
Abstract
This paper presents a new sensorless speed control technique for a laboratory-fabricated PM-BLDC motor prototype. The technique utilizes 3rd harmonic components of phase-induced emfs to estimate rotor-position pulses and corresponding speed signal. The two-loop control technique employs PI controllers, feed-forward voltage principles and an estimated average DC-link current. Results are presented in detail for different intermediate stages.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
This paper presents a state-of-the-art technique for the position and speed sensorless control of a closed-loop Brush-less DC (BLDC) drive. Obtaining accurate rotor position information is necessary for both open-loop and closed-loop control [1, 3, 4]. The challenges associated with shaft-mounted position/speed sensors [5] include operational failure, asymmetric placement of position sensors, reduced reliability of operation, and mechanical faults.
To address these challenges, the paper proposes a technique for estimating rotor position information from the feedback voltage and current signals [4] using the 3rd harmonic component of phase emfs. This method [6, 7] is more reliable, cost-effective, and suitable for a Surface-mounted Permanent Magnet (SPM)-BLDC motor with variable speed operation. The 3rd harmonic emf signal has lower filtering requirements compared to other back emf-based methods and is free from PWM switching frequency-induced noise [6, 7]. The paper also presents a synchronisation technique for the estimated rotor-position pulses with the line emfs to ensure the stability of the motor under all conditions. An appropriate speed estimation technique has also been implemented utilizing those estimated position pulses.
Overall, the proposed position sensorless control scheme is a novel contribution to the field of BLDC motor control. The technique has been implemented on a laboratory-fabricated 0.75 hp, 4-pole, 1500 r.p.m. SPM-BLDC motor prototype.

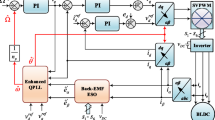
Schematic for the position sensorless closed loop speed control technique of a SPM-BLDC motor using an estimated DC current signal (AQ: Fig. should be written as figure).
2 Position sensorless closed-loop speed control
To implement a position sensorless strategy, at first, the rotor-position pulses are estimated based on 3rd harmonic emf integration method with proper synchronisation technique. After that, using these estimated position pulses, the speed of the motor is estimated. Finally, using these position pulses and speed signal, the closed loop speed control scheme is implemented.

Equivalent circuit model of a SPM-BLDC motor along with the controlled 3-phase inverter.
The closed loop speed control (CLSC) consists of an outer speed control loop (SCL)and an inner current control loop (CCL) [8] as shown in figure 1. The speed-loop is conventionally based on a PI-controller while for the inner current-loop is based on DC-link current feedback [10]. In this case, the DC-link current is estimated from the phase current signals. As the reference and feedback current signals both are DC, the PI-controller based current loop design and its tuning is easier.
2.1 Position estimation: 3rd harmonic emf integration based technique
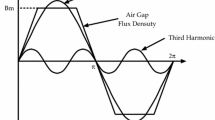
A 3rd harmonic emf integration based position estimation technique [6, 9] for a SPM-BLDC motor has first also been implemented here. The summation of the three stator phase voltages requires access to the neutral point of the stator. The method implemented here is based on the fact that in symmetrical three phase Y-connected motor with trapezoidal air gap flux distribution, the summation of the three stator phase voltages results in an elimination of all fundamental and \(6n\pm 1\) components and only the zero sequence triplen components (3n) remain.

The most important idea is that the zero sequence emf components with the 3rd harmonic emf (e3) can be used to generate rotor-position information pulses with the help of sequential and combinational logic, based on the principle of inverter device commutation.
LPF (\(\omega _c\)=500Hz) used to reduce high frequency and switching frequency components from 3rd harmonic voltage.
HPF is used to reduce DC offset voltage by 6.66% of rated 3rd harmonic frequency (150 Hz). By integrating this voltage we obtain third harmonic flux linkage (\(\lambda _3\))
The overall TF T(s) = \(\frac{\lambda _{3} (s) }{v_3(s)}\) can be expressed as,
2.1.1 Generation of commutation signal:
To generate commutation signal (CS), \(\lambda _3\) is fed to a ZCD. To avoid multiple zero crossings, a SR flip-flop based comparator (with hysteresis band, figure 4) has been used here.

Hysteretic comparator based ZCD used to generate commutation signal.

Experimental waveforms of R-phase induced emf (\(e_{RN}\)) and 3\(^{rd}\) harmonic voltage (\(v_3\)) and commutation signal (CS).
CS signals are used to generate rotor-position information pulses.
2.1.2 Estimation of rotor-position information pulses:
The rotor-position information pulses are estimated from the CS using 2 sets of 3-bit Johnson Ring-Counter (JRC) and combinational logic.
Figure 6 shows the experimental waveforms of JRCs output pulses (X2, Y2), \(H1_e\) and \(e_{RY}\).
Now, using the estimated \(H1_e\), \(H2_e\) and \(H3_e\), the appropriate logic pulses of the 3-phase VSI devices (six) have been generated, following,\(\begin{aligned} Q_1&= H1_e \overline{H3_e}, Q_4= \overline{H1_e} H3_e, Q_3= \overline{H1_e} H2_e ,\\ Q_6&= H2_e \overline{H1_e}, Q_5= \overline{H2_e} H3_e , Q_2= H2_e \overline{H3_e} \end{aligned}\). The VSI is operated in synchronism with the rotor position and speed in closed loop mode, using logic-pulses as mainswitching pulses.

Experimental waveforms: \(e_{RY}\), \(H1_e\), X2& Y2.

Logic and corresponding waveforms to generate RST1 pulse for position pulse synchronisation.

Schematic of speed estimation logic.
2.1.3 Synchronisation of position information pulses with the line emfs:
The estimated position information pulses must be synchronised with the line emfs using external signals. The X\(_{2,1,0}\) JRC can be reset using e\(_{BY1}\) emf and a low pass filter (LPF) at 200 Hz. RST1 and RST2 pulses ensure H1\(_{e}\), H2\(_{e}\) and H3\(_{e}\) remain in synchronism with line induced emfs during sudden speed transients.
2.2 Speed estimation
Speed estimation [7] of a motor is essential for the closed-loop position sensorless control operation. We know that, angular speed, \(\omega _m\) \(\triangleq \) \(\frac{\triangle \theta _m}{\triangle t}\) = \(\frac{2\pi _m}{ T}\). The value of time period T is calculated from the estimated position information pulses, which are OR’ed and then ’AND’ed with a high frequency pulse (HFP). The SHF pulse train is used as the clock input of an up-counter, which is reset by the falling edge of SB.

Experimental waveforms: \(S_A\), \(S_B\), \(S_{HF}\), Rmp1, T & \(\omega _m\) for speed estimation.
A low pass filter (LPF) with a cut-off frequency (\(f_c\)) of 100 Hz is introduced in the feedback loop to reduce the speed ripple.
2.3 Closed loop speed control of the BLDC motor
2.3.1 Estimation of average DC-link current [10]:
The modulus of the individual current signal has been generated using a multiplexer and comparator pair with a small hysteresis band. The estimated current signal is proportional to the magnitude of the moving average over a switching time period of the DC-link current (\(<i_{dc}>_{T_{sw}}\)). Feed-forward voltage is added to the PI-controller output and compared with a saw-tooth to generate the PWM signal, which is then ’AND’ed with the main logic pulses of VSI upper switches.
2.3.2 Modelling of a SPM-BLDC motor:
The dynamic machine model [3] of a SPM-BLDC motor, during each 60\(^o\) interval of VSI conduction, is described by in Laplace domain,,
Based on (1) to (3) the CCL and SCL have been designed
The details of the two-loop controller as implemented on the SPM-BLDC motor is given in table 1. The bandwidth of current loop is 500Hz while the speed loop bandwidth is 10 Hz.

Experimental waveforms under closed loop control: Estimated position pulse (\(H1_e\)), R & Y-phase voltages (\(v_{RN}\) & \(v_{YN}\)) at rated speed (1500 r.p.m or 157 rad (mech.)/s) with rated load torque (3.56 N-m).

Experimental waveforms under closed loop control: Estimated position pulse (\(H1_e\)), & Y-phase current (\(i_R\) & \(i_R\)) and estimated speed (\(\omega _m\)) at rated speed (1500 r.p.m) with rated load torque (3.56 N-m) on the SPM motor.
2.4 Results of the closed loop control
In this section, the experimental waveforms along with the experimental readings have been presented.
Figure 10 to figure 11 shows the simulated and experimental waveforms of the BLDC motor under CL control in the steady state (SS). For CL operation the estimated position pulses, EPP (\(H1_e\), \(H2_e\) & \(H3_e\)) and speed signal (\(\omega _m\)), estimated from position information, have been utilised.
The steady-state waveforms are taken at the rated speed of 1500 r.p.m (i.e., 157 rad(mech.)/s) with rated load (560W). Figure 10 shows the experimental waveforms of estimated position pulse (\(H1_e\)), R and Y-phase voltage (\(v_{RN}\) & \(v_{YN}\)) with a rms value of 164 V for the both cases. The phase current waveforms \(i_R\) & \(i_Y\) are quasi-square in shape with a rms value of 1.4 A (rated load current).
3 Conclusions
This paper presents a novel position sensorless closed-loop speed control method SPM-BLDC motor. The proposed method uses a 3rd harmonic emf integration based rotor-position estimation method, which is synchronized with line emfs to maintain transient stability during speed and load variations. A speed estimation method is also implemented using position pulses, suitable for low-resolution rotor-position pulses. The closed-loop control strategy involves outer speed and inner current loops with feed-forward voltage control and PI-controller for achieving fast response. The study highlights the synchronisation procedure of the rotor-position pulses, speed estimation technique, estimation of average DC-link current signal used as current feedback, and successful implementation in a closed-loop drive, which are hardly available in published literature.
References
Pillay P and Krishnan R 1991 Application characteristics of permanent magnet synchronous and brushless DC motors for servo drives. IEEE Trans Ind. Appl. 27(5): 986–996
Jahns T M 1994 Motion Control with Permanent-Magnet AC Machines., IEEE Proc. 82(8):1241 - 1252
Jahns T M 1984 Torque Production in Permanent-Magnet Synchronous Motor Drives with Rectangular Current Excitation. IEEE Trans. Ind. Appl. IA-20(4): 803-813
Matsui N and Shigyo M 1992 Brushless DC motor control without position and speed sensors.IEEE Trans. Ind. Appl. 28(1):120-127
Real G, Carlos J and Gomez-Gil J 2010 Position and Speed Control of Brushless DC Motors Using Sensorless Techniques and Application Trends. Sensors, MDPI. 10(7): 6901–6947
Moreira J 1996, Indirect sensing for rotor flux position of permanent magnet a.c. motors operating in a wide speed range. IEEE Trans. Ind. Appl. 32(6): 401-407
Shen J X and Iwasaki S 2006 Sensorless control of ultrahigh-speed PM brushless motor using PLL and third harmonic back EMF IEEE Trans. Ind. Electron. 53(2): 421–428
Zhu Z Q, Liu Y and Howe D 2005 Comparison of Performance of Brushless DC Drives under Direct Torque Control and PWM Current Control. proc. Int. Conf. on Electrical Machines and Systems :1486-1491
Shen J X, Zhu Z Q and Howe D 2004 Sensorless Flux-Weakening Control of Permanent-Magnet Brushless Machines Using Third Harmonic Back EMF. IEEE Trans. Ind. Appl. 40(6): 1629–1636
Dixon J W and Leal L A 2002 Current control strategy for brushless DC motors based on a common DC signal. IEEE Trans. Power Electron. 17(2): 232–240
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Mukherjee, P., Paitandi, S. & Sengupta, M. Sensorless speed control of a laboratory fabricated SPM-BLDC motor prototype. Sādhanā 48, 236 (2023). https://doi.org/10.1007/s12046-023-02305-x
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s12046-023-02305-x