
Abstract
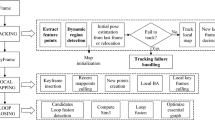
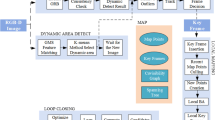
Simultaneous localization and mapping (SLAM) technology is a research hotspot in the field of intelligent mobile robot, and many researchers have developed many classic systems in the past few decades. However, most of the existing SLAM methods assume that the environment of the robot is static, which results in the performance of the system being greatly reduced in the dynamic environment. To solve this problem, a new dynamic object detection method based on point cloud motion analysis is proposed and incorporated into ORB-SLAM2. First, the method is regarded as a preprocessing stage, detecting moving objects in the scene, and then removing the moving objects to enhance the performance of the SLAM system. Experiments performed on a public RGB-D dataset show that the motion cancellation method proposed in this paper can effectively improve the performance of ORB-SLAM2 in a highly dynamic environment.
Article PDF
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
References
KERL C, STURM J, CREMERS D. Dense visual SLAM for RGB-D cameras[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems, November 3–7, 2013, Tokyo, Japan. New York: IEEE, 2013: 2100–2106.
MUR-ARTAL R, TARDOS J D. ORB-SLAM2: an open-source SLAM system for monocular, stereo and RGB-D cameras[J]. IEEE transactions on robotics, 2017, 33(5): 1255–1262.
DEWAN A, CASELITZ T, TIPALDI G D, et al. Motion-based detection and tracking in 3D LiDAR scans[C]//IEEE International Conference on Robotics and Automation, May 16–21, 2016, Stockholm, Sweden. New York: IEEE, 2016: 4508–4513.
LU Z, HU Z, UCHIMURA K. SLAM estimation in dynamic outdoor environments[J]. International journal of humanoid robotics, 2010, 7(2): 315–330.
SUN Y, LIU M, MENG M Q H. Improving RGB-D SLAM in dynamic environments: a motion removal approach[J]. Robotics and autonomous systems, 2017, 89: 110–122.
B BESCÓS, JM FÁCIL, CIVERA J, et al. Dynaslam: tracking, mapping and inpainting in dynamic scenes[J]. IEEE robotics and automation letters, 2018, 3(4): 4076–4083.
JIANG C, PAUDEL D P, FOUGEROLLE Y, et al. Static and dynamic objects analysis as a 3D vector field[C]//IEEE International Conference on 3D Vision, October 10–12, 2017, Qingdao, China. New York: IEEE, 2017: 234–243.
JAIMEZ M, KERL C, GONZALEZ-JIMENEZ J, et al. Fast odometry and scene flow from RGB-D cameras based on geometric clustering[C]//IEEE International Conference on Robotics and Automation, May 29–June 3, 2017, Singapore. New York: IEEE, 2017: 3992–3999.
SCONA R, JAIMEZ M, PETILLOT Y R, et al. Staticfusion: background reconstruction for dense RGB-D slam in dynamic environments[C]//IEEE International Conference on Robotics and Automation, May 21–25, 2018, Brisbane, QLD, Australia. New York: IEEE, 2018: 3849–3856.
YANG S, SCHERER S. CubeSLAM: monocular 3D object SLAM[J]. IEEE transactions on robotics, 2019, 35(4): 925–938.
HUANG J, YANG S, MU T J, et al. ClusterVO: clustering moving instances and estimating visual odometry for self and surroundings[C]//IEEE/CVF Conference on Computer Vision and Pattern Recognition, June 13–19, 2020, Seattle, WA, USA. New York: IEEE, 2020: 2168–2177.
ZHANG J, HENEIN M, MAHONY R, et al. VDO-SLAM: a visual dynamic object-aware SLAM system[EB/OL]. (2020-05-25) [2021-09-13]. https://arxiv.org/abs/2005.11052.
BESCOS B, CAMPOS C, TARDÓS J D, et al. Dynaslam II: tightly-coupled multi-object tracking and SLAM[J]. IEEE robotics and automation letters, 2021, 6(3): 5191–5198.
DUBÉ R, DUGAS D, STUMM E, et al. Segmatch: segment based loop-closure for 3D point clouds[EB/OL]. (2019-01-15) [2021-09-13]. https://arxiv.org/abs/1609.07720v2.
STURM J, ENGELHARD N, ENDRES F, et al. A benchmark for the evaluation of RGB-D SLAM systems[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems, October 7–12, 2012, Vilamoura, Algarve, Portugal. New York: IEEE, 2012: 573–580.
Author information
Authors and Affiliations
Corresponding author
Additional information
This work has been supported by the National Natural Science Foundation of China (No.61876167), and the Natural Science Foundation of Zhejiang Province (No.LY20F030017).
Rights and permissions
About this article

Cite this article
Gan, Y., Zhang, J., Chen, K. et al. A dynamic detection method to improve SLAM performance. Optoelectron. Lett. 17, 693–698 (2021). https://doi.org/10.1007/s11801-021-1022-5
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11801-021-1022-5