
Abstract
This paper presents a numerical method for the solution of a Volterra–Fredholm integral equation in a Banach space. Banachs fixed point theorem is used to prove the existence and uniqueness of the solution. To find the numerical solution, the integral equation is reduced to a system of linear Fredholm integral equations, which is then solved numerically using the degenerate kernel method. Normality and continuity of the integral operator are also discussed. The numerical examples in Sect. 5 illustrate the applicability of the theoretical results.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Integral equation is very important in continuum mechanics, geophysics, potential theory and biology, quantum mechanics, optimal control systems, population genetics, medicine and fracture mechanics, solid mechanics, economic problems, phase transitions, electrostatics, and others [12, 19]. Many problems of mathematical physics, applied mathematics, and engineering are reduced to Volterra–Fredholm integral equations, see [1,2,3, 5, 15, 16, 20], for this, many different methods are used to solve this type of equations analytically [11,12,13, 17]. In addition, for numerical methods, see [4, 7, 8, 10, 18].
In this paper, we consider the Volterra–Fredholm integral equation of the second kind with continuous kernels with respect to time and position. We use a numerical method to transform the Volterra–Fredholm integral equation to system of linear Fredholm integral equations, where the existence and the uniqueness of the solution of the system of linear Fredholm integral equations can be discussed and proved using Picard’s method and Banach’s fixed point method.
Consider the following Volterra–Fredholm integral equation:
where \(\gamma \) is a constant, the function y(u, t) is unknown in the Banach space \( L_{2}[0,1]\times C[0,T],\,0\le T<1, [0,1]\) is the domain of integration with respect to the position and the time \(t\in [0,T].\) The kernels \(\Phi (t,\tau ), \Psi (t,\tau )\) are continuous in C[0, T] and the known function g(u, t) is continuous in the space \(L_{2}[0,1]\times C[0,T],\,0\le t\le T.\) In addition, the kernel of position w(u, v) belongs to \(C([0,1]\times [0,1])\).
2 The existence and uniqueness of solution of the Volterra–Fredholm integral equation
In this paper, we assume the following conditions:
-
(i)
\(|w(u,v)|< C\), \(\hbox {C}\) is a constant;
-
(ii)
\(|\Phi (t,\tau )|\le A\), \(|\Psi (t,\tau )|\le B\), A, B are constants
\(\forall \,t,\tau \in [0,T],\,0\le \tau \le t\le T\);
-
(iii)
\(\Vert g(u,t)\Vert =\max \nolimits _{0<t\le T}\int _{0}^{t}\left[ \int _{0}^{1}g^{2}(u,\tau )\mathrm{d}u\right] ^{\frac{1}{2}}\mathrm {d}\tau =D\), \(\hbox {D}\) is a constant.
Theorem 2.1
Let the conditions (i)–(iii) be satisfied. If the condition
is satisfied, then Eq. (1.1) has an unique solution y(u, t) in the space, \( L_{2}[0,1]\times C[0,T]\).
Proof
To prove this theorem, we use the successive approximation method (Picard’s method). Therefore, we assume that the solution of Eq. (1.1) takes the form:
where
where the functions \(G_{i}(u,t),\, i=0,1,\ldots ,n\) are continuous functions of the form:
\(\square \)
Now, we should prove the following lemmas:
Lemma 2.2
The series \(\sum _{i=0}^{n}G_{i}(u,t)\) is uniformly convergent to a continuous solution function y(u, t).
Proof
We structure a sequence \(y_{n}(u,t)\) defined by
Then, we get
From Eq. (2.2) and using the properties of the norm, we obtain
for \(n=1\), we get from formula (2.6)
Using conditions (i), (ii) and (iii), we have
where
so that Eq. (2.8) becomes
by induction, we get
Since
this leads us to say that the sequence \(y_{n}(u,t)\) has a convergent solution. So that, for \(n\rightarrow \infty ,\) we have
which represents an infinite convergent series. \(\square \)
Lemma 2.3
The function y(u, t) of the series (2.12) represents an unique solution of Eq. (1.1).
Proof
To show that y(u, t) is the unique solution, we assume that there exists a different continuous solution \(\tilde{y}(u,t)\) of Eq. (1.1), then we obtain
Using conditions (i) and (ii), we get
The formula (2.15) can be adapted as:
Since \(\eta <1\), so that \(y(u,t)=\tilde{y}(u,t),\) that is the solution is unique. \(\square \)
3 The normality and continuity of the integral operator
Equation (1.1) can be written in the following integral operator form:
where
3.1 The normality of the integral operator
For the normality, we use Eq. (3.1) to get
Using conditions (i) and (ii), we get
since
where
Therefore, the integral operator V has a normality, which leads immediately after using the condition (iii) to the normality of the operator \(\overline{V}\).
3.2 The continuity of the integral operator
For the continuity, we suppose the two potential functions \(y_{1}(u,t)\) and \(y_{2}(u,t)\) in the space \( L_{2}[0,1]\times C[0,T]\) are satisfied Eq. (3.1), then
Using Eqs. (3.2) and (3.3), we get
Using conditions (i) and (ii), we get
where
so that last inequality becomes
with
Inequality (3.4) leads us to the continuity of the integral operator \(\overline{V}\). So that, \(\overline{V}\) is a contraction operator. Therefore by Banach’s fixed point theorem, there is an unique fixed point y(u, t), which is the solution of the linear mixed integral Eq. (1.1).
4 The reduced system of Fredholm integral equations and its solution
4.1 Quadratic numerical method [6]
We tend to use the quadratic numerical method to reduce the solution of the Eq. (1) to the system of linear Fredholm integral equations of the second kind. We divide the interval \([0,T],\,0\le t\le T,\) as \(0=t_{0}<t_{1}<\cdots<t_{i}<\cdots <t_{N}=T,\) where \(t=t_{i},\,i=0,1,\ldots ,N;\) to get
The Volterra integral terms can be written as follows:
where
The values of the weight formula \(\mu _{j},\nu _{j}\) and the constants \(\wp _{1},\wp _{2}\) depend on the number of derivatives of \( \Phi (t, \tau )\) and \( \Psi (t, \tau )\), \(\forall \tau \in [0, T],\) with respect to t.
Using Eqs. (4.2), (4.3) in Eq. (4.1), we get
Substituting the following notations:
we can rewrite Eq. (4.4) in the form
where \(\delta _{i}=(1-\gamma _{i}),\quad \gamma _{i}=\gamma \nu _{i}\Psi _{i,i}.\)
Equation (4.5), for \(\delta _{i}\ne 0,\) represents a system of linear Fredholm integral equations of the second kind, while for \(\delta _{i}=0,\) we have system of linear Fredholm integral equations of the first kind. The solution of the system (4.5), for \(\delta _{i}\ne 0,\) can be obtained see [6, 14]. If we obtain, first, the value of \(y_{0}(x)\), and let \(i=0\) in the system (4.5), we get
After obtaining the solution of Eq. (4.6), we can use the mathematical induction to obtain the general solution of (4.5).
4.2 The procedure of solution using degenerate kernel method
Here, we can find that the solution of the linear algebraic integral system (4.5) by applying the degenerate kernel method [11] naturally leads one to consider replacement the given w(u, v) approximately by a degenerate kernel \(w_{n}(u,v),\) that is
where the set of functions \(\{M_{l}(u)\}\) and \(\{N_{l}(v)\}\) are assumed to be linearly independent and the degenerate kernel \(w_{n}(u,v)\) should satisfy the condition
Hence, the solution of Eq. (4.5) related to the degenerate kernels \(w_{n}(u,v)\) takes the form:
Using Eq. (4.7) in Eq. (4.9), we have
We introduce the notations
where \(\alpha _{j}^{l}\) are unknown constants. Then, Eq. (4.10) takes the form:
Substituting from Eq. (4.12) into Eq. (4.11), we get
Define the function
Equation (4.13) represents a system of linear algebraic equations which can be written in the following form [9]:
Formula (4.15) represents a system of linear algebraic equations and we can solve it numerically. After we get the values of \(\alpha _{j}^{r}\), we can immediately determine the values of the functions \( y_{i}(u)\).
Lemma 4.1
Let \(w_{n}(u,v)\in C([0,1]\times [0,1])\) with the condition (4.8), then the following condition is satisfied
Proof
To prove this lemma, we use the formula
using condition (4.8), we get
Applying Minkowski’s inequality and using condition (i), we get
This completes the proof. \(\square \)
4.3 The existence and uniqueness of the numerical solution
In this subsection, we will present the proof of the existence and uniqueness of the numerical solution of the system under study. This aim will be achieved through the following theorems:
Theorem 4.2
The integral equation
has an unique solution \(y_{n}(u,t)\) in \( L_{2}[0,1]\times C[0,T],\) under the condition:
Proof
Defining for each \(n>n_{0},\) the integral operator
where
Firstly, for the normality, we use Eq. (4.18) to get
Using condition (4.8), we get
then
where
Therefore, the integral operator V has a normality, which leads immediately after using the condition (iii) to the normality of the operator \(\overline{V}\).
Secondly, for the continuity, we assume the two functions \(y_{n1}(u,t),\;y_{n2}(u,t)\) satisfy Eq. (4.19), then
Using conditions (4.16) and (ii), we get
where
so that the last inequality becomes
with
Hence, \(\overline{V}\) is a contraction in the space \(L_{2}[0,1]\times C[0,T].\) Therefore, by Banach’s fixed point theorem, there is an unique fixed point \(y_{n}(u,t)\), which is the solution of the linear V–FIE (4.17). \(\square \)
Theorem 4.3
Under the condition (4.8), the unique solution \({y_{n}(u,t)}\) of integral Eq. (4.17) converges to the unique solution y(u, t) of integral Eq. (1.1).
Proof
From Eqs. (1.1) and (4.17), we have
Using properties of the norm and condition (ii), we get
Using condition (4.16), the last inequality becomes
The last inequality can be adapted as:
subsequently, if \(\Vert w-w_{n}\Vert \rightarrow 0\) as \(n\rightarrow \infty ,\) we have \(\Vert y-y_{n}\Vert \rightarrow 0\) as \(n\rightarrow \infty .\)
Hence, the proof is completed. \(\square \)
Theorem 4.4
From Eq. (4.14) and the degenerate kernel \(w_{n}(u,v),\) the linear algebraic system (4.15) has the unique solution \((\alpha _{j}^{1},\alpha _{j}^{2},\cdots ,\alpha _{j}^{n}),\) so that the Eq. (4.12) has the unique solution \(y_{i}^{n}(u)\).
Proof
We use the notations \((\alpha _{j}^{1},\alpha _{j}^{2},\cdots ,\alpha _{j}^{n}),\;(\beta _{j}^{1},\beta _{j}^{2},\cdots ,\beta _{j}^{n})\) as the two different solutions of (4.15) and from Eq. (4.14), we get
and
Using the properties of the norm, we obtain
where \(Q =\left\{ \sum _{m=0}^{j}|\mu _{m}|^{2}\right\} ^\frac{1}{2}\;\text {and}\; E=\left\{ \sum _{m=0}^{j}|\Phi _{j,m}|^{2}\right\} ^\frac{1}{2},\) which can be written in the vector form:
So the operator \(\overline{K_{j}}\) is continuous under the condition:
By Banach’s fixed point theorem, \(\overline{K_{j}}\) has an unique fixed point \(\overline{\alpha _{j}},\) that is, of course the unique solution of the system (4.15). It is obvious, for the only solution \((\alpha _{j}^{1},\alpha _{j}^{2},\dots ,\alpha _{j}^{n}),\) there is only solution \(y_{i}^{n}(u)\) of Eq. (4.12). \(\square \)
5 Application and numerical results
In this section, we try to apply some of the numerical methods to approximate the solution of the Volterra–Fredholm integral equation.
Example
Consider the following linear Volterra–Fredholm integral equation:
If \(|\gamma | < 16.075102\) (when \(T = 0.6\)), we find that the numerical solution quickly converges with the exact solution \(y(u,t)=u^{2}t^{2}\). We divide the interval \([0,T],\,0\le T<1,\) as \(0=t_{0}<t_{1}<t_{2}<t_{3}=T,\) where, \(t=t_{i},\,i=0,1,2,3,\) the linear Volterra–Fredholm integral Eq. (5.1) take the form:
where
In Table 1, we presented the absolute error \(|y(u,t_{i})-y_{i}(u)|,\,i=0,1,2,3\), using the introduced numerical method (degenerate kernel) with \(N=3\) in the interval [0, 0.6].
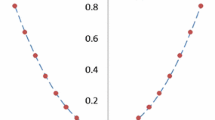
In addition, in Figs. 1, 2, 3, and 4, we presented a comparison between the exact solution and the approximate solution using the introduced numerical method with different values of \(t_{i},\,i=0,1,2,3\) with \(N=3\) in the interval [0, 1].

The exact solution \(y(u,t_{0})=u^{2} t_{0}^{2}\) and the approximate solution \(y_{0}(u)\)

The exact solution \(y(u,t_{1})=u^{2} t_{1}^{2}\) and the approximate solution \(y_{1}(u)\)

The exact solution \(y(u,t_{2})=u^{2} t_{2}^{2}\) and the approximate solution \(y_{2}(u)\)

The exact solution \(y(u,t_{3})=u^{2} t_{3}^{2}\) and the approximate solution \(y_{3}(u)\)
Example
Consider the following linear Volterra–Fredholm integral equation:
The numerical solution quickly converges with the exact solution \(y(u,t)=u^{2}e^{t}\) if \(|\gamma | < 5.451171\) (when \(T = 0.6\)). If we divide the interval \([0,T],0\le T<1,\) as \(0=t_{0}<t_{1}<t_{2}<t_{3}=T,\) where, \(t=t_{i},\,i=0,1,2,3,\) the linear Volterra–Fredholm integral Eq. (5.2) take the form:
where
and
In Table 2, we presented the absolute error \(|y(u,t_{i})-y_{i}(u)|,\,i=0,1,2,3\), using the introduced numerical method (degenerate kernel) with \(N=3\) in the interval [0, 0.6].

The exact solution \(y(u,t_{0})=u^{2} t_{0}\) and the approximate solution \(y_{0}(u)\)

The exact solution \(y(u,t_{1})=u^{2} t_{1}\) and the approximate solution \(y_{1}(u)\)

The exact solution \(y(u,t_{2})=u^{2} t_{2}\) and the approximate solution \(y_{2}(u)\)

The exact solution \(y(u,t_{3})=u^{2} t_{3}\) and the approximate solution \(y_{3}(u)\)
In addition, in Figs. 5, 6, 7, and 8, we presented a comparison between the exact solution and the approximate solution using the introduced numerical method with different values of \(t_{i},\,i=0,1,2,3\) with \(N=3\) in the interval [0, 1].
6 Conclusion and remarks
From the above results and discussion, the following may be concluded:
-
1.
Equation (1.1) has a unique solution y(u, t) in the space \( L_{2}[0,1]\times C^{2}[0,T]\), under some conditions.
-
2.
The mixed integral equation of the second kind, in time and position, after using quadratic method leads to a system of linear Fredholm integral equations of the second kind in position.
-
3.
The solution of the system of linear Fredholm integral equations is obtained using the degenerate kernel method.
-
4.
The error value increases when it gets closer to the ends points \(u = \pm 1\). It decreases at the middle when it gets closer to zero.
References
Abdou, M.A., Nasr, M.E., Abdel-Aty, M.A.: Study of the normality and continuity for the mixed integral equations with phase-lag term. Int. J. Math. Anal. 11, 787–799 (2017). https://doi.org/10.12988/ijma.2017.7798
Abdou, M.A., Nasr, M.E., Abdel-Aty, M.A.: A study of normality and continuity for mixed integral equations. J. fixed point theory appl. (2018). https://doi.org/10.1007/s11784-018-0490-0
Abdou, M.A., Raad, S.A., Alhazmi, S.E.: Fundamental contact problem and singular mixed integral equation. Life Sci. J. 11(9), 119–125 (2014)
AL-Jawary, M., Radhi, G., Ravnik, J.: Two efficient methods for solving Schlmilchs integral equation. Int. J. Intell. Comput. Cybern. 10(3), 287–309 (2017)
András, S.: Weakly singular Volterra and Fredholm-Volterra integral equations. Stud. Univ. Babes-Bolyai Math. 48(3), 147–155 (2003)
Atkinson, K.E.: The Numerical Solution of Integral Equation of the Second Kind. Cambridge Monographs on Applied and Computational Mathematics. Cambridge University Press, Cambridge (1997)
Boykov, I.V., Ventsel, E.S., Roudnev, V.A., Boykova, A.I.: An approximate solution of nonlinear hypersingular integral equations. Appl. Numer. Math. 86, 1–21 (2014)
Delves, L.M., Mohamed, J.L.: Computational Methods for Integral Equations. CUP Archive, New York (1988)
EL-Borai, M.M., Abdou, M.A., EL-Kojok, M.M.: On a discussion of nonlinear integral equation. J. KSIAM 10(2), 59–83 (2006)
Gu, Z., Guo, X., Sun, D.: Series expansion method for weakly singular Volterra integral equations. Appl. Numer. Math. 105, 112–123 (2016). https://doi.org/10.1016/j.apnum.2016.03.001
Golberg, M.A., Chen, C.S.: Discrete Projection Methods for Integral Equation. Computational Mechanics Publications, Madraid (1997)
Green, C.D.: Integral Equation Methods. CUP Archive, New York (1969)
Krein, M.G.: On a method for the effective solution of the inverse boundary problem. Dokl. Acad. Nauk. Ussr. 94(6), 129–142 (1954)
Kovalenko, E.V.: Some approximate methods for solving integral equations of mixed problems. Provl. Math. Mech. 53(1), 85–92 (1989). https://doi.org/10.1016/0021-8928(89)90138-X
Micula, S.: On some iterative numerical methods for a Volterra functional integral equation of the second kind. J. Fixed Point Theory Appl. 19(3), 1815–1824 (2017). https://doi.org/10.1007/s11784-016-0336-6
Micula, S.: An iterative numerical method for Fredholm-Volterra integral equations of the second kind. Appl. Math. Comput. 270, 935–942 (2015). https://doi.org/10.1016/j.amc.2015.08.110
Nasr, M.E., Jabbar, M.F.: An approximate solution for Volterra integral equations of the second kind in space with weight function. Int. J. Math. Anal. 11, 849–861 (2017)
Sizikov, V.S., Sidorov, D.N.: Generalized quadrature for solving singular integral equations of Abel type in application to infrared tomography. Appl. Numer. Math. 106, 69–78 (2016)
Sneddon, I.N., Lowengrub, M.: Crack Problem in the Classical Theory of Elasticity. wiley, Amsterdam (1969)
Yueshengxu, H.K.: Degenerate kernel method for Hammerstein equations. Math. Comput. 65(193), 141–148 (1991). https://doi.org/10.1090/S0025-5718-1991-1052097-9
Acknowledgements
We would like to thank Prof. Dr. M. A. Abdou, (Dep. of Maths. Faculty of Education, Alexandria University) and the anonymous reviewers for their constructive suggestions towards upgrading the quality of the manuscript.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Nasr, M.E., Abdel-Aty, M.A. Analytical discussion for the mixed integral equations. J. Fixed Point Theory Appl. 20, 115 (2018). https://doi.org/10.1007/s11784-018-0589-3
Published:
DOI: https://doi.org/10.1007/s11784-018-0589-3