
Abstract
Wireless sensor networks (WSNs) have grown excessively due to their various applications and low installation cost. In WSN, the main concern is to reduce energy consumption among nodes while maintaining timely and reliable data forwarding. However, most of the existing energy aware routing protocols incur unbalanced energy consumption, which results in inefficient load balancing and compromised network lifetime. Therefore, the main target of this research paper is to present adaptive energy aware cluster-based routing (AECR) protocol for improving energy conservation and data delivery performance. Our proposed AECR protocol differs from other energy efficient routing schemes in some aspects. Firstly, it generates balance sized clusters based on nodes distribution and avoids random clusters formation. Secondly, it optimizes both intra-cluster and inter-cluster routing paths for improving data delivery performance while balancing data traffic on constructed forwarding routes and at the end, in order to reduce the excessive energy consumption and improving load distribution, the role of Cluster Head (CH) is shifted dynamically among nodes by exploit of network conditions. Simulation results demonstrate that AECR protocol outperforms state of the art in terms of various performance metrics.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
In recent decades, WSN usually operates in the wide range of unreliable environments, which comprises of a huge number of tiny and low powered sensor nodes [1–3] that have sensing, processing and communication components. These nodes are randomly deployed in monitoring area and operate in a self-organized mode with the abilities to structure the network in an ad-hoc manner. Sensor nodes are typically disposable and expected to last until their energy drains. Therefore, energy is a very scarce resource and has to be managed wisely for prolonging network lifetime [4, 5]. In addition, to reduce the transmission power independently on each node, proper resource allocation should be adopted for improving overall network performance [6]. Due to restricted resources and dynamic nature of sensor nodes, conventional routing approaches are not appropriate for sensor based networks thereby it becomes a demanding task to design a related protocol for such a distributed environment [7, 8].
In order to deal with network scalability and energy efficiency, clustering approaches gained more attention among researchers and may be categorized either in centralized or distributed methods. Moreover, based on uniform time scheduling, sensor nodes switches between active and resting states on periodic interval [9]. In general, the working operations of cluster based network are divided into two main phases i.e. clusters formation and data transmission. Firstly, sensor nodes are grouped into multi-level non overlapping regions called clusters and each cluster has one leader node called CH. Secondly, all member nodes sense their target area and send data packets to associated CH, which performs several functions and further forwards the aggregated data towards Base Station (BS) via single-hop or multi-hop communication model [10]. Recently, several applications of sensor based network require data gathering towards end points with minimum delay and high delivery ratio [11–13]. In addition, most of the existing schemes do not optimize end-to-end route discovery which results in high communication cost and energy consumption over network field. Accordingly, data dissemination in WSN raises a challenging issue due to constrained resources on the part of sensor nodes [14, 15].
Consequently, utilizing non-optimized routing schemes lead to early energy depletion among nodes, and constructs longer paths which results in more re-transmissions and route breakages. In large scaled network, upon increasing in nodes density results in high network congestions and latency [16]. Moreover, nodes proximate to BS consumes energy resource rapidly due to their responsibility of high data forwarding. Eventually, this causes hot spot problem and degrades route lifetime. In such cases, high energy consumption and low packet delivery ratio might lead to inappropriate outcomes that potentially offset the aim of existing data transmission schemes. Although, many proposed schemes for energy constraint networks [17–19] emphasizes on minimizing the communication overheads and energy depletion, however, improving data delivery performance with efficient load balancing among nodes are unable to prevent completely [20–22].
In this paper, we present an adaptive energy aware cluster-based routing protocol for WSNs, aims to improve network lifetime and data delivery performance with minimum overheads. Unlike the majority of existing work, our proposed protocol improves energy conservation and routing information in some facets. In the first phase, based on network size, the entire sensor field is divided into balance sized clusters. Next, based on weighted score, optimized nodes are selected as the set of CHs within the bounded region thereby decreases network overheads and energy consumption. In the second phase, multi-hop routing paths are discovered at both intra-cluster and inter-clusters levels that shorten the transmission distance, improved energy conversation with reliable data forwarding in entire network field. Finally, at the end, to improve the network connectivity, the role of CHs is rotated among competitive nodes on demand basis.
The remainder of this paper is structured as follows. Section 2 presents the related work. Section 3 describes the detail of our proposed protocol. Section 4 illustrates the simualtion setup and performance results to evaluate the proposed protocol against existing solutions. At the end, Sect. 5 concludes the paper and suggests future direction.
2 Related work
Unlike other ad hoc networks, WSNs are typically characterized by restricted resources on the part of sensor nodes. During data gathering and forwarding process, the limited energy at each node impacts on network lifetime. In order to optimize the tradeoff between energy consumption and data delivery performance, appropriate architecture is required to determine the set of optimal routes for data dissemination and decreases excessive energy consumption among nodes [23, 24].
LEACH [25] the first dynamic cluster based routing approach for WSN and uses the stochastic process to select the nodes as CHs. Random number is generated by every node n and it will be elected as CH if random number is smaller than threshold T n value as shown in Eq. (1).
P shows the required percentage of clusters, r is current round, G is the set of nodes that have been not selected as CHs in last 1/p rounds. Although, LEACH improved energy efficiency by arranging the nodes in the form of clusters, however, randomly selection of CHs causes uneven energy consumption and decreasing network lifetime.
Power efficient gathering in sensor information systems (PEGASIS) [26] proposed greedy approach to form a chain from farthest node to closest node towards BS. Each node transmits and receives data from its neighbours and takes a turn being a leader for transmission towards the destination. Only one node at a time can send the data to a destination and closest node towards BS is elected as chain leader. PEGASIS significantly improved energy conservation by adopting multi-hop communication among nodes. However, incurs high transmission delay with an increase in network size. Moreover, PEGASIS leads to routing hole problem if any node dies during data gathering.
LEACH with distance-based thresholds (LEACH-DT) is a distributed and customized version of LEACH [27], aims to modify the probability of CH election by incorporating distance factor. During data transmission, source CH broadcasts ADV message and based on least distance, the next-hop is elected. In this way, the shortest multi-hop route is accomplished towards BS. LEACH-DT improved network lifetime as compared to conventional LEACH protocol, nevertheless, the number of clusters is not uniformly distributed over the network field. In addition, the routing paths are non-optimized which results in high re-transmissions and further energy consumption among nodes.
In [28], researchers proposed compressed data aggregation for energy efficient WSN. The target of this approach is to apply compressed sensing in multi-hop communication. Firstly, the existing approach minimizes energy consumption via joint data routing and compressed information aggregation. Secondly, they gave two solution techniques to deal with optimal and near-optimal data aggregation trees. In addition, [29] presents Hierarchical Data Aggregation using Compressive Sensing (HDACS), which exploits network hierarchical configuration with compression sensing. The key idea behind the proposed approach is to set the multiple thresholds according to cluster sizes at a different level of the data aggregation tree for reducing the amount of data dissemination. However, as nodes density increases, such approaches incur a lot of messages exchanging and additional overheads for construction and maintenance of data forwarding trees. Moreover, optimal network partition is overlooked that may lead to unnecessary energy consumption.
Link-aware clustering mechanism (LCM) [18] aims to achieve energy efficient routing for WSNs. The major idea behind proposed scheme is to determine energy efficient and reliable data forwarding paths. LCM utilizes node status and link quality factors to compute PTX value for candidates of CH. In addition, to determine the link quality for data forwarding, LCM uses bi-directional estimated transmission count (ETX) metric. LCM improved network lifetime and reduced network latency, nevertheless, optimized route discovery was not utilized during intra-cluster communication, which leads to additional energy consumption among member nodes because of one-hop data forwarding. Besides, LCM periodically performs re-clustering that generates excessive network overheads and communication cost.
Energy efficient data gathering based on grid chain (EEGDG) [30] aims to reduce transmission energy and communication overheads. EEGDG divides the entire network field into sub-areas and considering the single area as a cluster with unique area code. EEGDG chooses single node as grid node (GN) for the purpose of data gathering and its role is assigned randomly by turns. Next, GNs are arranged in a form of routing chains and data is forwarded to adjacent GN in the manner of hop by hop. EEGDG significantly improved routing performance, however, as network size increases the length of routing chain is also increasing, which results in higher data latency. In addition, when any node in routing chain dies, leads to a high number of re-transmissions.
3 Proposed adaptive energy aware cluster-based routing protocol
This section gives a brief overview of proposed AECR protocol and the detail of its components is presented in subsequent sections. During network initialization process, BS divides the entire network field into consistent sized square partitions based on nodes distribution. The major aim behind such virtual partitions is to balance the stability of clusters structure while minimum network overheads. Moreover, network partitioning based on nodes distribution achieves efficient load balancing and contributes to network lifetime.
Based on nodes density and their geographical positions, AECR protocol generates distinct clusters that remain fixed throughout the network life cycle. Accordingly, reduces clustering overheads and communication cost by avoiding frequently re-clusters formation. In addition, to cause fewer computational overheads and improving energy conservation, AECR initiates the CH election mechanism within the boundary of clusters based on composite metrics.
Next, the generated clusters by AECR protocol are used by route discovery component to determine potential data forwarding nodes over routing paths. In this stage, optimized relay nodes are determined that guaranteed shortest, most energy efficient and reliable routing paths. Consequently, significant improvement is made in network connectivity and data delivery performance. Moreover, instead of performing periodical CHs re-election mechanism that leads to excessive energy consumption and network overheads, AECR protocol dynamically commence the re-election mechanism based on network conditions. The operational flow of proposed AECR protocol is illustrated in Fig. 1. As an incorporated outcome of all the three main components of AECR protocol contribute to network lifetime and data delivery performance in the following aspects.

Operational flow of proposed AECR protocol
-
Firstly, it avoids generating sub-optimal clusters that lead to imbalance energy consumption among nodes and compromised network lifetime.
-
Secondly, appropriate set of intermediate nodes are determined to construct optimized data forwarding routes with least communication cost and balanced load distribution.
-
At the end, as CHs are focal points within the range of their clusters, they deplete their energy quickly as compared to member nodes. Consequently, by exploiting network conditions, the role of CHs are rotated among nodes rather than periodically re-clustering which results in reducing excessive energy consumption and network overheads.
3.1 Network model
Before describing the proposed AECR protocol, it is valuable to highlight the various assumptions of network field. We assumed the following network characteristics that are made about network model.
-
Sensor nodes are randomly and densely deployed in the two-dimensional geographical area.
-
Sensor network contains homogenous nodes in terms of resources and after deployment, all nodes remain static.
-
Each sensor node is location aware either by GPS or position algorithm.
-
Nodes can adjust their transmission power based on receiver distance and sense data at a fixed interval.
-
Compare to sensor nodes, BS is rich in resources and has a long range radio transceiver that covering entire network field.
3.2 Network partitioning
Most of the existing schemes result in unbalanced clusters formation in terms of cluster size and number of clusters that lead to compromised network lifetime. In order to improve clusters formation, AECR protocol formulates the virtual network partitioning based on nodes distribution. In addition, the phase of constructing the virtual partitions occurs only once in whole network life span. At network initialization, BS broadcasts control information that contains its ID and position coordinates (x, y). Upon receiving control information by proximate nodes (one-hop) around BS, they store the control information details in their routing tables.
After receiving the control information, packet counter is incremented by 1 and further broadcast to neighbors. However, a node might receive information from multiple sources, in such a case routes with least hop count towards BS are preferred and recorded in the routing table. In this way, every node i update its routing table by choosing the next-hop j for the selected route.
After setup the routing tables, each node sends its position information via next-hop and this process continues till BS has a global knowledge of entire network field. When localization phase is completed, based on node density (n) that need to be clustered and an optimum number of clusters (p) as being used in different clustering based schemes [31, 32], BS dissects the entire network field into a number of square sized virtual partitions by using Eq. (2), where k is considered as a squared number. Accordingly, unlike static network partitioning, where a number of clusters are predefined, AECR protocol dynamically adjusts the number of clusters based on network size.
In addition, the majority of the existing works initially select CH randomly thereby resulting in sub-optimal clusters that incur energy consumption in an unbalanced manner. Such unbalanced energy depletion potentially offsets the benefits of clustering and, therefore, compromising network lifetime. After the construction of virtual infrastructure, AECR protocol segments the nodes into geographically based clusters. To initiate the clusters formation, BS computes a centre point (c p ) for each virtual partition k i based on the positions of nodes located within the virtual partition. Afterwards, according to received node’s location and the computed set of c p values, for each virtual partition BS generates a cluster of the set of nodes which are relatively closer to its centre point. In addition, BS assigns each cluster a unique CLUS_ID. This procedure is continued until all nodes are grouped into non-overlapping k clusters. The main aim behind such clustering mechanism is to uniformly distribute nodes among clusters and achieve optimal load balancing. In addition, the chances of two immediate nodes to be selected as CHs are avoided by AECR protocol.
The procedure of network partitioning into balance sized clusters is governed by Algorithm 1.

After rationing the network structure into balance sized non-overlapping clusters, AECR protocol initiates the process CH election with each cluster region. CH being a central point and over loaded with abundant data traffic, it’s appropriate selection performs a critical role for improving network lifetime. Most of existing CH election mechanisms generates extra communication overheads as they execute the election mechanism over the entire network field, which results in electing non-uniformly distributed CHs i.e. might be located at the boundary of network field. Unlike existing schemes, AECR protocol localized the election process among each cluster members. The basic aim behind AECR protocol is to determine the only limited number of nodes for participating in CH election mechanism thereby results in lower energy consumption and communication overheads.
The process of CH election executes in distributed manner and utilizes weighted metric that takes into account of node’s residual energy, distance and adjacencies factors as shown in Eq. (3). In election mechanism, the node that optimizes the weighted metric is considered as a suitable candidate to be selected as CH.
\(\alpha ,\beta ,\gamma\) are the weighted factors for remaining energy, distance and number of adjacencies respectively. The weights \(\alpha ,\beta ,\gamma\) are assigned in such a way that \(\alpha + \beta + \gamma = 1\) whereas \(0 \le \alpha \le 1,\quad 0 \le \beta \le 1,\quad 0 \le \gamma \le 1\). The proposed CH election mechanism imposes least computational overheads, as nodes require only local information to compute their weights.
Firstly, each node determines its distance dist i towards centroid of cluster by using Euclidean distance formula as shown in Eq. (4). Thus, shorter the distance implies that node is relatively closer towards mid-point of cluster and has higher chance to be chosen as CH. Secondly, each node keeps track of its energy status, thus the nodes with sufficient energy resources are considered for CHs selection. Thirdly, all nodes maintain a neighbor table for keeping their adjacencies information with other nodes within the cluster. Thus node with higher number of connections represents its optimal position inside the cluster where several nodes are dispersed. Once the distance, residual energy and adjacencies are determined; these values are summed up in weighted manner to estimate the score for CH selection, as shown in Eq. (3). At last, the nodes with least distance to centre point, with most energy reserves and highest number of neighborhood adjacencies are potential candidates to be elected as CHs.
Next, each selected CH floods its local cluster by sending an ADV message. The message comprises of elected CH identity (ID), its geographical position and CLUS_ID in which it resides. Member nodes upon receiving the message further forwards it among their neighbors till all the nodes in the cluster are informed about CH position. The ADV message is ignored by nodes if their cluster ID is different. Afterwards, based on a number of member nodes within the each cluster, associated CH schedules the transmission period into fixed time slots. In order to save the energy constraint among nodes, the radio transmission power of each node is turned to switch off except its data dissemination process. Algorithm 2 governs the CHs selection and nodes association mechanisms.

3.3 Dynamic routes discovery
In large scaled WSNs, data routing is one of the main issue due to limited resources on the part of sensor nodes. Moreover, the random and dynamic structure of network topology leads to unbalanced traffic distribution among nodes and decreases data delivery performance. AECR protocol supports to improve tradeoff between energy consumption and data delivery performance over the entire network field. In addition, AECR protocol provides optimal data forwarding routes for both intra-cluster and inter-clusters levels thereby results in improved network lifetime and throughput.
After the completion of clusters formation by exploiting network partitioning algorithm, the next phase is to establish adjacencies among neighbor clusters. BS broadcasts route discovery packet that comprises of ID and location information. Nodes upon receiving such beacon message record the information and inform their respective CHs via neighbor node with least hop count. Furthermore to share the BS-discovery information with other CHs, the host CH floods its cluster till the BS discovery-packet is received by nodes along the boundary of the cluster. Nodes along the boundary of cluster send the BS discovery-packet to those neighboring nodes which belong to other clusters. Accordingly those boundary nodes whose cluster-ID is different from the host CH inform their respective CHs. This process continues till all the CHs receive the BS discovery-packet. During this process, the CHs also establish a reverse path back to BS that is used for subsequent inter-clusters data communication. Figure 2 illustrates the association among neighbor clusters after the network partitioning.

Association among neighbor clusters
Subsequently, AECR protocol commences the neighbor discovery process among the member nodes to determine nearly optimal intra-cluster data routing paths. To achieve intra-cluster route discovery, each node floods HELLO packet among its cluster’s members. On getting a request packet, neighbors respond with their residual energy and position coordinates. Each node constructs a local table that comprises of energy and distance of all its neighbors. In addition, each node calculates ETT value by using Eq. (5) by utilizing expected transmission count (ETX), the size of the packet (S) and link capacity (B). Each communication link with neighbors is given a weight based on its calculated ETT value. The given weight is recorded in the constructed local table by a source node. In order to reduce communication cost, the procedure of constructing local table occurs only once at the beginning of data transmission phase and updates when needed.
When initialization process is over, each node has sufficient information to calculate the forwarder score (FS) of its neighbors that will be exploiting as a selection criterion for the selection of next-hop during data transmission. On determining the neighbor’s FS value, each source node selects an appropriate neighbor with the highest FS value as its next-hop. Subsequently, source node unicasts route request (RREQ) message towards the selected next-hop. On reception of RREQ message, the selected next-hop first verifies whether the destination node is among its neighbors. In the case of finding a match, selected current node sets the next-hop flag directly towards the destination. Otherwise, the current node will select a new appropriate next-hop based on computed FS values and further unicasts RREQ message. This procedure continues until a multi-hop route is established towards associated CHs within clusters region.
On the other hand, CHs are highly consumed their battery power because of longer transmission distance towards BS. Thus, to decrease the excessive energy consumption during inter-clusters communication and improving data delivery performance, AECR protocol adopts multi-hop based hierarchical structures. BS floods its ID over the network field. On receiving the BS route discovery information, CHs that are the one-hop distance from BS send their ID’s toward BS with their default transmission power. Consequently, CHs with one-hop distance from BS are capable of direct transmission towards BS thereby constructing level-1 of the hierarchical structure. In order to keep on the formation of CHs hierarchical structure, CHs at level-1 further disseminate the information about BS and determine their next hop CHs. Upon reception of BS message from level-1, next-hop CHs form the level-2 and send their ID’s towards BS via level-1 CHs. This same practice is repeated until all undiscovered CHs become a part of the particular level of hierarchical structure based on hop count as shown in Fig. 3. It might happen that CHs receive multiple disseminated messages with different hop counts, in such case; the minimum hop-count is elected as an upper level for data routing. In this manner, multi-hop routes towards BS are constructed that are utilized for consequent data transmission. The main aim behind construction of hierarchical structure is to decrease the transmission power of appointed CHs while data transmission towards BS. Accordingly, data packets from lower levels can be forwarded towards BS over parallel paths across the different levels that improve data delivery performance and give the fair distribution of energy consumption over the entire network field.

Hierarchical structure among different clusters based on levels
Once, all the declared CHs are structured into different levels, the following set of rules are imposed on CHs while data forwarding.
Rule 1 On receiving the data packets, if BS is positioned at the next-hop of source CH then aggregated sensory data will be transmitted directly to BS.
Rule 2 During data transmission process, CHs at a lower level are not allowed to directly forward data towards BS. Instead, they have to use upper level CHs for data forwarding. In this manner, every downstream CH consumes less transmission power while delivering data.
Rule 3 It might be a case that there are multiple CHs in the upper level, candidate CHs is identified by comparing their residual energy to a certain threshold. Afterwards, the ETT value of candidate CHs is computed, and finally, CH with the lowest ETT value is elected as next-hop.
3.4 Cluster head re-election mechanism
CH being a central point in clusters management and continuously performing a role in routes re-adjustment are exposed to high energy consumption thereby its role should be shifted in network field. AECR protocol keeps track of residual energy of elected CH for ensuring that it does not fall down a certain threshold. Upon reaching the threshold, the elected CH changes its next-hop flag to false and quit from relaying data. In addition, it initiates a re-election process within the region of clusters.
Current CH computes a threshold distance (Dthreshold) by exploiting its own distance from the centre of the cluster and floods the region bounded by Dthreshold requesting the nodes to respond with their residual energy and distance. Nodes that are positioned at the threshold distance, respond to CH with their residual energy and distance. In addition, nodes that are located within the Dthreshold further forward the CH’s request with their neighbors till it is discarded by nodes outside the threshold distance. If current CH does not receive any response from its member nodes within the predefined time interval (Δt), it assumes that no qualifying nodes can be found within the computed Dthreshold and accordingly gradually increases the Dthreshold to expand the search zone.
In re-election process, the residual energy of qualified nodes is given high priority as compare to their distance from the centre of the cluster. Among candidate nodes those nodes are identified whose residual energy is greater than the threshold and then elects a relatively nearest node towards the centre of a cluster as a new CH. Subsequently, the new appointed CH floods its cluster by sending ID and position information in order to update the transmission schedule and nodes association. Accordingly, all the member nodes transmit their sensory data towards a newly selected CH. AECR protocol localized the CH rotating process within the restricted region that greatly decreases overheads in re-election process. Algorithm 3 is used to carry out optimized route discovery and re-election mechanism of CHs.

4 Simulation model and performance analysis
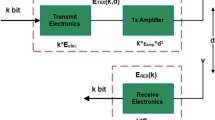
In this section, the performance of AECR protocol is evaluated via simulation experiments with respect to varying nodes density and data generation interval. In this regard, we used NS-2.35 [33] and compare the results of AECR protocol based on different performance metrics against existing schemes. We considered the squared size network field of 100 × 100 m2 dimension and nodes are randomly deployed. The transmission range of all nodes is set to 25 m. Initially, nodes are given 2 J of energy and remain static in network lifetime. We run the simulation for 1000 s and time interval for each round is set to 20 s. To expose more balanced contribution, the weighting factors are set to uniform values (\(\alpha = \beta = \gamma = 0.33\), whereas \(\alpha + \beta + \gamma = 1\)). We considered the energy model as being adapted in [25, 34]. Assume that d is a distance between two nodes i and j. The energy consumption during transmitting and receiving k data bits is shown in Eqs. (6) and (7).
\(E_{elect}\) is per bit energy dissipation during sending and receiving. The amplifier’s energy consumption is shown by \(E_{fs} *d^{2}\) or \(E_{fs} *d^{4}\) which is selected on the basis distance from source to destination. Distance threshold is given by \(d_{t}\), if \(d \le d_{t}\) then free space model is used else multi-hop fading model is employed. Table 1 shows the summary of the all simulation parameters.
4.1 Simulation results
The subsequent sections illustrate the performance evaluation of AECR protocol against LEACH-DT, LCM, and EEGDG schemes. We used five different criteria under same network dynamics to measure the performance of AECR protocol against existing work: network lifetime, average energy consumption, network throughput, network delay and packet delivery ratio. The network lifetime is measured in seconds and termed as time elapsed after the dispersion of nodes in sensor field till the first node dies because of energy consumption. Average energy consumption in measured in joules and determines how much energy is being depleted by nodes during network operations. Network throughput measures the aggregated data rate in Kbit/s towards destination over the entire network field. The network latency determines an end to end delay in seconds while receiving of data packets from source nodes. The data delivery ratio measures the percentage of successful data packets that are obtained at end points.
4.1.1 Impact of varying nodes density
In this section, we assess the performance of our AECR protocol with respect to a different number of nodes. Network size is varied from 50 to 300 nodes to accomplish result analysis in a dynamic and scalable environment. Figure 4 illustrates the network lifetime of AECR protocol against existing schemes. Simulation experiment demonstrates that our AECR protocol improved network lifetime by 13, 22.5, and 29 % respectively. This is due to balanced size clusters generation and optimized CHs election mechanism within the cluster region instead of entire network field. Moreover, AECR protocol selects shortest, most energy efficient and reliable routing paths for data dissemination.

The impact of number of nodes on network lifetime
Figure 5 shows the average energy consumption at varying number of nodes. It is observed that AECR protocol extensively reduces the overall energy consumption by 12.5, 16, and 20.4 % respectively as compared to existing schemes. In particular, AECR initiates the CHs election mechanism in the restricted region which results in fewer computational and network overheads. In addition, using the set of data forwarding rules proposed by AECR, only limited number of CHs is selected for inter-cluster routes adjustment process that significantly reduced the overall network energy consumption.

Impact of number of nodes on average energy consumption
Figure 6 depicts the network throughput as a function of varying number of nodes. It is seen that throughput produced by AECR protocol is 11.9, 20.7, and 23.3 % higher than existing schemes. Existing schemes highly reduce the achievable network throughput due to low flexibility against nodes failure, which results in lower overall network performance. On the other hand, AECR protocol improved network throughput for both intra-cluster and inter-clusters transmission by electing the longer lifetime routes for data forwarding. The utilization of multi-hop routes within intra-cluster and inter-clusters not only reduces the transmission distance and saves energy, but also supports parallel data forwarding that leads to increasing data delivery performance.

The impact of number of nodes on network throughput
Figure 7 demonstrates average end-to-end delay under varying network sizes. AECR protocol achieved lower average end-to-end delay by 16.9, 22.8, and 25 % respectively as compared to existing schemes. Existing schemes exhibit a higher end-to-end delay in data forwarding because of constructing non optimized routing paths. Consequently, such schemes incur higher routes failure probability and re-transmissions. Moreover, AECR protocol constructs the routing paths for both intra-cluster and inter-cluster communication based on composite criteria, which reduces the possibility of routes instability.

The impact of number of nodes on network delay
Figure 8 depicts the packet delivery ratio with respect to varying nodes density. It is seen that packet delivery ratio produced by AECR is 13.8, 17, and 19.5 % higher than existing schemes. Unlike existing schemes that determine non-optimized routing paths that lead to frequently route breakages and incur high data lose ratio. On the other, AECR incorporates multi-facet routing function for data forwarding at both intra-cluster and inter-clusters level. The exploitation of such multi-hop routing paths optimizes the selection of data forwarder nodes in terms of distance, energy and link quality metrics which significantly reduces packets drop ratio.

The impact of number of nodes on packet delivery ratio
4.1.2 Impact of varying data generation interval
In this section, to analyze the impact of different data generation interval on AECR protocol against existing work, numerous simulation experiments are conducted. During experiments, in order to determine the reliability of routing performance, the data generation intervals are varying from 5 to 30 s.
Figure 9 presents network lifetime with respect to different data generation interval. Obviously, employing longer data generation interval reduces network traffic and increases network lifetime. AECR protocol improved network lifetime by 11.5, 16.6 and 20.5 % correspondingly as compared to existing schemes. This is due to avoiding random clusters formation and based on network size the number of clusters is generated. In addition, the role of CHs is rotated dynamically among specified search zone rather than re-clustering the entire network field, which contributes to balanced energy consumption among nodes and increases network lifetime.

Vaying data generation interval versus network lifetime
In terms of energy consumption against different data generation intervals, AECR protocol improved the performance by 9, 12, and 13.8 % respectively as illustrated in Fig. 10. The reason for consuming less energy by AECR protocol is to achieve efficient load distribution among clusters and localized the CHs election mechanism within the boundary of clusters. In addition, utilizing the hierarchical structure of appointed CHs for inter-clusters routing contributes to a reduction in energy consumption among nodes. Moreover, instead of direct transmission within clusters, multi-hop routes are constructed based on composite factors which notably decrease overall energy consumption among member nodes.

Vaying data generation interval versus average energy consumption
Figure 11 demonstrates the outcome of varying data generation interval on network throughput. In fact, higher data generation interval results in less network traffic and congestion, which leads to increasing data delivery performance. It is seen that AECR protocol improved network throughput by 11.6, 14, and 17.8 % respectively as compared to existing work. The reason behind this to exploiting multi-hop optimized routing paths at both intra-cluster and inter-clusters levels. Moreover, considering energy consumption in discovering of routing paths increases the reliability of such routes. In addition, link quality metric decreases the number of re-transmissions which has a critical effect on network throughput.

Varying data generation interval versus network throughput
Figure 12 depicts the average end-to-end delay during different data generation intervals. Observably, higher generation intervals result in less data traffic which reduces network congestion and end-to-end delay. AECR protocol decreases the network delay by 23, 29.7, and 34 % respectively as compared to existing schemes. This is due to the construction of more consistent routes in terms of energy level and link quality as compared to existing schemes. In addition, during routes construction, only that nodes are selected those shorten the data forwarding delay by minimizing re-transmissions while conserving energy resources of nodes.

Vaying data generation interval versus network delay
Figure 13 illustrates the outcome of different data generation intervals on packet delivery ratio. Basically, higher data generation interval results in less traffic load and congestion that directs to increasing packet delivery performance. AECR improved the packet delivery ratio by 11, 14.7 and 19.1 % as compared to existing schemes. This is due to exploit of optimized multi-hop intra-cluster and inter-clusters data forwarding routes. Moreover, by taking into account of energy and link quality factors while determining of routing paths increases the reliability of such routes as nodes have sufficient energy with better link condition are selected as intermediate nodes.

Vaying data generation interval versus packet delivery ratio
5 Conclusion
In this research paper, AECR protocol structures the dispersed sensor nodes into uniform sized non-overlapping clusters based on network size. Consequently, random clusters formation is avoided and the role of CHs is distributed evenly over the entire network field. In addition, by adopting weighted metrics for CH election process within each cluster region leads to least computational overheads and energy consumption. Moreover, AECR protocol discovers optimal multi-hop data delivery routes that achieve shortest, most energy efficient and reliable data transmissions. Furthermore, to balance the load distribution, AECR protocol shifts the role of CHs based on network conditions rather than performing re-clustering frequently. Experimental results demonstrate that AECR protocol significantly improved different evaluation metrics as compared to existing solutions. In future work, we will further analyze the performance of AECR protocol by considering heterogeneous data generation traffic.
References
Bhuiyan, M. Z. A., Wang, G., & Vasilakos, A. V. (2015). Local area prediction-based mobile target tracking in wireless sensor networks. Computers, IEEE Transactions on, 64(7), 1968–1982.
Jing, Q., Vasilakos, A. V., Wan, J., Lu, J., & Qiu, D. (2014). Security of the internet of things: perspectives and challenges. Wireless Networks, 20(8), 2481–2501.
Yang, M., Li, Y., Jin, D., Zeng, L., Wu, X., & Vasilakos, A. V. (2015). Software-defined and virtualized future mobile and wireless networks: A survey. Mobile Networks and Applications, 20(1), 4–18.
Sheng, Z., Yang, S., Yu, Y., Vasilakos, A., Mccann, J., & Leung, K. (2013). A survey on the ietf protocol suite for the internet of things: Standards, challenges, and opportunities. Wireless Communications, IEEE, 20(6), 91–98.
Song, Y., Liu, L., Ma, H., & Vasilakos, A. V. (2014). A biology-based algorithm to minimal exposure problem of wireless sensor networks. Network and Service Management, IEEE Transactions on, 11(3), 417–430.
Lopez-Perez, D., Chu, X., Vasilakos, A. V., & Claussen, H. (2014). Power minimization based resource allocation for interference mitigation in OFDMA femtocell networks. Selected Areas in Communications, IEEE Journal on, 32(2), 333–344.
Potdar, V., Sharif, A., & Chang, E. (2009). Wireless sensor networks: A survey. In Advanced information networking and applications workshops, 2009. WAINA’09. International conference bradford, 2009, IEEE, pp. 636–641.
Chilamkurti, N., Zeadally, S., Vasilakos, A., & Sharma, V. (2009). Cross-layer support for energy efficient routing in wireless sensor networks. Journal of Sensors, 2009, 134165. doi:10.1155/2009/134165.
Han, K., Luo, J., Liu, Y., & Vasilakos, A. V. (2013). Algorithm design for data communications in duty-cycled wireless sensor networks: A survey. Communications Magazine, IEEE, 51(7), 107–113.
Liu, Y., Xiong, N., Zhao, Y., Vasilakos, A. V., Gao, J., & Jia, Y. (2010). Multi-layer clustering routing algorithm for wireless vehicular sensor networks. Communications, IET, 4(7), 810–816.
Tsai, C.-H., & Tseng, Y.-C. (2012). A path-connected-cluster wireless sensor network and its formation, addressing, and routing protocols. Sensors Journal, IEEE, 12(6), 2135–2144.
Afsar, M. M., & Tayarani-N, M.-H. (2014). Clustering in sensor networks: A literature survey. Journal of Network and Computer Applications, 46, 198–226.
Zeng, Y., Xiang, K., Li, D., & Vasilakos, A. V. (2013). Directional routing and scheduling for green vehicular delay tolerant networks. Wireless Networks, 19(2), 161–173.
Vasilakos, A. V., Li, Z., Simon, G., & You, W. (2015). Information centric network: Research challenges and opportunities. Journal of Network and Computer Applications, 52, 1–10.
Zhu, N., & Vasilakos, A. V. (2016). A generic framework for energy evaluation on wireless sensor networks. Wireless Networks, 22(4), 1199–1220.
Busch, C., Kannan, R., & Vasilakos, A. V. (2012). Approximating congestion + dilation in networks via” quality of routing; games. Computers, IEEE Transactions on, 61(9), 1270–1283.
Xiao, Y., Peng, M., Gibson, J., Xie, G. G., Du, D.-Z., & Vasilakos, A. V. (2012). Tight performance bounds of multihop fair access for MAC protocols in wireless sensor networks and underwater sensor networks. Mobile Computing, IEEE Transactions on, 11(10), 1538–1554.
Xiong, N., Vasilakos, A. V., Yang, L. T., Song, L., Pan, Y., Kannan, R., et al. (2009). Comparative analysis of quality of service and memory usage for adaptive failure detectors in healthcare systems. Selected Areas in Communications, IEEE Journal on, 27(4), 495–509.
Yan, Z., Zhang, P., & Vasilakos, A. V. (2014). A survey on trust management for Internet of Things. Journal of Network and Computer Applications, 42, 120–134.
Dvir, A., & Vasilakos, A. V. (2011). Backpressure-based routing protocol for DTNs. ACM SIGCOMM Computer Communication Review, 41(4), 405–406.
Meng, T., Wu, F., Yang, Z., Chen, G., & Vasilakos, A. V. (2016). Spatial reusability-aware routing in multi-hop wireless networks. Computers, IEEE Transactions on, 65(1), 244–255.
Zhang, X. M., Zhang, Y., Yan, F., & Vasilakos, A. V. (2015). Interference-based topology control algorithm for delay-constrained mobile ad hoc networks. Mobile Computing, IEEE Transactions on, 14(4), 742–754.
Anastasi, G., Conti, M., Di Francesco, M., & Passarella, A. (2009). Energy conservation in wireless sensor networks: A survey. Ad Hoc Networks, 7(3), 537–568.
Zhou, L., Naixue, X., Shu, L., Vasilakos, A., & Yeo, S.-S. (2010). Context-aware middleware for multimedia
 services in heterogeneous networks. IEEE Intelligent Systems, 2010(99), 1–14.
Heinzelman, W. R., Chandrakasan, A., & Balakrishnan, H. Energy-efficient communication protocol for wireless micro sensor networks. In System sciences, 2000. Proceedings of the 33rd annual Hawaii international conference on, 2000, Vol. 12, IEEE, 10 pp.
Lindsey, S., & Raghavendra, C. S. PEGASIS: Power-efficient gathering in sensor information systems. In Aerospace conference proceedings, 2002. IEEE, 2002, (Vol. 3, pp. 3–1125–1123–1130 vol. 1123): IEEE.
Kang, S. H., & Nguyen, T. (2012). Distance based thresholds for cluster head selection in wireless sensor networks. Communications Letters, IEEE, 16(9), 1396–1399.
Xiang, L., Luo, J., & Vasilakos, A. Compressed data aggregation for energy efficient wireless sensor networks. In Sensor, mesh and ad hoc communications and networks (SECON), 2011 8th annual IEEE communications society conference on, 2011, IEEE, pp. 46–54.
Xu, X., Ansari, R., Khokhar, A., & Vasilakos, A. V. (2015). Hierarchical data aggregation using compressive sensing (HDACS) in WSNs. ACM Transactions on Sensor Networks (TOSN), 11(3), 45.
Huang, Y.-F., Yang, L.-C., & Lin, J.-Y. (2012). An efficient energy data gathering based on grid-chain for wireless sensor networks. In Awareness science and technology (iCAST), 2012 4th international conference, Seoul, 2012, IEEE, pp. 78–82.
Manjeshwar, A., & Agrawal, D. P. (2001). TEEN: A routing protocol for enhanced efficiency in wireless sensor networks. In IPDPS, 2001, Vol. 1, pp. 189.
Gou, H., Yoo, Y., & Zeng, H. (2009). A partition-based LEACH algorithm for wireless sensor networks. In Computer and information technology, 2009. CIT’09. Ninth IEEE international conference, Xiamen, 2009, Vol. 2, IEEE, pp. 40–45.
Issariyakul, T., & Hossain, E. (2012). An introduction to network simulator NS2. Berlin: Springer.
Guan, X., Guan, L., Wang, X. G., & Ohtsuki, T. (2010). A new load balancing and data collection algorithm for energy saving in wireless sensor networks. Telecommunication Systems, 45(4), 313–322.
Acknowledgments
We gratefully acknowledge the technical support and research facilities provided by the Universiti Teknologi Malaysia (UTM), without which this work could not have been completed.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Haseeb, K., Bakar, K.A., Abdullah, A.H. et al. Adaptive energy aware cluster-based routing protocol for wireless sensor networks. Wireless Netw 23, 1953–1966 (2017). https://doi.org/10.1007/s11276-016-1269-0
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11276-016-1269-0