
Abstract
XYZ-precision positioning stages are of great significance in micro/nanoscale manipulation applications. This paper presents a novel parallel 3-degree-of-freedom (3-DOF) XYZ precision positioning stage with compact structure. Compared with the existing parallel triaxial positioning stages, the proposed stage features more compact size in the height. A newly developed Z-shaped flexure hinge based mechanism is introduced in the design of stage to generate decoupled motions in both z-axis and y-axis based on the bending deformation of the beams and the differential moving principle, respectively. The input stiffness of the positioning stage is calculated by resorting to matrix-based method, and validated by finite-element analysis. The simulation results are shown to be almost consistent with the results of the derived analytical model with negligible errors. Moreover, the reachable workspace is determined and the maximum stress is also obtained by loading the assumed maximum input displacement on the platform. The preliminary results pave the way for promising applications of the proposed stage in the future.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Micromanipulators with high precision and quick response consist of flexure-based compliant mechanisms and piezoelectric actuators (PZTs), drawing lots of attention from widespread applications such as bio-cell manipulation (Gao et al. 2016), optical fibers alignment, micro device assembly, scanning probe microscopes, ultra-precision manufacturing, and microelectromechanical systems (MEMS) (Hao and Zhu 2019). The traditional rigid motion pair-based manipulators can no longer satisfy the manipulation requirements of high precision and fast response, due to the adverse effects of backlash and friction of the traditional rigid joints (Maeda and Iwasaki 2012). Instead, the compliant mechanism has the technological merits of easily manufacturing, being free of backlash and friction, ultrahigh repeatable precision, compactness and needless lubrication (Lobontiu 2002), since it delivers motions by using the elastic deformations of the material (Jywe et al. 2008). Therefore, compliant mechanism based manipulators have been widely employed in micron or nano-scale operation applications. On the other hand, the PZT is the most universally used driver in the compliant mechanisms, owing to the unique advantages including compact structure, easy to control, high resolution and rapid response (Gao et al. 2020).
The XYZ-precision positioning stage is one of the commonly used manipulators in various applications as aforementioned, and thus lots of investigations have been conducted by researchers. Generally, positioning stages can be divided into two types based on different kinematic schemes, namely serial and parallel positioning stages. The serial-kinematic scheme features ease of control and free of coupled motion (Wadikhaye et al. 2012), since the X, Y and Z translations connected in serial can be controlled independently, and it has been well developed by scholars and employed in commercial stages. Moreover, serial-kinematic configuration is well suited for scanning type applications (Ando et al. 2008; Leang and Fleming 2008; Picco et al. 2006), due to the requirement of one lateral axis operating much faster than the others. A three-axis serial-kinematic high-speed nanopositioning stage with kilohertz bandwidth is presented in the literature of (Kenton and Leang 2011). However, serial-kinematic configuration suffers from high inertia, low natural frequency and accumulative errors. Furthermore, the dynamic characteristics are different from each axis. In contrast, the parallel-kinematic scheme featuring the outstanding merits of low inertia, high resonant frequency, no cumulative errors and identical dynamic features in all axes, overcomes the aforementioned problems (Angeles 2002; Merlet 2006). Therefore, large amo-unt efforts have been devoted to developing XYZ parallelkinematic stages, and many of them are reported in the literature of (Cai et al. 2018; Gao et al. 2016; Hao and Li 2014; Li and Xu 2010; Liu and Li 2016; Xu and Li 2007; Zhang and Xu 2015). Nevertheless, most of the proposed positioning stages have a hulking body size in both the footprint and the height, since each of the working axis consists of a PZT embedded in the guidance or amplification compliant mechanisms and is arranged orthogonally.
In order to develop a novel XYZ positioning stage with parallel-kinematic and more compact structure, the Z-shaped flexure hinge (ZFH) based mechanism is incorporated in the design of the stage. The ZFH based mechanism is able to achieve decoupled motions at both horizontal and vertical directions by using a pair of in-plane placed PZTs, shrinking the vertical size and the overall structure dimensions of the stage. In the following sections of the paper, the mechanical design is illustrated in Sect. 2. Compliance and stiffness modeling of the stage based on matrix method are performed in Sect. 3. In Sect. 4, the finite element analysis (FEA) is conducted to verify the calculation results. Finally, some concluding remarks are summarized in Sect. 5.
2 Mechanism design
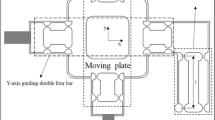
The mechanical structure of the novel proposed XYZ parallel-kinematic positioning stage based on compliant mechanisms is illustrated in Fig. 1. It is composed of four symmetric driving units made up of dual parallelogram guidance mechanisms (guidance mechanism 1), four symmetric ZFH based mechanisms connected with two symmetric parallelogram flexures (guidance mechanism 2), a pair of mirror symmetric universal parallelogram flexures (guidance mechanism 3) and a mobile platform. Moreover, the PZTs, preloaded by the screws, are fixed at the input ends of the guidance mechanism 1. The majority of compliant mechanisms mentioned above transfer motions via the right circular flexure hinges, as shown in Fig. 2, due to its high precision in rotation and constraint of lateral motions, excepting the ZFH based mechanism, which consists of three orthogonally connected leaf spring flexure hinges.

Mechanical structure of the proposed 3-DOF XYZ positioning stage

The right circular hinge
The concept of the ZFH based mechanism was first proposed by Guan and Zhu for a one-dimensional thermal actuator (Guan and Zhu 2010). After that, Zhu et al. derived the ZFH based mechanism motions in both x-axis and z-axis directions by exerting same/different opposite inward motions on the two input ends of the mechanism, and they extended its application to a two degree-of-freedom (DOF) fast tool servo system for diamond turning of optical microstructured surfaces with scattering homogenization (Zhu et al. 2014). More recently, the ZFH based mechanism has been used in the application of 2-DOF XY compliant micro/nano-positioning stage for large workspace in the literature of (Zhu et al. 2016a, c) by the same author. Moreover, a 3-DOF XY\(\Theta _z\) nano-positioning stage with simple kinematics, bi-directional motion and amplified motion range was also developed by them using the ZFH based mechanism (Zhu et al. 2016a, b, c). In this paper, the ZFH based mechanism is employed for developing a parallel 3-DOF XYZ positioning stage with compact structure for the first time.
The working principle of ZFH based mechanism can be illustrated as follows. When a pair of equal and opposite forces are exerted on two ends of the ZFH based mechanism, as shown in Fig. 3, the long beam of ZFH based mechanism will bend to accommodate the space decrease, thus driving and moving the central platform in Z direction. For the motion along y-axis, two different magnitude driving force exerted on two ends will induce such motion of the central platform based on the well-known differential moving principle (DMP). Therefore, a biaxial motion platform can be achieved through the ZFH based mechanism.

The ZFH based mechanism
As for the motion along x-axis, when the PZT 3 extends, the corresponding motion can be achieved. Combining the biaxial motion derived from the ZFH based mechanism, a compact positioning stage with 3-DOF (XYZ) is developed. It is well known that the PZTs are easily damaged by the tangential force or bending deformation caused by the coupled motion. In order to alleviate the coupled motion of the positioning stage, dual parallelogram flexures (guidance mechanism 2) are connected with the ZFH based mechanism, and a pair of mirror symmetric universal parallelogram flexures (guidance mechanism 3) are designed, as shown in Figs. 6, 7, respectively.
3 Modeling and analysis
Various approaches have been applied to model the compliant mechanisms, including pseudorigidbody (PR-B) method, nonlinear modeling approach and the matrixbased compliance/stiffness modeling method. Among these methods, the matrix-based modeling method models the flexure with the consideration of 6-D compliance in space based on the Hooke’s law of material deformation. It is well known that the matrix operations can be easily conducted with higher calculation efficiency (Dai and Ding 2006; Koseki et al. 2002), and thus the matrix-based modeling method is employed in this paper.
The compliance matrix with the coordinate frame assigned in Fig. 2 can be derived as:
Where the compliance factors with the best accuracy, as reviewed in Yong et al. (2008), are adopted in the present study.
As shown in Fig. 2, \(C_i^0=C_h\) is defined as the local compliance of the specific free end coordinate of the flexure hinge with respect to the ground, where the upper-right superscript “0” denotes the fixed end that will be omitted for the clarity of representation, and the lower-right indicates the free end. The compliance \(C_i\) is able to be transferred from one to another frame based on the following equation:
Where \(T_i^j\) is the coordinate transformation matrix.For a rotational matrix around the x-axis for the compliance matrix, namely \({\overline{R}}_x\), can be derived by:
Where \(R_x (\theta )\) describes the \(\theta\) rotation around the x-axis. In addition, \({\overline{R}}_y\) and \({\overline{R}}_z\) can be also derived in the same way.
For the translational transformation, the translational matrix can be defined in Eq. (4).
Note that \({\hat{p}}\) means the outer product with the vector \(P =(p_x,p_y,p_z)\), and P is the coordinate of the original origin with respect to the new coordinate frame. I is the identity matrix.
3.1 Input stiffness of guidance mechanisms
The guidance mechanism 1 is given in Fig. 4, and its left half part as shown in Fig. 5 is picked out for the purpose of analysis, due to the left-right symmetric property of the mechanism. The compliance of point G with respect to point \(O_1\) and \(O_4\) can be written as Eqs. (7 , 8), respectively, since the flexure hinges are connected in serial.
Furthermore, the compliance \(C_G^O\) can be derived as Eq. (9), due to the parallel connection between the two chains A and B.
Assign \(lC_G=C_G^O\) as the compliance of the left part of the guidance mechanism 1 with respect to the ground. Owing to the left-right structural symmetry as mentioned before, the compliance of the guidance mechanism 1 can be derived as:
Where \(T_r^l\) is the transformation matrix transferring from the right to left.
From which, the input stiffness can be derived as \(K_{in}=1/C\). The similar principle can also be applied to the calculation of the other stiffness of guidance mechanisms as shown in Figs. 6, 7.

Schematic of the key part of the guidance mechanism 1

Front view of the half part of the guidance mechanism 1

Schematic of the mobile platform and the guidance mechanism 2

Schematic of the guidance mechanism 3
3.2 Amplification ratio of the ZFH based mechanism
In order to establish the analytical modeling of ZFH based mechanism, half of the mechanism structure is picked out for analysis, as illustrated in Fig. 8, due to the structure symmetry.

Schematic of the ZFH based mechanism
Based on the energy method, we can obtain the following set of equations:
Where
Assuming that the virtual force P equals to zero, the deflection in the tip alone Z-axis can be derived as:
As a consequence, the amplification ratio of the ZFH based mechanism can be obtained as:
4 Finite element analysis (FEA) validation
To verify the analytical model and the performance of the proposed positioning stage, FEA numerical simulation is conducted using commercial software ANSYS. The dimensional parameters of the mechanism are given in Table 1. Aluminum alloy Al 7075-T6 is selected as the substrate for manufacturing the positioning stage, due to its comparatively low density and larger \(\sigma _s/E\) ratio value, which may acquire light-weight and higher elasticity mechanisms. The detail properties of the chosen material are: Young’s modulus E=71.7 GPa, Poisson’s ratio \(\upmu\)=0.33, density \(\rho =2.81\times 10^3\) kg/m\(^{3}\), and yield strength \(\sigma _s\)=503 MPa.
Input stiffness is an important index, and it can be derived by dividing input load with the corresponding displacement of the input end of the guidance mechanisms. Constant forces of 1N are applied to the input ends of the guidance mechanisms in FEA simulations, and the corresponding deformation displacements are given in Fig. 9. Based on the simulation results, we can easily obtain the input stiffness. Taking the FEA results as the bench mark, the comparative study results are listed in Table 2. It suggests that the predicted results calculated by the analytical models agree well with the simulation results obtained by FEA simulations.

The corresponding deformation of the guidance mechanisms, a guidance mechanism 1, b guidance mechanism 2, c guidance mechanism 3 in Y direction, d guidance mechanism 3 in Z direction
For the amplification ratio of the stage obtained by the ZFH based mechanism, it can be determined by dividing the corresponding output motion of the mobile platform with the displacement applied at the input end of the ZFH based mechanism. In the FEA simulation, a displacement of 1\(\upmu\)m is exerted on the input end as shown in Fig. 10, and the output displacement as well as the amplification ratio are obtained.

The corresponding output displacement of the ZFH based mechanism with an input displacement of 1 \(\upmu\)m
In addition, taking into account the assumed maximum stroke of 60 \(\upmu\)m of the PZT, the reachable prism-shaped workspace of the XYZ positioning stage is depicted in Fig. 11. The maximum output displacements are approximately 60 \(\upmu\)m in the X direction, 30 \(\upmu\)m in the ±Y directions and 309.6 \(\upmu\)m in the Z direction. It is worth mentioning that the maximum output displacement deviation in Z direction is around 16.56% by comparing with the FEA simulation results. The offset can be mainly linked to the structure constraint of the guidance mechanism 3. FEA simulation has also been conducted to verify the safety of the platform by applying the prescribed input displacement or input force at the input ends of the guidance mechanisms. When the assumed maximum stroke of 60 \(\upmu\)m of the PZTs are exerted on the input ends, as shown in Fig. 12, the maximal stress is 235.31 MPa, occurred in the thinnest place of the right circular hinges, which is much lower than the yield strength 503 MPa with a safety factor larger than 1.5. Therefore, the platform has enough strength in the working stroke, guaranteeing the long-term linearity and repeatability of the mechanism.

The reachable workspace of the XYZ positioning stage

Stress distribution with a displacement of 60 \(\upmu\)m of 3 PZTs
5 Conclusions
A novel 3-DOF XYZ positioning stage with compact structure is proposed in this paper. Compared with the existing triaxial stages, the introduction of ZFH based mechanisms in the design of stage reduces the height of the proposed positioning stage, achieving a compact size. Parallelogram mechanisms, serving as decoupled guidance mechanisms, are employed in the design of positioning stage to reduce the parasitic motions. The input stiffness of the stage is calculated based on matrix-based method and validated by FEA using ANSYS. The reachable workspace is determined and the maximum stress is also obtained by loading the maximum output stroke of the PZT on the platform. Future research will concentrate on the optimization of the dimension parameters of positioning stage to achieve better performance. A prototype is also expected to be fabricated to experimentally study the kinematics analysis, dynamics analysis and error analysis of the proposed stage in the upcoming work.
References
Ando T, Uchihashi T, Fukuma T (2008) High-speed atomic force microscopy for nano-visualization of dynamic biomolecular processes. Prog Surf Sci 83(7–9):337–437. https://doi.org/10.1016/j.progsurf.2008.09.001
Angeles J (2002) Fundamentals of robotic mechanical systems. Springer, Cham
Cai K, He X, Tian Y, Liu X, Zhang D, Shirinzadeh B (2018) Design of a XYZ scanner for home-made high-speed atomic force microscopy. Microsyst Technol 24(7):3123–3132. https://doi.org/10.1007/s00542-017-3674-4
Dai JS, Ding X (2006) Compliance analysis of a three-legged rigidly-connected platform device. J Mech Des 128(4):755–764. https://doi.org/10.1115/1.2202141
Gao J, Zeng Z, Tang H, Chen X, Qiu Q, He S, He Y, Yang Z (2016) Design and assessment of a piezo-actuated 3-dof flexible nanopositioner with large stroke. In: 2016 IEEE international conference on manipulation, manufacturing and measurement on the nanoscale (3M-NANO), July 2016. pp 19–24. https://doi.org/10.1109/3m-nano.2016.7824922
Gao X, Yang J, Wu J, Xin X, Li Z, Yuan X, Shen X, Dong S (2020) Piezoelectric actuators and motors: materials, designs, and applications. Adv Mater Technol 5(1):1900716. https://doi.org/10.1002/admt.201900716
Guan C, Zhu Y (2010) An electrothermal microactuator with z-shaped beams. J Micromec Microeng 20(8):085014. https://doi.org/10.1088/0960-1317/20/8/085014
Hao G, Li H (2014) Design of 3-legged xyz compliant parallel manipulators with minimised parasitic rotations. Robotica 33(4):787–806. https://doi.org/10.1017/s0263574714000575
Hao G, Zhu J (2019) Design of a monolithic double-slider based compliant gripper with large displacement and anti-buckling ability. Micromachines 10(10):665. https://doi.org/10.3390/mi10100665
Jywe WY, Jeng YR, Liu CH, Teng YF, Wu CH, Wang HS, Chen YJ (2008) A novel 5dof thin coplanar nanometer-scale stage. Precis Eng 32(4):239–250. https://doi.org/10.1016/j.precisioneng.2007.11.001
Kenton BJ, Leang KK (2011) Design and control of a three-axis serialkinematic high-bandwidth nanopositioner. IEEE/ASME Trans Mech 17(2):356–369. https://doi.org/10.1109/tmech.2011.2105499
Koseki Y, Tanikawa T, Koyachi N, Arai T (2002) Kinematic analysis of a translational 3-dof micro-parallel mechanism using the matrix method. Adv Rob 16(3):251–264. https://doi.org/10.1163/156855302760121927
Leang KK, Fleming AJ (2008) High-speed serial-kinematic afm scanner: design and drive considerations. In: 2008 American control conference, June 2008. pp 3188–3193. https://doi.org/10.1109/acc.2008.4586983
Li Y, Xu Q (2010) A totally decoupled piezo-driven xyz flexure parallel micropositioning stage for micro/nanomanipulation. IEEE Trans Autom Sci Eng 8(2):265–279. https://doi.org/10.1109/tase.2010.2077675
Liu YT, Li BJ (2016) A 3-axis precision positioning device using pzt actuators with low interference motions. Precis Eng 46:118–128. https://doi.org/10.1016/j.precisioneng.2016.04.006
Lobontiu N (2002) Compliant mechanisms: design of flexure hinges. CRC Press, Boca Raton
Maeda Y, Iwasaki M (2012) Initial friction compensation using rheology-based rolling friction model in fast and precise positioning. IEEE Trans Ind Electr 60(9):3865–3876. https://doi.org/10.1109/tie.2012.2205350
Merlet JP (2006) Parallel robots, vol 128. Springer, Netherlands
Picco L, Bozec L, Ulcinas A, Engledew D, Antognozzi M, Horton M, Miles M (2006) Breaking the speed limit with atomic force microscopy. Nanotechnology 18(4):044030. https://doi.org/10.1088/0957-4484/18/4/044030
Wadikhaye S, Yong Y, Moheimani SR (2012) Design of a compact serialkinematic scanner for high-speed atomic force microscopy: An analytical approach. Micro Nano Lett 7(4):309–313. https://doi.org/10.1049/mnl.2011.0477
Xu Q, Li Y (2007) Statics and dynamics performance evaluation for a high precision xyz compliant parallel micromanipulator. In: 2007 IEEE international conference on robotics and biomimetics (ROBIO), December 2007. pp 65–70. https://doi.org/10.1109/robio.2007.4522136
Yong YK, Lu TF, Handley DC (2008) Review of circular flexure hinge design equations and derivation of empirical formulations. Precis Eng 32(2):63–70. https://doi.org/10.1016/j.precisioneng.2007.05.002
Zhang X, Xu Q (2015) Design of a new flexure-based xyz parallel nanopositioning stage. In: 2015 IEEE international conference on robotics and biomimetics (ROBIO), December 2015. pp 1962–1966. https://doi.org/10.1109/robio.2015.7419060
Zhu Z, Zhou X, Liu Z, Wang R, Zhu L (2014) Development of a piezoelectrically actuated two-degree-of-freedom fast tool servo with decoupled motions for micro-/nanomachining. Precis Eng 38(4):809–820. https://doi.org/10.1016/j.precisioneng.2014.04.009
Zhu WL, Zhu Z, Shi Y, Chen X, He Y, Ehmann KF, Ju BF (2016a) A novel piezoelectrically actuated 2-dof compliant micro/nano-positioning stage with multi-level amplification. Rev Sci Instrum 87(10):105006. https://doi.org/10.1063/1.4965880
Zhu WL, Zhu Z, Shi Y, Wang X, Guan K, Ju BF (2016b) Design, modeling, analysis and testing of a novel piezo-actuated xy compliant mechanism for large workspace nano-positioning. Smart Mater Struct 25(11):115033. https://doi.org/10.1088/0964-1726/25/11/115033
Zhu WL, Zhu Z, To S, Liu Q, Ju BF, Zhou X (2016c) Redundantly piezoactuated xy\(\theta _z\) compliant mechanism for nano-positioning featuring simple kinematics, bi-directional motion and enlarged workspace. Smart Mater Struct 25(12):125002. https://doi.org/10.1088/0964-1726/25/12/125002
Acknowledgements
This paper is supported by Nature Science Foundation of China (51575544) and the State Key Laboratory of Ultra-precision Machining Technology in the Department of Industrial and Systems Engineering of Hong Kong Polytechnic University (BBXG).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Xie, Y., Li, Y., Cheung, C.F. et al. Design and analysis of a novel compact XYZ parallel precision positioning stage. Microsyst Technol 27, 1925–1932 (2021). https://doi.org/10.1007/s00542-020-04968-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00542-020-04968-6