
Abstract
Monolithic mechanism is a potential mechanism for used in precision machining applications. However, it exhibits the limited problems of the resonant frequency and the capacity of load. This paper proposes a design optimization for a new monolithic mechanism. This mechanism is built in a symmetric configuration to generate a translation movement along the vertical axis. Basically, there is a complex relationship among the performances of the mechanism and its geometrical factors. Firstly, a mechanical model of the proposed MM was built, and the numerical data are collected through the finite element simulations. Next, the intelligent surrogate model based on the adaptive-network-based fuzzy inference system with three Genfis types is built to form the fitness function for both the resonant frequency and the force. The modeling results indicated that the Genfis2 and Genfis3 are the best modeler for the resonant frequency and the force, respectively. Lastly, the bonobo optimizer is utilized to maximize the resonant frequency and the force. For case study 1, the results found that the optimal frequency is found about 1013 Hz. For case study 2, the optimal force is found approximately 202.0154 N. Lastly, the errors between the predicted and verified values for two case studies are lower than 4%. The proposed method is a potential optimizer for other monolithic mechanisms and related engineering designs.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
For polishing robots and computer numerically controlled machine (CNC), the workspace of commercialized robots and CNC machines are usually limited. For instance, CNC machine was applied for bone grinding where it requires a high accuracy with a smooth movement of end-effector [1,2,3]. However, such these machines need extra actuators and sensors to be integrated with accurate controller during operation process. In addition, the kinematic joints are often used to combine different rigid counterparts, which possess undesirable gaps and clearances. Therefore, they exhibit the disadvantages of vibrations and positioning errors. In order to overcome such limitations, monolithic mechanism is an extremely important alternative to obtain a smooth motion with a high precision in precision machining and manufacturing. In the past decades, the monolithic mechanism has been increasingly common in precision industry so as to reduce the counterparts and increase the accurate positioning. Compared with the rigid-kinematic mechanisms, the monolithic mechanism exhibits of less assemble, simple manufacturing (e.g., 3D printer, electrical discharge machining, wire electrical discharged machining), free lubricant and friction [4,5,6,7,8]. Such these advantages of monolithic mechanism allow it to become more flexible and economic than conventional counterparts.
Nowadays, the monolithic mechanisms have been designed via using the concept of compliant mechanism or flexure-based mechanism. The monolithic mechanisms have widely achieved in many engineering applications. For example, a tip-tilt-piston stage was designed via the concept of monolithic mechanism. In this study, the stiffness of the stage was analyzed using compliance matrix [9]. The stage was monolithically manufactured through CNC milling process. The rotation and displacement were experimentally tested. Another monolithic mechanism was proposed for used in microelectronic-device packaging [10]. This mechanism used two stroke amplifiers of bridge and parallelogram mechanisms. In this paper, they conducted the static and dynamic behaviors of the mechanism via the pseudo-rigid-body model and Lagrange procedure. The prototype was fabricated using the wire electro discharge machining and the experiments were investigated to compare with the predicted values. A monolithic parallel micromanipulator was proposed for nanopositioning application [11]. Kinematic modeling of the micromanipulator was investigated and the Acrylonitrile Butadiene Styrene prototype was fabricated via 3D printing. This mechanism could give a large stroke and high frequency bandwidth. A monolithic constant-force mechanism was designed for force device [12]. They analyzed performances of the mechanism using pseudo-rigid-body model. In this article, the output force was optimized via genetic algorithm. A design method for monolithic spatial mechanism was suggested to provide a translational motion [13]. The configurations of mechanisms were discussed. A three degrees of freedom monolithic mechanism was analyzed via analytical method and the results were verified by finite element analysis and experiments [14]. A monolithic stage embedded with displacement sensor was designed for positioning application [15]. A prismatic-spherical-spherical parallel mechanism was monolithically designed to achieve a large stroke and high accuracy [16]. It was employed for adjusting the optical elements. More recent years, a 3-DOF rotation micromanipulator was designed [17]. The rotation angle of this micromanipulator could achieve up to 10.28 mrad. Then, a constant-force module was proposed via using z-shape and bistable structure [18]. The output constant force was found about 8.5 N. In 20,121, a spatial constant force end-effector was designed for the polishing process [19]. The mathematical models were formed by pseudo-rigid-body model, and then the particle swarm optimizer was applied to search the optimum structure. Besides, a 2-DOF nanomanipulator was designed and analyzed for positioning stage [20]. A XYZ positioner was developed, and the statics was modeled using compliance matrix [21].
In the few recent decades, there have been many efforts on developing the modeling methods for monolithic mechanisms. A monolithic tuning mechanism was designed, and then it was modeled via the Euler–Bernoulli beam theory [22]. Its geometries were optimized through COMSOL software. An optimization strategy for a monolithic hexapod was studied to achieve a large stroke of 100 mm [23]. A monolithic mechanism with three degrees of freedom was designed for micropositioning [24]. The stiffness was analyzed and the whole mechanism was analyzed via using finite element method in ANSYS software. A monolithic hinge was analyzed via using the empirical method coupled with finite element analysis [25]. A few enhanced theoretical models were built though the Euler–Bernoulli theory for monolithic displacement amplifiers [26]. A compliance matrix method was applied to analyze a some monolithic mechanisms [27]. Pseudo-rigid-body model was employed for modeling the three degrees of freedom monolithic positioner [28]. However, the pseudo-rigid-body model is difficult to analyze for complex mechanisms with many flexure joints and rigid links. A polynomial curvature method was proposed for design optimization of a XY positioner [29]. Considering the optimization problem, the structural optimization was employed to design a monolithic mechanism to achieve the good statics and dynamics [30]. A combination of finite element analysis and multi-objective genetic algorithm was applied to optimize the tilt micromanipulator [31]. A XYθ mask alignment stage was optimized using the grey relational analysis [32].
In the literature review [17,18,19,20,21,22,23,24,25,26,27,28,29,30,31,32,33], the popularly analytical methods were proposed to analyze the output performances of compliant mechanisms, e.g., Euler–Bernoulli theory, pseudo-rigid-body model, compliance matrix, and so on. Although the performances of monolithic mechanisms were analyzed via analytical methods but the complexity of methods are still limitations in desiging types of more complex shaped mechanisms, there is a lack of general technique in improving the performances of almost monolithic mechanisms in the earlier phase of design. Hence, this paper proposes a new combination of intelligent surrogate model and intelligent bonobo optimizer [34] for optimal design of a monolithic mechanism. As discussed above, there have been many different methods in designing, analyzing, and optimizing the monolithic mechanisms. Those methods are still valid but their usages are relatively complicated. In order to overcome the limitations of analytical methods, this study proposes an alternative optimizer by combining the intelligent surrogate model and intelligent bonobo optimization algorithm [34].
This main contribution of this article is to propose a new design optimization for a monolithic mechanism. This paper includes the following sections. An adaptive-network-based fuzzy inference system with three Genfis types are investigated and selected to form the fitness functions for the bonobo optimizer. The numerical data are collected, and the cost functions are built. They are then optimized by bonobo optimizer. The optimal solutions are verified through finite element analysis.
2 Proposed design and research methodology
2.1 Problem statement of monolithic mechanism
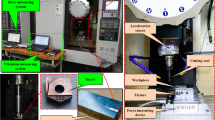
A monolithic mechanism (MM) is potentially used in precision industry. It can be a positioner which determine a few accurate locations in the range of micrometers scale. The proposed MM can be also employed as a manipulator to bring an end effector in fine machining. As illustrated in Fig. 1a, the MM consists of rigid parts and thin beams. The entire mechanism is mounted on a station by using fixed screws. When a load is exerted to the input port, the output port creates an output displacement. The input displacement is transferred to the output one through the thin beams which are called as flexure beams. There are three basic geometries of the flexure beams that contribute strongly to the entire displacement, including thickness T1, thickness T2, and thickness T3. The thickness of the whole mechanism is 12 mm, as given in Fig. 1b. The total dimension of the proposed mechanism is about 87 * 110 * 12 mm3. For current precision machining platforms for real-time applications, the MM can be used to drive the machining tool with a quasi-stable output force, such as polishing, surface machining, etc.

Monolithic mechanism: a 2D and b 3D scheme (unit: mm)
In the field of precision machining and positioning applications, the proposed MM is required to provide a fast response and a large capacity of acting force. A fast response can be achieved when the first natural frequency of the mechanism is high. Meanwhile, a large capacity of load means that the MM can subject a wide range of various loads, which can be suitable for many different positioners. Meanwhile, the high resonant frequency can avoid the vibration resonance from actuators, motors, and others.
In order to reach the better performances, the frequency and the capacity of load are optimized in this work. Two case studies are described as follows.
Case 1 Optimization of the frequency.
Find design variables: \({\mathbf{x}} = \left[ {T_{1} ,T_{2} ,T_{3} } \right]\)
S.t.
Case 2 Optimization of the load capacity
Find design variables: \({\mathbf{x}} = \left[ {T_{1} ,T_{2} ,T_{3} } \right]\)
S.t.
where f1(x) and f2(x) are the frequency and the capacity of load. The thicknesses T1, T2, and T3 are the geometrical variables of the proposed mechanism.
3 Research method
The key aim of this study is to focus on the optimal development for the mentioned-above monolithic mechanism. As discussed above, because of limitations of analytical methods, the intelligent surrogate model based on adaptive neuro-fuzzy inference system is a potential alternative for establishing the fitness functions for the proposed MM. Besides, the bonobo optimization algorithm (BO) is adopted to find the optimal performances for the mechanism. The BO is an optimizer based on the bonobo's social behavior and its reproductive strategy [34]. This optimizer has been applied successfully for many engineering fields but it has not extended for the proposed monolithic mechanism. Figure 2a illustrates the optimization procedure. Figure 2b describes the flowchart of the bonobo optimization algorithm. The optimization procedure is conducted as follows:
-
Initialize an initial design of the proposed MM.
-
Do finite element simulation. The Box–Behnken design (BBD) is utilized to establish the numerical experimentations.
-
Collect dataset with training and testing.
-
Establish the intelligent surrogate model based on the ANFIS with three Genfis types, i.e., Genfis1, Genfis2, and Genfis3 [35].
-
Choose the best surrogate model.
-
Formulate the fitness function for the frequency and the force.
-
Optimize the frequency and the force using BO.
-
Check the optimal solutions. If the results are satisfied, the optimization process is ended. Otherwise, it returns the design phase.

Flowchart of research method: a procedure, b bonobo optimization algorithm
The performance of the surrogate model is evaluated by the following metrics.
Mean squared error (MSE):
Root mean squared error (RMSE):
Coefficient of determination (R2):
Standard deviation (Std):
where yi is the measured value,\(\hat{y}\) is the predicted value,\(\overline{y}\) is the average value, and n is number of samples.
4 Results and discussion
4.1 Analysis of monolithic mechanism
The proposed monolithic mechanism is simulated to collect the resonant frequency and the force (F). Figure 3 describes the deformation of the proposed MM. The thin beams/hinges are meshed by BEAM188 while the rigid parts are meshed via SOLID186, as depicted in Fig. 3a. When an input displacement (Din) acts to the mechanism, the output displacement is noted as Dout. From the Fig. 3b, the deformable and undeformed configurations of the mechanism are illustrated. The steel material A-36 is used for the mechanism. It has a yield stress of 250 MPa.

Deformation simulation of monolithic mechanism: a mesh, b deformation configuration
The simulated datasets are collected, including the resonant frequency and the force, as shown in Table 1.
4.2 Formulation of intelligent surrogate model
By using the dataset from Table 1, the ANFIS-based surrogate model is established. The outcomes of ANFIS are the frequency and the force. Figure 4a shows a good agreement among the predicted frequency and simulated one. Besides, the correlation coefficients (R) for the training, testing, and all data are approximately one, as seen in Fig. 4b. Moreover, the establishment of the testing and training data are well-formulated in Fig. 4c and d, respectively. The evaluation metrics for modeling the frequency are given in Fig. 4.

Modeling of the frequency: a All data, b correlation, c test data, d train data
The nonlinear relationship among the frequency and thickness (T1, T2, and T3) are illustrated in Fig. 5a and b. The high nonlinear relationship may be restricted by using the traditionally analytical methods. This is a motivation in building the intelligent surrogate techniques in this work.

Influence of geometrical factors on the frequency: a T1 and T2, b T2 and T3
Through many simulations for modeling the frequency with three Genfis types, the results determined that the Genfis2 type is the best candidate for formulating the fitness function of the frequency. The results of evaluation indexes of this surrogate model are very well, as given in Table 2. It determined that the radius of cluster is well-found about 0.1.
Additionally, the dataset from Table 1 is employed to formulate the fitness function for the force. The ANFIS-based surrogate model with three Genfis types is established. Figure 6a depicts a good closeness between the predicted and simulated force. The result indicated that the correlation coefficients (R) for the training, testing, and all data are very well, as shown in Fig. 6b. Furthermore, the modeling of the testing and training data are well-established, as described in Fig. 6c and d, respectively. The evaluation metrics for modeling the force are given in Fig. 6.

Modeling of the force: a All data, b correlation, c test data, d train data
Figures 7a and 5b show a nonlinear relationship among the force and the thickness (T1, T2, and T3). Such a relation can be well-established via using the proposed intelligent surrogates.

Influence of geometrical factors on the force: a T1 and T2, b T2 and T3
By doing many simulations for modeling the force with three Genfis types, the results found that the Genfis3 type is the best surrogate model for formulating the fitness function of the force with good evaluation indexes, as shown in Table 3. It determined that the number of optimal clusters is 5.
4.3 Optimal results and verifications
The two case studies in Eqs. (2–3) are conducted by a couple of the Genfis2 with the BO algorithm. The basic parameters of BO are setup in MATLAB R2019b, including number of bonobos populations of 30, max iterations of 400, sharing coefficient for alpha bonobo of 1.25, sharing coefficient for selected bonobo of 1.3, rate of change in phase probability of 0.0035, and max value of temporary sub-group size factor of 0.05. The results found that the optimal thickness values for the frequency are determined as T1 = 1.58 mm, T2 = 1.1 mm, and T3 = 0.80 mm. The optimal frequency is found about 1013 Hz. Subsequently, the Genfis3 is embedded into the BO to find the optimal solution for the force. The results indicated that the optimal thickness values for the force are determined as T1 = 1.29 mm, T2 = 0.90 mm, and T3 = 0.88 mm. The optimal force is approximately 202.0154 N, as shown in Table 4. The convergence histories for the frequency and the force are described in Fig. 8a and b, respectively. It can be seen that the convergent speeds for the both the cost functions are relatively rapid.

Convergent history: a Frequency, b force
In order to confirm the robustness and accuracy of the proposed method, the thickness values (T1 = 1.58 mm, T2 = 1.1 mm, and T3 = 0.80 mm) are built for case 1 and the thickness values (T1 = 1.29 mm, T2 = 0.90 mm, and T3 = 0.88 mm) for case 2. Two prototypes are drawn, and then they are simulated by ANSYS R19.1. The verification results are given in Table 4. It showed that the errors between the predicted and verified values for two case studies are less than 4%. It can conclude that the proposed method is a robust optimization method for the monolithic mechanism.
The advantages of the presented method are that it is considered as an efficiently alternative tool in modeling the behaviors of general monolithic mechanisms and other engineering. Besides, the presented method can be effectively solved the optimization problems with the fast convergence and precise results. However, the modeling accuracy still depends on the experiences and knowledge of an analytics. There is a need to control the main parameters of the intelligent surrogate in modeling the nonlinear characteristics. For example, the membership types and values, the training technique, and others. In the limitations of this paper, the best parameters were chosen for the surrogates. The presented method can be extended to apply for engineering modeling and optimization situations with high nonlinearity.
5 Conclusions
This paper has been proposed a combination of the intelligent surrogate model and bonobo optimization algorithm for solving the optimization problem of a new monolithic mechanism. The proposed mechanism was symmetrically designed to reach the translational motion in the vertical direction. The suggested MM mechanism comprised the thin beams, so-called flexure elements, and the rigid links. The movement of the mechanism was almost based on the deformation of the flexures while the rigid links were assumed as the ideal rigid ones.
First of all, the 3D mechanical model of the proposed MM was built, and the BBD design of experiment was applied to layout the numerical experimentations. Next, the datasets were retrieved through the finite element simulations. The resonant frequency and the force of the MM were collected. And then, the ANFIS-based intelligent surrogate models were established to formulate the fitness function for both the resonant frequency and the force. Among three popular Genfis types of ANFIS system, the modeling results determined that the Genfis2 is the best modeler for the resonant frequency and the Genfis3 is the best predictor for the force. Lastly, the BO optimizer was utilized to maximize the resonant frequency and the force.
The optimization results and verifications were drawn as follows:
-
For case study 1, the optimal geometries of the proposed MM were found with T1 = 1.58 mm, T2 = 1.1 mm, and T3 = 0.80 mm. The optimal frequency is found about 1013 Hz. It means that the MM has a large bandwidth.
-
For case study 2, the optimal values of geometries of the MM were determined as T1 = 1.29 mm, T2 = 0.90 mm, and T3 = 0.88 mm. The optimal force is approximately 202.0154 N. This means that the MM has a high capacity of load.
-
The verified implementations showed that the errors between the predicted and verified values for two case studies are smaller than 4%.
-
The proposed method is a potential optimizer for other monolithic mechanisms.
In the future investigations, the real prototypes of the MM will be fabricated via wire electrical discharged machining. The static and dynamic tests will be conducted to measure the force and the resonant frequency of mechanism. The MM will be integrated into a practical positioner to demonstrate its applications. Some controllers can be built to precisely control the output force and position.
References
Babbar, A., Jain, V., Gupta, D., Agrawal, D., Prakash, C., Singh, S., et al.: Experimental analysis of wear and multi-shape burr loading during neurosurgical bone grinding. J. Mater. Res. Technol. 12, 15–28 (2021)
Khan, I.A.: Multi-response ergonomic design of human-CNC machine interface. Int. J. Interact. Des. Manuf. 8(1), 13–31 (2014)
Limón-Molina, G.M., González-Ángeles, Á., Nuño-Moreno, V., Luna-Sandoval, G.: Proposes to enable a CNC mill from 3 axes to 5 axes synchronized. Int. J. Interact. Des. Manuf. 12(1), 145–150 (2018)
Le Chau, N., Tran, N.T., Dao, T.-P.: Topology and size optimization for a flexure hinge using an integration of SIMP, deep artificial neural network, and water cycle algorithm. Appl. Soft Comput. 113, 108031 (2021). https://doi.org/10.1016/j.asoc.2021.108031
Le Chau, N., Ho, N.L., Vinh Chung, T.T., Huang, S.C., Dao, T.P.: Computing optimization of a parallel structure-based monolithic gripper for manipulation using weight method-based grey relational analysis. Int. J. Ambient Comput. Intell. 12(3), 39–74 (2021)
Chau, N.L., Ho, N.L., Tran, N.T., Dao, T.-P.: Analytical model and computing optimization of a compliant gripper for the assembly system of mini direct-current motor. Int. J. Ambient Comput. Intell. 12(1), 1–28 (2021)
Pramanik, A., Islam, M.N., Basak, A.K., Dong, Y., Littlefair, G., Prakash, C.: Optimizing dimensional accuracy of titanium alloy features produced by wire electrical discharge machining. Mater. Manuf. Process. 34(10), 1083–1090 (2019). https://doi.org/10.1080/10426914.2019.1628259
Sharma, A., Kumar, V., Babbar, A., Dhawan, V., Kotecha, K., Prakash, C.: Experimental investigation and optimization of electric discharge machining process parameters using grey-fuzzy-based hybrid techniques. Materials (Basel) 14(19), 5820 (2021)
Hao, G.: Determinate synthesis of symmetrical, monolithic tip-tilt-piston flexure stages. J. Mech. Des. Trans. ASME 139(4), 1–9 (2017)
Liang, C., Wang, F., Tian, Y., Zhao, X., Zhang, H.: A novel monolithic piezoelectric actuated flexure-mechanism based wire clamp for microelectronic device packaging, p. 045106 (2015). https://www.springer.com/engineering/electronics/j
Search H, Journals C, Contact A, Iopscience M, Address IP, Rahman AM, et al. Ce Pte Us Pt. pp. 0–68 (2017)
Yongli He RL. Authors : Ac ce d M us pt. 2D Mater., pp. 1–6 (2020). https://doi.org/10.1088/2053-1583/abe778
Hao, G., Li, H., Kavanagh, R.: Design of decoupled, compact, and monolithic spatial translational compliant parallel manipulators based on the position space. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 230(3), 367–378 (2016)
Cai, K., Tian, Y., Wang, F., Zhang, D., Shirinzadeh, B.: Development of a piezo-driven 3-DOF stage with T-shape flexible hinge mechanism. Robot. Comput. Integr. Manuf. 37, 125–138 (2016). https://doi.org/10.1016/j.rcim.2015.07.004
Lee, C.B., Lee, S.K., Tarbutton, J.A.: Positioning control effectiveness of optical knife edge displacement sensor-embedded monolithic precision stage. Sens. Actuators A Phys. 233, 390–396 (2015). https://doi.org/10.1016/j.sna.2015.07.035
Guo, K., Ni, M., Chen, H., Sui, Y.: A monolithic adjusting mechanism for optical element based on modified 6-PSS parallel mechanism. Sens. Actuators A Phys. 251, 1–9 (2016). https://doi.org/10.1016/j.sna.2016.09.035
Ding, B., Li, Y., Xiao, X., Tang, Y., Li, B.: Design and analysis of a 3-DOF planar micromanipulation stage with large rotational displacement for micromanipulation system. Mech. Sci. 8, 117–126 (2017)
Ding, B., Li, X., Li, Y.: FEA-based optimization and experimental verification of a typical flexure-based constant force module. Sens. Actuators A Phys. 332, 113083 (2021). https://doi.org/10.1016/j.sna.2021.113083
Ding, B., Zhao, J., Li, Y.: Design of a spatial constant-force end-effector for polishing/deburring operations. Int. J. Adv. Manuf. Technol. 116, 3507–3515 (2021)
Qin, Y.D., Zhao, X., Shirinzadeh, B., Tian, Y.L., Zhang, D.W.: Closed-form modeling and analysis of an XY flexure-based nano-manipulator. Chin. J. Mech. Eng. Engl. Ed. (2018). https://doi.org/10.1186/s10033-018-0211-z
Xie, Y., Li, Y., Cheung, C.F., Zhu, Z., Chen, X.: Design and analysis of a novel compact XYZ parallel precision positioning stage. Microsyst. Technol. 27(5), 1925–1932 (2021). https://doi.org/10.1007/s00542-020-04968-6
Meng, R., Zhang, W., Zhou, S., Wang, C., Zhao, J., Ge, W.: A micro monolithic integrated force-torque sensor with piezoelectric tuning mechanism. Microsyst. Technol. 26(9), 2879–2886 (2020). https://doi.org/10.1007/s00542-020-04829-2
Naves, M., Nijenhuis, M., Seinhorst, B., Hakvoort, W.B.J., Brouwer, D.M.: T-Flex: a fully flexure-based large range of motion precision hexapod. Precis. Eng. 72, 912–928 (2021). https://doi.org/10.1016/j.precisioneng.2021.08.015
Ghafarian, M., Shirinzadeh, B., Al-Jodah, A., Das, T.K., Wei, W., Tian, Y., et al.: An XYZ micromanipulator for precise positioning applications. J. Micro-Bio Robot. 16(1), 53–63 (2020)
Liu, M., Zhang, X., Fatikow, S.: Design and analysis of a multi-notched flexure hinge for compliant mechanisms. Precis. Eng. (2017). https://doi.org/10.1016/j.precisioneng.2016.12.012
Ling, M., Cao, J., Zeng, M., Lin, J., Inman, D.J.: Enhanced mathematical modeling of the displacement amplification ratio for piezoelectric compliant mechanisms. Smart Mater. Struct. 25(7), 1–11 (2016). https://doi.org/10.1088/0964-1726/25/7/075022
Noveanu, S., Lobontiu, N., Lazaro, J., Mandru, D.: Substructure compliance matrix model of planar branched flexure-hinge mechanisms: design, testing and characterization of a gripper. Mech. Mach. Theory 91, 1–20 (2015). https://doi.org/10.1016/j.mechmachtheory.2015.04.001
Šalinić, S., Nikolić, A.: A new pseudo-rigid-body model approach for modeling the quasi-static response of planar flexure-hinge mechanisms. Mech. Mach. Theory 124, 150–161 (2018)
Kuresangsai, P., Cole, M.O.T.: Kinematic modeling and design optimization of flexure-jointed planar mechanisms using polynomial bases for flexure curvature. Mech. Mach. Theory 132, 80–97 (2019)
Lum, G.Z., Teo, T.J., Yeo, S.H., Yang, G., Sitti, M.: Structural optimization for flexure-based parallel mechanisms—towards achieving optimal dynamic and stiffness properties. Precis. Eng. 45, 195–207 (2015)
Ghafarian, M., Shirinzadeh, B., Al-Jodah, A., Das, T.K., Pinskier, J.: FEA-based optimization of a complete structure of a monolithic z/tip/tilt micromanipulator. J. Micro-Bio Robot. 16(1), 93–110 (2020)
Lee, C., Lee, J.W., Ryu, S.G., Oh, J.H.: Optimum design of a large area, flexure based XYθ mask alignment stage for a 12-inch wafer using grey relation analysis. Robot. Comput. Integr. Manuf. 58, 109–119 (2019). https://doi.org/10.1016/j.rcim.2019.02.005
Ling, M., Howell, L.L., Cao, J., Chen, G.: Kinetostatic and dynamic modeling of flexure-based compliant mechanisms: a survey. Appl. Mech. Rev. 72(3), 1–19 (2020)
Das, A.K., Pratihar, D.K.: Bonobo optimizer (BO): an intelligent heuristic with self-adjusting parameters over continuous spaces and its applications to engineering problems. Appl. Intell. 52, 2942–2874 (2021)
Dinh, V.B., Le, N., Nam, C., Le Thanh, T.P., Dao, P.: Topology—based geometry optimization for a new compliant mechanism using improved adaptive neuro-fuzzy inference system and neural network algorithm. Eng. Comput. (2021). https://doi.org/10.1007/s00366-021-01552-y
Acknowledgements
This research is supported by Industrial University of Ho Chi Minh City (IUH) under Grant Number 01/HD-DHCN.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Nguyen, D.N., Dang, M.P., Huang, SC. et al. Computational optimization of a steel A-36 monolithic mechanism by bonobo algorithm and intelligent model for precision machining application. Int J Interact Des Manuf 17, 2271–2281 (2023). https://doi.org/10.1007/s12008-022-00967-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12008-022-00967-1