animal movement are necessarily associated with multiple temporal scales (Nieminen 1996; Goodwin and Fahrig 2002) that can conflict with the simplicity of spatially explicit models (Cantrell and Cosner 1996; Auger et al. 2008). Predator-prey models based on demographic processes typically assume instantaneous and density-independent movement (Jansen 2001) on the same time scale as demographics. In contrast, predator avoidance or foraging behavior can trigger density-dependent movement on much faster timescales (Abdllaoui et al. 2007; Hauzy et al. 2007). In particular, the time to movement from a patch can be comparable to travel time between patches. Our results show that important dynamical phenomena emerge from integrating fast density-dependent trigger of movement with travel time over similar temporal scales (see Table 3). For example, frequent prey movement driven by density-dependent response to predator density can destabilize the metacommunity equilibrium if travel time is sufficiently close to the time to capture (see Fig. 4).
One important insight emerging from this result is that frequent movement is an important driver of stability when it is driven by a behavioral mechanism (predator avoidance), which makes the prediction broadly applicable to ecological systems. Even more importantly, our analysis shows how metacommunities can be destabilized by the interplay between several common properties (prey movement, predator avoidance, and travel time) when none of these properties is destabilizing on its own (Hauzy et al. 2010). Our specific predictions suggest that such destabilization could be observed in systems where frequent prey movement in response to predators is associated with long travel time. The effects of density-dependent dispersal and travel time are not only limited to community stability, but they also extend to the dynamics of nonequilibrium communities (Ramanantoanina et al. 2011). Hauzy et al. (2010) demonstrate that density-dependent dispersal can shift periodic to chaotic behavior. Travel time for density-independent dispersal can lead to a shift from in-phase to anti-phase locking in cyclic communities (Wall et al. 2013). The behavior observed in Fig. 4 points to a stable, anti-phase-locked situation. In future work, we shall explore the effect of density-dependent dispersal with travel time delay on the stability of the phase-locked solution and potential switches.
Future challenges
Our study predicts that movement driven by predator avoidance and travel time between habitats can destabilize metacommunities. Our model still includes relatively simplistic assumptions; for example, we only included travel time between patches. In reality, travel through unfavorable regions could induce mortality, particularly if dispersal is stress-induced (predator avoidance). By linking mechanisms on lower scales, one could derive expressions for travel time between patches and dispersal-induced mortality from multi-scale models for individual movement in continuous space (Cobbold and Lutscher 2014). Another avenue for future research is to include behavior-based dispersal of the predator as well. Specifically, the dispersal rate of the predator should decrease as a function of prey density. Some work in this direction was already started, when the prey movement rate depends on predator density alone (Abdllaoui et al. 2007; Mchich et al. 2005, 2007). Despite its limitations, our study contributes to the integration of complex effects of landscapes and behavior on movement, to a general theory of metacommunity stability. As our study suggests, this integration and its application to natural systems depend on the explicit assessment of temporal and spatial scales associated with natural landscapes and life histories of species that control movement.
References
Abdllaoui AE, Auger P, Kooi BW, De la Parra RB, Mchich R (2007) Effects of density-dependent migrations on stability of a two-patch predator–prey model. Math Biosci 210(1):335–354
Abrams P, Ruokolainen L (2011) How does adaptive consumer movement affect population dynamics in consumer resource metacommunities with homogeneous patches? J Theor Biol 277:99–110
Abrams PA (2007) Habitat choice in predator-prey systems: spatial instability due to interacting adaptive movements. Am Nat 169(5):581–594
Auger P, de La Parra RB, Poggiale J-C, Sánchez E, Sanz L (2008) Aggregation methods, in dynamical systems and applications in population and community dynamics. Physics of Life Reviews 5(2):79–105
Bélisle M (2005) Measuring landscape connectivity: the challenge of behavioral landscape ecology. Ecology 86(8):1988– 1995
Briggs CJ, Hoopes MF (2004) Stabilizing effects in spatial parasitoid–host and predator–prey models: a review. Theor Popul Biol 65(3):299–315
Cantrell R, Cosner C (1996) Models for predator-prey systems at multiple scales. SIAM Rev 38(2):256–286
Chakraborty A, Singh M, Lucy D, Ridland P (2007) Predator-prey model with prey taxis and diffusion. Math Comput Model 46:482–498
Cobbold C, Lutscher F (2014) Mean occupancy time: linking mechanistic movement models, population dynamics and landscape ecology to population persistence. J Math Biol 68:549–579
Cooke KL, Grossman Z (1982) Discrete delay, distributed delay and stability switches. J Math Anal Appl 86(2):592–627
Cuddington K, Yodzis P (2002) Predator-prey dynamics and movement in fractal environments. Am Nat 160:119–134
Goodwin BJ, Fahrig L (2002) Effect of landscape structure on the movement behaviour of a specialized goldenrod beetle, Trirhabda borealis. Can J Zool 80(1):24–35
Hanski I (2001) Spatially realistic theory of metapopulation ecology. Naturwissenschaften 88(9):372–381
Hanski I, Gilpin M (1991) Metapopulation dynamics: brief history and conceptual domain. Biol J Linn Soc 42(1-2):3–16
Hauzy C, Hulot FD, Gins A, Loreau M (2007) Intra-and interspecific density-dependent dispersal in an aquatic prey–predator system. J Anim Ecol 76(3):552–558
Hauzy C, Gauduchon M, Hulot FD, Loreau M (2010) Density-dependent dispersal and relative dispersal affect the stability of predator–prey metacommunities. J Theor Biol 266(3):458–469
Jansen VA (1995) Regulation of predator-prey systems through spatial interactions: a possible solution to the paradox of enrichment. Oikos:384–390
Jansen VA (2001) The dynamics of two diffusively coupled predator–prey populations. Theor Popul Biol 59 (2):119–131
Kinlan BP, Gaines SD (2003) Propagule dispersal in marine and terrestrial environments: a community perspective. Ecology 84(8):2007–2020
Kinlan B P, Gaines S D, Lester SE (2005) Propagule dispersal and the scales of marine community process. Divers Distrib 11(2):139–148
Klepac P, Neubert MG, van den Driessche P (2007) Dispersal delays, predator–prey stability, and the paradox of enrichment. Theor Popul Biol 71(4):436–444
Kot M (2001) Elements of mathematical ecology. Cambridge University Press, Cambridge
May RM (1973) Stability and complexity in model ecosystems. Princeton University Press, Princeton
McCauley E, Wilson W, de Roos A (1993) Dynamics of age-structures predator-prey interactions: individual based models and population level formulations. Am Nat 142:412– 442
Mchich R, Bergam A, Raïssi N (2005) Effects of density dependent migrations on the dynamics of a predator prey model. Acta Biotheor 53(4):331–340
Mchich R, Auger P, Poggiale J-C (2007) Effect of predator density dependent dispersal of prey on stability of a predator–prey system. Math Biosci 206(2):343–356
Nathan R, Giuggioli L (2013) A milestone for movement ecology research. Movement Ecology 1:1
Neubert M G, Klepac P, Van den Driessche P (2002) Stabilizing dispersal delays in predator–prey metapopulation models. Theor Popul Biol 61(3):339–347
Nieminen M (1996) Migration of moth species in a network of small islands. Oecologia 108(4):643–651
Nystrand M, Griesser M, Eggers S, Ekman J (2010) Habitat-specific demography and source–sink dynamics in a population of Siberian jays. J Anim Ecol 79(1):266–274
Ramanantoanina A, Hui C, Ouhinou A (2011) Effects of density-dependent dispersal behaviours on the speed and spatial patterns of range expansion in predator–prey metapopulations. Ecol Model 222(19):3524–3530
Ricketts TH (2001) The matrix matters: effective isolation in fragmented landscapes. Am Nat 158(1):87–99
Rosenzweig ML, MacArthur RH (1963) Graphical representation and stability conditions of predator-prey interactions. Am Nat 97(895):209
Ruokolainen L, Abrams P, McCann K, Shuter B (2011) The roles of spatial heterogeneity and adaptive movement in stabilizing (or destabilizing) simple metacommunities. J Theor Biol 291:76–87
Sapoukhina N, Tyutyunov Y, Arditi R (2003) The role of prey taxis in biological control: a spatial theoretical model. Am Nat 162:61– 76
Strevens CM, Bonsall MB (2011) Density-dependent population dynamics and dispersal in heterogeneous metapopulations. J Anim Ecol 80(1):282–293
Taylor AD et al (1990) Metapopulations, dispersal, and predator-prey dynamics: an overview. Ecology 71 (2):429–433
Wall E, Guichard F, Humphries AR (2013) Synchronization in ecological systems by weak dispersal coupling with time delay. Theoretical Ecology 6(4):405–418
Acknowledgments
YZ is partly supported by the Centre de Recherches Mathématiques (Montréal) through the pan-Canadian thematic year “Model and methods in ecology, epidemiology and public health (2013)”. FL gratefully acknowledges funding from the Natural Science and Engineering Research Council of Canada (NSERC). FG acknowledges support from NSERC through the Canadian Healthy Oceans network (CHONe).
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix A: Stability of the coexistence steady state when τ=0
In this appendix, we demonstrate that the coexistence steady state for the two-patch model (2.2) with τ=0 is stable if and only if the coexistence state is stable for the single-patch model (2.3). The transformation introduced in Hauzy et al. (2010) gives a block-diagonal matrix whose stability properties can easily be determined.
We denote the vector of densities on patch i with X i =(h i ,p i )T. Then system (2.2) with τ=0 can be written as
where
The crucial transformation consists of the change of variables: U=(X 1+X 2)/2,V=(X 1−X 2)/2. Then, system (4.1) is equivalent to
Linearizing system (4.2) at the coexistence state U ∗=(h ∗,p ∗)T,V ∗=(0,0)T, we get the linear system
where D F(⋅) and D G(⋅) denote the Jacobian matrix of functions F and G, respectively. This system is in block-diagonal form, and the steady state is stable if all eigenvalues of the two matrices D F(U ∗) and D F(U ∗)−2D G(U ∗) have negative real parts.
We calculate both matrices.
and D F(U ∗)−2D G(U ∗)=
Since the determinants of both matrices are positive, stability depends on the sign of the two traces. Since the trace of the second matrix is smaller than the one of the first, the coexistence state is stable precisely when the trace of D F(U ∗) is negative. But the matrix D F(U ∗) is precisely the community matrix of the single-patch Rosenzweig-MacArthur model (2.3).
The same method gives the additional result that (k,0,k,0) is stable for Eq. 2.2 if and only if (k,0) is stable for the single-patch system. That is, the local stability of symmetric equilibria does not depend on the values of d and α.
Appendix B: Zeros of a transcendental polynomial
A key element in our analysis is the control of eigenvalues with a positive real part of the linearization at the coexistence state. The following lemma from (Cooke and Grossman 1982) shows that in our case, an eigenvalue with a positive real part can only appear by passing through the imaginary axis and not, for example, in a saddle-node bifurcation. For ease of referral and convenience of the reader, we state this not-so-well-known lemma here.
Lemma 4.1 (Cooke and Grossman (1982))
Let f(λ,τ)=λ 2 +a 1 λ+a 2 λe −τλ +a 3 +a 4 e −λτ , where a i and τ are real numbers and τ≥0. Then, as τ varies, the sum of the multiplicities of zeros of f in the open right half-plane can change only if a zero appears on or crosses the imaginary axis.
Rights and permissions
About this article

Cite this article
Zhang, Y., Lutscher, F. & Guichard, F. The effect of predator avoidance and travel time delay on the stability of predator-prey metacommunities. Theor Ecol 8, 273–283 (2015). https://doi.org/10.1007/s12080-015-0269-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12080-015-0269-5