
Abstract
Flexible needle systems showing multiple advantages in various medical scenarios, characterized by their flexibility, ease of operation, adaptable control and navigation capabilities. This paper presents a scientometric analysis of the research advancements in flexible needle systems. The paper reviews 498 articles with various perspectives from 1997 to 2023 and conducts a scientometric study including crucial institutions, journals, and article keywords. The analysis reveals that the knowledge domain of flexible needle systems is focused on signal processing, navigation, and control. Subsequently, a thorough examination of the current key research directions in the field of flexible needles is conducted, and an analysis of the challenges faced by this field is presented. The review also provides a comprehensive and integrated knowledge mind map to establish the flexible needle system’s information network. It offers valuable insights for researchers into future research directions and developments within the field of medical flexible needle systems in surgery.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Recently, the escalating incidence of various cancers, driven by factors such as the deterioration of living environments and heightened social pressures, has become a pressing concern [1,2,3]. Puncture has emerged as a pivotal method in clinical diagnosis and treatment, particularly in the context of percutaneous intervention surgery [4, 5]. This surgical procedure involves the guided insertion of medical instruments, such as puncture needles, into the targeted location of a patient’s body lesion using medical images. It encompasses activities like puncture biopsy, ablation surgery, and radioactive particle implantation to achieve therapeutic goals. Puncture surgery, characterized by its advantages of minimal trauma, rapid recovery, precise diagnosis, and reduced pain, has progressively found applications across various clinical treatment domains, representing a significant shift from traditional open surgery [6, 7]. Conventional puncture surgeries conventionally utilize rigid surgical instruments [8, 9]. However, on the one hand, the fixed nature of rigid instruments leads to a relatively inflexible pathway, making them prone to deviations during the puncture process. On the other hand, the larger diameter of rigid instruments can result in significant patient damage when the force interactions between the needle and tissue are substantial. To address the challenges associated with rigid surgical instruments, flexible needle puncture surgical instruments have been introduced [10,11,12].
Flexible needle systems are medical instruments with bending and flexible characteristics, showing multiple advantages in various applications. For example, brain surgery utilizes the flexible needle for brain puncture and brain tissue sampling[13]. Their softness allows the needle to adapt to complex neural anatomy, reducing damage to surrounding tissue. In addition, flexible needles can also be used for percutaneous interventional therapy, such as puncture, fluid extraction, injection of drugs or fillers, and guiding catheters or devices into the body for diagnosis or treatment[14]. In tumor treatment, flexible needles can achieve percutaneous tumor ablation or catheter-based radiotherapy. They can penetrate tissue and locate the tumor site for accurate and effective treatment. Furthermore, flexible needles play a guiding and operational role in endoscopic surgery. They can enter the body cavity through natural channels or small incisions and perform endoscopic surgical procedures. Due to their ability to adapt to complex anatomy, accurately traverse tissue and reach the target area to provide accurate treatment or diagnostic results, the use of flexible needles can not only reduce damage and trauma to surrounding tissue, but also alleviate pain and discomfort experienced by patients [15, 16]. At the same time, due to its flexibility, ease of operation, and the advantages of control and navigation according to needs, it can play a role in different parts and anatomical structures. It is widely used in various medical scenarios.
Since Dr. DiMaio introduced the concept of flexible needles in 2003 [17], researchers worldwide have engaged in relevant design and exploration. In 2005, Webster investigated oblique-tip flexible needles [18], wherein a flexible needle with an obliquely angled tip, when traversing soft tissue, exhibits bending due to the asymmetry of the tip. This, in turn, enhances targeting accuracy. In 2007, Minhas built upon those above oblique-tip flexible needles and explored new control methods [19]. Unlike Webster’s intermittent rotational insertion, Minhas controlled the needle’s movement by continuously rotating it during insertion, with the curvature of the oblique-tip needle depending on the needle’s stiffness and the angle of the tip. Subsequently, research institutions and scholars worldwide conducted pertinent studies addressing the challenges and focal points of robot-assisted navigation for biopsy systems.
This paper aims to offer a comprehensive exploration through integrated knowledge mapping and scientometric analysis of flexible needle systems, drawing upon articles retrieved from the Web of Science spanning the period from 1997 to 2023. Dynamic citation analysis visualization technology has been employed to illustrate the evolutionary trajectory of the knowledge area and highlight its pioneering concepts. A holistic understanding of the flexible needle domain is articulated through a mind-mapping approach, encompassing publications, document co-citations, institutional affiliations, keyword co-occurrences, and keyword cluster analysis. Additionally, the paper delineates crucial avenues for future research in this domain.

Research framework
2 Scientometric analysis
This section presents an overview of scientometrics and establishes a comprehensive framework for conducting scientometric analyses on flexible needle systems. We elaborate on the information retrieval methodology and undertake a thorough scientometric investigation of flexible needle systems through a systematic knowledge review, employing a visual clustering approach.
2.1 Concept and framework
Scientometrics has been crucial to applied mathematical statistics since the early 1960s. The scientometric analysis is mainly focused on visualizing emerging trends and transient patterns. It is used to realize visualizations based on network modeling to help researchers perceive the intellectual landscape of a knowledge domain.
This section aims to unveil the evolutionary patterns of knowledge networks, encompassing the configuration and temporal characteristics of scientific discoveries with potential significance in the field of flexible needle systems through the application of scientometric analysis. Figure 1 delineates our comprehensive framework for visually researching published articles on flexible needle systems. We categorize our scientometric techniques into five aspects:
-
Journals To acquire insights into prominent academic journals.
-
Co-occurrence To construct a co-occurrence network encompassing countries, regions, and institutions.
-
Co-citation To depict a network of document and critical paper co-citations.
-
Keyword co-occurrence To showcase a high-frequency keyword network and a time zone view.
-
Keyword cluster analysis To extract the primary knowledge domains.
Finally, we delve into evolutionary trends and existing knowledge domains and construct a comprehensive knowledge mind map.
2.2 Information retrieval
We utilized the Web of Science Core Collection database to retrieve research information within the domain of flexible needle systems. WoS stands out as the most extensive and integrated academic information retrieval platform, encompassing various disciplines such as SCII, SSCE, CPCI-SSH, CPCI-S, BCI-SSH, BCI-S, and more [22]. The advanced search tool was employed to identify articles within the target field, employing the search terms “(TS=(Flexible needles) OR TS=(medical needles) OR TS=(steerable needles)) AND (TS=(Path planning) OR TS=(Control) OR TS=(Navigation) OR TS=(Location)).” The specified time range for retrieval spans from 1997.01.01 to 2023.11.30. Document categories were limited to journal articles and conference proceedings papers. 498 representative articles were collected and organized chronologically by the year of publication. The annual publication and total citation volume, as depicted in Fig. 2, reveal a noticeable increase in publication output since 2005, indicating a growing significance of the field. In 2019, there was a deviation from the previous upward trend attributed to the impact of the COVID-19 pandemic. Many researchers in this field are professionals in the healthcare industry, and the pandemic had substantial effects. However, starting from 2021, this trend has seen some alleviation. On the other hand, the cumulative citation count for publications continues to rise, substantiating the sustained attention and interest in the field.

Core flexible needle system literature statistics
2.3 Journals
The analysis encompasses a dataset comprising 278 articles and 220 proceedings papers. As shown in Fig. S1, the top 10 publications in flexible needle systems collectively contribute to 39.479% of the entire corpus. Notably, the periodical IEEE Robotics and Automation Letters emerges as a prominent contributor, presenting 37 articles in the flexible needle systems literature. Following closely is IEEE Transactions on Biomedical Engineering with 26 articles, and subsequently, IEEE TRANSACTIONS ON ROBOTICS with 16 articles. The above journals are influential platforms, showcasing numerous exceptional contributions to this specialized field. Regarding conference papers, The IEEE International Conference on Robotics and Automation (ICRA) stands out as the most prolific venue for disseminating research on flexible needle systems. This conference, a flagship event in the robotics industry, holds unparalleled international influence. Organized by the IEEE Robotics and Automation Society (RAS), ICRA is renowned for its high submission standards and consistently delivers articles of exceptional quality. Furthermore, IEEE INTERNATIONAL CONFERENCE ON INTELLIGENT ROBOTS AND SYSTEMS (IROS), contributing 12 conference papers, is also organized by RAS and maintains a substantial scale. While slightly overshadowed by ICRA, IROS is a distinguished conference. Such publications are likely among the most influential within the WOS field of flexible needle systems. A meticulous examination of the journal list distinctly reveals that research on flexible needle systems traverses diverse domains, with a pronounced emphasis on the intersection of medicine and robotics.
2.4 Regions and Institutions
Figure S2 illustrates the structural configuration of the research network on flexible needle systems across institutions and countries/regions, featuring 28 nodes and 35 links denoting collaborations among authors from different institutions or countries. The node size corresponds to the quantity of contributions. The USA (215 articles, 43.2%), China (98 articles, 19.7%), Canada (55 articles, 11%), England (42 articles, 8.4%), and France/Netherlands (29 articles, 5.8%) made major contributions from 1997 to 2023. It is worth noting that such countries and regions often have multiple commercialized robotic surgical systems for needle-based procedures. Examples include the Renaissance needle-based robotic system from Mazor Robotics in the USA, the Pathfinder needle-based robotic system from Pathfinder in the USA, the NeuroMate needle-based robotic system from Renishaw in the United Kingdom, and the Rosa needle-based robotic system from Medtech in France.
Several institutions have produced flexible needle systems research. They include JOHNS HOPKINS UNIVERSITY, with 38 articles since 2004; University of California System, with 24 articles since 2005; Imperial College London, with 19 articles since 2011; University of California Berkeley, with 19 articles since 2005; Chinese Academy of Sciences, with 17 articles, as well as University of North Carolina and University of North Carolina Chapel Hill, with 17 articles; Among them, universities from the USA make up the majority, demonstrating their outstanding strength and contribution.
Numerous institutions have actively contributed to the research on flexible needle systems. Table S1 provides an overview of research institutions that have published more than 10 papers in this domain. Notably, Johns Hopkins University has been a prolific contributor with 38 articles since 2004. The University of California System has also significantly contributed, producing 24 articles since 2005. Imperial College London, with 19 articles since 2011, and the University of California Berkeley, with 19 articles since 2005, have demonstrated substantial engagement in this research area.The Chinese Academy of Sciences stands out as a prominent research institution in China, contributing 17 articles and holding the highest number of published papers in this field among Chinese institutions. Moreover, the collaborative efforts of the University of North Carolina and the University of North Carolina Chapel Hill have resulted in 17 articles showcasing their joint contribution to this research area. Remarkably, cross-institutional collaboration predominantly occurs within a single country and is infrequently observed across international borders. Notably, most of the above influential institutions are based in the USA, underscoring their exceptional strength and substantial contributions to advancing knowledge in the field of flexible needle systems.
2.5 Document co-citation
The citation network is illustrated in Fig. S3, comprising 284 nodes and 525 links, encompassing references found in the 498 articles analyzed in this study. Each node signifies an individual document, and the links represent co-citation relationships among these documents [23]. The colors assigned to the links correspond to distinct periods. Examination of the network reveals a prevalence of green and red links, indicating that document co-citation predominantly occurs from 2005 to 2008 and from 2018 to 2021. The size of each node is proportionate to the frequency with which the paper is cited. Table S2 outlines the top 10 most cited articles, each acknowledged with more than 20 citations, suggesting a significant contribution to the flexible needle systems research field.
The document co-citation analysis evaluated all the article references. Webster et al. [18] achieved the highest citation frequency (38). Their proposal revolves around utilizing nonholonomic kinematics, control, and path planning to steer a specially designed needle through tissue, precisely reaching a specified 3D target. This marks an initial step toward active needle steering, involving the design and experimental validation of a nonholonomic model for steering flexible needles with bevel tips. In the work by Misra et al. [24], the investigation centers on the mechanics-based modeling of robotic needle steering. The aim is to predict and optimize needle behavior based on fundamental mechanical and geometrical properties, particularly in interacting with soft tissue. Papers such as [25,26,27], and [28] primarily concentrate on the development of motion planning and control strategies. They focus on guiding flexible needles through intricate 3D environments, encompassing obstacle avoidance and reaching specific targets. Another research avenue is presented by works like [29] and [30], which involve developing image-guided control systems for steering flexible needles. This encompasses predicting needle deflection and integrating real-time fluoroscopic guidance to achieve precise and controlled needle insertion, thereby avoiding obstacles and hitting predetermined targets. In innovative approaches, papers like [31] and [32] contribute by introducing inventive needle tip designs to enhance steer ability while minimizing tissue damage. Additionally, these works explore advanced 3D motion planning techniques, particularly for bevel-tip needles, within environments presenting obstacles. The aforementioned four thematic groups encapsulate the primary research directions within the flexible needle systems literature. Group 1 focuses on motion planning and control, Group 2 delves into mechanics-based modeling, Group 3 emphasizes image-guided systems, and Group 4 explores advanced needle tip design and 3D motion planning techniques. Each group significantly contributes to advancing the accuracy and efficiency of flexible needle systems in medical and robotic applications.
Notably, despite Chinese institutions contributing 9.95% of the articles in Fig. S2, none of their works are among the most cited in Table S2. The development of flexible needle systems research in China is progressing rapidly, and this outcome, to some extent, reflects an imbalance between practical applications and research in China. Certainly, this is also directly related to the literature database we have selected, as there are significant differences in citation frequencies between different databases, such as WoS and Google Scholar. Specifically, Webster et al. [18] has been cited 859 times on Google Scholar. However, in the database studied in this paper, it has only been cited 38 times; the latter considers only 498 articles and their references.
2.6 Keyword co-occurrence
This article conducts a crucial analysis by examining keyword co-occurrence to elucidate the fundamental themes and core content within flexible needle systems research. This analysis serves to discern predominant research trends [33]. The resulting keyword co-occurrence network, illustrated in Fig. 3, encompasses 118 nodes and 191 links, highlighting keywords that occur more than three times across the 498 articles. The size of network nodes corresponds to the frequency of each keyword occurrence, providing a visual representation of their significance in the research landscape.
The foremost keyword is medical robotics, which occurs 49 times. Similar terms, such as medical robots and systems(24 occurrences), surgical robotics(23 occurrences) and robot(17 occurrences), can be broadly categorized as medical robotics. Since flexible needle systems represent a subset of medical robotics, their emergence is a tangible manifestation of ongoing research in the intersection of robotics and the medical domain.
Several pertinent keywords emerge prominently concerning the research topic of flexible needle systems. These include steerable needles(39 times), needle steering(31 times), steerable needle(23 times), flexible needle(14 times), steerable catheters(10 times), active needle(6 times), such keywords share similar meanings and serve as varied expressions for the flexible needles, which constitute the focal point of investigation in this article.
Additional high-frequency keywords denote specific subtopics within the study of flexible needles. For instance, path planning is mentioned 20 times, guidance appears 11 times,motion is cited 15 times, motion planning is referenced 6 times. The above keywords are associated with research on path planning for flexible needles. Existing research outcomes have demonstrated that path planning is an essential step in flexible needle puncture surgery, significantly enhancing surgical precision, minimizing patient discomfort, and offering valuable guidance throughout the surgical procedure [18, 34]. Keywords image registration appeared 13 times, 3d environments appeared 14 times, 3d appeared 7 times, algorithms appeared 7 times, and model appeared 11 times signify the research focus on image registration and control algorithms for flexible needles.

Keywords co-occurrence network for 1997 to 2023
2.7 Cluster analysis
Furthermore, citation clustering is employed to scrutinize the underlying structure and disciplines within the realm of flexible needle systems[35]. Literature citation clustering, commonly called cluster analysis, is a potent data mining tool for identifying themes, contents, and the relationships among articles within a specific field[36, 37]. This methodology categorizes a substantial volume of literature data, simplifying groupings through automated tagging functions. The log-likelihood ratio (LLR) is the principal classification statistic based on the keywords extracted from 498 papers. Figure 4 illustrates ten prominent clusters, labeled from zero to nine, where the cluster size decreases with the ascending ID number. Table S3 provides detailed information on cluster-ID, label, cluster size, silhouette, and alternative labels. In this instance, the modularity is Q=0.8118, signifying the significance of the keyword cluster analysis results. The weighted mean silhouette is S=0.9212, indicating distinct knowledge clustering characteristics within the relevant literature; this suggests that the research field has garnered significant attention and recognition.
Subsequently, we conducted an analysis based on silhouette scores to evaluate the highlighted clusters presented in Table S3. Silhouette scores, spanning from 0.823 to 1, are proportionate to the relationship between each cluster and alternative labels within it. Cluster 0 (steerable needles), being the largest, has found widespread application in papers related to flexible needles. The alternative labels within this cluster include steerable needles, medical devices, robotic assistance, needle insertion, medical robots, and similar labels are also found in Cluster 7 (needle steering). Additionally, Cluster 1 (surgical robotics) and Cluster 6 (medical robotics) are interrelated clusters, sharing many alternative labels with similar meanings. It can be observed that the flexible needle system is a multidisciplinary theoretical and applied research area that spans medicine, control theory, mechanical engineering, and electronic information engineering. With the advancement of robotics-related technologies and increasing attention to medical technology, medical robots are gradually evolving toward intelligence and flexibility. Clusters 2 (Mediastinum) and 5 (Prostate Cancer) are associated with the application areas of flexible needles, such as prostate cancer, liver cancer, and others. Numerous scholarly works underscore the substantial scientific significance that the research on puncture needles is of great scientific significance in the field of superficial large organs such as the liver and lungs, especially in the field of deep small organs such as the prostate, which require high accuracy in signal processing and puncture [38,39,40,41]. Clusters 3 (needle deflection), 4 (mutual information), and 8 (path planning) represent key research topics in flexible needles, which are related to aspects like flexible needles image registration, path planning, and trajectory tracking control. Cluster 9 (Basic network principles) is also a crucial research topic, signifying the increasing application of neural network-based methods in various fields of flexible needle research.
Figure S4 presents a time zone map illustrating keywords appearing five or more times. It is evident from the graph that around 2005, keywords such as surgical robotics, needle steering and needle deflection were already high-frequency terms, and their persistent use as keywords indicates the ongoing nature of research in this field. From 2010 to 2015, high-frequency keywords shifted to steerable needles, path planning and flexible needles. During this period, various research directions experienced notable developments. Between 2015 and 2018, new topics emerged, reflected in keywords related to computer vision, machine learning, and neural networks. With the rapid advancement of computer technology and artificial intelligence, these technologies have been applied across various technical aspects of flexible needle research, and the associated keywords have become more prevalent over the past five years.

Keywords cluster analysis for 1997 to 2023
3 Existing research domains
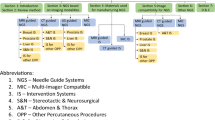
Based on the keyword co-occurrence network and cluster analysis graph, we systematically categorize the domains of knowledge in flexible needle systems through manual classification. Presently, research on flexible needles can be broadly categorized into four main directions: needle systems signal processing, multi-modal medical image registration, needle insertion path planning, needle steering control and system integration [42,43,44].
3.1 Needle systems signal processing
In the research related to flexible needles, signal processing serves as the foundation of navigation, path planning, and control. Enhancements in signal processing methodologies can not only augment surgical precision, but also significantly refine the surgical procedure itself [18]. Considering the signal origins, they can be categorized into three domains: user input signals, feedback signals from front-end sensors, and signals derived from images and videos. Subsequently, pertinent instructions are generated based on the outcomes of signal processing. At the same time, signal processing as the basis for establishing the system model, it is necessary to put forward more stringent requirements on the signal processing method [13]. According to the signal source that the flexible needle needs to process, the direction is roughly divided into three categories: User input signals, Front-end sensor feedback signals, Image and video signals and finally according to the signal processing results to generate the relevant instructions.
User input signals are often the key to guiding the flexible needle to locate the problem precisely during surgery, which has strong applicability in medical robots. Because the movements of flexible needles are similar to those of medical robots, their movements are pre-programmed, remote-controlled by joysticks, and partially autonomous [45,46,47]. However, as technology has advanced, the flexibility of pre-programmed movements cannot be adapted to the changing clinical environment, and its existence has been gradually replaced by remote surgical control known by the physician. Although the mode of manipulation is not the same as before, the input of user signals remains an essential and indispensable ingredient in surgery. According to Yulin Xu et al. [48], the processing of user input signals during remote interaction needs to take these aspects into consideration. Signal amplification: The user input signal is amplified to ensure that the system is sufficiently sensitive to small user actions. Filter design: According to the actual application needs, suitable filters are designed to filter out unwanted frequency components to ensure that only signals related to the manipulation are transmitted and to improve the stability of the system. Motion decoding: Decode the user input into motion, deformation or other control parameters of the flexible needle. Furthermore, through mathematical modeling and algorithms, user requirements are transformed into specific control commands. Adaptive control: An adaptive control strategy is adopted to adjust the response of the flexible needle according to the user’s operation mode and characteristics.
Images and video signals are the “eyes” that convey information during the manipulation of the flexible needle. By combining an imaging system, which is often used in standard surgical tasks, with a flexible needle, the ability to track the needle position and convey navigational cues can go a long way toward avoiding failures due to inaccurate needle penetration, a concern that is present in minimally invasive surgical (MIS) [49], which is one of the most common procedures for remote manipulation, and also has concerns like this [50]. Therefore, the surgeon needs to be able to observe the needle’s direction of advancement and the environment in real time while manipulating the needle to perform the procedure. The Da Vinci Si surgical system has used visual and auditory feedback in commercial robotic surgical systems [16]. According to Erp et al., Kuchenbecker et al., and other’s research [51, 52], there are various ways to draw and capture images in order to obtain as much information as possible from the images; the associated signal processing becomes very important: Image preprocessing: adjusting greyscaling, denoising, contrast, etc., to improve the quality of the image and to adapt it to the needs of subsequent processing algorithms. Feature extraction: extracting features such as edges, corner points, textures, etc., for target recognition, localization, and navigation. Image alignment: Image alignment is required at multiple time points or between different imaging modalities to ensure consistency. Target Detection and Segmentation: Identifying and localizing specific targets in an image. Visual odometry: Motion estimation using image sequences. Image fusion: If multiple imaging devices are on board, information from these devices needs to be integrated to provide more comprehensive scene awareness. Transmission and storage: Efficient image data transmission and storage mechanisms can ensure real-time performance and record keeping [53].
In addition to user input signals and image-video signals, the control process of flexible needles also requires accurate data acquisition of various parameters of the real-time environment and the formation of real-time feedback through modeling and algorithms. For example, biosensors commonly used in medicine, including electrocardiogram (ECG), electromyogram (EMG), and electroencephalogram (EEG), are used as biosensors by using medical electrodes to capture these biosignals, which are known for their weak and unstable characteristics [54]. Flexible needles have an essential role in therapy because their soft nature allows for accurate insertion into soft, inhomogeneous tissue. Deformation sensors enable precise control of deflection during surgery [55]. The effect of needle geometry on needle bending has been demonstrated by Okamura et al. [56], and an optimization algorithm for predicting needle deflection through a mechanical model has been proposed by Abolhassani et al. [57]. In their study, they assisted the manipulation by acquiring and processing signals such as moments, deformations, and bio-information [49]. The above studies demonstrate the critical role of front-end sensor signal processing, which includes signal filtering and amplification calibration similar to user input signals, as well as feature extraction and information fusion in the same way as image signal processing, State Estimation: Estimation of the state of the flexible needle, e.g., position, attitude, shape. Feedback control: Implementing feedback control using sensor feedback signals to adjust the motion or shape of the flexible needle to ensure that it performs the task as intended. Data Sampling and Processing: If the signal output from the sensor is an analog signal, it needs to be converted into a digital signal by analog-to-digital conversion (A/D conversion) and then further processed as a digital signal [58, 59].
3.2 Multi-modal medical image registration
Image registration can be conceptualized as a sub-type within signal processing [60]. Primarily, image registration entails the manipulation of spatial or temporal correlations existing among diverse images with the aim of aligning and harmonizing them. Medical image registration refers to the pursuit of a spatial transformation relationship for floating images, ensuring spatial consistency of anatomical points with diagnostic significance in both reference and floating images [61, 62]. Currently, multi-modal image registration methods mainly comprise model-based registration, feature-based registration, grayscale-based registration, and deep learning-based registration [63].
Model-based registration methods initially model the complex deformation of small organs and then register it with the segmented small organs in the image [64,65,66]. To achieve deformation modeling of small organs, different scholars have proposed three types of methods: biomechanical modeling method, statistical modeling method, and hybrid modeling method. Biomechanical modeling methods primarily utilize finite element methods, combined with elastic material models or nonlinear models [67], to achieve deformation modeling of small organs. Elastic material models are only suitable for small deformation modeling, while nonlinear models incur high computational costs and require accurate physical parameters such as small organ elasticity coefficients, Poisson’s ratio, shear modulus, which vary among individuals and are difficult to measure clinically [68,69,70]. Statistical modeling methods establish statistical shape or deformation models through a certain quantity of training samples. For example, in prostate tissue modeling, Hu et al. [71,72,73] determined its biomechanical parameter range through clinical experiments combined with finite element modeling. However, using random sampling to obtain specific parameter values has limitations, as the biomechanical parameter range determined by experimental methods is difficult to accurately cover different patients, and values obtained through random sampling are difficult to match specific patient conditions due to individual differences. Hybrid modeling methods attempt to combine the advantages of above two methods to obtain a statistically specific deformation model, ensuring the practicality of the modeling. Wang et al. [74, 75] combined prostate MR image segmentation and ultrasound elastography to create a biomechanical statistical model. Additionally, principal component analysis methods cannot effectively handle nonlinear biomechanical statistical models.
Feature-based registration methods begin by detecting feature points in the floating image using methods such as corner detection, calculating relevant features [79,80,81]. Subsequently, point correspondences are established based on the features of these points, and a deformation field is derived from the point correspondences to achieve image registration. Chen et al. proposed a multi-modal registration method for MRI-CT images based on the scale-invariant feature transform (SIFT) feature [82]. This method unifies the SIFT feature gradient direction to the range of 0-\(\pi \), adapting the SIFT feature to multi-modal grayscale variations. The feature’s main orientation is calculated based on the gradient vector, thus mitigating the impact of image rotation on feature matching. Anis et al. introduced an image registration method based on the normalized gradient field [83]. This feature, based on image gradients, overcomes grayscale differences between multi-modal images. Zhu et al. utilized Zernike moments based on grayscale frequency domain information as a feature representation [84]. Since this feature is not directly based on grayscale to describe features, it is suitable for registering multi-modal MR images with inconsistent grayscale. Heinrich et al. proposed a series of feature representation methods based on neighborhood information for multi-modal image registration. These methods include the proposal of non-local shape descriptors, modality-independent neighborhood descriptors MIND [85, 86], self-similar texture SSC [87], and image sparse representation [88]. While the aforementioned methods may adapt to grayscale differences between multi-modal images, they are unable to effectively represent complex feature information such as rotation and scale changes in the images. Kasiri et al. proposed a T1W-T2W image block matching method [89]. This method searches for matching blocks in the reference image based on pixel blocks, generating a registration deformation field according to the correspondence between blocks.
In grayscale-based registration methods, mutual information (MI) methods are predominant, and research in this area primarily focuses on entropy computation, optimization methods, and algorithm acceleration. In the realm of optimization research, Yang et al. proposed a method that combines finite storage boundary methods with cat swarm optimization [90]. Abdel et al. introduced the particle swarm optimization algorithm into the MI registration method [91], while Shen et al. proposed a method combining cuckoo optimization algorithm with traditional optimization methods [92]. Chen et al. improved the robustness of the method by combining a multi-resolution strategy with Powell optimization method [93], and Klein et al. presented a multi-resolution image registration method based on a pyramid structure [94, 95]. In entropy computation research, Jonghye et al. introduced an MI weight computation method based on Harris detection results [96], and Rivaz et al. employed the stochastic gradient descent method to avoid the influence of local extremum [97]. Razlighi et al. incorporated neighborhood spatial information into MI, increasing the weight of the joint entropy term for neighboring pixels, thereby enhancing the robustness of the method [98]. Lou et al. utilized Bhattacharyya distance as a measure of registration similarity [99], avoiding the impact of local extremum. Loeckx et al. introduced a conditional MI computation method based on local joint histograms [100]. Wang et al. replaced probability density with probability distribution to calculate information entropy, proposing a cross-entropy accumulation method [101] to improve the stability of the registration method. Chen et al. presented generalized partial volume estimation [102, 103] to address the MI local extremum problem caused by entropy interpolation. Studhdme et al. introduced normalized mutual information [104] to reduce the impact of registration overlap changes on the distribution of mutual information.
In the domain of medical image registration, deep learning-based registration approaches primarily fall into two categories. The first category involves supervised learning methods based on deformation fields [109, 110]. These methods utilize convolutional neural networks (CNNs) and similar models to estimate real-time deformations, either through simulating deformations or using deformations obtained from traditional registration methods as labels. The second category comprises unsupervised learning methods [111], which directly learn the similarity between the registration result and the reference image. This allows for image registration and fusion without the need for deformation field ground truth. Balakrishnan et al. proposed the Morph method [112], utilizing dissimilarity between the registered and reference images as a loss function to reconstruct the registration result using spatial transformation layers. Building upon this, Boah Kim et al. introduced the CycleMorph method [113], incorporating implicit regularization based on cycle consistency to maintain topological structures during the deformation process, thereby enhancing registration performance. Additionally, Fan et al. and Duan et al. presented registration methods based on generative adversarial networks (GANs) [114, 115]. Such approaches leverage GANs to generate deformation fields, distort floating images, obtain registration results, and subsequently employ a discriminator network to assess the alignment of the two images.
3.3 Needle insertion path planning
Existing findings have unequivocally demonstrated that trajectory planning is an indispensable process in flexible needle puncture surgery. It significantly enhances the precision of surgical procedures, thereby reducing patient distress and providing substantial guidance for the surgical process [116,117,118]. Since the inception of the concept of flexible needles and its analysis by Webster et al. [18], current puncture path planning can be broadly categorized into three classes based on algorithms: numerical methods, search methods [119], and inverse methods [120].
Numerical methods involve optimizing paths through a series of numerical computations, typically by calculating the extrema of a defined objective function to determine the optimal trajectory. These methods can be further categorized into probabilistic methods and objective function methods [121, 122]. Probabilistic methods were introduced by Alterovitz et al. [120], based on a motion model similar to the Unicycle model trajectory, they considered the uncertainties in the needle puncture process and computed the optimal deflection point to guide the needle most likely to reach the target location. Through the “MDP process,” they identified the needle’s path strategy to navigate obstacles in 2D space [123]. Scholars like Park et al. introduced noise to simulate uncertain tissue conditions, they utilized probability density functions to calculate the reachable probability of the needle tip, thus planning the trajectory of the needle. Initially applicable to obstacle-free three-dimensional environments, the algorithm was later extended to three-dimensional spaces with obstacles [27]. Objective function methods, also proposed by Alterovitz et al., utilized a finite element model. They aimed to establish a nonlinear objective function based on criteria such as the shortest puncture path, meeting puncture accuracy, and avoiding obstacles [26].
Search methods involve using AI search techniques to find trajectory nodes that meet the specified requirements, thereby forming feasible paths [125,126,127]. In 2010, Patil et al. conducted a study on an RRT algorithm for rapid motion planning in complex three-dimensional environments. The research relaxed constraints such as curvature limitations, using a bicycle model as a reference to achieve flexible needle path planning. This improvement led to enhanced planning speed and applicability in intricate three-dimensional environments [128]. In 2013, Moreira et al. segmented the flexible needle into multiple sub-paths, with each sub-path following arc curvature and being pieced together through segmented fitting. This method synthesized the needle’s trajectory, enabling flexible needle movement through target points in non-uniform media while avoiding moving obstacles [129]. In 2015, Sun designed a motion planning algorithm based on the Rapidly-exploring Random Tree (RRT) algorithm, incorporating a high-frequency replanning strategy during motion. This approach involved executing high-frequency path planning for the next action while implementing the optimal path from the previous cycle [130]. Xiong et al. in their 2015 study on the rapidly exploring random tree algorithm, accelerated the search speed, making it easier to identify the optimal path for probe insertion [131]. Tsumura focused on preoperative planning to reduce the flexibility hindrance caused by multilayered tissues [132].
Inverse methods involve employing kinematic inverse analysis to calculate effective trajectories from the needle insertion position to the target location [133,134,135]. However, it is crucial to note that the paths obtained through this method may not necessarily represent the optimal trajectory and may even lead to situations where the path cannot be computed [136, 137]. Duindam et al. were the first to propose the use of inverse methods for calculating three-dimensional S-shaped trajectories [138].
3.4 Needle steering control and system integration
The needle insertion control fundamentally constitutes a constrained nonlinear control problem, and the effectiveness of the control significantly impacts the outcomes of needle-based treatment [139, 140]. Current challenges in the research on needle steering control include how to design observers and controllers based on the characteristics of medical images, and how to guide the flexible needles along a preplanned trajectory [140,141,142].
To manage the distance of the needle tip departing from the puncture plane, Kallem et al. [143, 144] proposed a needle steering feedback control scheme. They linearized the nonholonomic kinematic equations through state transformation and employed a state observer to estimate individual motion state variables. Lapouge [145] proposed a puncture control algorithm based on Kalman filter for curvature estimation. Other advanced nonlinear control algorithms such as sliding mode control [146], adaptive control [147], image-based sliding mode control [148], backstepping control [149], and geometric control [150] have been successively applied to the control process of flexible needle puncture, demonstrating good performance through simulations or experiments.
In the realm of system integration solutions for flexible needles system, numerous research institutions have developed a series of robotic prototypes based on different principles [151,152,153]. Starting in 2012, Okayama University in Japan embarked on the design of a teleoperated puncture robot that enables quasi-real-time navigation through CT perspective images [154]. Austria has been engaged in the study of the B-Rob puncture robot since the early 20th century [155]. Since 2008, Johns Hopkins University has been instrumental in developing multiple robotic systems for prostate puncture surgery [156, 157]. The CT-Bot robot, developed in France, weighs a mere 3 kg and boasts CT compatibility, making it suitable for pulmonary punctures guided by CT[158]. Beihang University introduced the Remebot, a neurosurgical stereotactic surgical robot designed for procedures such as biopsy, aspiration, ablation, implantation, and radiotherapy. It obtained CFDA certification in 2018 [161]. Collaboratively developed by Beijing Institute of Technology and the 301st Hospital in 2010, a robotic-assisted puncture system was tailored for microwave ablation surgery targeting liver tumors [162]. In 2011, Harbin Institute of Technology devised a real-time three-dimensional ultrasound-guided puncture robot [163]. Tianjin University, in both 2013 and 2017, pioneered prostate puncture robots guided by MRI and CT-guided puncture robots [164, 165], achieving successful experimental applications.
4 Challenges
Based on the analysis of the existing research areas in the previous sections, we further summarize the potential challenges of flexible needle systems, including the mathematical theories for multi-modal medical image registration, theoretical foundations for hybrid systems modeling and trajectory planning, the integration of nonlinear robust control systems for puncture robots and reliability optimization. To comprehensively understand the concepts and research challenges within flexible needle systems, this section presents an in-depth knowledge mind map, as shown in Fig. S5.
5 Conclusion and outlooks
The article presents a scientometric analysis of advancements in flexible needle systems research. Through a comprehensive review of 498 articles spanning from 1997 to 2023 and incorporating diverse perspectives, we conduct a scientometric study that provided a comprehensive analysis of the flexible needle system, including publications, authors/institutions, keyword co-occurrence, clustering, and time zone maps. Subsequently, the knowledge domains related to flexible needle systems are categorized into three main areas: multi-modal medical image registration during the puncture process, methods for robot-assisted puncture path planning, and the control of flexible needles and system integration. Furthermore, the paper summarizes the emerging research directions and challenges. The analysis yields an integrated and cohesive knowledge mind map, contributing to the information network of flexible needle systems and offering valuable insights into prospective research directions and advancements for researchers engaged in the realm of flexible needle systems.
Availability of data and materials
Not applicable. No datasets were generated or analyzed during the current study.
References
Siegel, R.L., Miller, K.D., Jemal, A.: Cancer statistics, 2018. CA: Cancer J. Clin. 68(1), 7–30 (2018)
Ferlay, J., Soerjomataram, I., Dikshit, R., Eser, S., Mathers, C., Rebelo, M., Parkin, D.M., Forman, D., Bray, F.: Cancer incidence and mortality worldwide: sources, methods and major patterns in Globocan 2012. Int. J. Cancer 136(5), 359–386 (2015)
Jiang, W., Wu, D., Dong, W., Ding, J., Ye, Z., Zeng, P., Gao, Y.: Design and validation of a non-parasitic 2r1t parallel hand-held prostate biopsy robot with remote center of motion. J. Mech. Robot. 16(5), 051009 (2024)
Deb, S., Wijeysundera, H.C., Ko, D.T., Tsubota, H., Hill, S., Fremes, S.E.: Coronary artery bypass graft surgery vs percutaneous interventions in coronary revascularization: a systematic review. JAMA 310(19), 2086–2095 (2013)
Bravata, D.M., Gienger, A.L., McDonald, K.M., Sundaram, V., Perez, M.V., Varghese, R., Kapoor, J.R., Ardehali, R., Owens, D.K., Hlatky, M.A.: Systematic review: the comparative effectiveness of percutaneous coronary interventions and coronary artery bypass graft surgery. Ann. Intern. Med. 147(10), 703–716 (2007)
Kin, C., Snyder, K., Kiran, R.P., Remzi, F.H., Vogel, J.D.: Accidental puncture or laceration in colorectal surgery: a quality indicator or a complexity measure? Diseases Colon Rectum 56(2), 219–225 (2013)
Sandor, J., Ballagi, F., Nagy, A., Rákóczi, I.: A needle-puncture that helped to change the world of surgery. Surg. Endosc. 14(2), 201 (2000)
Robinson, S.R., Baird, R., Le, T., Wormald, P.J.: The incidence of complications after canine fossa puncture performed during endoscopic sinus surgery. Am. J. Rhinol. 19(2), 203–206 (2005)
Fu, C., Wang, N., Chen, B., Wang, P., Chen, H., Liu, W., Liu, L.: Surgical management of moderate basal ganglia intracerebral hemorrhage: comparison of safety and efficacy of endoscopic surgery, minimally invasive puncture and drainage, and craniotomy. World Neurosurg. 122, 995–1001 (2019)
Maria Joseph, F., Kumar, M., Hutapea, P., Dicker, A., Yu, Y., Podder, T.: Development of self-actuating flexible needle system for surgical procedures. J. Med. Devices 9(2), 020945 (2015)
Goksel, O., Dehghan, E., Salcudean, S.E.: Modeling and simulation of flexible needles. Med. Eng. Phys. 31(9), 1069–1078 (2009)
Engh, J.A., Podnar, G., Khoo, S.Y., Riviere, C.: Flexible needle steering system for percutaneous access to deep zones of the brain. In: Proceedings of the IEEE 32nd Annual Northeast Bioengineering Conference, pp. 103–104. IEEE (2006)
Van De Berg, N.J., Van Gerwen, D.J., Dankelman, J., Van Den Dobbelsteen, J.J.: Design choices in needle steering? A review. IEEE/ASME Trans. Mechatron. 20(5), 2172–2183 (2014)
Scali, M., Pusch, T.P., Breedveld, P., Dodou, D.: Needle-like instruments for steering through solid organs: a review of the scientific and patent literature. Proc. Inst. Mech. Eng. [H] 231(3), 250–265 (2017)
Li, P., Yang, Z., Jiang, S.: Needle-tissue interactive mechanism and steering control in image-guided robot-assisted minimally invasive surgery: a review. Med. Biol. Eng. Comput. 56, 931–949 (2018)
Pacchierotti, C., Abayazid, M., Misra, S., Prattichizzo, D.: Teleoperation of steerable flexible needles by combining kinesthetic and vibratory feedback. IEEE Trans. Haptics 7(4), 551–556 (2014)
DiMaio, S.P., Salcudean, S.E.: Needle insertion modeling and simulation. IEEE Trans. Robot. Autom. 19(5), 864–875 (2003)
Webster, R.J., III., Kim, J.S., Cowan, N.J., Chirikjian, G.S., Okamura, A.M.: Nonholonomic modeling of needle steering. Int. J. Robot. Res. 25(5–6), 509–525 (2006)
Minhas, D.S., Engh, J.A., Fenske, M.M., Riviere, C.N.: Modeling of needle steering via duty-cycled spinning. In: 2007 29th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, pp. 2756–2759. IEEE (2007)
Goldenberg, S.L., Nir, G., Salcudean, S.E.: A new era: artificial intelligence and machine learning in prostate cancer. Nat. Rev. Urol. 16(7), 391–403 (2019)
Bharatha, A., Hirose, M., Hata, N., Warfield, S.K., Ferrant, M., Zou, K.H., Suarez-Santana, E., Ruiz-Alzola, J., D’amico, A., Cormack, R.A., et al.: Evaluation of three-dimensional finite element-based deformable registration of pre-and intraoperative prostate imaging. Med. Phys. 28(12), 2551–2560 (2001)
Gandia, R.M., Antonialli, F., Cavazza, B.H., Neto, A.M., Lima, D.A., Sugano, J.Y., Nicolai, I., Zambalde, A.L.: Autonomous vehicles: scientometric and bibliometric review. Transp. Rev. 39(1), 9–28 (2019)
Guo, G., Li, X.: A scientometric review of mobility-on-demand car-sharing systems. IEEE Intell. Transp. Syst. Mag. 15(1), 212–229 (2022)
Misra, S., Reed, K.B., Schafer, B.W., Ramesh, K., Okamura, A.M.: Mechanics of flexible needles robotically steered through soft tissue. Int. J. Robot. Res. 29(13), 1640–1660 (2010)
Reed, K.B., Majewicz, A., Kallem, V., Alterovitz, R., Goldberg, K., Cowan, N.J., Okamura, A.M.: Robot-assisted needle steering. IEEE Robot. Autom. Mag. 18(4), 35–46 (2011)
Alterovitz, R., Goldberg, K., Okamura, A.: Planning for steerable bevel-tip needle insertion through 2d soft tissue with obstacles. In: Proceedings of the 2005 IEEE International Conference on Robotics and Automation, pp. 1640–1645. IEEE (2005)
Park, W., Kim, J.S., Zhou, Y., Cowan, N.J., Okamura, A.M., Chirikjian, G.S.: Diffusion-based motion planning for a nonholonomic flexible needle model. In: Proceedings of the 2005 IEEE International Conference on Robotics and Automation, pp. 4600–4605. IEEE (2005)
Patil, S., Burgner, J., Webster, R.J., Alterovitz, R.: Needle steering in 3-d via rapid replanning. IEEE Trans. Rob. 30(4), 853–864 (2014)
Abayazid, M., Roesthuis, R.J., Reilink, R., Misra, S.: Integrating deflection models and image feedback for real-time flexible needle steering. IEEE Trans. Rob. 29(2), 542–553 (2012)
Glozman, D., Shoham, M.: Image-guided robotic flexible needle steering. IEEE Trans. Rob. 23(3), 459–467 (2007)
Swaney, P.J., Burgner, J., Gilbert, H.B., Webster, R.J.: A flexure-based steerable needle: high curvature with reduced tissue damage. IEEE Trans. Biomed. Eng. 60(4), 906–909 (2012)
Duindam, V., Alterovitz, R., Sastry, S., Goldberg, K.: Screw-based motion planning for bevel-tip flexible needles in 3d environments with obstacles. In: 2008 IEEE International Conference on Robotics and Automation, pp. 2483–2488. IEEE (2008)
Ruggerio, C.A.: Sustainability and sustainable development: a review of principles and definitions. Sci. Total Environ. 786, 147481 (2021)
Tanaka, N., Higashimori, M., Kaneko, M., Kao, I.: Noncontact active sensing for viscoelastic parameters of tissue with coupling effect. IEEE Trans. Biomed. Eng. 58(3), 509–520 (2010)
Small, H.: Co-citation in the scientific literature: a new measure of the relationship between two documents. J. Am. Soc. Inform. Sci. 24(4), 265–269 (1973)
Olawumi, T.O., Chan, D.W.: A scientometric review of global research on sustainability and sustainable development. J. Clean. Prod. 183, 231–250 (2018)
Nishant, R., Kennedy, M., Corbett, J.: Artificial intelligence for sustainability: challenges, opportunities, and a research agenda. Int. J. Inf. Manag. 53, 102104 (2020)
Borghesi, M., Ahmed, H., Nam, R., Schaeffer, E., Schiavina, R., Taneja, S., Weidner, W., Loeb, S.: Complications after systematic, random, and image-guided prostate biopsy. Eur. Urol. 71(3), 353–365 (2017)
Mottet, N., Bellmunt, J., Bolla, M., Briers, E., Cumberbatch, M.G., De Santis, M., Fossati, N., Gross, T., Henry, A.M., Joniau, S., et al.: Eau-estro-siog guidelines on prostate cancer. Part 1: screening, diagnosis, and local treatment with curative intent. Eur. Urol. 71(4), 618–629 (2017)
Walz, J., Graefen, M., Chun, F.K.-H., Erbersdobler, A., Haese, A., Steuber, T., Schlomm, T., Huland, H., Karakiewicz, P.I.: High incidence of prostate cancer detected by saturation biopsy after previous negative biopsy series. Eur. Urol. 50(3), 498–505 (2006)
Robertson, N.L., Emberton, M., Moore, C.M.: Mri-targeted prostate biopsy: a review of technique and results. Nat. Rev. Urol. 10(10), 589–597 (2013)
Cai, K., Zhang, W., Foda, M.F., Li, X., Zhang, J., Zhong, Y., Liang, H., Li, H., Han, H., Zhai, T.: Miniature hollow gold nanorods with enhanced effect for in vivo photoacoustic imaging in the nir-ii window. Small 16(37), 2002748 (2020)
Wang, X., Tong, J., He, Z., Yang, X., Meng, F., Liang, H., Zhang, X., Luo, L.: Paclitaxel-potentiated photodynamic theranostics for synergistic tumor ablation and precise anticancer efficacy monitoring. ACS Appl. Mater. Interfaces 12(5), 5476–5487 (2020)
Chen, J., Shuai, Z., Zhang, H., Zhao, W.: Path following control of autonomous four-wheel-independent-drive electric vehicles via second-order sliding mode and nonlinear disturbance observer techniques. IEEE Trans. Industr. Electron. 68(3), 2460–2469 (2020)
Howe, R.D., Matsuoka, Y.: Robotics for surgery. Annu. Rev. Biomed. Eng. 1(1), 211–240 (1999)
Satava, R.M.: Surgical robotics: the early chronicles: a personal historical perspective. Surg. Laparoscopy Endoscopy Percutaneous Tech. 12(1), 6–16 (2002)
Simaan, N., Yasin, R.M., Wang, L.: Medical technologies and challenges of robot-assisted minimally invasive intervention and diagnostics. Annu. Rev. Control Robot. Autonom. Syst. 1, 465–490 (2018)
Yulin, X., Ling, C., Xin, L., Aolei, Y., Yanran, L., Chunli, Z., Yanbo, L., Zhang, J.: Remote patrol service robot system design. J. Syst. Simul. 30(9), 3238 (2018)
Hagn, U., Nickl, M., Jörg, S., Passig, G., Bahls, T., Nothhelfer, A., Hacker, F., Le-Tien, L., Albu-Schäffer, A., Konietschke, R., et al.: The dlr miro: a versatile lightweight robot for surgical applications. Indust. Robot: Int. J. 35(4), 324–336 (2008)
Abolhassani, N., Patel, R., Moallem, M.: Needle insertion into soft tissue: a survey. Med. Eng. Phys. 29(4), 413–431 (2007)
Erp, J.B.V., Veen, H.A.V., Jansen, C., Dobbins, T.: Waypoint navigation with a vibrotactile waist belt. ACM Trans. Appl. Percept. (TAP) 2(2), 106–117 (2005)
Kuchenbecker, K.J., Gewirtz, J., McMahan, W., Standish, D., Martin, P., Bohren, J., Mendoza, P.J., Lee, D.I.: Verrotouch: High-frequency acceleration feedback for telerobotic surgery. In: Haptics: Generating and Perceiving Tangible Sensations: International Conference, EuroHaptics 2010, Amsterdam, July 8-10, 2010. Proceedings, Part I, pp. 189–196. Springer (2010)
Taylor, R.H., Mittelstadt, B.D., Paul, H.A., Hanson, W., Kazanzides, P., Zuhars, J.F., Williamson, B., Musits, B.L., Glassman, E., Bargar, W.L.: An image-directed robotic system for precise orthopaedic surgery. IEEE Trans. Robot. Autom. 10(3), 261–275 (1994)
Searle, A., Kirkup, L.: A direct comparison of wet, dry and insulating bioelectric recording electrodes. Physiol. Meas. 21(2), 271 (2000)
Abolhassani, N., Patel, R.: Deflection of a flexible needle during insertion into soft tissue. In: 2006 International Conference of the IEEE Engineering in Medicine and Biology Society, pp. 3858–3861. IEEE (2006)
Okamura, A.M., Simone, C., O’leary, M.D.: Force modeling for needle insertion into soft tissue. IEEE Trans. Biomed. Eng. 51(10), 1707–1716 (2004)
Abolhassani, N., Patel, R.: Minimization of needle deflection in robot-assisted prostate brachytherapy. Int. J. Comput. Assist. Radiol. Surg. 1, 269–271 (2006)
Albu-Schäffer, A., Ott, C., Hirzinger, G.: A unified passivity-based control framework for position, torque and impedance control of flexible joint robots. Int. J. Robot. Res. 26(1), 23–39 (2007)
Le Tien, L., Schaffer, A.A., Hirzinger, G.: Mimo state feedback controller for a flexible joint robot with strong joint coupling. In: Proceedings 2007 IEEE International Conference on Robotics and Automation, pp. 3824–3830. IEEE (2007)
Zhu, B., Zhou, L., Pu, S., Fan, J., Ye, Y.: Advances and challenges in multimodal remote sensing image registration. IEEE J. Miniaturiz. Air Space Syst. (2023)
Zhu, F., Zhu, X., Huang, Z., Ding, M., Li, Q., Zhang, X.: Deep learning based data-adaptive descriptor for non-rigid multi-modal medical image registration. Signal Process. 183, 108023 (2021)
Zhou, Q., Guo, J., Ding, M., Zhang, X.: Guided filtering-based nonlocal means despeckling of optical coherence tomography images. Opt. Lett. 45(19), 5600–5603 (2020)
Cheng, J., Li, H., Xiao, F., Fenster, A., Zhang, X., He, X., Li, L., Ding, M.: Fully automatic plaque segmentation in 3-d carotid ultrasound images. Ultrasound Med. Biol. 39(12), 2431–2446 (2013)
Ghaffari, M., Samarasinghe, G., Jameson, M., Aly, F., Holloway, L., Chlap, P., Koh, E.-S., Sowmya, A., Oliver, R.: Automated post-operative brain tumour segmentation: a deep learning model based on transfer learning from pre-operative images. Magn. Reson. Imaging 86, 28–36 (2022)
Dong, X., Yan, S., Duan, C.: A lightweight vehicles detection network model based on yolov5. Eng. Appl. Artif. Intell. 113, 104914 (2022)
Di Ieva, A., Russo, C., Liu, S., Jian, A., Bai, M.Y., Qian, Y., Magnussen, J.S.: Application of deep learning for automatic segmentation of brain tumors on magnetic resonance imaging: a heuristic approach in the clinical scenario. Neuroradiology 63, 1253–1262 (2021)
Salcudean, S.E., Sahebjavaher, R.S., Goksel, O., Baghani, A., Mahdavi, S.S., Nir, G., Sinkus, R., Moradi, M.: Biomechanical modeling of the prostate for procedure guidance and simulation. Soft tissue biomechanical modeling for computer assisted surgery, 169–198 (2012)
He, Y., Anderson, B.M., Cazoulat, G., Rigaud, B., Almodovar-Abreu, L., Pollard-Larkin, J., Balter, P., Liao, Z., Mohan, R., Odisio, B., et al.: Optimization of mesh generation for geometric accuracy, robustness, and efficiency of biomechanical-model-based deformable image registration. Med. Phys. 50(1), 323–329 (2023)
Shao, H.-C., Wang, J., Bai, T., Chun, J., Park, J.C., Jiang, S., Zhang, Y.: Real-time liver tumor localization via a single x-ray projection using deep graph neural network-assisted biomechanical modeling. Phys. Med. Biol. 67(11), 115009 (2022)
Ji, S., Ghajari, M., Mao, H., Kraft, R.H., Hajiaghamemar, M., Panzer, M.B., Willinger, R., Gilchrist, M.D., Kleiven, S., Stitzel, J.D.: Use of brain biomechanical models for monitoring impact exposure in contact sports. Ann. Biomed. Eng. 50(11), 1389–1408 (2022)
Hu, Y., Carter, T.J., Ahmed, H.U., Emberton, M., Allen, C., Hawkes, D.J., Barratt, D.C.: Modelling prostate motion for data fusion during image-guided interventions. IEEE Trans. Med. Imaging 30(11), 1887–1900 (2011)
Hu, Y., Ahmed, H.U., Taylor, Z., Allen, C., Emberton, M., Hawkes, D., Barratt, D.: Mr to ultrasound registration for image-guided prostate interventions. Med. Image Anal. 16(3), 687–703 (2012)
Hu, Y., Gibson, E., Ahmed, H.U., Moore, C.M., Emberton, M., Barratt, D.C.: Population-based prediction of subject-specific prostate deformation for mr-to-ultrasound image registration. Med. Image Anal. 26(1), 332–344 (2015)
Wang, Y., Cheng, J.-Z., Ni, D., Lin, M., Qin, J., Luo, X., Xu, M., Xie, X., Heng, P.A.: Towards personalized statistical deformable model and hybrid point matching for robust mr-trus registration. IEEE Trans. Med. Imaging 35(2), 589–604 (2015)
Wang, Y., Ni, D., Qin, J., Xu, M., Xie, X., Heng, P.-A.: Patient-specific deformation modelling via elastography: Application to image-guided prostate interventions. Sci. Rep. 6(1), 27386 (2016)
Lin, Y.-M., Paolucci, I., O’Connor, C.S., Anderson, B.M., Rigaud, B., Fellman, B.M., Jones, K.A., Brock, K.K., Odisio, B.C.: Ablative margins of colorectal liver metastases using deformable ct image registration and autosegmentation. Radiology 307(2), 221373 (2023)
Ramsey, C., Peterson, B., Hebert-Losier, K.: Measurement and reporting of footwear characteristics in running biomechanics: a systematic search and narrative synthesis of contemporary research methods. Sports Biomech. 22(3), 351–387 (2023)
Velec, M., Moseley, J., Svensson, S., Craig, T., Menard, C., Hårdemark, B., Brock, K., Jaffray, D.: Evaluation of biomechanical deformable image registration (dir) in a commercial radiation therapy planning system. Int. J. Radiat. Oncol. Biol. Phys. 93(3), 215–216 (2015)
Pan, Y., Wang, D., Chaudhary, M.F., Shao, W., Gerard, S.E., Durumeric, O.C., Bhatt, S.P., Barr, R.G., Hoffman, E.A., Reinhardt, J.M., et al.: Robust measures of image-registration-derived lung biomechanics in spiromics. J. Imaging 8(11), 309 (2022)
Xu, M., Wang, L.: Left ventricular myocardial motion tracking in cardiac cine magnetic resonance images based on a biomechanical model. J. X-Ray Sci. Technol. (Preprint), 1–19 (2023)
Ben-Zikri, Y.K., Helguera, M., Fetzer, D., Shrier, D.A., Aylward, S.R., Chittajallu, D., Niethammer, M., Cahill, N.D., Linte, C.A.: A feature-based affine registration method for capturing background lung tissue deformation for ground glass nodule tracking. Comput. Methods Biomech. Biomed. Eng.: Imaging Visual. 10(5), 521–539 (2022)
Chen, J., Tian, J.: Real-time multi-modal rigid registration based on a novel symmetric-sift descriptor. Prog. Nat. Sci. 19(5), 643–651 (2009)
Theljani, A., Chen, K.: An augmented lagrangian method for solving a new variational model based on gradients similarity measures and high order regularization for multimodality registration. Inverse Problems and Imaging (2019)
Zhu, F., Ding, M., Zhang, X.: Self-similarity inspired local descriptor for non-rigid multi-modal image registration. Inf. Sci. 372, 16–31 (2016)
Li, Z., Huang, F., Zhang, J., Dashtbozorg, B., Abbasi-Sureshjani, S., Sun, Y., Long, X., Yu, Q., Haar Romeny, B., Tan, T.: Multi-modal and multi-vendor retina image registration. Biomed. Opt. Express 9(2), 410–422 (2018)
Heinrich, M.P., Jenkinson, M., Bhushan, M., Matin, T., Gleeson, F.V., Brady, M., Schnabel, J.A.: Mind: Modality independent neighbourhood descriptor for multi-modal deformable registration. Med. Image Anal. 16(7), 1423–1435 (2012)
Heinrich, M.P., Jenkinson, M., Papież, B.W., Brady, S.M., Schnabel, J.A.: Towards realtime multimodal fusion for image-guided interventions using self-similarities. In: Medical Image Computing and Computer-Assisted Intervention–MICCAI 2013: 16th International Conference, Nagoya, Japan, September 22-26, 2013, Proceedings, Part I 16, pp. 187–194. Springer (2013)
Heinrich, M.P., Jenkinson, M., Papież, B.W., Glesson, F.V., Brady, S.M., Schnabel, J.A.: Edge-and detail-preserving sparse image representations for deformable registration of chest mri and ct volumes. In: Information Processing in Medical Imaging: 23rd International Conference, IPMI 2013, Asilomar, CA, USA, June 28–July 3, 2013. Proceedings 23, pp. 463–474. Springer (2013)
Kasiri, K., Fieguth, P., Clausi, D.A.: Self-similarity measure for multi-modal image registration. In: 2016 IEEE International Conference on Image Processing (ICIP), pp. 4498–4502. IEEE (2016)
Yang, F., Ding, M., Zhang, X., Hou, W., Zhong, C.: Non-rigid multi-modal medical image registration by combining l-bfgs-b with cat swarm optimization. Inf. Sci. 316, 440–456 (2015)
Abdel-Basset, M., Fakhry, A.E., El-Henawy, I., Qiu, T., Sangaiah, A.K.: Feature and intensity based medical image registration using particle swarm optimization. J. Med. Syst. 41, 1–15 (2017)
Shen, L., Huang, X., Fan, C., Li, Y.: Enhanced mutual information-based medical image registration using a hybrid optimisation technique. Electron. Lett. 54(15), 926–928 (2018)
Powell, M.J.: An efficient method for finding the minimum of a function of several variables without calculating derivatives. Comput. J. 7(2), 155–162 (1964)
Thevenaz, P., Unser, M.A.: Spline pyramids for intermodal image registration using mutual information. Wavelet Appl. Signal Image Process. V 3169, 236–247 (1997). (SPIE)
Thévenaz, P., Unser, M.: Optimization of mutual information for multiresolution image registration. IEEE Trans. Image Process. 9(12), 2083–2099 (2000)
Woo, J., Stone, M., Prince, J.L.: Multimodal registration via mutual information incorporating geometric and spatial context. IEEE Trans. Image Process. 24(2), 757–769 (2014)
Rivaz, H., Karimaghaloo, Z., Collins, D.L.: Self-similarity weighted mutual information: a new nonrigid image registration metric. Med. Image Anal. 18(2), 343–358 (2014)
Razlighi, Q.R., Kehtarnavaz, N.: Spatial mutual information as similarity measure for 3-d brain image registration. IEEE J. Transl. Eng. Health Med. 2, 27–34 (2014)
Lou, Y., Irimia, A., Vela, P.A., Chambers, M.C., Van Horn, J.D., Vespa, P.M., Tannenbaum, A.R.: Multimodal deformable registration of traumatic brain injury mr volumes via the Bhattacharyya distance. IEEE Trans. Biomed. Eng. 60(9), 2511–2520 (2013)
Loeckx, D., Slagmolen, P., Maes, F., Vandermeulen, D., Suetens, P.: Nonrigid image registration using conditional mutual information. IEEE Trans. Med. Imaging 29(1), 19–29 (2009)
Wang, F., Vemuri, B.C., Rao, M., Chen, Y.: A new & robust information theoretic measure and its application to image alignment. In: Biennial International Conference on Information Processing in Medical Imaging, pp. 388–400. Springer (2003)
Chen, H.-M., Varshney, P.K.: Mutual information-based ct-mr brain image registration using generalized partial volume joint histogram estimation. IEEE Trans. Med. Imaging 22(9), 1111–1119 (2003)
Chen, H.-M., Varshney, P.K., Arora, M.K.: Performance of mutual information similarity measure for registration of multitemporal remote sensing images. IEEE Trans. Geosci. Remote Sens. 41(11), 2445–2454 (2003)
Studholme, C., Hill, D.L., Hawkes, D.J.: An overlap invariant entropy measure of 3d medical image alignment. Pattern Recogn. 32(1), 71–86 (1999)
Viola, P., Wells, W.M., III.: Alignment by maximization of mutual information. Int. J. Comput. Vision 24(2), 137–154 (1997)
Rueckert, D., Sonoda, L.I., Hayes, C., Hill, D.L., Leach, M.O., Hawkes, D.J.: Nonrigid registration using free-form deformations: application to breast mr images. IEEE Trans. Med. Imaging 18(8), 712–721 (1999)
Shamonin, D.P., Bron, E.E., Lelieveldt, B.P., Smits, M., Klein, S., Staring, M., Initiative, A.D.N.: Fast parallel image registration on cpu and gpu for diagnostic classification of Alzheimer’s disease. Front. Neuroinform. 7, 50 (2014)
Lin, Y., Medioni, G.: Mutual information computation and maximization using gpu. In: 2008 IEEE Computer Society Conference on Computer Vision and Pattern Recognition Workshops, pp. 1–6. IEEE (2008)
Hu, Y., Modat, M., Gibson, E., Ghavami, N., Bonmati, E., Moore, C.M., Emberton, M., Noble, J.A., Barratt, D.C., Vercauteren, T.: Label-driven weakly-supervised learning for multimodal deformable image registration. In: 2018 IEEE 15th International Symposium on Biomedical Imaging (ISBI 2018), pp. 1070–1074. IEEE (2018)
Yang, X., Kwitt, R., Styner, M., Niethammer, M.: Quicksilver: Fast predictive image registration-a deep learning approach. Neuroimage 158, 378–396 (2017)
Zhao, S., Lau, T., Luo, J., Eric, I., Chang, C., Xu, Y.: Unsupervised 3d end-to-end medical image registration with volume tweening network. IEEE J. Biomed. Health Inform. 24(5), 1394–1404 (2019)
Balakrishnan, G., Zhao, A., Sabuncu, M.R., Guttag, J., Dalca, A.V.: An unsupervised learning model for deformable medical image registration. In: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pp. 9252–9260 (2018)
Kim, B., Kim, D.H., Park, S.H., Kim, J., Lee, J.-G., Ye, J.C.: Cyclemorph: cycle consistent unsupervised deformable image registration. Med. Image Anal. 71, 102036 (2021)
Fan, J., Cao, X., Xue, Z., Yap, P.-T., Shen, D.: Adversarial similarity network for evaluating image alignment in deep learning based registration. In: Medical Image Computing and Computer Assisted Intervention–MICCAI 2018: 21st International Conference, Granada, Spain, September 16-20, 2018, Proceedings, Part I, pp. 739–746. Springer (2018)
Duan, L., Yuan, G., Gong, L., Fu, T., Yang, X., Chen, X., Zheng, J.: Adversarial learning for deformable registration of brain mr image using a multi-scale fully convolutional network. Biomed. Signal Process. Control 53, 101562 (2019)
Cai, C., Sun, C., Han, Y., Zhang, Q.: Clinical flexible needle puncture path planning based on particle swarm optimization. Comput. Methods Programs Biomed. 193, 105511 (2020)
Zhang, L., Li, C., Fan, Y., Zhang, X., Zhao, J.: Physician-friendly tool center point calibration method for robot-assisted puncture surgery. Sensors 21(2), 366 (2021)
Zhang, W., Ma, Z., Wang, H., Deng, J., Li, P., Jia, Y., Dong, Y., Sha, H., Yan, F., Tu, W.: Study on automatic ultrasound scanning of lumbar spine and visualization system for path planning in lumbar puncture surgery. Math. Biosci. Eng. 20(1), 613–623 (2023)
Duindam, V., Xu, J., Alterovitz, R., Sastry, S., Goldberg, K.: Three-dimensional motion planning algorithms for steerable needles using inverse kinematics. Int. J. Robot. Res. 29(7), 789–800 (2010)
Alterovitz, R., Lim, A., Goldberg, K., Chirikjian, G.S., Okamura, A.M.: Steering flexible needles under markov motion uncertainty. In: 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 1570–1575. IEEE (2005)
Ratschan, S., She, Z.: Safety verification of hybrid systems by constraint propagation-based abstraction refinement. ACM Trans. Embedded Comput. Syst. (TECS) 6(1), 8 (2007)
Zan, J.: Research on robot path perception and optimization technology based on whale optimization algorithm. J. Comput. Cogn. Eng. 1(4), 201–208 (2022)
Alterovitz, R., Siméon, T., Goldberg, K.: The stochastic motion roadmap: A sampling framework for planning with markov motion uncertainty. In: Robotics: Science and Systems (2007)
Duindam, V., Xu, J., Alterovitz, R., Sastry, S., Goldberg, K.: 3d motion planning algorithms for steerable needles using inverse kinematics. In: Algorithmic Foundation of Robotics VIII: Selected Contributions of the Eight International Workshop on the Algorithmic Foundations of Robotics, pp. 535–549. Springer (2010)
Wu, T., Liu, J., Liu, J., Huang, Z., Wu, H., Zhang, C., Bai, B., Zhang, G.: A novel ai-based framework for aoi-optimal trajectory planning in uav-assisted wireless sensor networks. IEEE Trans. Wireless Commun. 21(4), 2462–2475 (2021)
Madridano, A., Al-Kaff, A., Martín, D., De La Escalera, A.: Trajectory planning for multi-robot systems: Methods and applications. Expert Syst. Appl. 173, 114660 (2021)
Baaj, M.H., Mahmassani, H.S.: An ai-based approach for transit route system planning and design. J. Adv. Transp. 25(2), 187–209 (1991)
Patil, S., Alterovitz, R.: Interactive motion planning for steerable needles in 3d environments with obstacles. In: 2010 3rd IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics, pp. 893–899. IEEE (2010)
Moreira, P., Patil, S., Alterovitz, R., Misra, S.: Needle steering in biological tissue using ultrasound-based online curvature estimation. In: 2014 IEEE International Conference on Robotics and Automation (ICRA), pp. 4368–4373. IEEE (2014)
Sun, W., Patil, S., Alterovitz, R.: High-frequency replanning under uncertainty using parallel sampling-based motion planning. IEEE Trans. Rob. 31(1), 104–116 (2015)
Xiong, J., Li, X., Gan, Y., Xia, Z.: Path planning for flexible needle insertion system based on improved rapidly-exploring random tree algorithm. In: 2015 IEEE International Conference on Information and Automation, pp. 1545–1550. IEEE (2015)
Tsumura, R., Kim, J.S., Iwata, H., Iordachita, I.: Preoperative needle insertion path planning for minimizing deflection in multilayered tissues. IEEE Robot. Autom. Lett. 3(3), 2129–2136 (2018)
Silva, M., Ambrósio, J.: Kinematic data consistency in the inverse dynamic analysis of biomechanical systems. Multibody Syst. Dyn. 8, 219–239 (2002)
Li, G., Fang, Q., Xu, T., Zhao, J., Cai, H., Zhu, Y.: Inverse kinematic analysis and trajectory planning of a modular upper limb rehabilitation exoskeleton. Technol. Health Care 27(S1), 123–132 (2019)
Liu, T., Jackson, R., Franson, D., Poirot, N.L., Criss, R.K., Seiberlich, N., Griswold, M.A., Çavuşoğlu, M.C.: Iterative Jacobian-based inverse kinematics and open-loop control of an mri-guided magnetically actuated steerable catheter system. IEEE/ASME Trans. Mechatron. 22(4), 1765–1776 (2017)
Huda, M.A.N., Susilo, S.H., Adhi, P.M.: Implementation of inverse kinematic and trajectory planning on 6-dof robotic arm for straight-flat welding movement. Logic: Jurnal Rancang Bangun dan Teknologi 22(1), 51–61 (2022)
Silva, D., Garrido, J., Riveiro, E.: Stewart platform motion control automation with industrial resources to perform cycloidal and oceanic wave trajectories. Machines 10(8), 711 (2022)
Xu, J., Duindam, V., Alterovitz, R., Goldberg, K.: Motion planning for steerable needles in 3d environments with obstacles using rapidly-exploring random trees and backchaining. In: 2008 IEEE International Conference on Automation Science and Engineering, pp. 41–46. IEEE (2008)
Lu, J., She, Z., Liu, B., Ge, S.S.: Analysis and verification of input-to-state stability for nonautonomous discrete-time switched systems via semidefinite programming. IEEE Trans. Autom. Control 66(9), 4452–4459 (2020)
She, Z., Li, M.: Over-and under-approximations of reachable sets with series representations of evolution functions. IEEE Trans. Autom. Control 66(3), 1414–1421 (2020)
Zhang, X., Zhan, Y., Ding, M., Hou, W., Yin, Z.: Decision-based non-local means filter for removing impulse noise from digital images. Signal Process. 93(2), 517–524 (2013)
Wu, K., Li, B., Zhang, Y., Dai, X.: Review of research on path planning and control methods of flexible steerable needle puncture robot. Comput. Assist. Surg. 27(1), 91–112 (2022)
Kallem, V., Cowan, N.J.: Image guidance of flexible tip-steerable needles. IEEE Trans. Rob. 25(1), 191–196 (2009)
Khadem, M., Rossa, C., Usmani, N., Sloboda, R.S., Tavakoli, M.: Feedback-linearization-based 3d needle steering in a Frenet-Serret frame using a reduced order bicycle model. In: 2017 American Control Conference (ACC), pp. 1438–1443. IEEE (2017)
Lapouge, G., Troccaz, J., Poignet, P.: Multi-rate unscented Kalman filtering for pose and curvature estimation in 3d ultrasound-guided needle steering. Control. Eng. Pract. 80, 116–124 (2018)
Rucker, D.C., Das, J., Gilbert, H.B., Swaney, P.J., Miga, M.I., Sarkar, N., Webster, R.J.: Sliding mode control of steerable needles. IEEE Trans. Rob. 29(5), 1289–1299 (2013)
Motaharifar, M., Talebi, H.A., Abdollahi, F., Afshar, A.: Nonlinear adaptive output-feedback controller design for guidance of flexible needles. IEEE/ASME Trans. Mechatron. 20(4), 1912–1919 (2014)
Fallahi, B., Rossa, C., Sloboda, R.S., Usmani, N., Tavakoli, M.: Sliding-based image-guided 3d needle steering in soft tissue. Control. Eng. Pract. 63, 34–43 (2017)
Fallahi, B., Waine, M., Rossa, C., Sloboda, R., Usmani, N., Tavakoli, M.: An integrator-backstepping control approach for three-dimensional needle steering. IEEE/ASME Trans. Mechatron. 24(5), 2204–2214 (2019)
Khadem, M., Rossa, C., Usmani, N., Sloboda, R.S., Tavakoli, M.: Geometric control of 3d needle steering in soft-tissue. Automatica 101, 36–43 (2019)
Lu, M., Zhang, Y., Lim, C.M., Ren, H.: Flexible needle steering with tethered and untethered actuation: Current states, targeting errors, challenges and opportunities. Ann. Biomed. Eng. 51(5), 905–924 (2023)
Karimi, S., Konh, B.: Kinematics modelling and dynamics analysis of an sma-actuated active flexible needle for feedback-controlled manipulation in phantom. Med. Eng. Phys. 107, 103846 (2022)
Chen, X., Yan, Y., Li, A., Wang, T., Wang, Y.: Robot-assisted needle insertion for ct-guided puncture: Experimental study with a phantom and animals. Cardiovasc. Intervent. Radiol. 46(1), 128–135 (2023)
Sugiyama, K., Matsuno, T., Kamegawa, T., Hiraki, T., Nakaya, H., Yanou, A., Minami, M.: Reaction force analysis of puncture robot for ct-guided interventional radiology in animal experiment. In: 2015 IEEE/SICE International Symposium on System Integration (SII), pp. 7–12. IEEE (2015)
Martinez, R.M., Ptacek, W., Schweitzer, W., Kronreif, G., Fürst, M., Thali, M.J., Ebert, L.C.: Ct-guided, minimally invasive, postmortem needle biopsy using the b-r ob ii needle-positioning robot. J. Forensic Sci. 59(2), 517–521 (2014)
Maurin, B., Doignon, C., Gangloff, J., Bayle, B., Mathelin, M., Piccin, O., Gangi, A.: Ctbot: A stereotactic-guided robotic assistant for percutaneous procedures of the abdomen. In: Medical Imaging 2005: Visualization, Image-Guided Procedures, and Display, vol. 5744, pp. 241–250. SPIE (2005)
Fischer, G.S., Iordachita, I., Csoma, C., Tokuda, J., DiMaio, S.P., Tempany, C.M., Hata, N., Fichtinger, G.: Mri-compatible pneumatic robot for transperineal prostate needle placement. IEEE/ASME Trans. Mechatron. 13(3), 295–305 (2008)
Bricault, I., Zemiti, N., Jouniaux, E., Fouard, C., Taillant, E., Dorandeu, F., Cinquin, P.: Light puncture robot for ct and mri interventions. IEEE Eng. Med. Biol. Mag. 27(3), 42–50 (2008)
Song, S.-E., Cho, N.B., Fischer, G., Hata, N., Tempany, C., Fichtinger, G., Iordachita, I.: Development of a pneumatic robot for mri-guided transperineal prostate biopsy and brachytherapy: New approaches. In: 2010 IEEE International Conference on Robotics and Automation, pp. 2580–2585. IEEE (2010)
Seitel, A., Walsh, C.J., Hanumara, N.C., Shepard, J.-A., Slocum, A.H., Meinzer, H.-P., Gupta, R., Maier-Hein, L.: Development and evaluation of a new image-based user interface for robot-assisted needle placements with the robopsy system. In: Medical Imaging 2009: Visualization, Image-Guided Procedures, and Modeling, vol. 7261, pp. 305–313. SPIE (2009)
Liu, H.-H., Li, L.-J., Shi, B., Xu, C.-W., Luo, E.: Robotic surgical systems in maxillofacial surgery: a review. Int. J. Oral Sci. 9(2), 63–73 (2017)
Tianmiao, W., Jun, W., Da, L., Lei, H., Wenyong, L.: An internet robot assistant tele-neurosurgery system case. In: 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 2845–2849. IEEE (2006)
Duan, X.-G., Bian, G.-B., Zhao, H.-H., Wang, X.-T., Huang, Q.: A medical robot for needle placement therapy in liver cancer. J. Zhejiang Univ. Sci. A 11, 263–269 (2010)
Jiang, S., Feng, W., Lou, J., Yang, Z., Liu, J., Yang, J.: Modelling and control of a five-degrees-of-freedom pneumatically actuated magnetic resonance-compatible robot. Int. J. Med. Robot. Comput. Assist. Surg. 10(2), 170–179 (2014)
Jiang, S., Yuan, W., Yang, Y., Zhang, D., Liu, N., Wang, W.: Modelling and analysis of a novel ct-guided puncture robot for lung brachytherapy. Adv. Robot. 31(11), 557–569 (2017)
Acknowledgements
This research was funded by the National Key Research and Development Program of China (Grant No. 2018YFE0206900).
Funding
This research was funded by the National Key Research and Development Program of China (Grant No.2018YFE0206900).
Author information
Authors and Affiliations
Contributions
SL.Z. JC.C. and HK.S. wrote the main manuscript text, SL.Z. and JC.C. prepared Figures 1–3, SL.Z. and HK.S. prepared figures 4–8, SL.Z. Z.Q and H.Z. prepared figures 9. All authors reviewed the manuscript.
Corresponding author
Ethics declarations
Conflict of interest
I declare that the authors have no conflict of interest as defined by Springer, or other interests that might be perceived to influence the results and/or discussion reported in this paper.
Ethics approval and consent to participate
I have read and understood the publishing policy, and submit this manuscript in accordance with this policy.
Consent for publication
I have read and understood the publishing policy and submit this manuscript in accordance with this policy.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Below is the link to the electronic supplementary material.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Zhang, S., Chen, J., Sun, H. et al. A scientometric review of medical flexible needle systems in surgery: signal processing, navigation and control. SIViP 18 (Suppl 1), 627–642 (2024). https://doi.org/10.1007/s11760-024-03179-0
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11760-024-03179-0