
Abstract
In this paper, we introduce a new parallel iterative method for finding a common solution of the multiple-set split feasibility and fixed point problems concerning left Bregman strongly nonexpansive mappings in Banach spaces.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Let C and Q be nonempty closed and convex subsets of real p-uniformly convex and uniformly smooth Banach spaces E and F, respectively. Let \(A:E\longrightarrow F\) be a bounded linear operator and \(A^*: F^* \rightarrow E^*\) be the adjoint of A. The split feasibility problem (SFP) is formulated as follows:
The model of SFP given above was first introduced by Censor and Elfving [11] for modeling inverse problems. We also know that it plays an important role in medical image reconstruction and signal processing (see [5, 7]). In view of its applications, several iterative algorithms of solving (1.1) were presented in [5, 7, 12, 16, 18, 29,30,31, 33,34,35,36] and references therein.
There are some generalizations of the SFP, for example, the multiple-set SFP (MSSFP) (see [12, 22]), the split common fixed point problem (SCFPP) (see [15, 23]), the split variational inequality problem (SVIP) (see [16]), the split common null point problem (SCNPP) (see [8]) and so on.
In 2014, Wang [37] modified Schopfer’s algorithm [26] and proved strong convergence for the following multiple-set split feasibility problem (MSSFP):
where \(C_i\) and \(Q_j\) are the nonempty closed convex subsets of two p-uniformly convex and uniformly smooth Banach spaces E and F, respectively. He defined for each \(n\in {\mathbb {N}}\)
where \(i:{\mathbb {N}}\rightarrow I\) is the cyclic control mapping
and \(t_n\) satisfies
with \(C_q\) defined as in Lemma 2.1 and proposed the following algorithm: For any initial guess \(x_0={\bar{x}}\), define \(\{x_n\}\) recursively by
where \(\Delta _p\) is the Bregman distance with respect to \(f(x)=\dfrac{1}{p}\Vert x\Vert ^p\), \(\Pi _C\) denotes the Bregman projection and \(J_p\) is the duality mapping. He proved the following strong convergence theorem.
Theorem 1.1
The sequence \(\{x_n\}\), generated by (1.4), converges strongly to the Bregman projection \(\Pi _S{\bar{x}}\) of \(\bar{x}\) onto the solution set S.
Note that the algorithm (1.4) studied in the above work is not the parallel one. Therefore, it takes a lot of time in computation when the family of sets \(C_i\) and \(Q_j\) are sufficiently large.
In 2016, Shehu et al. [27] constructed an iterative scheme for solving the following problem:
where T is a left Bregman strongly nonexpansive mapping of C into C. If \(T = I\), the identity map, then \(F (T ) = C\) and in this case, the problem (1.5) reduces to SFP (1.1). They proved the following result.
Theorem 1.2
Let E and F be two p-uniformly convex and uniformly smooth Banach spaces. Let C and Q be nonempty, closed and convex subsets of E and F, respectively, \(A : E\rightarrow F\) be a bounded linear operator and \(A^*: F^* \rightarrow E^*\) be the adjoint of A. Suppose that SFP (1.1) has a nonempty solution set S. Let T be a left Bregman strongly nonexpansive mapping of C into C such that \(F(T)={\hat{F}}(T)\) and \(F(T)\cap S\ne \emptyset \). Let \(\{\alpha _n\}\) be a sequence in (0, 1). For a fixed \(u\in E_1\), let sequence \(\{x_n\}\) be iteratively generated by \(u_1\in E_1\)
Suppose the following conditions are satisfied:
-
(i)
\(\displaystyle \lim _{n\rightarrow \infty } \alpha _n =0\),
-
(ii)
\(\displaystyle \sum _{n=1}^{\infty } \alpha _n =\infty ,\)
-
(iii)
\(0<t\le t_n\le k<\bigg (\dfrac{q}{C_q\Vert A\Vert ^q}\bigg )^{1/(q-1)}.\)
Then \(\{x_n\}\) converges strongly to an element \(x^*\in F(T)\cap S\), where \(x^*=\Pi _{F(T)\cap S}u\).
In this paper, we study the above works for a more generalized case
where \(C_i\) and \(Q_j\) are the nonempty closed convex subsets of two p-uniformly convex and uniformly smooth Banach spaces E and F, respectively, \(F(T_k)\) is the set of fixed point of left Bregman strongly nonexpansive mapping \(T_k:\ E\longrightarrow E\) such that \({\hat{F}}(T_k)=F(T_k)\), and \(A:\ E\longrightarrow F\) is a bounded linear operator. We shall introduce a new strongly convergent, parallel and explicit iterative algorithm with the similar condition (1.3) on the iterative parameter.
The rest of this paper is organized as follows. In Sect. 2, we list some related facts that will be used in the proof of our result. In Sect. 3, we introduce a new parallel iterative algorithm and prove a strong convergence theorem for this algorithm. Finally, in Sect. 4, we give two numerical examples for illustrating the main result.
2 Preliminaries
In this section, we recall some definitions and results which will be used later. Let E be a real Banach space with the dual space \(E^*\). For the sake of simplicity, the norms of E and \(E^*\) are denoted by the symbol \(\Vert .\Vert \) and we use \(\langle x,f\rangle \) instead of f(x) for \(f\in E^*\) and \(x\in E\).
The modulus of convexity \(\delta _E:\ [0,2]\longrightarrow [0,1]\) is defined by
for all \(\varepsilon \in [0,1]\). The modulus of smoothness \(\rho _E:\ [0,\infty )\longrightarrow [0,\infty )\) is defined as
for all \(\tau \in [0,\infty )\). Recall that a Banach space E is said to be
-
(i)
uniformly convex if \(\delta _E(\varepsilon )>0\) for all \(\varepsilon \in (0,2]\) and p-uniformly convex if there exists \(c_p>0\) such that \(\delta _E(\varepsilon )\ge c_p\varepsilon ^p\) for all \(\varepsilon \in (0,2]\).
-
(ii)
uniformly smooth if \(\displaystyle \lim _{\tau \rightarrow 0}\rho _E(\tau )/\tau =0\) and q-uniformly smooth if there is \(C_q>0\) such that \(\rho _E(\tau )\le C_q\tau ^q\) for all \(\tau >0\).
The \(L_p\) space is 2-uniformly convex for \(1<p\le 2\) and p-uniformly convex for \(p\ge 2\). Let \(1<q\le 2\le p\) with \(1/p+1/q=1\). It is well-known that E is p-uniformly convex if and only if its dual \(E^*\) is q-uniformly smooth (see [24]).
The duality mapping \(J_p:\ E\longrightarrow 2^{E^*}\) is defined by
It is also well-known that if E is p-uniformly convex and uniformly smooth, then its dual space \(E^*\) is q-uniformly smooth and uniformly convex. And in this situation, the duality mapping \(J_p\) is one-to-one, single valued and satisfies \(J_p=(J_q^*)^{-1}\), where \(J_q^*\) is the duality mapping of \(E^*\) (see [1, 17]).
We have the following lemma:
Lemma 2.1
[32] Let \(x,y\in E\). If E is q-uniformly smooth, then there is a \(C_q>0\) such that
Let \(f:\ E\longrightarrow (-\infty ,+\infty ]\) be a convex and Gâteaux differentiable function. The function \(D_f:\ \text {dom}f\times \text {int dom}f\longrightarrow [0,+\infty )\), defined by
is called the Bregman distance with respect to f (see [13]).
If E is a smooth and strictly Banach space and \(f(x)=\dfrac{1}{p}\Vert x\Vert ^p\), then \(\bigtriangledown f(x)=J_p(x)\) and thus the Bregman distance with respect to f is given by
It is easy to show that, for any \(x,y,z\in E\), we have
We know that if E is p-uniformly convex, then the Bregman distance has the following property:
for all \(x,y\in E\) and for some fixed number \(\tau >0\).
Now, let C be a nonempty closed convex subset of E. The metric projection
is the unique minimum point of the norm distance, which can be characterized by the following variational inequality (see [20]):
The Bregman projection
as the minimum point of the Bregman distance (see [6]). The Bregman projection can also be characterized by the following variational inequality:
It follows that
Let C be a convex subset of int domf with \(f(x)=\dfrac{1}{p}\Vert x\Vert ^p\), \(2\le p<\infty \) and let T be a self-mapping of C. A point p in the closure of C is said to be an asymptotic fixed point of T (see [14, 25]) if C contains a sequence \(\{x_n\}\) which converges weakly to p such that the strong \(\lim \nolimits _{n\rightarrow \infty }\Vert x_n-T(x_n)\Vert =0\). The set of asymptotic fixed points of T will be denoted by \({\hat{F}} (T)\). The operator T is called left Bregman strongly nonexpansive (L-BSNE) with respect to a nonempty \({\hat{F}} (T)\) (see [21]) if
for all \(p\in {\hat{F}} (T)\) and \(x\in C\), and if whenever \(\{x_n\}\subset C\) is bounded, \(p\in {\hat{F}} (T)\), and
it follows that
3 Main results
We consider the problem: find an element \(x^\dagger \) such that
To solve the Problem (3.1), we introduce the following algorithm:
Algorithm 3.1
For any initial guess \(x_0=x\in E\), define the sequence \(\{x_n\}\) by
where, \(\{t_n\}\) satisfies the condition (1.3).
First of all, we prove the following propositions.
Proposition 3.1
In the Algorithm 3.1, we have that \(S\subset H_n\cap D_n\) for all \(n\ge 0\).
Proof
First, it is easy to see that \(H_n\) and \(D_n\) are closed convex subsets of E.
Let \(u\in S\), we have
From the property of the Bregman projection in (2.7), we have
Now, we will show that \(\Delta _p(z_n,u)\le \Delta _p(y_n,u)\). Let \(w_n=A(y_n)-P_{Q_{j_n}}A(y_n)\). Then we have
From the definition of \(J_p\) and (2.5), we have
Thus, from Lemma 2.1 and (3.4), we get that
From the condition (1.3), we obtain that
So, from (3.2), (3.3) and (3.5), we get that \(u\in H_n\). Hence, \(S\subset H_n\) for all \(n\ge 0\).
Finally, we show that \(S\subset D_n\) for all \(n\ge 0\). Indeed, \(D_0=E\), so \(S\subset D_0\). Suppose that \(S\subset D_n\) for some \(n\ge 0\), then \(S\subset H_n\cap D_n\). Thus, from \(x_{n+1}=\Pi _{H_n\cap D_n}(x_0)\) and (2.6), we have
so that \(u\in D_{n+1}\). By induction, we obtain that \(S\subset D_n\) for all \(n\ge 0\). \(\square \)
Proposition 3.2
In the Algorithm 3.1, we have that \(x_{n+1}-x_n\rightarrow 0\) as \(n\rightarrow \infty \).
Proof
From the Proposition 3.1, we have that the sequence \(\{x_n\}\) is well-defined.
Fixing \(u\in S\). It follows form \(x_{n+1}=\Pi _{H_n\cap D_n}(x_0)\) and (2.7) that
Hence, the sequence \(\{\Delta _p(x_{n},u)\}\) is bounded. Thus, from (2.4), the sequence \(\{x_n\}\) also is bounded.
Now, from \(x_{n+1}\in D_n\) and from the definition of \(D_n\), we have
So, we obtain that
Thus, from (2.4), we have
Hence, from (2.3), we get that
This is equivalent to
which implies that the sequence \(\{\Delta _p(x_0,x_n)\}\) is increasing. Thus, from the boundedness of \(\{\Delta _p(x_0,x_n)\}\), there is the finite limit
So, from (3.10), we obtain that \(\lim \nolimits _{n\rightarrow \infty }\Delta _p (x_n,x_{n+1})=0\). It follows from (2.4) that
\(\square \)
Proposition 3.3
In the Algorithm 3.1, we have the sequences \(\{x_n-y_n\}\), \(\{x_n-z_n\}\) and \(\{x_n-t_n\}\) converge to zero as \(n\rightarrow \infty \).
Proof
Since \(x_{n+1}\in H_n\), we have
Thus, from the Proposition 3.2 (\(\Delta (x_n,x_{n+1})\rightarrow 0\)), we obtain that
It follows from (2.4) that
which combining with \(\Vert x_{n+1}-x_n\Vert \rightarrow 0\), we get that
\(\square \)
Proposition 3.4
In the Algorithm 3.1, we have that \(\omega _w(x_n)\subset S\).
Proof
We will prove this proposition by several steps.
Clearly, the \(\omega _w(x_n)\ne \emptyset \) because the \(\{x_n\}\) is bounded. Let \({\bar{x}}\in \omega _w(x_n)\), there is a subsequence \(\{x_{n_k}\}\) of \(\{x_n\}\) which converges weakly to \({\bar{x}}\).
Step 1. \({\bar{x}}\in \bigcap \nolimits _{k=1}^KF(T_k)\)
From the Proposition 3.3, we have \(t_n-z_n\rightarrow 0\) and it follows that \(\Delta _p(t_n,z_n)\rightarrow 0\). Thus, from the definition of \(t_n\), we obtain that \(\Delta _p(t_{k,n},z_n)\rightarrow 0\), that is \(\Delta _p(T_k(z_n),z_n)\rightarrow 0\) for all \(k=1,2,\ldots ,K\). Therefore, we obtain that \({\bar{x}} \in {\hat{F}} (T_k)=F(T_k)\) for all \(k=1,2,\ldots ,K\). This implies that \({\bar{x}}\in \bigcap \nolimits _{k=1}^KF(T_k).\)
Step 2. \({\bar{x}}\in \bigcap \nolimits _{i=1}^N C_i\)
From Proposition 3.3, we have \(\Delta _p(y_n,x_n)\rightarrow 0\). So, it follows from the definition of \(y_n\) that \(\Delta _p(y_{i,n},x_n)\rightarrow 0\) and hence
for all \(i=1,2,\ldots ,N\).
We need to prove that \(\Delta _p({\bar{x}}, \Pi _{C_i}({\bar{x}}))=0\) for all \(i=1,2,\ldots ,N\). Indeed, from (2.3), (2.6) and (2.4), we have the following estimate
From (3.11), letting \(k\rightarrow \infty \) yields \(\Delta _p({\bar{x}}, \Pi _{C_i}({\bar{x}}))=0\) for all \(i=1,2,\ldots ,N\), that is \({\bar{x}}\in C_i\) for all \(i=1,2,\ldots ,N\) or \({\bar{x}} \in \bigcap \nolimits _{i=1}^N C_i\).
Step 3. \({\bar{x}}\in \bigcap \nolimits _{j=1}^MA^{-1}Q_j\)
From the Proposition 3.3, we have \(\Delta _p(z_n,y_n)\rightarrow 0\). Thus, from the definition of \(z_n\), we get that \(\Delta _p(z_{j,n},y_n)\rightarrow 0\) and hence we obtain
for all \(j=1,2,\ldots ,M\).
Since E is uniformly Banach space, the duality mapping \(J_p\) is uniformly continuous on bounded sets (see [17, Theorem 2.16]) and hence we have
Since \(0<t\le t_n\) for all n, we obtain
Let us now fix some \(u\in S\), then \(A(u)\in Q_j\) for all \(j=1,2,\ldots ,M\). It follows from (2.5) that
which combines with (3.13), we obtain that
for all \(j=1,2,\ldots ,M\) and \(K_0=\Vert A\Vert (\sup _{k}\Vert y_{n_k}\Vert +\Vert u\Vert )<\infty \).
Now, from (2.5), we have
From the continuity of A, \(x_n-y_n\rightarrow 0\) and \(x_{n_k}\rightharpoonup {\bar{x}}\), we get that \(A(y_{n_k})\rightharpoonup A({\bar{x}})\). Hence, letting \(k\rightarrow \infty \) and using (3.14), we obtain
for all \(j=1,2,\ldots ,M\), that is \(A({\bar{x}})\in \bigcap \nolimits _{j=1}^MA^{-1}Q_j\).
Thus, from Step 1, Step 2 and Step 3, we conclude that \({\bar{x}}\in S\). Since \({\bar{x}}\) is arbitrary, \(\omega _w(x_n)\subset S\). \(\square \)
Now, we are in position to prove our main result.
Theorem 3.5
In the Algorithm 3.1, we have that the sequence \(\{x_n\}\) converges strongly to \(x^\dagger =\Pi _S(x_0)\), as \(n\rightarrow \infty \).
Proof
Suppose that \(\{x_{n_k}\}\) is a subsequence of \(\{x_n\}\) such that \(x_{n_k}\rightharpoonup x^*\). Then, from the Proposition 3.4 we have \(x^*\in S\).
Since \(x_{n+1}=\Pi _{H_n\cap D_n}(x_0)\), \(x_{n+1}\in D_n\). Thus, from \(\Pi _S(x_0)\in S\subset D_n\), we have
which combines with \(\Delta _p(x_{n+1},x_0)\ge \Delta _p(x_{n},x_0)\), we obtain that
Thus, from (2.2), (2.3) and (3.15), we get
So, we have
which implies that \(\lim \nolimits _{k\rightarrow \infty }\Delta _p(x_{n_k},\Pi _S(x_0))=0\) and hence \(x_{n_k}\rightarrow \Pi _S(x_0)\) thanks to (2.4). By the uniqueness of Bregman projection \(\Pi _S(x_0)\), we obtain that the sequence \(\{x_n\}\) converges weakly to \(\Pi _S(x_0)\). Now, from (2.4), there exists a \(\tau >0\) such that
Letting \(n\rightarrow \infty \), we conclude that \(x_n\rightarrow x^\dagger =\Pi _S(x_0)\). \(\square \)
Next, from Theorem 3.5, we have two following corollaries. First, we have an algorithm for solving the MSFP in two Banach spaces.
Corollary 3.6
Let \(C_i\), \(i=1,2,\ldots ,N\) and \(Q_j\), \(j=1,2,\ldots ,M\) be the nonempty closed convex subsets of two p-uniformly convex and uniformly smooth Banach spaces E and F, respectively. Let \(A:\ E\rightarrow F\) be a bounded linear operator. Suppose that \(S=\big (\bigcap \nolimits _{i=1}^NC_i\big )\bigcap \big (\bigcap \nolimits _{j=1}^MA^{-1}(Q_j)\big )\ne \emptyset \). If the sequence \(\{t_n\}\) satisfies the condition (1.3), then the sequence \(\{x_n\}\) generated by \(x_0\in E\) and
converges strongly to \(x^\dagger =\Pi _S(x_0)\), as \(n\rightarrow \infty \).
Proof
Apply Theorem 3.5 with \(T_k(x)=x\) for all \(x\in E\) and for all \(k=1,2,\ldots ,K\), we get the proof of this corollary. \(\square \)
Finally, we have the following result for the problem of finding a common fixed point of a finite family of L-BSNE operators in Banach spaces.
Corollary 3.7
Let E be a p-uniformly convex and uniformly smooth Banach space. Let \(T_k:\ E\rightarrow E\), \(k=1,2,\ldots ,K\) be the left Bregman strongly nonexpansive mappings such that \({\hat{F}}(T_k)=F(T_k)\) and \(S=\bigcap \nolimits _{k=1}^KF(T_k)\ne \emptyset \). Then the sequence \(\{x_n\}\) generated by \(x_0\in E\) and
converges strongly to \(x^\dagger =\Pi _S(x_0)\), as \(n\rightarrow \infty \).
Proof
Apply Theorem 3.5 with \(E\equiv F\) and \(C_i=Q_j=E\) for all \(i=1,2,\ldots ,N\) and for all \(j=1,2,\ldots ,M\), and \(A=I\), we get the proof of this corollary. \(\square \)
4 Numerical test
Example 4.1
We consider the Problem (3.1) with \(C_i\subset {\mathbb {R}}^n\) and \(Q_j\subset {\mathbb {R}}^m\) which are defined by
where \(a^C_i\in {\mathbb {R}}^{\mathcal {N}}, a^Q_j\in {\mathbb {R}}^{\mathcal {M}}\) and \(b^C_i, b^Q_j\in {\mathbb {R}}\) for all \(i=1,2,\ldots ,N\) and for all \(j=1,2,\ldots ,M\), \(T_k\) is metric projection from \({\mathbb {R}}^{\mathcal {N}}\) onto \(S_k\) with
for all \(k=1,2,\ldots ,K\), and A is bounded linear operator from \({\mathbb {R}}^{\mathcal {N}}\) into \({\mathbb {R}}^{\mathcal {M}}\) with its matrix which has the elements are randomly generated in [2, 4].
Next, we take the randomly generated values of the coordinates of \(a^C_i\), \(a^Q_j\) in [1, 3] and \(b^C_i\), \(b^Q_j\) in [2,4], the center \(I_k\) in \([-1,1]\) and the radius \(R_k\) of \(S_k\) in [2, 10], respectively.
Clearly, the \(S=\big (\bigcap \nolimits _{i=1}^N C_i\big )\bigcap \big (\bigcap \nolimits _{j=1}^M A^{-1}(Q_j)\big )\bigcap \big (\bigcap \nolimits _{k=1}^K F(T_k)\big )\ne \emptyset \), because \(0\in S\).
Now, we will test the Algorithm 3.1, with the initial \(x_0\in {\mathbb {R}}^{\mathcal {N}}\) where its coordinates are also randomly generated in \([-5,5]\), \({\mathcal {N}}=20\), \({\mathcal {M}}=40\), \(N=50\), \(M=100\), \(K=200\) and \(t_n=\dfrac{1}{2\Vert A\Vert ^2}\). After five attempts with randomized data, we obtain the following table of results (see Table 1).
Remark 4.2
In the above example, the function TOL is defined by
for all \(n\ge 1\). Note that, if at the nth step, \(\hbox {TOL}_n=0\) then \(x_n\in S\) that is, \(x_n\) is a solution of this problem.
Example 4.3
We take \(E=F=L_2([0,1])\) with the inner product
and the norm
for all \(f,g\in L_2([0,1]).\)
Now, let
where \(a_i(t)=t^{i-1}\), \(b_i=\dfrac{1}{i+1}\) for all \(i=1,2,\ldots , N\) and \(t\in [0,1]\),
in which \(c_j(t)=t+j\), \(d_j=\dfrac{1}{4}\) for all \(j=1,2,\ldots ,M\) and \(t\in [0,1]\), and
in here \(S_k=\{x\in L_2([0,1]):\ \Vert x-I_k\Vert \le k+1\},\) with \(I_k(t)=t+k\) for all \(k=1,2,\ldots , K\) and \(t\in [0,1]\).
Let us assume that
We consider the problem of finding an element \(x^\dagger \) such that
It is easy to see that \(S\ne \emptyset \), because \(x(t)=t\in S\).

The behavior of \(\Vert x_{n+1}-x_n\Vert \) with the stop condition \(\Vert x_{n+1}-x_n\Vert <10^{-3}\)

The behavior of \(x_n(t)\) with the stop condition \(\Vert x_{n+1}-x_n\Vert <10^{-2}\)

The behavior of \(x_n(t)\) with the stop condition \(\Vert x_{n+1}-x_n\Vert <10^{-3}\)
We have
and
Using Algorithm 3.1 with \(N=10,\) \(M=20\) and \(K=40\), we obtain the following table of numerical results.

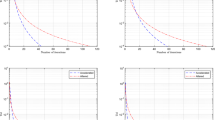
The behavior of \(x_n(t)\) with the stop condition \(\Vert x_{n+1}-x_n\Vert <10^{-7}\)
The behavior of \(\Vert x_{n+1}-x_n\Vert \) in Table 2 is described in the Fig. 1.
The behaviors of the approximation solution \(x_n(t)\) in both of the cases \(\Vert x_{n+1}-x_n\Vert <10^{-2}\) and \(\Vert x_{n+1}-x_n\Vert <10^{-3}\) are presented in Figs. 2 and 3.
Now, we consider a special case of problem (4.1) as follows:
where \(C=C_2\), \(Q=Q_2\) and \(T=T_2\).
Applying algorithms (1.6) and (3.1) with \(t_n=1\) and \(\alpha _n =\dfrac{1}{n}\) for all \(n\ge 1\), and \(u(t)=x_0(t)=\text {exp}(t^2+1)\) for all \(t\in [0,1]\), we get the following table of numerical results.
Figure 4 show the behaviors of the approximation solutions \(x_n(t)\) for the case \(\Vert x_{n+1}-x_n\Vert <10^{-7}\) in Table 3.
References
Alber, Y. I.: Metric and generalized projections in Banach spaces: properties and applications. In: Theory and Applications of Nonlinear Operators of Accretive and Monotone Type vol 178 of Lecture Notes in Pure and Applied Mathematics (pp. 15–50), USA, Dekker, New York, NY (1996)
Alber, Y.I., Reich, S.: An iterative method for solving a class of nonlinear operator in Banach spaces. Panamer. Math. J. 4, 39–54 (1994)
Alvarez, F.: On the minimizing property of a second order dissipative system in Hilbert space. SIAM J. Control Optim. 38(4), 1102–1119 (2000)
Beer, G.: Topologies on Closed and Closed Convex Sets. Kluwer Academic, Dordrecht (1993)
Byrne, C.: Iterative oblique projection onto convex sets and the split feasibility problem. Inverse Probl. 18(2), 441–453 (2002)
Butnariu, D., Resmerita, E.: Bregman distances, totally convex functions and a method for solving operator equations in Banach spaces. Abstr. Appl. Anal. 2006, 1–39 (2006)
Byrne, C.: A unified treatment of some iterative algorithms in signal processing and image reconstruction. Inverse Probl. 18, 103–120 (2004)
Byrne, C., Censor, Y., Gibali, A., Reich, S.: The split common null point problem. J. Nonlinear Convex Anal. 13, 759–775 (2012)
Burachik, R.S., Iusem, A.N., Svaiter, B.F.: Enlargement of monotone operators with applications to variational inequalities. Set-Valued Anal. 5, 159–180 (1997)
Burachik, R.S., Svaiter, B.F.: \(\varepsilon \)-Enlargements of maximal monotone operators in Banach spaces. Set-Valued Anal. 7, 117–132 (1999)
Censor, Y., Elfving, T.: A multiprojection algorithm using Bregman projections in a product space. Numer. Algorithms 8(2–4), 221–239 (1994)
Censor, Y., Elfving, T., Kopf, N., Bortfeld, T.: The multiple-sets split feasibility problem and its application. Inverse Probl. 21, 2071–2084 (2005)
Censor, Y., Lent, A.: An iterative row-action method for interval convex programming. J. Optim. Theory Appl. 34, 321–353 (1981)
Censor, Y., Reich, S.: Iterations of paracontractions and firmly nonexpansive operators with applications to feasibility and optimization. Optimization 37, 323–339 (1996)
Censor, Y., Segal, A.: The split common fixed point problem for directed operators. J. Convex Anal. 16, 587–600 (2009)
Censor, Y., Gibali, A., Reich, S.: Algorithms for the split variational inequality problems. Numer. Algorithms 59, 301–323 (2012)
Cioranescu, I.: Geometry of Banach Spaces, Duality Mappings and Nonlinear Problems. Kluwer, Dordrecht (1990)
Dadashi, V.: Shrinking projection algorithms for the split common null point problem. Bull. Aust. Math. Soc. 99(2), 299–306 (2017)
Goebel, K., Kirk, W.A.: Topics in Metric Fixed Point Theory, Cambridge Stud. Adv. Math., vol. 28. Cambridge Univ. Press, Cambridge (1990)
Goebel, K., Reich, S.: Uniform Convexity, Hyperbolic Geometry, and Nonexpansive Mappings. Marcel Dekker, New York (1984)
Martin-Marquez, V., Reich, S., Sabach, S.: Bregman strongly nonexpansive operators in reflexive Banach spaces. J. Math. Anal. Appl. 400, 597–614 (2013)
Masad, E., Reich, S.: A note on the multiple-set split convex feasibility problem in Hilbert space. J. Nonlinear Convex Anal. 8, 367–371 (2007)
Moudafi, A.: The split common fixed point problem for demicontractive mappings. Inverse Probl. 26, 055007 (2010)
Lindenstrauss, J., Tzafriri, L.: Classical Banach Spaces II. Springer, Berlin (1979)
Reich, S.: A weak convergence theorem for the alternating method with Bregman distances. In: Theory and Applications of Nonlinear Operators of Accretive and Monotone Type, pp. 313–318 . Marcel Dekker, New York (1996)
Schopfer, F., Schuster, T., Louis, A.K.: An iterative regularization method for the solution of the split feasibility problem in Banach spaces. Inverse Probl. 24, 055008 (2008)
Shehu, Y., Iyiola, O.S., Enyi, C.D.: An iterative algorithm for solving split feasibility problems and fixed point problems in Banach spaces. Numer. Algorithms 72, 835–864 (2016)
Takahashi, W.: The split feasibility problem in Banach spaces. J. Nonlinear Convex Anal. 15, 1349–1355 (2014)
Takahashi, W.: The split feasibility problem and the shrinking projection method in Banach spaces. J. Nonlinear Convex Anal. 16, 1449–1459 (2015)
Takahashi, S., Takahashi, W.: The split common null point problem and the shrinking projection method in Banach spaces. Optimization 65(2), 281–287 (2016)
Takahashi, W.: The split common null point problem in Banach spaces. Arch. Math. 104, 357–365 (2015)
Xu, H.K.: Inequalities in Banach spaces with applications. Nonlinear Anal. 16, 1127–1138 (1991)
Xu, H.K.: A variable Krasnosel’skii–Mann algorithm and the multiple-set split feasibility problem. Inverse Probl. 22, 2021–2034 (2006)
Xu, H.K.: Iterative methods for the split feasibility problem in infinite dimensional Hilbert spaces. Inverse Probl. 26, 105018 (2010)
Yang, Q.: The relaxed CQ algorithm for solving the problem split feasibility problem. Inverse Probl. 20, 1261–1266 (2004)
Wang, F., Xu, H.K.: Cyclic algorithms for split feasibility problems in Hilbert spaces. Nonlinear Anal. 74, 4105–4111 (2011)
Wang, F.: A new algorithm for solving the multiple-sets split feasibility problem in Banach spaces. Numer. Funct. Anal. Optim. 35, 99–110 (2014)
Acknowledgements
The authors would like to thank the referees and the editor for their valuable comments and suggestions, which helped to improve this paper. The first author was supported by the Science and Technology Fund of the Vietnam Ministry of Education and Training (B 2019).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Tuyen, T.M., Ha, N.S. A strong convergence theorem for solving the split feasibility and fixed point problems in Banach spaces. J. Fixed Point Theory Appl. 20, 140 (2018). https://doi.org/10.1007/s11784-018-0622-6
Published:
DOI: https://doi.org/10.1007/s11784-018-0622-6