
Abstract
The hypoplastic model for sands proposed by Wolffersdorff (Mech Cohes Frict Mater 1: 251–271, 1996) combined with the intergranular strain anisotropy by Fuentes and Triantafyllidis (Int J Numer Anal Meth Geomech 39: 1235–1254, 2015) is herein extended to account for cyclic mobility effects to allow for the simulation of liquefaction phenomena. The extension is based on the introduction of an additional state variable that permits the detection of cyclic mobility paths. The simulation capabilities of the model is compared with undrained triaxial tests of Karlsruhe fine sand. At the end, a finite element simulation of an offshore monopile embedded in sand, exposed to environmental forces from the Caribbean Sea, is constructed and analyzed.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
The intergranular strain anisotropy (ISA) is a mathematical extension of conventional hypoplastic models for soils (e.g., [7, 15, 17, 18, 24, 25, 46, 50, 51]) to enable the simulation of cyclic loading. It can be considered as an enhancement of the intergranular strain (IS) theory proposed by Niemunis and Herle [31] for the same purpose. Both theories are based on the introduction of a state variable, which provides information of recent changes in the strain rate direction. ISA was originally proposed by Fuentes and Triantafyllidis [11] to reproduce the following characteristics: (a) a threshold strain amplitude dividing the plastic and elastic regime; (b) the stiffness increase upon reversal loading; and (c) the reduction of the plastic strain rate for same conditions. Successful simulations of cyclic loading were achieved for a low number of repetitive cycles (\(N<10\)) under undrained cyclic conditions [11]. Subsequently, an improved version of ISA was proposed in [10, 12, 35] to simulate larger numbers of repetitive cycles (\(N>10\)) upon one-dimensional and multi-dimensional paths. In particular, the hypoplastic model for sands proposed by Wolffersdorff [49] and extended by ISA, hereafter referred to as HP + ISA, has proved to capture well the accumulation of pore water pressure under undrained triaxial cycles [12, 35], but lacks congruence on the simulation of cyclic mobility effects. The latter limitation has disabled, for example, the proper simulation of the effective stress reduction on analyses related to liquefaction phenomena. So far, the cyclic mobility effect has never been tackled on hypoplastic models extended by ISA. To the authors opinion, two reasons explain the lack of this effect on these models: The first is the fact that hypoplastic models have shown to reproduce well the stress–dilatancy ratio (q / p vs. \(\dot{\varepsilon }_v/\dot{\varepsilon }_s\), see notation in “Appendix A”) under cyclic drained triaxial tests with constant mean stress (\(p=\) const), property considered as a formal advantage of this model family by some authors [29, 51]. Modification of the constitutive equation to account for cyclic mobility effects may eventually compromise its capabilities on the mentioned property. The second is related to the fact that extensions based on the intergranular strain (IS) concept, such as [31, 45] and [11, 12, 35], are focused only on the behavior at small strain amplitudes, contrasting to cyclic mobility effects which are exhibited on cycles of large strain amplitudes.
The present work introduces an extension of the hypoplastic model for sands proposed by Wolffersdorff [49] implementing ISA (HP + ISA) to account for cyclic mobility effects. Attention is given on the formulation to guarantee the correct assessment of the stress–dilatancy ratio (q / p vs. \(\dot{\varepsilon }_v/\dot{\varepsilon }_s\)) under drained triaxial \(p=\) const tests. For this purpose, a strain-type state variable is proposed to provide information about the recent direction of the strain rate after reaching large strain amplitudes. With this, a mechanism to detect paths at which the cyclic mobility effect should be activated is proposed, and the hypoplastic model extended by ISA is modified to account for cyclic mobility effects. The modification is simple and introduces two additional parameters and a state variable. In addition, a modification is also introduced to improve simulations under transverse loading. The work is ended with a finite element (FE) simulation of an offshore monopile founded on a sandy soil. The simulation is performed under dynamic analysis to reproduce an extreme event typical for the Caribbean Sea. The resulting liquefaction zones of the FE model are carefully analyzed. The work begins with a brief description of the ISA-hypoplastic model. Subsequently, the proposed extension accounting for cyclic mobility effects is explained. Following this, the assessment of the proposed model on simulations of some cyclic tests is evaluated. Finally, the FE example of the offshore monopile is qualitatively analyzed. Notation and conventions adopted in the current work are given in “Appendix A”.
2 Brief description of ISA-hypoplastic model
The following general form of hypoplasticity is considered in the present work:
where \(\dot{\varvec{\sigma }}\) is the stress rate tensor, \(\dot{{{\varvec{\varepsilon }} }}\) is the strain rate tensor and \(\mathsf{L}^\mathrm{hyp}\) and \(\mathbf {N}^\mathrm{hyp}\) are the (fourth rank) linear stiffness and (second rank) nonlinear stiffness, respectively, formulated as functions of the stress \({\varvec{\sigma }}\) and the void ratio e only, i.e., \(\mathsf{L}^\mathrm{hyp}=\mathsf{L}^\mathrm{hyp}({\varvec{\sigma }},e)\) and \(\mathbf {N}^\mathrm{hyp}=\mathbf {N}^\mathrm{hyp}({\varvec{\sigma }},e)\). The same relation can be rewritten in terms of its continuum tangent modulus \(\mathsf{M}=(\partial \dot{\varvec{\sigma }})/(\partial {\dot{{{\varvec{\varepsilon }} }}})\) as:
Tensors \(\mathsf{L}^\mathrm{hyp}\) and \(\mathbf {N}^\mathrm{hyp}\) are adjusted to simulate the behavior of the soil under medium and large strain amplitudes, or equivalently, under monotonic loading [15, 17, 18, 24, 50, 51]. For this work, definitions of tensors \(\mathsf{L}^\mathrm{hyp}\) and \(\mathbf {N}^\mathrm{hyp}\) follow from relations proposed by Wolffersdorff [49] for sands. For paths with complex cyclic loading, Eq. 2 is not well suited, and an extension to capture small strain effects is required.
The ISA approach by Fuentes and Triantafyllidis [11], understood as an extension for hypoplastic models to enable simulations on cyclic loading, was proposed to that end. This approach is based on the concept of intergranular strain (IS), originally introduced by Niemunis and Herle [31] in a former formulation. The main difference of the ISA formulation [11] with respect to conventional IS [31], is the introduction of an elastic locus to describe the small strain behavior. According to the ISA theory, the rate of the intergranular strain \(\mathbf {h}\) evolves through an elastoplastic formulation:
where \(F_H\) is a yield surface function, \({\dot{\lambda }}\) is the plastic multiplier and \(\mathbf {N}\) is an associated flow rule \((\mathbf {N}=\partial F_H/\partial \mathbf {h})\). The yield function \(F_H\) was formulated to consider an elastic threshold strain \(\parallel \Delta {\varvec{\varepsilon }}\parallel =R\). Considering that under elastic conditions \(F_H<0\), increments in strains are equal to increments in intergranular strain, i.e., \(\Delta {\varvec{\varepsilon }}=\Delta \mathbf {h}\) (see Eq. 3), the elastic strain amplitude is simply described through the following yield surface function \(F_H\):
where tensor \(\mathbf {c}\) defines the center of the yield surface (kinematic hardening variable). To account for small strain effects, the ISA approach reformulates the continuum tangent stiffness \(\mathsf{M}\) from Eq. 2 according to the following relation:
where m is a scalar function (\(1\le m\le m_R\)) controlling the stiffness decay upon different strain amplitudes, \(m_R\ge 1\) is a parameter, \(\rho\) is a scalar function (\(0\le \rho \le 1\)) controlling the increase of plastic strain rate for increasing strain amplitudes and \(\chi\) is an exponent to control the mentioned behavior (see “Appendix C” for their definitions). These equations depend on the IS tensor \(\mathbf {h}\) and other internal state variables which are carefully explained in [11, 12, 35]. Complete set of equations is given in “Appendix C” while details are found in [11, 12, 35].
One of the advantages of ISA-hypoplasticity is the ease to adapt its equation to a convenient mathematical relation depending on the strain amplitude: For small strain amplitudes (\(\parallel \Delta {\varvec{\varepsilon }}\parallel <10^{-4}\)), the response is elastic and the model delivers \(\dot{{\varvec{\sigma }}}=m_R \mathsf{L}^\mathrm{hyp}:\dot{{{\varvec{\varepsilon }} }}\) with (\(m=m_R\), \(\rho =0\)). Under medium strain amplitudes (\(10^{-4}<\parallel \Delta {\varvec{\varepsilon }}\parallel <10^{-2}\)), the transitional equation \(\dot{{\varvec{\sigma }}}=m (\mathsf{L}^\mathrm{hyp} + \rho ^{\chi } \mathbf {N}^\mathrm{hyp}\mathbf {N}):\dot{{{\varvec{\varepsilon }} }}\) with (\(0<\rho <1\) and \(1<m<m_R\)) is rendered providing a smooth response. Finally, under large strain amplitudes \(\parallel \Delta {\varvec{\varepsilon }}\parallel >10^{-3}\), the model coincides with the hypoplastic equation \(\dot{{\varvec{\sigma }}}=(\mathsf{L}^\mathrm{hyp} + \mathbf {N}^\mathrm{hyp}\mathbf {N}):\dot{{{\varvec{\varepsilon }} }}\) with (\(m=\rho =1\)), favorable for the simulation of monotonic loading.
In Fig 1, some simulations of the degradation of the shear secant stiffness \(G_\mathrm{sec}\) of the Karlsruhe fine sand are shown (parameters of Table 1). For its construction, several cyclic drained triaxial tests of different strain amplitudes were simulated, considering an initial void ratio of \(e_0=0.85\) and different confining pressures \(p_0=\{200,300\}\) kPa. The 5th cycle of the cyclic tests was considered for the computation of \(G_\mathrm{sec}\). For comparison purposes, the empirical relation proposed by Wichtmann and Triantafyllidis [47] based on a large number of experiments is included in Fig. 1b, see “Appendix B” for details. This empirical relation can only be considered as an approximation of the real behavior, since it depends only on the uniformity coefficient \(c_u\), and has been calibrated on measurements with bender element tests on different sands. The results show that the estimation of \(G_\mathrm{max}\) and its subsequent degradation approximately coincides with the empirical relation. It is noted, however, that the transition from elastic to plastic is not smoothly described, as by other elastoplastic models.

Simulation of the degradation curve of the shear secant stiffness \(G_\mathrm{sec}\) with ISA-hypoplasticity. Empirical relation by [47]. a\(G_\mathrm{sec}/G_\mathrm{max}\) versus \(\parallel \Delta {\varvec{\varepsilon }}\parallel\), and sketch of model response. b Simulation against empirical relation by [47]. Karlsruhe fine sand. Parameters from Table 1. Initial void ratio \(e_0=0.85\)
3 Incorporation of cyclic mobility effect
Under undrained large deformations, the dilative behavior of the material is accompanied by a strong rearrangement of particle contacts depending on the shearing direction [6, 22]. When the shearing direction is reversed, the previous tendency to dilate is followed by a contractant behavior with positive pore pressure build-up, which causes the cyclic mobility effect. The effect has been reproduced under large shearing deformations through discrete element method (DEM) simulations, and it has been shown that during this mechanism, a strong rearrangement of particle contacts is observed [19, 28, 37, 38, 43]. For constitutive modeling purposes, some authors have shown that paths at which the cyclic mobility effect is activated can be detected through the incorporation of an additional tensorial state variable, which evolves only at large strain amplitudes exhibiting a dilatant behavior [1, 4, 6, 21, 30, 39]. Following a similar strategy, we introduce a second-rank state variable tensor, denoted by \(\mathbf {Z}\), which provides information related to the recent history of the shearing loading direction under large strain amplitudes. For convenience, the shearing loading direction is in this work described by the IS flow rule tensor \(\mathbf {N}\), considering that under monotonic paths, the relation \(\mathbf {N}=\overrightarrow{\dot{{{\varvec{\varepsilon }} }}}\) holds [9, 11]. Hence, a suitable relation for the evolution equation of tensor \(\mathbf {Z}\) is:
where \(c_z\) is a material constant, the operators \(\langle\)\(\rangle\) are the Macaulay brackets (\(\langle \cup \rangle =\cup\) for \(\cup >0\) and \(\langle \cup \rangle =\cup =0\) otherwise), and \(F_d\) is a scalar function to be defined. Notice that the general form of Eq. 6 is similar as in other works [1, 4, 6, 21, 39]. Accordingly, factor \(\langle F_d \rangle\) is only different from zero for positive values of \(F_d\). For the sake of convenience, \(F_d\) is a positive function (\(F_d>0\)) only when the strain amplitude is sufficiently large to activate the rearrangement of the particle contacts producing a dilatant behavior under triaxial shearing. Some constitutive models have proposed the use of a ”dilatancy surface function” for \(F_d\), defined as the surface in the stress space at which the plastic volumetric strains \(\varepsilon ^p_{ii}\) turn from contractant (\(\dot{\varepsilon ^p}_{ii}<0)\) to dilatant (\(\dot{\varepsilon ^p}_{ii}> 0)\) upon triaxial shearing, i.e., \(F_d=0\) when \(\dot{\varepsilon }^p_{ii}=0\). This is convenient for conventional elastoplastic models, because it coincides with the phase transformation line observed under undrained triaxial shearing, which is dependent on the current stress \({\varvec{\sigma }}\) and void ratio e according to experimental observations [20]. However, hypoplastic models do not incorporate directly such surface on its formulation considering that there is no explicit definition of a plastic strain rate. Indeed, the resulting contractancy–dilantacy behavior under undrained triaxial shearing depends on both tensors \(\mathsf{L}^\mathrm{hyp}\) and \(\mathbf {N}^\mathrm{hyp}\) and not on an explicitly defined flow rule as by some elastoplastic modelsFootnote 1. After a careful inspection of the simulations with the hypoplastic model by Wolffersdorff [49], we propose the following simple function for \(F_d\) suited to detect large strain amplitudes responsible for the dilatant behavior under undrained triaxial shearing:
where q is the deviator stress, p is the mean (effective) stress, \(M=M_c F=6\sin (\varphi _c)/(3-\sin \varphi _c) F\) is the critical state slope in the \(q-p\) space, \(f_{d0}\) is the pyknotropy factor [49], F is a scalar function controlling the Matsuoka–Nakai shape of the critical state surface [26] and is defined in Eq. 39, and \(\varphi _c\) is the critical state friction angle. Note that Eq. 7 depends on factor \(f_{d0}\) and therefore on the void ratio e. Equation 7 does not represent exactly the phase transformation line (PTL), but has proved to be a good approximation of this line on simulations of undrained triaxial tests with hypoplasticity. This is shown in Fig. 2 which presents simulation examples of undrained triaxial tests with different void ratios using parameters of Table 1. The curve resulting from the relation \(F_d=0\), see Eq. 7, has been also included for comparison purposes.

Simulations of undrained monotonic triaxial compression tests. Variation of the void ratio. aq versus \(\varepsilon _1\) space. bq versus p space, the curve \(F_d=0\) from Eq. 7 is depicted and coincides approximately with the phase transformation line
We now proceed to formulate a scalar factor aiming to detect paths at which the cyclic mobility effect should be active. To that end, the scalar factor \(f_z\) depending on tensor \(\mathbf {Z}\) is introduced:
Note that factor \(f_z\) is bounded by \(0\le f_z\le 1\). A value of \(f_z=0\) indicates that the effect of the cyclic mobility is negligible, while a value of \(f_z=1\) means that it must be fully considered. Intermediate values of \(0<f_z< 1\) would intend to describe a transition between these two states. In this sense, factor \(f_z\) controls the intensity at which the cyclic mobility effect should be considered.
Having factor \(f_z\) defined, an extension to the ISA + HP model is now carefully proposed to account for cyclic mobility effects. Under a cyclically mobilized path, factor \(f_z\) is greater than zero, i.e., \(f_z>0\), and a more contractant behavior should be simulated. It will be shown that this contractant effect can be simply captured if a similar contractant behavior of the material as by its loose state is delivered, i.e., \(e\approx e_c\), where \(e_c\) is the critical state void ratio. Considering this, the following mathematical statements are proposed to be fulfilled:
For cyclic mobility states with \(f_z=1\), the scalar factors \(f_e\) and \(f_d\) are set to one, i.e., \(f_e=f_d=1\). Note that this is similar to replace \(e=e_c\) at the original definitions of factors \(f_e\) and \(f_d\) (see Eqs. 38).
For same conditions (\(f_z=1\)), the effect of the intergranular strain must be reduced to avoid an excessively stiff behavior on cyclic mobility paths.
To fulfill the first requirement, the scalar factors \(f_e\) and \(f_d\) are modified according to the following relations:
where \(e_d=e_d(p)\) is the minimum void ratio (see “Appendix C”), and \(\alpha\) and \(\beta\) are material parameters. Note that for \(f_z=1\), both factors render \(f_{e}=f_d=1\), and consequently a contractant behavior as by loose sand is reproduced. For \(f_z=0\) their original formulations \(f_e=f_{e0}\) and \(f_d=f_{d0}\) are recovered.
For the second requirement, factor \(\beta _h\) is reformulated aiming to reduce the strain amplitude at which the IS effect acts. Increasing the value of \(\beta _h\) would reduce the IS effect avoiding a stiff behavior on cyclic mobility paths. In the original model, factor \(\beta _h=\beta _\mathrm{h0}\) is set to a constant for all cases, however, we propose the following relation for \(\beta _h\) to provide the desired response:
where \(f_z\) was previously defined in Eq. 8, \(f_h\) is a function, and \(\beta _\mathrm{hmax}\) and \(\beta _\mathrm{h0}\) are material parameters controlling the maximum and minimum values of \(\beta _\mathrm{h0} \le \beta _h\le \beta _\mathrm{hmax},\) respectively. Under the assumption of \(f_h=1\), the lack of cyclic mobility effects \(f_z=0\) would give \(\beta _h=\beta _\mathrm{h0}\), while for the opposite case \(f_z=1\), the relation \(\beta _h=\beta _\mathrm{hmax}\) holds. It will be shown that this would reduce the effect on cyclic mobility paths. Function \(f_h\) has been additionally introduced to improve simulations on transverse loading. Accordingly, a value of \(f_h=1\) is only obtained on reverse loading (one-dimensional cycles), such as cyclic undrained triaxial tests. For other cases, as for example transverse loading, values within the range \(0\le f_h<1\) are obtained. Considering this, the following function has been proposed:
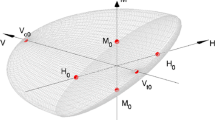
where \(R\overrightarrow{\dot{{{\varvec{\varepsilon }} }}}\) is the image of tensor \(\mathbf {h}\) mapped by \(\overrightarrow{\dot{{{\varvec{\varepsilon }} }}}\) at the IS bounding surface, and R is a parameter. Hence, it gives \(f_h=1\) only for one-dimensional cycles, because \(\mid \overrightarrow{\dot{{{\varvec{\varepsilon }} }}}:\overrightarrow{\mathbf {d}_b}\mid =1\) holds. Otherwise, factor \(f_h\) gives \(f_h<1\). A special case of transverse loading is depicted in Fig. 3, corresponding to undrained triaxial shearing after isotropic compression. One may note that the new parameter \(\beta _\mathrm{hmax}\) controls the behavior of the \(q-p\) path at the beginning of the curve. This would allow the calibration of \(\beta _\mathrm{hmax}\) by trial and error on such curves.

The mechanism of transverse loading is schematized. a position of the IS yield surface and internal variables at transverse loading (undrained shearing after isotropic compression). b simulations of undrained triaxial tests with variation of parameter \(\beta _\mathrm{hmax}\)
Figure 4 shows a simple simulation example to illustrate the evolution of \(\mathbf {Z}\). It consists of a cyclic undrained triaxial test (initial conditions \(e_0=0.8\), \(p_0=100\) kPa, parameters from Table 1), with constant deviator stress amplitude \(q^\mathrm{amp}=60\) kPa. Figure 4a, b (q vs. \(\varepsilon _1\) and q vs. p) shows that for such simulation, the material requires only 4 cycles to activate the cyclic mobility effect. According to Eqs. 6 and 7, tensor \(\mathbf {Z}\) evolves toward \(\mathbf {N}\) when \(F_d>0\) (see Fig. 2). This can be noted in Fig. 4c, where close to the 4th cycle, the evolution of \(\mathbf {Z}\) is activated. The cyclic mobility effect is considered in the model when the condition \(f_z=\langle -\mathbf {Z}:\mathbf {N}\rangle >0\) holds, which usually occurs on paths after reversal loading (\(\mathbf {Z}:\mathbf {N}<0\)).

Simulation example of cyclic undrained triaxial test (\(e_0=0.8\), \(p_0=100\) kPa, \(q^\mathrm{amp}=60\)). Parameters from Table 1. aq versus \(\varepsilon _1\). bq versus p. c\(Z_{11}\) and \(N_{11}\) versus N
The extended model requires the calibration of the new parameters \(c_z\) and \(\beta _\mathrm{hmax}\). While \(\beta _\mathrm{hmax}\) can be calibrated on transverse loading paths, as depicted in Fig. 3, \(c_z\) can be calibrated on the butterfly-shaped loops exhibited on undrained triaxial cycles, as shown in Fig. 5. In this figure, a cyclic undrained triaxial test with constant deviator stress amplitude (\(q^\mathrm{amp}=40\) kPa) has been simulated with \(c_z=0\) and \(c_z=300\). For instance, parameters of Table 1 have been borrowed. One may intermediately note the ability of the model to reproduce cyclic mobility effects with the new extension through the selection \(c_z=300\).

Simulation of cyclic undrained triaxial test with variation of \(c_z\). Karlsruhe fine sand parameters. \(p_0=\) 200 kPa. a Experiment by [48] b\(c_z=0\), c\(c_z=300\)
4 Simulation of element tests
Some simulations of element tests (homogeneous stress–strain field assumption) of a sand are now shown with the proposed model. The testing sand corresponds to the Karlsruhe fine sand, previously analyzed in other works [12, 35, 48]. The selected parameters are summarized in Table 1 and were found as follows: parameters of the hypoplastic model without extension (\(\varphi _c\), \(h_s\), \(n_B\), \(e_{d0}\), \(e_{c0}\), \(e_{i0}\), \(\alpha\), \(\beta\)) were directly adopted from the calibration performed in [48]. Parameters R, \(m_R\) are the same reported by Poblete et al. [35] for the same material. Parameters \(\chi _0\), \(\chi _\mathrm{max}\), \(\beta _\mathrm{h0}\), \(c_a\) were found following the calibration guide proposed in [35] to improve their accuracy on simulations, while the new parameters \(c_z\), \(\beta _\mathrm{hmax}\) were calibrated according to the explanation given in Sect. 3. The numerical implementation developed in [35], written in Fortran code under the syntax of the subroutine UMAT from the commercial software Abaqus Standard, has been herein extended to account for the cyclic mobility effects according to the relations of Sect. 3. The implementation was performed in the following way: A substepping scheme, with very small strain subincrements (\(\parallel \Delta {\varvec{\varepsilon }}\parallel <R/4\)), was implemented to achieve numerical convergence. For the intergranular strain model, which now is elastoplastic, a trial step as elastic predictor is performed in order to check the yield condition \(F_H=0\). The relations were explicitly implemented within the substepping scheme and delivered for all cases numerical convergence. Details of numerical implementation of hypoplastic models can be found in [44]. Analysis of the performance of the model under monotonic loading is out of the scope of the present work, but some simulations of oedometric tests and undrained triaxial tests with monotonic loading for different densities are included in “Appendix E” and showed to capture fairly well the behavior. Similar simulations of monotonic loading can be also found in [48].
Before comparing the model with the experiments, we begin with a simple simulation of a drained triaxial test under constant mean pressure \(p=\) constant (such as by [36]). As mentioned before, this permits to evaluate the stress–dilatancy response under such conditions. The test is performed under \(p=100\) kPa (constant), with an initial void ratio of \(e_0=0.600\) (dense state). Three different simulations are presented in Fig. 6, where the variation of parameter \(c_z=\{0,100,300\}\) is considered. From the results, one may note that increasing values of \(c_z\) deliver a higher degradation of the shear stiffness accompanied with an increase of compressive volumetric strains, see Fig. 6.a, b and c. Hence, one may also calibrate \(c_z\) by trial and error through drained tests as an alternative. Figure 6.d presents the stress–dilatancy response within the space of q / p versus \(\dot{\varepsilon }_v/\dot{\varepsilon }_s\). The results show that the response of the model is bounded by two lines independently of parameter \(c_z\), as shown by experiments [5, 36, 53].

Simulation of a \(p=\) const triaxial test under drained conditions. Karlsruhe fine sand parameters. \(p_0=\) 100 kPa
Simulations of cyclic undrained triaxial tests with constant deviator stress amplitudes are shown in Fig. 7, while their pore pressure accumulation \(p^{acc}_w\) against the number of cycles is presented in Fig. 8. Three different tests with equal confining pressure \(p_0=200\) kPa but slightly different void ratios \(e=\{0.800,0.813,0.842\}\) were considered. The deviator stress amplitudes \(q^\mathrm{amp}\) are different on each test, and correspond to \(q^\mathrm{amp}=\{60, 50, 40\}\) kPa. The butterfly-shaped effective stress paths during the last cycles were satisfactorily simulated by the model while the pore pressure accumulation was also well captured. In Fig. 8, it is noted that the accumulation of the pore water pressure \({p}_w\) is successfully captured. The accumulation rate of the pore water pressure \(\dot{p}_w^{acc}\) gradually decreases, while it grows again on the last cycles. This effect was achieved due to the enhancement of the ISA-hypoplastic model proposed by Poblete et al. [35], whereby exponent \(\chi\) controlling the accumulation rate of \(p_w^{acc}\) changes gradually from \(\chi _0\) to \(\chi _\mathrm{max}\) to capture such effect (see Eqs. 34 and 35). The increase on the last cycles is captured due to the development of large strains, where exponent \(\chi\) is again reduced to \(\chi =\chi _0\), see Eq. 34. Details of this mechanism are found in [35].

Simulation of cyclic undrained triaxial tests with different deviator stress amplitudes in the q versus \(\varepsilon _1\) and q versus p space. Karlsruhe fine sand. a\(q^\mathrm{amp}=40\) kPa, b\(q^\mathrm{amp}=50\) kPa, c\(q^\mathrm{amp}=60\) kPa. Experiments by [48]

Simulation of cyclic undrained triaxial tests with different deviator stress amplitudes. Accumulation of pore water pressure. Karlsruhe fine sand. \(p_0=\) 200 kPa. Experiments by [48]
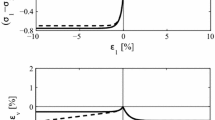
Lastly, we show some simulations of undrained triaxial tests with constant axial strain amplitude \(\varepsilon _1^\mathrm{amp}=0.01\). Considering that the strain amplitude is large, cyclic mobility effects are expected. Two different void ratios \(e_0\) were considered: the first with \(e_0=0.804\) and the second with \(e_0=0.698\). Experiments and simulations with \(c_z=0\) and \(c_z=300\) are shown in Figs. 9 and 10. Simulations without the proposed extension (\(c_z=0\)) show that the model is not able to reduce properly the mean pressure p under undrained cycles with large strain amplitudes (e.g., \(\varepsilon _1^\mathrm{amp}=0.01\)). Actually, for the dense case (\(e=0.698\) in Fig. 10), the mean pressure p increases for \(c_z=0\). The observed limitations are overcome when using the current extension (\(c_z=300\)).

Simulation of cyclic undrained triaxial test with variation of \(c_z\). \(c_z=0\) indicates the proposed model without cyclic mobility effects, whereas \(c_z=300\) implies simulation of this effect. Constant axial strain amplitude \(\varepsilon _1^\mathrm{amp}=0.01\) and void ratio of \(e_0=0.804\). Karlsruhe fine sand. \(p_0=\) 200 kPa. Experiments by [48]

Simulation of cyclic undrained triaxial test with variation of \(c_z\). \(c_z=0\) indicates the proposed model without cyclic mobility effects, whereas \(c_z=300\) implies simulation of this effect. Constant axial strain amplitude \(\varepsilon _1^\mathrm{amp}=0.01\) and void ratio of \(e=0.698\). Karlsruhe fine sand. \(p_0=\) 200 kPa. Experiments by [48]
5 Simulation example of an offshore monopile
We now present a simulation example of an offshore turbine–monopile system founded on a sand. The structure is subjected to environmental loads typical for an extreme storm event. The FE model is three-dimensional and has been built using the software Abaqus Standard. Its dimensions follow from the reference geometry NREL 5-MW established in [16] and are shown in Fig. 11. The structure is founded on a steel monopile embedded in an homogeneous sand, with an embedment length of \(L_p = 30\) m, diameter of \(D_p = 6\) m and wall thickness of \(t_p = 0.06\) m. The water depth above the mudline is of \(d = 20\) m. The tower height above the mean sea level (MSL) is 87.6 m, while the hub height is 90 m. Other important properties of the geometry and weights of the different parts of the model are given in Table 2.

Offshore wind turbine conceptual model and geometry

Main parts and mesh of the 3D finite element (FE) model
The discretized model is shown in Figs. 12 and 13. The FE model consists of six main parts, namely tower, substructure, monopile, soil inside the monopile, soil around the monopile and a surrounding part of soil with large finite elements to permit an appropriate numerical wave dissipation. The substructure has the same diameter and wall thickness as the monopile. In contrast, the tower presents a diameter and wall thickness which gradually reduces from 6 m at the base to 3.87 m at the top and from 0.027 m at the base to 0.019 m at the top, respectively. The foundation and the structure were modeled with four-node shell elements and the soil domain with eight-node brick elements and six-node wedge elements. The turbine rotor and nacelle were considered through lumped masses located at their corresponding centers of mass, see Table 2.

Geometry of the 3D finite element (FE) model
Rigid constraints were set between the monopile, substructure and tower to consider it as a continuum structure. The soil–monopile interface behavior was customized through a small sliding surface-to-surface interaction configuration. The frictional behavior was controlled using a penalty method with a coefficient of friction assumed as \(\mu = 0.3\). The normal behavior was controlled with a hard contact relation which allows any pressure to be transmitted between surfaces in contact.
The material used for the monopile and the structure was simulated through a linear elastic model representing the steel, with an elastic modulus of \(E = 210\) GPa and Poisson ratio of \(\nu = 0.3\). As recommended by Jonkman et al. [16], a density of 8500 kg/m\(^3\) was used in order to account for the weight of paint, bolts, welds and flanches. The material model for the soil corresponds to the extended ISA-hypoplastic model of the present work, calibrated for the Karlsruhe fine sand according to parameters in Table 1.
5.1 Description of loads
Offshore wind turbines are subjected to a combination of loads mainly caused by the action of wind and waves and the self-weight of the structure. Other type of loads acting on the structure is caused by currents, aerodynamic imbalances at the hub level and blade shadowing effects [3]. However, a simplified estimation of the environmental loads that only accounts for the wind and wave action is here adopted as shown in Fig. 14. The wind and wave loads are assumed as codirectional and are estimated considering the site conditions of the Colombian Caribbean Sea. Following the findings in [8], a typical extreme event in the Colombian Caribbean Sea for offshore applications could be defined by a surface wind speed at the height of 10 m above the mean sea level (\(U_\mathrm{10 m}\)) between 15 and 20 m/s, and a significant wave height with values between \(H_{s} > 3\) m for nearshore locations and \(H_{s} > 5\) m for other locations in the Caribbean Sea. For this work, the following environmental parameters were chosen: \(U_\mathrm{10 m} = 17\) m/s and \(H_{s} = 6\) m. In addition, the sea state was also defined by a wave spectral peak period of \(T_{p} = 8\) s [34]. These values are considered to be conservative and simulate a storm in the Colombian Caribbean Sea.

Loads applied on the structure
The wind thrust force \(F_\mathrm{wind}\) is calculated by applying the momentum theory to an idealized one-dimensional model of the wind turbine (see more details in [14]). Thus, the following relation results:
where \(\rho _{a} = 1.22\) kg/m\(^3\) is the density of the air, \(A_{r}\) is the rotor swept area of the NREL reference turbine [16], \(U_\mathrm{hub}\) is the wind speed at the hub level and \(C_T\) is a thrust coefficient, the latter defined later on. The wind speed \(U_\mathrm{hub}\) is estimated from \(U_\mathrm{10 m}\) using a logarithmic wind speed profile:
where U(z) is the wind speed located at height z, \(z_\mathrm{ref}\) is a reference height, which in this case is \(z_\mathrm{ref} =~10\) m, \(U(z_\mathrm{ref})\) = \(U_\mathrm{10 m}\) is the wind speed at the reference height, and \(z_0\) is the surface roughness length. For blown sea conditions, the value of \(z_0\) can be assumed as 0.0005 m [23]. Hence, following Eq. 14 the obtained wind speed at the hub level is \(U_\mathrm{hub} = 20.8\) m/s.
On the other hand, an approximate value of the thrust coefficient \(C_T\) may be computed as a function of the tip speed ratio (\(\lambda\)) [13, 41]. For the obtained value of \(U_\mathrm{hub}\), Jonkman et al. [16] report \(\lambda = 4\). From this, [13] gives \(C_T = 0.5\). Improved calibration of the factor \(C_T\) may be obtained through sophisticated aerodynamic simulations (see Example in [32]), but this is beyond the scope of the present work. Finally, the wind thrust force \(F_\mathrm{wind}\) is calculated using Eq. 13 and is plotted in Fig. 15 against time.
In addition, the hydrodynamic load is estimated using a simplified method proposed by [40, 42]. A calculation based on the Airy linear wave theory and the Morison equation [27] is used to obtain the inertial and drag components of the hydrodynamic force and overturning moment (Eqs. 15–18). The inertial components of the hydrodynamic force and overturning moment are denoted by \(F_\mathrm{wave}^I\) and \(M_\mathrm{wave}^I,\) respectively, while the drag components are denoted by \(F_\mathrm{wave}^D\) and \(M_\mathrm{wave}^D\), and read:
where \(\rho _w=1000\) kg / m\(^3\) is the water density, \(g=9.81\) m / s\(^2\) is the gravitational acceleration, \(H_s=6\) m is the significant wave height, \(C_m\) and \(C_d\) are the inertia and drag coefficients, and k is the wave number. The latter can be determined by iterative procedures using the relation \(\omega ^2=g k\tanh (kd)\), where \(\omega =2\pi f_s\) is the wave circular frequency and \(f_s = 1/T_p\). The values for the inertia and drag coefficients are assumed as \(C_m=1.6\) and \(C_d=0.65,\) respectively, following the recommendations in [2]. The total wave force \(F_\mathrm{wave}\) and moment \(M_\mathrm{wave}\) acting on the structure read:
Finally, the equivalent hydrodynamic loading is incorporated in the FE problem by applying \(F_\mathrm{wave}(t)\) at an elevation of \(M_\mathrm{wave}/F_\mathrm{wave}\) above the MSL. \(F_\mathrm{wave}\) is plotted against time in Fig. 15.

Time histories of the wind and wave loading
5.2 Analysis steps and initial conditions
The numerical simulation was performed through two analysis steps. In the first step, a geostatic equilibrium of the initial stresses was achieved assuming oedometric conditions. The vertical displacements were restricted on the bottom boundary as well as the horizontal displacements on the lateral boundaries. Thus, the initial stresses on the soil domain and pore pressure distribution are generated due to the self-weight of the model components and the hydrostatic pressure on the top surface. In the second step, the wind and wave time histories were applied on the structure under dynamic conditions. The total step time is 20 s with time increments of \(\Delta t=0.01\) s.
The initial conditions for the vertical stresses \(\sigma _{33}\) were computed using a saturated soil density of \(\rho _{sat} = 1800\) kg/m\(^3\) and considering an additional surcharge load equivalent to a 1 m column of soil to give numerical stability. The lateral earth pressure coefficient was set to \(K_0 \approx 1-\sin \varphi _c=0.461,\) and the horizontal initial stresses were obtained as \(\sigma _{11} = \sigma _{22} = K_0 \sigma _{33}\). Since the material is fully saturated, the initial pore pressure distribution corresponds to a hydrostatic state assuming a water intrinsic density of \(\rho _w=1000\) kg/m\(^3\) and a 20 m water column above the mudline. Further on, the simulation is performed under undrained conditions, i.e., the pore water pressure \(p_w\) is obtained from Eq. 21, in which \(K_w~=~2.2~\times ~10^5\) kPa is the water intrinsic bulk modulus, e the void ratio and \(\varvec{\dot{\varepsilon }}\) the strain rate tensor.
Of course, one may improve simulations using coupled dynamic finite elements to consider consolidation effects, but this would increase the complexity of the model. The intergranular strain \(\mathbf {h}\) and back-intergranular strain tensors \(\mathbf {c}\) were initialized by setting them at their fully mobilized states pointing to the gravity direction, i.e., \(h_{33}=-R\) and \(c_{33}=-R/2\), where subindex 3 coincides with the vertical direction. The initial void ratio \(e=e_0\) follows the Bauer′s relation:
where \(r_0\) is an additional constant to control the initial density and parameters \(e_{c0}, h_s, n_B\) are found in Table 1. An initial density with \(r_0=0.85\) has been considered. This would simulate an initial relative density of \(D_r= 0.731\) at the pile toe (30 m depth) and of \(D_r= 0.649\) near the mudline.
5.3 FE model results
Contours showing only zones with very low mean (effective) stress \(p<\) 3 kPa, close to the liquefaction state \(p\approx 0\), are plotted in Fig. 16. These contours correspond to the frame at the end of the simulations. For comparison purposes, two simulations have been analyzed: the first with \(c_z=0\) (no cyclic mobility extension) and the second with \(c_z=300\) (with cyclic mobility). The zone depicted in Fig. 16 corresponds to a section perpendicular to the wind and wave loads direction. The condition \(p<\) 3 kPa would, in principle, be met on the superficial soil. However, since the FE model considers surcharge load of 20 kPa at the ground surface to represent a small column of superficial soil, the condition \(p< 3~\mathrm kPa\) shows only the zones with reduced mean stress \(p<3\) kPa below the superficial soil. As expected, one may note that a larger zone with \(p<3\) kPa is exhibited by the model considering cyclic mobility (\(c_z=300\)).
To gain insight about the results, plots of the development of the mean pressure p with time t, and shear stress \(\sigma _{23}\) versus mean pressure p are depicted in Fig. 17. They present the results of a point A, adjacent to the monopile at 4.8 m below the mudline, see sketch of the point position in Fig. 17. The results indicate that the reduction of the mean stress p is larger when considering cyclic mobility (\(c_z=300\)). Notice that the effect of the cyclic mobility is evident after a time of 5 s.

FE simulation results. Liquefaction zones detected with \(p<3\) kPa. a\(c_z=0\), b\(c_z=300\)

FE simulation results at point A (z = 4.8 m). a time history of the mean pressure p. b stress path: shear stress \(\sigma _{23}\) versus mean pressure p
6 Final remarks
An extension to an ISA-hypoplastic model for sands has been proposed to account for cyclic mobility effects. As by other models [1, 6, 21, 33, 39], the model is now able to reduce drastically the effective mean pressure by undrained cyclic loading. The mechanism to detect cyclic mobility paths was similar as in other works, but the way to account for this information on the constitutive model was different: contractant behavior on cyclic mobility paths was captured by modifying the pyknotropy and batotropy factors from the hypoplastic model denoted by \(f_e\) and \(f_b\). In this way, the capabilities of the model related to the correct simulation of the stress–dilatancy ratio under drained tests were maintained. The current modification requires the calibration of two additional parameters, which may be found by trial and error from a limited number of cyclic triaxial tests. Some simulation examples with cyclic undrained triaxial tests showed that the model captures well the cyclic mobility effect. In addition, a dynamic FE simulation of an offshore monopile subjected to environmental cyclic loading, showed that the new extension provides larger areas of reduced mean stress (\(p<3\) kPa) than the former model for same conditions.
Notes
On the other hand, Wu and Niemunis [52] showed that the direction of tensor \(\mathbf {m}=-(\mathsf{L}^\mathrm{hyp})^{-1}:\mathbf {N}^\mathrm{hyp}\) coincides with the one of the accumulated strain under a closed infinitesimal stress cycle, which may be interpreted by some authors as a hypoplastic flow rule [11, 29, 52]. However, one may also show that its resulting dilatancy surface described by the condition \(m_{ii}=0\) coincides with the critical state surface, which does not depend on the void ratio and therefore disagrees with experiments, see “Appendix D”
References
Andrianopoulos K, Papadimitriou A, Bouckovalas G (2010) Bounding surface plasticity model for the seismic liquefaction analysis of geostructures. Soil Dyn Earthq Eng 30(10):895–911
API (American Petroleum Institute) (2014) Recommended practice for planning, designing and constructing fixed offshore platforms: working stress design. American Petroleum Institute, Washington
Arany L, Bhattacharya S, Macdonald J, Hogan SJ (2017) Design of monopiles for offshore wind turbines in 10 steps. Soil Dyn Earthq Eng 92:126–152
Boulanger R, Ziotopoulou K (2012) Pm4sand (version 2): a sand plasticity model for earthquake engineering applications. Technical report, University of California, Center for geotechnical modeling department of civil and environmental engineering, Davis, California, USA
Chang CS, Yin Z-Y (2010) Modeling stress-dilatancy for sand under compression and extension loading conditions. J Eng Mech 136(6):777–786
Dafalias Y, Manzari M (2004) Simple plasticity sand model accounting for fabric change effects. J Eng Mech ASCE 130(6):634–662
Das A, Bajpai P (2018) A hypo-plastic approach for evaluating railway ballast degradation. Acta Geotechnica 13(5):1085–1102
Devis-Morales A, Montoya-Sánchez RA, Bernal G, Osorio AF (2017) Assessment of extreme wind and waves in the Colombian Caribbean Sea for offshore applications. Appl Ocean Res 69:10–26
Fuentes W (2014) Contributions in mechanical modelling of fill materials. Schriftenreihe des Institutes für Bodenmechanik und Felsmechanik des Karlsruher Institut für Technologie, Heft 179
Fuentes W, Tafili M, Triantafyllidis T (2018) An isa-plasticity-based model for viscous and non-viscous clays. Acta Geotechnica 13(2):367–386
Fuentes W, Triantafyllidis T (2015) ISA model: A constitutive model for soils with yield surface in the intergranular strain space. Int J Numer Anal Meth Geomech 39(11):1235–1254
Fuentes W, Triantafyllidis T, Lascarro C (2017) Evaluating the performance of an isa-hypoplasticity constitutive model on problems with repetitive loading. In: Triantafyllidis T (ed) Holistic simulation of geotechnical installation processes, volume 82 lecture notes in applied and computational mechanics. Springer, Berlin, pp 341–362
Gasch R, Twele J (eds) (2012) Calculation of performance characteristics and partial load behaviour, chapter 6. Springer, Berlin, pp 208–256
Hansen MOL (2008) 1D momentum theory for an ideal wind turbine, chapter 4. Earthscan Publications Ltd, London, pp 27–40
Herle I, Kolymbas D (2004) Hypoplasticity for soils with low friction angles. Comput Geotech 31(5):365–373
Jonkman J, Butterfield S, Musial W, Scott G (February 2009) Definition of a 5-mw reference wind turbine for offshore system development. Technical report, National Renewable Energy Laboratory (NREL)
Kolymbas D (1991) Computer-aided design of constitutive laws. Int J Numer Anal Methods Geomech 8(15):593–604
Kolymbas D, Herle I (2005) Hypoplasticity as a constitutive framework for granular soils. In: ASCE, pp 257–289
Kuhn MR, Renken HE, Mixsell AD, Kramer SL (2014) Investigation of cyclic liquefaction with discrete element simulations. J Geotech Geoenviron Eng 140(12):04014075
Lade P, Ibsen L (1997) A study of the phase transformation and the characteristic lines of sand behaviour. geotechnical engineering group. Published In: Proceedings of international symposium on deformation and progressive failure in geomechanics, Nagoya, Japan, pp 353–359
LeBlanc C, Hededal O, Ibsen LB (2008) A modified critical state two-surface plasticity model for sand—theory and implementation. Technical report, Aalborg University, Department of Civil Engineering Water and Soil, Denmark
Li X, Dafalias Y (2000) Dilatancy for cohesionless soils. Géotechnique 50(4):449–460
Manwell JF, McGowan JG, Rogers AL (2009) Wind characteristics and resources, chapter 2. Wiley, Hoboken, pp 23–90
Masin D (2005) A hypoplastic constitutive model for clays. Int J Numer Anal Methods Geomech 29(4):311–336
Masin D, Herle I (2005) State boundary surface of a hypoplastic model for clays. Comput Geotech 32(6):400–410
Matsuoka H, Nakai T (1977) Stress-strain relationship of soil based on the SMP. In: Proceedings of speciality session 9, IX international conference on soil mechanics found Engineering, Tokyo, pp 153–162
Morison JR, Johnson JW, Schaaf SA (1950) The force exerted by surface waves on piles. J Pet Technol 2:149–154
Ng T, Dobry R (1994) Numerical simulations of monotonic and cyclic loading of granular soil. J Geotech Eng 120(2):388–403
Niemunis A (2003) Extended hypoplastic models for soils. Habilitation, Schriftenreihe des Institutes für Grundbau und Bodenmechanil der Ruhr-Universit”at Bochum, Germany, Heft 34
Niemunis A, Grandas C, Wichtmann T (2016) Peak stress obliquity in drained and undrained sands. Simulations with neohypoplasticity. Springer International Publishing, Cham, pp 85–114
Niemunis A, Herle I (1997) Hypoplastic model for cohesionless soils with elastic strain range. Mech Cohes Frict Mater 2(4):279–299
NRELs National Wind Technology Center (2018) Nrel 5-mw reference turbine - cp, cq, ct coefficients. https://wind.nrel.gov/forum/wind/viewtopic.php?f=2&t=582
Oka F, Kimoto S (2018) A cyclic elastoplastic constitutive model and effect of non-associativity on the response of liquefiable sandy soils. Acta Geotechnica 13(6):1283–1297
Osorio AF, Montoya RD, Ortiz JC, Peláez D (2016) Construction of synthetic ocean wave series along the colombian caribbean coast: a wave climate analysis. Appl Ocean Res 56:119–131
Poblete M, Fuentes W, Triantafyllidis T (2016) On the simulation of multidimensional cyclic loading with intergranular strain. Acta Geotechnica 11(6):1263–1285
Pradhan T, Tatsuoka F, Sato Y (1989) Experimental stress-dilatancy relations of sand subjected to cyclic loading. Soils Found 29(1):45–64
Sitharam TG, Dinesh SV (2003) Numerical simulation of liquefaction behaviour of granular materials using discrete element method. J Earth Syst Sci 112(3):479
Sitharam TG (2003) Discrete element modelling of cyclic behaviour of granular materials. Geotech Geol Eng 21(4):297–329
Taiebat M, Jeremic B, Dafalias Y, Kaynia A, Cheng Z (2010) Propagation of seismic waves through liquefied soils. Soil Dyn Earthq Eng 30:236–257
van der Tempel J (2006) Design of support structures for offshore wind turbines. PhD thesis, Delft University of Technology, Delft, Netherlands
Villalobos Jara FA (2006) Model testing of foundations for offshore wind turbines. PhD thesis, Oxford University, UK, United Kingdom
Vugts JH, van der Tempel J, Schrama EA (2001) Hydrodynamic loading on monotower support structures for preliminary design. In: Proceedings of special topic conference on offshore wind energy, Brussels, Belgium
Wang R, Fu P, Zhang J, Dafalias Y (2016) Dem study of fabric features governing undrained post-liquefaction shear deformation of sand. Acta Geotechnica 11(6):1321–1337
Wang S, Wei W, Peng C, He X, Cui D (2018) Numerical integration and FE implementation of a hypoplastic constitutive model. Acta Geotechnica 13(6):1265–1281
Wegener D, Herle I (2014) Prediction of permanent soil deformations due to cyclic shearing with a hypoplastic constitutive model. Geotechnik 37(2):113–122
Weifner T, Kolymbas D (2007) A hypoplastic model for clay and sand. Acta Geotechnica 2(2):103–112
Wichtmann T, Triantafyllidis T (2014) Stiffness and damping of clean quartz sand with various grain-size distribution curves. J Geotech Geoenviron Eng 140(3):1–4
Wichtmann T, Triantafyllidis T (2016) An experimental database for the development, calibration and verification of constitutive models for sand with focus to cyclic loading: part i–tests with monotonic loading and stress cycles. Acta Geotechnica 11(4):739–761
Wolffersdorff A (1996) A hypoplastic relation for granular materials with a predefined limit state surface. Mech Cohes Frict Mater 1(3):251–271
Wu W (1992) Hypoplastizität als mathematisches modell zum mechanischen Verhalten von Böden und Schöttstoffen. Phd thesis, Universität Karlsruhe, Germany. Institut für Boden- und Felsmechanik, Habilitation, Heft 129
Wu W, Bauer E (1994) A simple hypoplastic constitutive model for sand. International Journal for Numerical and Analytical Methods in Geomechanics 18(12):833–862
Wu W, Niemunis A (1996) Failure criterion, flow rule and dissipation function derived from hypoplasticity. Mechanics of Cohesive-Frictional Materials 1(2):145–163
Yin Z-Y, Chang CS (2011) Stress-dilatancy behavior for sand under loading and unloading conditions. International Journal for Numerical and Analytical Methods in Geomechanics 37(8):855–870
Acknowledgements
The authors appreciate the financial support given by COLCIENCIAS (Colombia) for the project with code 1215748-59323 from the convocation 748-2016, and the one given by the Bolivar Department (Colombia) and administered by CeiBA, through the scholarship “Bolivar wins with science”.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Notation and conventions
The notation and convention of the present work is as follows: Italic fonts denote scalar magnitudes (e.g., a, b), bold lowercase letters denote vectors (e.g., \(\mathbf {a}, \mathbf {b}\)), bold capital letters denote second-rank tensors (e.g., \(\mathbf {A}\), \({\varvec{\sigma }}\)), and special fonts are used for fourth-rank tensors (e.g., \(\mathsf{E}, \mathsf{L}\)). Indicial notation can be used to represent components of tensors (e.g., \(A_{ij}\)), and their operations follow the Einstein’s summation convention. The Kronecker delta symbol is represented by \(\delta _{ij}\), i.e., \(\delta _{ij}=1\) when \(i=j\) and \(\delta _{ij}=0\) otherwise. The symbol \(\mathbf {1}\) denotes the Kronecker delta tensor (\(1_{ij}=\delta _{ij}\)). The unit fourth-rank tensor for symmetric tensors is denoted by \(\mathsf{I}\), where \(\mathsf{I}_{ijkl}=\frac{1}{2}\left( \delta _{ik}\delta _{jl}\right.\)\(\left. +\delta _{il}\delta _{jk}\right)\). Multiplication with two dummy indices (double contraction) is denoted with a colon “ : ” (e.g., \(\mathbf {A}:\mathbf {B}=A_{ij}B_{ij}\)). The symbol “\(\otimes\)” represents the dyadic product (e.g., \(\mathbf {A}\otimes \mathbf {B}=A_{ij}B_{kl}\)). The brackets \(\parallel \bigsqcup \parallel\) extract the Euclidean norm (e.g., \(\parallel \mathbf {A}\parallel =\sqrt{A_{ij}A_{ij}}\)). Normalized tensors are denoted by \(\overrightarrow{\bigsqcup }=\frac{\bigsqcup }{\parallel \bigsqcup \parallel }\), or in general as \(\sqcup ^{\rightarrow }\). The superscript \(\bigsqcup ^\mathrm{dev}\) extracts the deviatoric part of a tensor (e.g., \(\mathbf {A}^\mathrm{dev}=\mathbf {A}-\frac{1}{3}(\mathrm {tr}\mathbf {A})\mathbf {1}\)). Components of the effective stress tensor \({\varvec{\sigma }}\) or strain tensor \({\varvec{\varepsilon }}\) in compression are negative. Roscoe variables are defined as \(p=-\sigma _{ii}/3\), \(q=\sqrt{\frac{3}{2}}\parallel {\varvec{\sigma }}^\mathrm{dev}\parallel\), \(\varepsilon _v=-\varepsilon _{ii}\) and \(\varepsilon _s=\sqrt{\frac{2}{3}}\parallel {\varvec{\varepsilon }}^\mathrm{dev}\parallel\). The stress ratio \(\eta\) is defined as \(\eta =q/p\). The deviator stress tensor is defined as \({\varvec{\sigma }}^\mathrm{dev}={\varvec{\sigma }}+p\,\mathbf {1}\) and the stress-ratio tensor with \(\mathbf {r}={\varvec{\sigma }}^\mathrm{dev}/p=\sqrt{\frac{2}{3}}\,\eta \,\overrightarrow{{{\varvec{\sigma }}^\mathrm{dev}}}\).
Empirical relation for shear degradation curve by Wichtmann and Triantafyllidis [47]
The empirical relation provided by Wichtmann and Triantafyllidis [47] is:
with the relative density \(D_r=(e_\mathrm{max}-e)/(e_\mathrm{max}-e_\mathrm{min})\) and the reference stress \(p_\mathrm{atm}=100\) kPa. For Karlsruhe fine sand \(e_\mathrm{max}=1.054\) and \(e_\mathrm{min}=0.677\). The secant shear modulus \(G_\mathrm{sec}\) is computed with the empirical relation provided by Wichtmann and Triantafyllidis [47] :
where \(\Delta \gamma\) is the shear strain amplitude, \(a=1.070\ln (c_u)\) is a constant, \(\gamma _r=\tau _\mathrm{max}/G_\mathrm{max}\) is the reference strain, \(\tau _\mathrm{max}=p\sin (\varphi _p)\) is the maximum shear stress and \(\varphi _p=34^\circ \exp (0.27D_r^{1.8})\) is the peak friction angle. \(c_u\) is the uniformity coefficient (\(c_u=D_{60}/D_{10}\)). For Karlsruhe fine sand, \(c_u=1.5\) and therefore \(a=0.433\).
For drained triaxial conditions, the strain amplitude \(\parallel \Delta {\varvec{\varepsilon }}\parallel\) is computed with the following approximation \(\parallel \Delta {\varvec{\varepsilon }}\parallel =\sqrt{(\Delta \varepsilon _1)^2(1+2\nu ^2)}\) where \(\nu\) is the Poisson ratio. For same conditions, it can be shown that the relation \(\Delta \gamma =\Delta \varepsilon _1(1+\nu )\) holds. For the computations with Karlsruhe fine sand, a value of \(\nu =0.3\) was used.
The resulting parameters for \(e_0=0.85\) and \(p=200\) kPa are \(\gamma _r=9.29\times 10^{-4}\), \(G_\mathrm{max}=130058\) kPa. For \(e_0=0.85\) and \(p=300\) kPa are \(\gamma _r=1.14\times 10^{-3}\) and \(G_\mathrm{max}=158002\) kPa.
ISA-hypoplastic model for sands
“Appendix C” presents a summary of the constitutive equations of the ISA-hypoplastic model. Details of the equations below are found in [11, 35, 49].
where \(\mathsf{L}^\mathrm{hyp}\) and \(\mathbf {N}^\mathrm{hyp}\) are the (fourth rank) linear and (second rank) nonlinear stiffness, respectively, \(\mathbf {N}=(\mathbf {h}-\mathbf {c})^{\rightarrow }\) is the IS flow rule, \(m_R\) is a parameter, and \(\rho\), m, \(\chi\) and \(F_H\) are scalar functions defined in the sequel. The IS yield surface function \(F_H\) is defined as:
where \(\mathbf {h}\) is the IS tensor, \(\mathbf {c}\) is the back-IS tensor, and R is a parameter. Factors m, \(y_h\) and \(\rho\) are defined as:
The evolution equation for the IS tensor \(\mathbf {h}\) is:
where \(\dot{\lambda }_H\) is the plastic multiplier of the IS model. The evolution equation for tensor \(\mathbf {c}\) is:
where \(\beta _h\) is a factor, which takes the value of \(\beta _h=\beta _\mathrm{hmax}\) for the condition \(\mid \overrightarrow{\mathbf {h}_b}:\overrightarrow{\mathbf {d}_b}\mid =0\), and \(\beta _h=\beta _{h0}\) for \(\mid \overrightarrow{\mathbf {h}_b}:\overrightarrow{\mathbf {d}_b}\mid =1\).
The internal variable \(\dot{\varepsilon }_\mathrm{acc}\) evolves according to:
Function \(\chi\) is defined as:
The equations of the reference hypoplastic model by Wolffersdorff [49] are given below:
The set of parameters are \(\varphi _c\), \(h_s\), \(n_B\), \(e_{i0}\), \(e_{c0}\), \(e_{d0}\), \(\alpha\), \(\beta\), R, \(\chi _0\), \(\chi _\mathrm{max}\), \(\beta _{h0}\), \(\beta _\mathrm{hmax}\), \(c_a\). The state variables are e, \(\mathbf {c}\), \(\mathbf {h}\) and \(\varepsilon _\mathrm{acc}\).
Inspection of hypoplastic flow rule tensor \(\mathbf {m}\)
Substitution of Eqs. 36 and 37 in tensor \(\mathbf {m}=-(\mathsf{L}^\mathrm{hyp})^{-1}:\mathbf {N}^\mathrm{hyp}\) gives (see procedure in [29]):
Splitting tensor \(\mathbf {m}\) into volumetric and deviatoric components \(\mathbf {m}^\mathrm{vol}=\mathsf{I}^\mathrm{vol}:\mathbf {m}\) and \(\mathbf {m}^\mathrm{dev}=\mathsf{I}^\mathrm{dev}:\mathbf {m}\), where \(I^\mathrm{vol}_{ijkl}=1/3\delta _{ij}\delta _{kl}\) and \(I^\mathrm{dev}_{ijkl}=I_{ijkl}-I^\mathrm{vol}_{ijkl}\) gives:
Where fuction \(f_\sigma\) is defined as:
Simulations of monotonic loading
In this “Appendix”, some simulations of the Karlsruhe fine sand under monotonic loading are presented. Simulations versus experiments are shown in Figs. 18 and 19. Parameters of Table 1 were used for the simulations.

Simulation of oedometer compression with one cycle unloading–reloading with different initial void ratios

Simulation of undrained triaxial tests with different initial void ratios
Rights and permissions
About this article

Cite this article
Fuentes, W., Wichtmann, T., Gil, M. et al. ISA-Hypoplasticity accounting for cyclic mobility effects for liquefaction analysis. Acta Geotech. 15, 1513–1531 (2020). https://doi.org/10.1007/s11440-019-00846-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11440-019-00846-2