
Abstract
Effect of torsional ground motion is considered in the seismic codes indirectly by considering accidental eccentricity which also includes uncertainties in storey masses and stiffnesses of structural elements of the buildings. However, there is no explicit mention of the effect of torsional ground motion on the response for different types of buildings including soil–structure interaction (SSI), as it is reported in the literature that torsionally flexible low-rise buildings are susceptible to torsional ground motion. A systematic study has been carried out on the effect of torsional ground motion including SSI on the response of torsionally flexible through torsionally stiff multistorey buildings. The effect of torsional ground motion resulting from the propagation of motion through different soil mediums: firm soil, medium-firm soil and soft soil is reported in the study. For these soil mediums, two cases of ground motion: (i) translation ground motion only and (ii) combined translation and torsional ground motion are considered. A set of multistorey buildings with fundamental period of vibration T = 0.3 s and T = 0.8 s having frequency ratios Ω = 0.65, 1.0 and 1.5 (Ω = ratio of uncoupled fundamental torsional frequency, ωθ to uncoupled fundamental translational frequency, ωt) is considered. These chosen buildings cover practically the entire spectrum of torsionally flexible and torsionally stiff low-rise buildings. Frequency domain analysis has been carried out to incorporate SSI effects. The results obtained from the frequency domain have been transformed into the time domain using Fast Fourier Transform (FFT) and the storey shears obtained from ten earthquake time histories (translation and torsional) have been averaged. It is found that the torsional ground motion effect is significant in the case of torsionally flexible buildings with low periods of vibration and the effect of SSI is insignificant in all types of buildings. Further, the combined effect of torsional ground motion and soil–structure interaction on the distribution of storey shears along the height varies significantly for high period buildings (T =0.8s).
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Recorded translational ground motion histories are available but no actual records of the rotational ground motion have been obtained till date. Kozák [1] reported that seismic torsional motion effects might be responsible for the distortion of an obelisk in the San Bruno monastery following the 1783 Calabria earthquake and many illustrations and observations as evidence of the effect of rotational ground motions were presented. Zerva et al [2] reported that torsional ground motion may be the potential contributing factor that may affect the seismic response of structural systems. Even though the studies regarding the torsional ground motions date back to the mid-nineteenth century, the torsional component of ground motion has been considered only in a limited number of studies. The effect of spatial variation of ground motion (torsional ground motion) on the response of structures has also been considered by taking translational ground motions at individual supports. Spatial variation of the ground motion that produces torsion was considered by applying it to individual supports of symmetric, mono asymmetric and two-way asymmetric buildings [3,4,5,6].
The effect of torsional ground motion on the response of structures was studied and it was found that there is a significant increase in the response for buildings with low fundamental periods T and low frequency ratios Ω (Ω = ratio of uncoupled fundamental torsional frequency, ωθ to uncoupled fundamental translational frequency, ωt) [7, 8]. Similarly, Hao [9] reported that effect of torsional ground motion is significant for lower values of T and lower values of apparent wave velocity, Va, (function of shear wave velocity, Vs and angle of incidence of propagating waves, θ). Very limited work on the effect of torsional ground motion including soil-structure interaction (SSI) effects is reported. Spatial variation of ground motion (wave passage effect only) has been considered by taking different time lags in translational ground motions at the supports of a plane frame, incorporating SSI, [10]. However, the torsional response reported in these studies is based on a model of single storey building.
For multistorey buildings subjected to torsional ground motion, some studies have been reported, [11,12,13]. These studies have been carried out on highly torsionally stiff symmetric multistorey frame buildings for different aspect ratios (length to width ratio of the building). As expected only a small effect had been found on such types of buildings. Similarly, Basu et al and Loghman et al [14, 15] investigated the seismic behaviour of seismically isolated buildings subjected to rotational components of ground motions. It is reported that the response of seismically isolated buildings could be significantly amplified due to torsional ground motion [14], whereas, Loghman et al [15] reported 33.75% amplification in the base shear and 120% amplification in roof acceleration due to the inclusion of torsional ground motion in the buildings that have a square plan and higher slenderness ratio. They also observed that the effect of torsional ground motion on roof acceleration increases for the buildings that have higher aspect ratios. In another study, Basu et al [16] proposed an alternative procedure that accounts for both accidental eccentricity produced due to uncertainties in mass and stiffness distribution as well as torsional ground motions. Recently, Guidotti et al [17] have reported an increase of 15% in inter-story drift in tall buildings due to the inclusion of near field ground motions with their torsional components. Further, it is reported that the effect of torsional ground motion on the floor acceleration of structures with a relatively short torsional period of vibration may be significant [18]. Compilation of analytical studies and findings associated with the response of structures due to torsional ground motion have been reported by Anagnostopoulos et al [19] in a review paper. In these studies it was concluded that overall seismic response of structures with varying dynamic properties and, with various geometric irregularities could be adversely affected by the torsional components of ground motions. In all these studies [12, 13, 19] the effect of torsional ground motion on the seismic response of multistorey buildings has been reported. Recently effect of torsional ground on the response of multistorey buildings with fixed foundation is reported by Bhat et al [20, 20]. In this study it is reported that there is a significant increase in the response of flexible buildings with low period of vibration. However, there is no study available that has taken into account the effects of soil medium i.e. incorporating SSI effects and torsional ground motion.
Practically no work is available in literature on the distribution of storey shears along the height of multistorey buildings subjected to torsional ground motion and incorporating SSI. A comprehensive study for multistorey buildings subjected to torsional ground motion incorporating SSI is required, to take into account the effect of governing parameters: Vs or Va (soil type), Ω and T on the distribution of storey shears along the height of stiffening elements of these buildings. In this paper, studies are reported in this direction.
Systematic studies have been carried out for the entire range of governing parameters for the low-rise buildings for which the effect of torsional ground motion is significant. The values of structural properties of buildings for chosen values of pairs of parameters T and Ω are arrived at by an iterative process.
2 Simulation of earthquake ground motions
Due to the absence of appropriate sensors, it is neither possible nor feasible to measure torsional ground motion directly and reliably [14, 21, 22]. Therefore, many researchers have derived torsional ground motion from their translational components using kinematic source models or the elasto-dynamic theory of wave propagation. Three analytical methods were proposed by Basu et al [14] to extract rotational components of ground motions from their translational components. Torsional accelerograms compatible with artificial translational accelerograms with a given proportion of surface and body waves were also developed, [23]. But none was tested against an estimated torsional ground motion from field measurements. De La Llera and Chopra [7, 8] estimated the torsional ground motion numerically at the basement of 30 buildings during the 1994 earthquakes of California. Similarly, torsional ground motions were also estimated numerically using recorded spatially varying translational ground motions, [21, 24,25,26]. But no explicit formula for estimating torsional ground motion was presented. Hao [9] estimated torsional ground motion numerically from SMART-1 array and presented a power spectral density function (psdf) of the torsional ground motion at a point on the ground surface taking both phase shift and coherency loss effect into consideration. This torsional psdf was verified with psdf of estimated torsional ground motion obtained from actual records of translation from SMART-1 array. The proposed power spectral density function for torsional acceleration is of the form given below and has been used for the simulation of torsional ground motions in the present study.
where Sg (ω) = translational motion (acceleration) power spectral density function, Va = apparent wave velocity of the propagating wave and \({\alpha }_{1}\left(\omega \right) \& {\alpha }_{2}\left(\omega \right)\) frequency dependent parameter functions that take into account the coherency loss effect and are expressed in the form
in which aj and bj are determined by the regressive method from the recorded motions of SMART-1 array. Three sets of values for aj and bj for low, medium and high coherency have been proposed in [9]: aj = 1.0 \(\times \) 10-7, bj = 1.16, j = 1,2 for high coherency, aj = 5.0 \(\times \) 10-6, bj = 2.00, j = 1,2 for low coherency and a1 = 1.1160 \(\times \) 10-6, b1 = 1.66726, a2 = 1.1593 \(\times \) 10-6, b2 = 1.72263, for medium coherency. The values of aj and bj (j = 1, 2) corresponding to medium coherency have been used in the present study.
The apparent wave velocity \({V}_{a}\), is a function of shear wave velocity of the medium \({V}_{s}\) and angle of incidence θ of the propagating wave with the vertical and is expressed as
where \(\phi \) (in radians) = principal direction of the ground motion.
The values of \(\phi \), \({V}_{s}\) and corresponding \({V}_{a}\) have been reported by O’Rourke et al [27] for the San Fernando earthquake in February 1971.
The translational motion power spectral density function used by Hao [9] in the derivation of torsional psdf is a filtered Tajimi–Kanai spectrum and has been used in the present study.
where \({S}_{0}\)= scale factor depending on the ground motion intensity, \({\omega }_{g}\) and \({\omega }_{s}\) = central ground frequency and central frequency of high pass filter in rad/s respectively and \({\xi }_{g}\) and \({\xi }_{s}\) = damping at central ground frequency and damping at central filter frequency respectively.
Hindy and Novak [28] proposed values of \({\omega }_{s}/ {\omega }_{g}\) and \({\xi }_{g}/ {\xi }_{s}\) as 0.1 and 1.0, respectively. For different soil conditions values of \({\omega }_{g}\) and \({\xi }_{g}\) have been reported, [9, 29]. The values of \({\omega }_{g}\) for the three types of soils, firm soil, medium-firm soil and soft soil were respectively presented as: \({\omega }_{g}\) = 31.416 rad/s, 15.70 rad/s and 6.283 rad/s respectively [9]. The values of ξg adopted in the study have been taken as \({\xi }_{g}\) =0.35, 0.45 and 0.55 for firm soil, medium-firm soil and soft soil respectively, [29].
The translational motion (acceleration) psdf for firm, medium-firm and soft soils are shown in figure 1(a). The corresponding torsional motion (acceleration) psdf are shown in figure 1(b) for θ = 10°. From the psdf of translational ground motion it is seen that a large amount of energy is present over a broader frequency band for firm soil and medium-firm soil, whereas for soft soil the energy is centered in a narrow band due to the filtering of higher frequencies. From the torsional ground motion psdf it is seen that the energy is distributed over a large frequency range in comparison to the translational motion psdf.

Power spectral density function: (a) translational motion psdf, (b) torsional motion psdf.
Earthquake ground motions (translation/torsion) have been simulated assuming that any periodic function, \({\ddot{u}}_{g}(t)\) can be expanded into a series of sinusoidal waves having random phase angles uniformly distributed between 0 and 2π and having amplitudes determined from the power spectral density function, which can be expressed as
where \({A}_{j}\) = amplitude, \({\omega }_{g}\) = frequency in rad/s and \({\Phi }_{j}\) = phase angle of jth sinusoidal wave distributed between 0 and 2π. The amplitudes of jth sinusoidal wave with frequency interval Δω are given by: \({A}_{j}=\sqrt{(4S\Delta \omega )}\), where \(S\) = power spectral density function of the ground motion (\({S}_{g}\) for translational ground motion and \({S}_{\theta z}\) for torsional ground motion).
The transient character of an earthquake can be accounted for by multiplying the periodic function \({\ddot{u}}_{g}\left(t\right)\) by an envelope function. The envelope function used, is a Bogdanoff type, and the final expression for the generation of the simulated earthquake time histories (translation/torsion) in the present study is
where a =0.206 and b = 0.0078 are two constants. Torsional ground motions are out of phase by − π/2 from translational ground motions, [21, 30]. Thus, a phase difference of − π/2 is introduced in Eq (6) for torsional ground motion.
Velocity response spectra are developed here to validate the ground motion time histories generated, based on Eq (6), for Ω = 1.0 and peak ground acceleration, pga = 1g. These spectra are in good agreement when compared with those reported by Hao [9] (figure 2).

Comparison of velocity response spectra for translation and torsion: (Va=1000 m/s; ωg=2.5 Hz.; ξg=0.6; pga=1.0 g).
3 Modeling and equations of motion
Multistorey buildings comprising of frames as stiffening elements are considered. Floor slabs of these buildings are assumed to have infinite in-plane rigidity and no bending stiffness. Mass of each storey is lumped at the corresponding floor level. Figure 3 shows the superstructure-foundation system (interaction system) consisting of the superstructure and the raft as foundation system. As shown in figure 3b each floor is assumed to have 3 degrees of freedom (d.o.f.); a translation along each of the two orthogonal axes in the plane of the floor and a rotation about a vertical axis through the c.g. (centre of gravity) of the raft. The raft is assumed to have 5 d.o.f. (figure 3c), a translation along each of the two orthogonal axes in the horizontal plane, a rotation about each of the two axes and a rotation about the vertical axis again through the c.g. of the raft. The interaction system is subjected to horizontal free field motion in x or y directions and torsional ground motion about the z-axis.

Interaction system of building model: (a) schematic presentation of building, (b) degrees of freedom in global coordinates and (c) degrees of freedom of the raft.
The superstructure-foundation system is treated as two substructures: superstructure and foundation. The governing equations of motion are written separately for each substructure.
3.1 Equations of motion for the superstructure
Displacements at any floor level result from the movement of the raft and the structural displacements of the floor with respect to the raft. The contribution to the floor displacements, {qr} from the movement of the raft is given by
in which, \(\{{q}_{g}{\}}^{T}=\{\begin{array}{ccc}{q}_{gx}& {q}_{gy}& {q}_{\theta z}\end{array}\}\), where \({q}_{gx}\) and \({q}_{gy}\) are free field translational ground motions in x and y directions respectively and \({q}_{\theta z}\) is the torsional ground motion about the z-axis, \(\{{q}_{0}{\}}^{T}=\{\begin{array}{cc}{q}_{0x}& {q}_{0y}\end{array} \begin{array}{ccc}{\theta }_{y}& {\theta }_{x}& {\theta }_{z}\end{array}\}\), in which \({q}_{0x}\) and \({q}_{0y}\) are translations of the raft in x and y directions respectively and
\({\theta }_{x}\) \({\theta }_{y}\) and \({\theta }_{z}\) are rotations of the raft about x, y and z axes respectively and matrices A (3N x 3) and B (3N x 5) are of the form
where \({h}_{i}=(1 \ to \ N)\) = height of ith floor from the c.g. of the raft, figure 3.
As stated earlier in addition to the above displacements, floors undergo structural displacements relative to the raft; let {q} be the vector of structural displacements. Equations of motion of the superstructure now are
where \(\left[M\right]\), \(\left[K\right]\) and \(\left[C\right]\) are mass, stiffness and damping matrices in global co-ordinates respectively. The total displacement vector, \(\left\{{q}^{t}\right\}\) can be expressed as
Substituting {qr} and {qt} from Eq. 7 and Eq. 9, Eq. 8 becomes
3.2 Equations of motion for the raft
The raft is acted upon by the forces from the superstructure as well as the reactive forces from the soil. The equations of equilibrium of the raft can be expressed as
Translation along x-direction:
Rotation about y-axis:
Translation along y-direction:
Rotation about x-axis:
Rotation about z-axis:
where \({\ddot{q}}_{i}^{t}\) = total acceleration at the ith floor, \({m}_{0}\) = raft mass, \({I}_{xi}, {I}_{yi}, and {I}_{zi}\) = mass moment of inertia of the raft (i = 0) and of floors (i = 1 to N) about x, y and z axis respectively. \({x}_{ci} and {y}_{ci}\) are the coordinates of center of mass at the ith floor, \({V}_{fx} and {V}_{fy}\) = reactive forces in horizontal x and y directions respectively and \({M}_{fx}, {M}_{fy} and {M}_{fz}\) = reactive moments about the x-axis, y-axis and z-axis respectively from the soil medium.
On substitution of {\(\ddot{q}_{i}^{t}\)} from Eq. (9), Eq. (11) becomes
where \(\left\{{P}_{f}\right\}=\{\begin{array}{ccc}{V}_{fx}& {V}_{fy}& {M}_{fy} \begin{array}{cc}{M}_{fx}& {M}_{fz}\end{array}\end{array}{\}}^{T}\) is a vector of reactive forces from the soil medium and \(\left[{K}_{0}^{\mathrm{^{\prime}}}\right]\) and \(\left[{K}_{1}^{\mathrm{^{\prime}}}\right]\) involve the terms \(\sum_{i=0}^{N}{m}_{i}\), \(\sum_{i=1}^{N}{m}_{i} {h}_{i}\), \(\sum_{i=1}^{N}(-{m}_{i} {y}_{ci})\), \(\sum_{i=0}^{N}{I}_{yi}+ \sum_{i=1}^{N}{m}_{i} {h}_{i}^{2} \), \(\sum_{i=1}^{N}(-{m}_{i} {y}_{ci}){h}_{i}\), \(\sum_{i=1}^{N}{m}_{i} {x}_{ci}\), \(\sum_{i=1}^{N}{m}_{i} {x}_{ci}{h}_{i}\), \(\sum_{i=0}^{N}{I}_{zi}+ \sum_{i=1}^{N}{m}_{i} ({y}_{ci}^{2}+ {x}_{ci}^{2})\) and \(\sum_{i=0}^{N}{I}_{xi}+ \sum_{i=1}^{N}{m}_{i} {h}_{i}^{2}\). Details of these matrices are reported in Bhat (2004) and Appendix A.
In order to incorporate the compliance effect, use of frequency-dependent impedance functions is made. Frequency domain analysis, therefore, has been carried out first and response quantities then are transformed into the time domain using the Inverse Fast Fourier Transform IFFT technique.
3.3 Equations of motion in frequency domain
Equation (10) for the superstructure and Eq. (12) for the raft are converted into frequency domain by letting \(\left\{{\ddot{q}}_{g}\left(t\right)\right\}=\left\{{\overline{\ddot{q}} }_{g}\left(\omega \right)\right\}{e}^{i\omega t}\) and any response quantity as \(\overline{x }=x\left(\omega \right){e}^{i\omega t}\) in which \(\overline{x }(\omega )\) is the response quantity in frequency domain. The equations of motion in frequency domain are
When any of the quantities of \(\left\{{\overline{\ddot{q}} }_{g}\right\}=1\) and the other terms are equal to zero, the response quantity \(\left\{\overline{x}\right\}\) is termed as the transfer function of the quantity.
The vector \(\left\{{\overline{P} }_{f}\right\}\) can be obtained from \(\left\{{\overline{P} }_{f}\right\}=\left[{K}_{0}^{"}\right]\{{q}_{0}\}\), where \(\left[{K}_{0}^{"}\right]\) = the matrix of impedance functions.
In the present study frequency dependent impedance functions for rectangular footings resting on elastic half-space given by Wong and Luco [31] have been used.
3.4 Equations of motions in generalized co-ordinates
Let \(\left\{\Phi \right\}\) be the normalized eigenvector of the superstructure fixed at base and the orthogonality conditions: \(\{\Phi {\}}^{T}\left[M\right]\left\{\Phi \right\}=1, \{\Phi {\}}^{T}\left[C\right]\left\{\Phi \right\}=2{\xi }_{n}{\omega }_{n}\) and \(\{\Phi {\}}^{T}\left[K\right]\left\{\Phi \right\}={\omega }_{n}^{2}\) where, \({\omega }_{n}\)= a natural frequency of the fixed base structure and \({\xi }_{n}\)= damping ratio in the nth mode of vibration.
Let \(\left\{q\left(t\right)\right\}= \sum_{n=1}^{j}{\Phi }_{n}{y}_{n}\), in which, \({y}_{n}\) = generalized co-ordinate in the nth mode and j = the number of mode shapes to be considered.
In the frequency domain this relation can be expressed as
On substitution of \(\overline{q }\left(\omega \right)\) in Eq. (13) (for the superstructure) and making use of orthogonality conditions of mode shapes the Eq. (13) becomes
where \({\Upsilon }_{n}= -{\omega }^{2}+2i{\xi }_{n}\omega {\omega }_{n}+ {\omega }_{n}^{2}\)
Similarly, using equations of motion for the foundation Eq. (14) and on substituting \(\left\{\overline{q }\left(\omega \right)\right\}\) from Eq. (15), Eq. (17) become
in which \(\left[{E}_{n}\right]=[A{]}^{T}[M]\{{\phi }_{n}\)}, and \(\left[{K}_{0}^{\mathrm{^{\prime}}\mathrm{^{\prime}}}\right]\) = the matrix of impedance functions and \(\left[{D}_{n}\right]=[B{]}^{T}[M]\{{\phi }_{n}\)},
The quantity \(\left\{{\overline{q} }_{0}(\omega )\right\}\) can be obtained from Eq. 18 for each value of \(\omega \). \({\overline{y} }_{n}\left(\omega \right)\) is then obtained from Eq. (16) and \(\overline{q }(\omega )\) from Eq. (15).
4 Numerical study
Various parameters influencing the response of symmetric multistorey buildings on compliant foundations due to torsional ground motion have been considered. These are: shear wave velocity Vs and angle of incidence θ, frequency ratio Ω = ωθ/ωt (Ω = ratio of uncoupled fundamental torsional frequency, ωθ to uncoupled fundamental translational frequency, ωt) and uncoupled fundamental period of the building T in the direction of applied ground motion. O’Rourke et al [27] reported sites for which Vs is as low as 510 ft/s (155 m/s) and 590 ft/s (180 m/s) with the corresponding values of ϕ = 19.47° and 13.93° (i.e. θ = 17.20° and 12.21°) respectively. These values are based on the recorded earthquakes and shear wave velocity of the medium Vs obtained from the seventeen sites of the San Fernando Earthquake 1971. Higher angles of incidence are produced at hard soils with larger epicentral distances or shallow earthquakes [21]. In the present study shear wave velocity has been taken equal to 350 m/s, 250 m/s and 100m/s for the soils designated as firm soil, medium-firm soils and soft soil respectively. The values of θ adopted in the present study are θ = 5°, 10° and 20°. As higher angles of incidence have been reported for firm soils only therefore θ = 20° has not been considered for soft soils cases. Similarly, the effect of lower values of θ, θ = 5° for firm and medium-firm soil is very small [32], therefore θ = 10° and 20° has only been considered in this study for these soils.
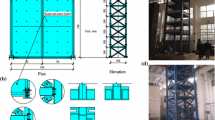
The methodology adopted in this study is presented in a flow chart as shown in figure 4. A symmetrical building plan comprising of frames as stiffening elements, shown in figure 5 is chosen for numerical study. Corresponding to this example building plan (EB) a set of six buildings are identified: EB[(T); (Ω)], in which T and Ω are the uncoupled fundamental period and frequency ratio of a building respectively. The buildings are supported on the raft with an aspect ratio L/B=2.63 (where L and B are the half lengths and breadths of the raft). The properties of the stiffening elements are assumed to be uniform along the height and the mass of each floor is assumed to be the same except at the top floor where it is assumed to be the 50% of the floor mass at other floors.

Flow chart showing methodology adopted in the study.

Example building plan (EB).
Framed buildings comprising of frames only as stiffening elements are considered in the present study. Floor slabs of these buildings are assumed to have infinite in-plane rigidity and no bending stiffness. Mass of each storey is lumped at the corresponding floor level. The properties of the structural elements are chosen to achieve the specific values of Ω and T. The frequency ratio Ω is chosen to be 0.65, 1.00 and 1.5 and the period of vibration T is chosen to be 0.3 s and 0.8 s. The chosen values of Ω cover practically the entire spectrum of torsionally flexible and torsionally stiff buildings. Similarly chosen values of T cover the low-rise frame buildings say up to 10 storeys. The values of T = 0.3 s and 0.8 s have been achieved by considering 3 and 10-storeyed buildings. The values of Ω are arrived at by an iterative process without changing the fundamental period T of the building in the direction of applied ground motion. For four buildings (Example Building plans) EB[(0.3, 0.8); (1.0, 1.5)] corresponding to T= 0.3 s and 0.8 s with Ω = 1.0 and 1.5. For example, EB[(0.3); (1.0)], and EB[(0.3); (1.5)] represent the example buildings having period of vibration of 0.3s and frequency ratios Ω = 1.0 and 1.5 respectively. The specified values of pairs of Ω = (1.0, 1.5) and T = (0.3, 0.8) are arrived at by changing the properties of columns in an iterative manner. Similarly, for the remaining two buildings EB[(0.3, 0.8); (0.65)], the specified values of pairs of Ω = 0.65 and T = (0.3, 0.8) are arrived at by changing the properties of the columns and also by changing the polar mass moment of inertia of floors.
In order to incorporate SSI effects, frequency-dependent impedance functions for rectangular footings resting on elastic half-space have been obtained from the charts and tables of [33]. These impedance functions have been modified to incorporate the soil hysteretic damping (β) by adding material dashpot constant (2Kβ/ω, K is dynamic stiffness of footing) to the radiation damping constant C [34]. The value of soil hysteretic damping has been taken as 7.5%. The impedance functions for the aspect ratio L/B=2.63 have been interpolated from L/B = 2.0 and L/B = 3.0 for different soil conditions (firm soil, medium-firm soil and soft soil).
Ten translational ground motion histories and corresponding ten torsional ground motion histories have been generated based on the equations presented in section 2. The analysis has been carried out using softwares prepared at IIT Delhi.
In the present study, translational ground motion histories are generated with pga = 0.1g, earthquake duration = 20.48 s and time interval = 0.02 s. The translational ground motion histories have been generated by assigning phase angle Φj random values in Eq. (6). Corresponding to these translational ground motion histories, torsional ground motion histories for each shear wave velocity Vs (Vs = 250 m/s, 350 m/s and 100m/s) and angle of incidence θ (θ = 5°, 10° and 20°) are further generated. A typical set of ground motion histories is shown in figure 6. The translational ground motion is assumed to act in y-direction only.

Ground motion time histories for firm soil case: (a) translational ground motion, (b) torsional ground motion, θ = 20° and (c) torsional ground motion, θ = 10°.
5 Results and discussions
Analysis has been carried out for all the buildings reported in the previous section subjected to translational ground motion and simultaneously acting translational and torsional ground motions. Storey shear time histories \(V(t)\) produced due to translational ground motion and simultaneously acting translational and torsional ground motion are obtained. Typical plots of base shear time histories \({V}_{t,f}(t)\), \({V}_{r,f}(t)\) and \({V}_{c,f}(t)\) for the extreme stiffening element (stiffening element at the extreme edge) of one of the buildings EB[(0.3); (1.0)] with the fixed base foundation on firm soil are shown in figure 7, (the subscripts t, r and c for \(V(t)\) or any other quantity stand for translational ground motion, torsional ground motion and combined translational and torsional ground motions respectively and subscript f stands for fixes base foundation). Similarly, base shear time histories \({V}_{t,i}(t)\), \({V}_{r,i}(t)\) and \({V}_{c,i}(t)\) (subscript i refers to the soil-structure interaction (SSI) effects) for the stiffening element at the extreme edge of the same building and on the same soil incorporating SSI effects are shown in figure 8. These base shear time histories are due to a sample ground motion on firm soil and θ = 20°. From these figures, it may be noted that the peak base shears due to translational and torsional ground motions do not occur at the same time instants. In the present case, the peak shear due to simultaneously acting translational and torsional ground motion occurs at a time instant when peak shear due to translational ground motion occurs. The absolute peak storey shears \(\left|{V}_{t,f}\right|,\) \(\left|{V}_{c,f}\right|\), \(\left|{V}_{t,i}\right|\) and \(\left|{V}_{c,i}\right|\), are of design interest and are obtained from such plots of \(V(t)\). These absolute values of shears have been evaluated for ten ground motion histories and average values of these shears are used in the present study. The results for the extreme stiffening element for which the effect of torsional ground motion would be the maximum are presented.

Base shear time history for the stiffening element at the extreme edge of EB[(0.3); (1.0)] on firm soil due to: (a) translation, (b) torsion and (c) translation and torsion (θ = 20°, fixed foundation).

Base shear time history for the stiffening element at the extreme edge of EB[(0.3); (1.0)] on firm soil due to: (a) translation (b) torsion and (c) translation and torsion (θ = 20°, compliant foundation).
In the present study, the ratio \(\frac{\left|{V}_{t,i}\right|}{\left|{V}_{t,f}\right|}={R}_{ti,tf}\) indicates the compliance effects on the storey shears when subjected to translation ground motion only, the ratio \(\frac{\left|{V}_{c,f}\right|}{\left|{V}_{t,f}\right|}= {R}_{cf,tf}\) indicates the effect of torsional ground motion and the ratio \(\frac{\left|{V}_{c,i}\right|}{\left|{V}_{t,f}\right|}= {R}_{ci,tf}\) indicates the effect of both SSI and torsional ground motion. These ratios are of design interest. A value of these ratios (Rti, tf, Rcf, tf and Rci, tf) greater than one indicates an increase in storey shears and a value lesser than one indicates a decrease in storey shears.
The effect of soil-structure interaction on base shear due to translational ground motion, Rti, tf for extreme stiffening element is shown in table 1. It is observed that the SSI effects are generally small for the buildings considered i.e., in the period range of 0.3s to 0.8s. For low period buildings, EB[(0.3); (0.65, 1.0, 1.5)] on soft soil the ratio Rti, tf in storey 1 (base shear) is 0.90 i.e. 10% reduction in base shear. However, for high period buildings, EB[(0.8); (0.65, 1.0, 1.5)] on medium-firm soil, there is an increase in base shear up to 6% owing to particular characteristics of the transfer function of base shear for this building and psdf of ground motion [32].
Now consider the effect of torsional ground motion on base shear, Rcf, tf, for extreme stiffening element (table 2). From this table, it is observed that for torsionally stiff buildings with T =0.3s, EB[(0.3); (1.5)] the effect of torsional ground motion is small and for buildings with T =0.8s, EB[(0.8); (1.5)] this effect is negligible, for all soil types with all θ. For torsionally flexible buildings with T=0.3s, EB[(0.3); (0.65)], the increase in base shear due to torsional ground motion for the extreme stiffening element is about 18% (Rcf, tf =1.18) for medium-firm soil with θ =20°, and about 36% (Rcf, tf =1.36) for soft soil with θ =10°. However, for these buildings with T =0.8s, EB[(0.8); (0.65)], this increase is about 8% for medium-firm soils and about 10% for soft soil with θ =10°. Similarly for torsionally medium stiff buildings with T =0.3s, EB[(0.3); (1.0)], the increase in base shear is up to 15% for medium-firm soil with θ = 20°. For these buildings with T =0.8s, this increase in base shear is small (Rcf, tf =1.05) for all buildings for all soil cases with all θ.
Similarly, now consider the effect of torsional ground motion with SSI on base shear, Rci, tf (table 3). Two mutually opposing phenomena may be identified: (i) due to the SSI effect the base shear is generally reduced as observed in Rti, tf, (table 1), and (ii) due to the incorporation of torsional ground motion there is an increase in these shears as observed in Rcf, tf, (table 2). For torsionally stiff buildings, EB[(0.3), (0.8); (1.5)] net effect of both torsional ground motion and soil-structure interaction is negligible for all soil types with all θ. However, for torsionally flexible buildings with T =0.3s, EB[(0.3); (0.65)], increase in base shear for the extreme stiffening element is about 22% (Rci, tf =1.22) as compared to Rcf, tf =1.18 (18%) for medium-firm soil with θ =20°. This value is about 34% (Rci, tf =1.34) as compared to Rcf, tf =1.36 (36%) for soft soil with θ =10°. However, for these buildings with T =0.8s, EB[(0.8); (0.65)], the increase in base shear is 14% as compared to Rcf, tf =1.08 (8%) for medium-firm soil with θ =20° and about 6% (Rci, tf =1.06) as compared to Rcf, tf =1.10 (10%) for soft soil with θ =10° (tables 2 and 3). For torsionally medium stiff buildings with T =0.3s, EB[(0.3); (1.0)], the increase in base shear is up to 14% (Rci, tf =1.14) as compared to Rcf, tf =1.15 (15%) for medium-firm soil with θ = 20° and for these medium range torsionally stiff buildings with T =0.8s, EB[(0.8); (1.0)] the increase in base shear is about 10% (Rci, tf =1.10) as compared to Rcf, tf =1.05 (5%), (tables 2 and 3).
The reason for increase in the base shears of these buildings is dependent on the characteristics of the fundamental frequency of the buildings and the spectral power of the earthquake corresponding to that frequency, as fundamental frequency of the building is mainly responsible for the overall response. Tables 4 and 5 show the fundamental frequencies of the spectrum buildings considered. From these tables it is seen that for buildings EB[(0.3); (0.65, 1.0, 1.5)], and EB[(0.8); (0.65, 1.0, 1.5)] the torsional frequencies (ωθ) are in the range of 12-30 rad/s and 5-11 rad/s respectively. Corresponding to these frequencies the maximum spectral power of torsional ground motion (psdf of torsional ground motion) is for soft soil (figure 1b) followed by medium-firm soil and firm soil. The maximum spectral power of ground motion in soft soil corresponding to the fundamental torsional frequencies of the buildings is responsible for higher response. However, for EB[(0.8)], the response due to translational ground motion (figure 1a) is high corresponding to ωt = 4-8 rad/s, for soft soil case which leads to a lower relative response due to torsional ground motion as compared to EB[(0.3)] buildings.
From the above results, it is observed that the effect of torsional ground motion on base shear is significant for torsionally flexible buildings with low period (T =0.3s) for medium-firm soil and soft soil with high values of θ. Further, it is observed that the SSI effect on base shear is small for all the buildings for all soil cases and all θ.
Now consider the variation of ratios (Rti, tf, Rcf, tf and Rci, tf) along the height. The variation of these ratios Rti, tf, Rcf, tf and Rci, tf along the height with storey number for the extreme stiffening element for all the buildings are shown in figures 9, 10, 11, 12, 13, 14, 15, 16, 17, 18, 19, 20, 21 and 22. The quantities of absolute shear are constant in a storey; therefore, these ratios are also constant in a storey. A parameter, σ similar to standard deviation is identified, \(\sigma =\sqrt{\frac{\sum_{j=1}^{N}{\left( {R}_{j}- {R}_{b}\right)}^{2}}{N}}\) which is a measure of the deviation of storey shears along the height from the base shear, where R indicates the values of ratios Rti, tf, Rcf, tf and Rci, tf identified above and the subscript j and b indicate jth storey and ground storey respectively. The deviation, σ of Rti, tf, Rcf, tf and Rci, tf are shown in tables: 6, 7 and 8. In general, variations in the ranges: 0 < σ < 0.025; 0.025< σ < 0.05 and σ > 0.05 are taken to be very small, small and significant respectively.

Variation of Rti, tf along height for extreme stiffening element of EB[(0.3); (0.65, 1.0, 1.5)] on: firm soil, medium-firm soil and soft soil.

Variation of Rti, tf along height for extreme stiffening element of EB[(0.8); (0.65, 1.0, 1.5)] on: firm soil, medium-firm soil and soft soil.

Variation of Rcf, tf with different soil types for θ = 20° for the stiffening element at the extreme edge of EB[(0.3)].

Variation of Rcf, tf with different soil types for θ = 10° for the stiffening element at the extreme edge of EB[(0.3)].

Variation of Rcf, tf with Ω for soft soil and θ = 5° for the stiffening element at the extreme edge of EB[(0.3)].

Variation of Rcf, tf with different soil types for θ = 20° for the stiffening element at the extreme edge of EB[(0.8)].

Variation of Rcf, tf with different soil types for θ = 10° for the stiffening element at the extreme edge of EB[(0.8)].

Variation of Rcf, tf with Ω for soft soil and θ = 5° for the stiffening element at the extreme edge of EB[(0.3)].

Variation of Rci, tf with different soil types for θ =20°, for the stiffening element at the extreme edge of EB[(0.3)].

Variation of Rci, tf with different soil types for θ =10°, for the stiffening element at the extreme edge of EB[(0.3)].

Variation of Rci, tf with Ω for soft soil and θ = 5° for the stiffening element at the extreme edge of EB[(0.3)].

Variation of Rci, tf with different soil types for θ =20°, for the stiffening element at the extreme edge of EB[(0.8)].

Variation of Rci, tf with different soil types for θ =10°, for the stiffening element at the extreme edge of EB[(0.8)].

Variation of Rci, tf with Ω for soft soil and θ = 5° for the stiffening element at the extreme edge of EB[(0.8)].
The variation of Rti, tf along the height for extreme stiffening element of all the buildings EB[(0.3, 0.8); (0.65, 1.0, 1.5)] for all soil cases, is small or very small except for the buildings EB[(0.8); (0.65, 1.0, 1.5)] where the variation is significant for the soft soil case (figures 9 and 10 and table 6). Rti, tf varies from 0.93 at the base to 1.11 at the top (i.e., storey shear is reduced by 7% in the bottommost storey; however, there is an increase of 11% in the top storey when SSI is also incorporated).
Similarly, the variation of Rcf, tf along the height for extreme stiffening element of all the buildings EB[(0.3, 0.8); (0.65, 1.0, 1.5)] for all soil cases is also small or very small except for the building EB[(0.8); (0.65)] for the medium-firm soil case with θ = 20° where the variation is significant (figures 11, 12, 13, 14, 15, 16 and table 7). Rcf, tf varies from 1.09 at the base to 1.20 at top (i.e., storey shear is increased by 9% in the bottommost storey and by 20% in the top storey when torsional ground motion is also considered).
From the above results, it is observed that the effect of SSI (translation case only) and torsional ground motion (without SSI) on storey shear along the height generally nearly remains the same, however, in some cases, the effect on storey shears vary significantly.
The variation of Rci, tf (i.e. when the combined effect of torsional ground motion and SSI is considered) along the height for extreme stiffening element is small for buildings with T = 0.3s, EB[(0.3); (0.65), (1.0), (1.5)] for all soil cases with all θ, except for building EB[(0.3); (1.5)] for firm and medium-firm soil cases, where the variation is very small (figures 17, 18, 19 and table 8). However, for buildings with T =0.8s, the variation of Rci, tf along the height for extreme stiffening element is significant for almost all buildings, EB[(0.8); (0.65), (1.0), (1.5)] for all soil cases with all θ, (figures 20, 21, 22 and table 8). Rci, tf varies from 1.08 at the base to 1.21 at the top (i.e., storey shear is increased by 8% and 21% in the bottommost storey and in the top storey, respectively) for building EB[(0.8); (0.65)] for medium-firm soil with θ = 20°. Similarly Rci, tf varies from 0.98 at the base to 1.17 at the top (i.e., storey shear is reduced by 2% in the bottommost storey, however, there is an increase of 17% in the top storey). Also, Rci, tf varies from 0.93 at the base to 1.11 at the top (i.e. storey shear is reduced by 7% in the bottommost storey, however, there is an increase of 11% in the top storey). The increase in top storey shear is 18% for EB[(0.8); (1.0)] and EB[(0.8); (1.5)], respectively, for soft soil with θ =10°.
Thus, from the results in the above paragraph, it is observed that the combined effect of torsional ground motion and SSI on the distribution of storey shears along the height nearly remains the same for buildings with low period (T=0.3s) but varies significantly for high period buildings (T =0.8s). This variation in the distribution of storey shears along the height in the case of EB[(0.8)] buildings is attributed to the contribution of higher modes in the response quantity.
6 Conclusions
From the results obtained by analyzing three types of buildings (torsionally flexible, torsionally medium stiff and torsionally stiff) of periods of vibration 0.3 s and 0.8 s (low period and high period) on three types of soil medium (firm, medium firm and soft), the following conclusions are drawn.
-
a.
Effect of torsional ground motion on storey shears is significant in the case of torsionally flexible buildings with low periods of vibration on soft soils and medium-firm soil. The increase in base shear for the extreme stiffening element for buildings considered is up to 35% and about 20% for low period buildings on soft soil and medium-firm soil, respectively. The provision for incorporation of torsional ground motion in seismic codes in the form of accidental eccentricity needs to be looked into for such types of buildings.
-
b.
The distribution of storey shears along the height varies significantly for high period buildings (T =0.8 s), when torsional ground motion and SSI effects are considered.
-
c.
Effect of SSI including torsional ground motion on base shear is small for all the buildings for all soil types. Similar effect is generally observed in the case of translational ground motion also.
References
Kozák J T 2009 Tutorial on earthquake rotational effects: Historical examples. Bull. Seismol. Soc. Am. 99: 998–1010
Zerva A, Falamarz-Sheikhabadi M R and Poul M K 2018 Issues with the use of spatially variable seismic ground motions in engineering applications. Geotech. Geol. Earthq. Eng. 46: 225–252
Hao H 1997 Torsional response of building structures to spatial random ground excitations. Eng. Struct. 19: 105–112
Hao H 1998 Response of two-way eccentric building to nonuniform base excitations. Eng. Struct. 20: 677–684
Hao H and Duan X N 1995 Seismic response of asymmetric structures to multiple ground motions. J. Struct. Eng. 121: 1557–1564
Hao H and Duan X 1996 Multiple excitation effects on response of symmetric buildings. Eng. Struct. 18: 732–740
De La Llera J C and Chopra A K 1994 Accidental and natural torsion in earthquake response and design of buildings. UCB/EERC-94/07
De la Llera J C and Chopra A K 1994 Accidental torsion in buildings due to base rotational excitation. Earthq. Eng. Struct. Dyn. 23: 1003–1021
Hao H 1996 Characteristics of torsional ground motions. Earthq. Eng. Struct. Dyn. 25: 599–610
Rambabu K V and Allam M M 2007 Response of an open-plane frame to multiple support horizontal seismic excitations with soil-structure interaction. J. Sound Vib. 299: 388–396
Gupta I D and Trifunac M D 2008 A note on contribution of torsional excitation to earthquake response of simple symmetric buildings. Earthq. Eng. Eng. Vib. 7: 27–46
Gupta V K and Trifunac M D 1990 Response of multistoried buildings to ground translation and rocking during earthquakes. Probabilistic Eng. Mech. 5: 138–145
Gupta V K and Trifunac M D 1990 A note on contributions of ground torsion to seismic response of symmetric multistoried buildings. Earthq. Eng. Eng. Vib. 10: 27–40
Basu D, Whittaker A S and Constantinou M C 2012 Characterizing the rotational components of earthquake ground motion
Loghman V, Tajammolian H and Khoshnoudian F 2017 Effects of rotational components of earthquakes on seismic responses of triple concave friction pendulum base-isolated structures. JVC/Journal Vib. Control 23: 1495–1517
Basu D, Whittaker A S and Constantinou M C 2013 Extracting rotational components of earthquake ground motion using data recorded at multiple stations. Earthq. Eng. Struct. Dyn. 42: 451–468
Guidotti R, Castellani A and Stupazzini M 2018 Near-field earthquake strong ground motion rotations and their relevance on tall buildings. Bull. Seismol. Soc. Am. 108: 1171–1184
Poudel B, Özşahin E and Pekcan G 2022 Effect of Torsional Ground Motions on Floor Acceleration Response in Flexible SMRF Buildings. J. Earthq. Eng. 26: 2168–2185
Anagnostopoulos S A, Kyrkos M T and Stathopoulos K G 2015 Earthquake induced torsion in buildings: Critical review and state of the art. Earthq. Struct. 8: 305–377
Bhat J A, Ramana G V, Nagpal A K and Kamatchi P 2022 Effect of torsional ground motion on the seismic response of multistorey buildings on different soil mediums. J. Struct. Eng. 48: 467–484
Castellani A and Boffi G 1986 Rotational components of the surface ground motion during an earthquake. Earthq. Eng. Struct. Dyn. 14: 751–767
Schreiber K U, Velikoseltsev A, Carr A J and Franco-Anaya R 2009 The application of fiber optic gyroscopes for the measurement of rotations in structural engineering. Bull. Seismol. Soc. Am. 99: 1207–1214
Lee V W and Trifunac M D 1985 Torsional accelerograms. Int. J. Soil Dyn. Earthq. Eng. 4: 132–139
Oliveira C S and Bolt B A 1989 Rotational components of surface strong ground motion. Earthq. Eng. Struct. Dyn. 18: 517–526
Laouami N and Labbe P 2002 Experimental analysis of seismic torsional ground motion recorded by the LSST-Lotung array. Earthq. Eng. Struct. Dyn. 31: 2141–2148
Ghayamghamian M R and Nouri G R 2007 On the characteristics of ground motion rotational components using Chiba dense array data. Earthq. Eng. Struct. Dyn. 36: 1407–1429
O’Rourke M J, Bloom M C and Dobry R 1982 Apparent propagation velocity of body waves. Earthq. Eng. Struct. Dyn. 10: 283–294
Datta T K and Mashaly E A 1986 Pipeline response to random ground motion by discrete model. Earthq. Eng. Struct. Dyn. 14: 559–572
Lin J S 1987 Ground motion input through equivalent stationary motion. Dev. Geotech. Eng. 44: 537–549
Trifunac M D 1982 Rotational components of strong motion for incident body waves. Int. J. Soil Dyn. Earthq. Eng. 1: 11–19
Wong H L and Luco J E 1978 Tables of impedance functions and input motions for rectangular foundations. Rep. - Univ. South. California, Dep. Civ. Eng.
Bhat J 2004 Effect of Torsional Ground Motion on the Seismic Response of Multistorey Buildings on Compliant Foundations. Doctoral Dissertation, IIT Delhi, New Delhi (Indian Institute of Technology Delhi)
Wong H L and Luco J E 1976 Dynamic response of rigid foundations of arbitrary shape. Earthq. Eng. Struct. Dyn. 4: 579–587
Gazetas G 1991 Formulas and charts for impedances of surface and embedded foundations. J. Geotech. Eng. 117: 1363–1381
Author information
Authors and Affiliations
Corresponding author
Appendix A
Appendix A
1.1 Equation of motion for the raft
The equations of equilibrium of the raft are provided in equations 11(a) to 11(e). On substitution of \(\ddot{q}_{i}^{t}\) from Eq. 8, Eqs. 11(a) to 11(e) become:
Translation along x-direction:
Rotation about y-axis:
Translation along y-direction:
Rotation about x-axis:
Rotation about z-axis:
Equations (A1 a) to (A1 e) can be expressed in a simplified form by the substitution of following terms:
and can be expressed as:
Equations (A3a) to (A3e) may now be written in the matrix form as:
in which \(\left[{K}_{0}^{\mathrm{^{\prime}}}\right]= \left[\begin{array}{c}a\\ 0\\ b\\ 0\\ {d}_{y}\end{array} \begin{array}{c}0\\ a\\ 0\\ b\\ {d}_{x}\end{array} \begin{array}{c}b\\ 0\\ {c}_{y}\\ 0\\ {e}_{y}\end{array} \begin{array}{c}0\\ b\\ 0\\ {c}_{y}\\ {e}_{x}\end{array} \begin{array}{c}{d}_{y}\\ {d}_{x}\\ {e}_{y}\\ {e}_{x}\\ f\end{array}\right]\)where \(\left[{K}_{0}^{^{\prime}}\right]\) is a matrix, which when multiplied by \(\left\{{\ddot{q}}_{g}\right\}\) gives the inertia forces produced by all masses of the structure and \(\left\{{P}_{f}\right\}\) is a vector of reactive forces from the soil and can be expressed as:
where the non-zero terms \({K}_{0}^{"}\left(i,j\right)\) are impedance functions in complex form defined as:
The values of \({k}_{x}, {k}_{y}, {k}_{rx},\) \({k}_{ry}\), and \({k}_{rz}\) have been obtained from curves given by Wang and Luco [31].
Rights and permissions
About this article

Cite this article
Bhat, J.A., Ramana, G.V. & Nagpal, A.K. Effect of torsional ground motion on seismic response of symmetric multistorey buildings incorporating soil–structure interaction. Sādhanā 47, 200 (2022). https://doi.org/10.1007/s12046-022-01948-6
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s12046-022-01948-6