
Abstract
Intelligent transportation system is a prominent technology solution for the vehicle manufacturers in this present scenario. The manufacturers are trying to deploy an advanced system for automation through sensing. Various technologies are being used to communicate with other near-by vehicle and to sense their perspective on the road. The important problem is to share the radar and communication information with other vehicles without any time delay. The vehicles uses a different hardware system for establishing radar sensing and communication concurrently, which increases the cost and bandwidth requirement of the overall system. Instead of using multiple system and hardware separately for communication and remote sensing, a single hybrid system might be a cost effective solution which will serve both communication and remote sensing requirements. This work proposes a concept for integrating radar sensing and hybrid communication system (IRSHCS) with multiple input multiple output (MIMO) orthogonal frequency division multiplexing (OFDM) in a single hardware known as software defined radio. It serves simultaneous remote sensing and communication to the vehicle user without delay with the dedicated short range communication system and worldwide interoperability for microwave access. Moreover, an optimization problem is formulated to improve the performance of IRSHCS, which focuses on sharing both the radar and communication between the vehicles without any time delay by satisfying the radar and communication system requirements with suitable parameters. The whale optimization algorithm generates an optimal solution to solve the limitations of the hybrid system by choosing maximum channel capacity as its objective function. Experimental results are evaluated to demonstrate the IRSHCS MIMO OFDM system provide better performance as compared to the conventional approaches.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
With the deployment of the technologies of wireless communications, the car manufactures furnished wireless devices to each vehicle, which allow vehicles to interface with other vehicles and also with the roadside infrastructure. This network is considered as a vehicular ad hoc network (VANET) that enhances safety [1]. Wireless communication play a significant role in ITSs [2]. ITS will combine the technologies, information, computers, and communications and bid them in the transportation field to construct a cohesive system of roads, people, and vehicles [3]. ITSs consists of cameras, sensors, inductive loops, radar, etc. But these are expensive due to hardware components and installation cost of cables and sensors [4]. ITSs increases the safety by reducing traffic accidents as well as it increases the usage of existing transportation networks [5]. ITSs decreases accidents in the road with the help of vehicle safety systems and it also increases the wireless communication requirements [6]. Integration of vehicular communication and remote sensing are more important for ITS applications such as detection of a vehicle, wireless communications, sensing technologies, etc. Nowadays, cars are furnished with communication devices and sensors with the technology of wireless communication [7]. Long term evolution (LTE) mobile communication technology has been applied in the vehicular networks, which provide high speed internet and well-defined quality of service (QoS) [8]. But, the interference occurred in this network cut down the performance of the LTE. The Millimeter wave transmission is applied to connect the users inside the vehicles. To face the challenges in the developing industry of communication, the reusable hardware is required to work with various protocols and standards at various times.
Software defined radio (SDR) is an advanced platform to enable a solution of the program based on baseband signal processing. Its importance on wireless communication is not restricted to the communication of mobile like Global System for Mobile Communication (GSM), Wideband Code Division Multiple Access (WCDMA), etc., but it also has other standards like worldwide interoperability for microwave access (WiMAX), dedicated short range communication system (DSRC), wireless LAN, etc. [9]. The three kinds of memory are necessary for this system includes Random Access Memory (RAM), flash memory, and Secure Digital (SD) card. The Gigabit Ethernet and USB 2.0 are the communication interfaces. With the port of Ethernet, the device could also be used like the network mode N210. That is, in the network mode, the application of radio (e.g., MATLAB) works on the computer. SDR provides the functionalities of radio like modulation, demodulation, processing of the signal, generation of signal and coding of a signal in software [10]. Also, it uses the front end structure, in which the analog signals are changed into digital signals [11].
ITSs supports both the short range communication and long range communication. The short range communication is capable of using DSRC and the long range communication is capable of using WiMax [12]. WiMax is of two kinds such as IEEE 802.16d, which is fixed WiMax based on OFDM and IEEE 802.16e which is mobile WiMax based on OFDM access. DSRC is IEEE 802.11p, which is based on OFDM [13]. DSRC is used for communications such as inter-vehicle and vehicle-to-roadside [14,15,16]. The application of DSRC is the ITSs, which improves the safety of the driver by exchanging information among the vehicles [17]. The approaches that are complemented by DSRC are the wireless fidelity (Wi-Fi), WiMax and the other communication protocols which provide the highest data rates for ITSs. The aim of DSRC is to provide safety applications that alert the vehicles for the traffic conditions and communication of safety messages from the roadside infrastructure. Each vehicle on the road has a mobile unit for communication purposes. Interference may occur because of more number of mobile units, and DSRC cannot have the capability to tackle the interferences. Mobile WiMax provides services such as telecommunication and high speed of mobile data. It provides efficient data that transfer between the users using a single Base Station (BS) with security [18]. Mobile WiMax is heavily used for mobile applications like handheld devices and in vehicular internet access. The OFDMA in mobile WiMax provides an easy system acquire to changing bandwidth configurations by maintaining the other parameters of the system constant [19, 20].
ITS is an emerging technology solutions for car manufacturer in this present scenario. Various car manufacturers are trying to deploy advanced system for pilot automation through sensing. Various technologies are available in market like optical sensor, RADAR sensor etc. Also various technologies are being used to communicate with other near-by vehicle and to sense their perspective as well on the road. It is also very important to share the RADAR sensing information with the other nearby vehicle instantaneously. Vehicle uses different hardware and system for establishing communication and sensing at the same time; which increases the cost and bandwidth requirement of the overall system. The usage of different hardware for establishing communication at the same time causes delay and it increases the utilization time of resources. Thus, instead of using multiple system and hardware separately for communication and remote sensing, and to overcome the drawbacks, a single hybrid system might be a cost effective solution which will serve both requirement—communication and remote sensing. This work proposes a concept to combine the communication and radar within a single communication system hardware; which serves simultaneous remote sensing also to the vehicle user. DSRC is proven technology for ITS. Also, study shows that the WiMAX technology is going to be a very useful technology to support DSRC in broader application scenario. WiMAX (IEEE 802.16e) with OFDM is being used to take advantage of multicarrier communication. Out of many multi-carrier channel, one dedicated WiMAX channel will be used for remote sensing purpose and all others will be used for communication.
1.1 Significant contributions of the paper are as follows
-
The hybrid DSRC/WiMAX communication technology provides an efficient data transfer with high level of security and it has a capability to tackle the interferences.
-
Hybrid Communication and remote sensing are used to sense the surrounding of the vehicles inorder to avoid collision without communication delay. Further, it improves the channel capacity.
-
The optimization problem is formulated to improve the performance of IRSHCS, which shares both the radar and communication between the vehicles without any time delay by satisfying the radar and communication system requirements with suitable parameters.
-
The proposed method uses a single SDR system for implementing the integrated radar and hybrid communication system in the vehicles. It reduces the cost and bandwidth of the overall system when the vehicle uses different hardware and system for establishing the radar and communication at the same time.
-
The hybrid DSRC/WiMAX technology is used for efficient communication based on the strength of the signal, which improves the packet delivery ratio, throughput and blocking probability.
The manuscript is structured as follows: Sect. 2 illustrates the recent related work based on the proposed work. Section 3 signifies the system model. Section 4 represents the proposed activities as IRHCS in SDR and optimization algorithm. Section 5 provides the result and analysis of the proposed technique. Finally, Sect. 6 concludes the work.
2 Related work
2.1 The recent works related to the proposed work are as follows
Wu et al. [21] dealt with VANET which have their own roles in ITSs. Some information had been maintained in vehicular networks to enable the distributed ITS without getting any support from the infrastructures like road side units. Authors introduced a protocol for storing the data in the vehicular network. The data was moved to a new carrier before the current data carrier was moved out of the particular region. The approaches based on the cluster increased the resource utilization efficiency of the wireless network. It had a limitation that it needed higher bandwidth to achieve efficiency in throughput and velocity.
Huang et al. [22] dealt with DSRC which provided wireless communication for the applications of ITSs. DSRC was used for reliable and short distance communication. Information sharing among cars, infrastructures, pedestrians or clouds increased safety and mobility. The authors analyzed the performance of DSRC using the data of the biggest connected vehicle test program from the world. They also focused on the maximum range and the ratio of packet delivery between the vehicles and road side units. But, it had a limitation in the vehicle, that the antenna location affected the range and Packet Delivery Ratio (PDR).
Vegni et al. [23] presented a hybrid communication model for vehicular networking in which the network provided the connectivity through V2V and vehicle to infrastructure (V2I) networking. A heterogeneous vehicular network was depicted in which the wireless networks cover the overlapping vehicular grid partially. Authors also analyzed the protocol switching model and how the vehicles forward messages. Based on the use of moving vehicles and the availability of the wireless network, the system provides the improved performance. But it gives better performance only if the parameters like delay and utilization time of resources are chosen appropriately.
Ali et al. [24] focused on Radio Access Technology (RAT), which had been investigated by vehicular networks. The information had been carried and distributed, inter communicates and of communicating with other units along the roadways. For effective communication in the network of vehicles, technologies such as LTE, cellular systems, DSRC, and WiMAX have been used. But the performance of the optimal RAT was better than the other technologies by reducing the beaconing frequency, even though the handover frequency was poor.
Kumari et al. [25] dealt with the technology of millimeter (mm) wave for the applications of radar. The authors also explored the use of WLAN in the mm wave and developed the Long Range automative Radar (LRR) and V2V jointly. The algorithms based on signal processing was used to perform the estimation of radar. The performance and the evaluation were accurate at high SNR. But, it had a limitation that it does not perform well at low SNR.
Sit et al. [26] presented a RadCom system with MIMO OFDM, which is the combination of radar and communication system. Both the process were achieved simultaneously with multiple RadCom nodes. Although the RadCom system supports hardware and technology, there are still research under process on the optimization of velocity, angular and range estimation for signal modeling.
Kumari et al. [27] formulated an integrated framework of V2V communication and the full duplex radar operation. Their proposed system allows hardware reuse. They developed single and multi-frame radar algorithms used for the estimation and target identification in the receiver side. Velocity and range estimation is accurate for low and normal Signal-to-Noise Ratio (SNR) but the Doppler shift estimation is not accurate.
Cohen et al. [28] unified the Cognitive Radio (CRo) communication and Cognitive Radar (CRr) to enable an interference free operation. The radar and communication system shared over a common spectrum. The unified CRoCRr system using Xampling (SpeCX) framework outcomes in spectral coexistence. During clutter and hostile jamming, the radar signal get contaminated.
Vehicle communication is an emerging system for ITS which provide communication between nearby vehicles to support internet access and efficient communication. However, connectivity disruptions in-vehicle communication may occur due to rapid changes in the topology network, vehicle speed and if the vehicles are in rare or completely disconnected scenarios. As a result, vehicles are not always able to communicate with each other and V2V is the most appropriate interconnection scheme for some applications. Intelligent Vehicle Communication defines a new way of using vehicular networks by integrating heterogeneous wireless technologies such as LTE, DSRC and WiMAX. The LTE technology reduces the beaconing frequency, even though the handover frequency was poor. The DSRC accepts only a short communication range. WiMAX can be used for long distance communications. Even though, these technologies have limitations that it need higher bandwidth for achieving higher efficiency in throughput and velocity. Also it provides better performance only if the parameters like delay and utilization time of resources are chosen appropriately.
On the other hand, vehicle users are also very concerned about their safety features. Few smart vehicles also take advantage of various remote sensing devices (RADAR, sensors) to analyze the surrounding of the vehicle to avoid a collision and other necessary features required during heavy traffic. Hence, Vehicle on move demands an efficient approach for both communication and remote sensing technology. So, we use a hybrid communication and remote sensing technology for an intelligent transportation system. The hybrid communication technology along with the Radar system provides efficient communication without collision in Intelligent Transportation system. Our research work successfully improved the performance of various communication on board using the hybrid communication system.
3 System model
Consider MIMO OFDM, the integrated radar sensing and communication system with the transmit antenna and receive antenna. \( s_{c} (t) \) and \( s_{ra} (t) \) are communication and radar signals and it can be integrated into \( s_{t} (t). \) The modulator, converter and channel are all equipped into the SDR. To reduce the cost and the bandwidth, instead of using separate hardware, SDR is used in the proposed system.
The transmitted signal is expressed as,
where \( N_{C} \) denotes the number of subcarriers, \( a_{n} \) denotes the weight coefficient, \( v_{n} (t) \) denotes the phase code envelope, \( f_{n} \) denotes the carrier frequency of the nth carrier and \( T_{s} \) denotes the duration of the completed OFDM symbol and it satisfies \( T_{s} = T + T_{g} \) with the cyclic prefix \( T_{g} \). The carrier frequency \( f_{n} \) can be expressed as,
where \( f_{c} \) denotes the center frequency and \( \Delta f \) is the subcarrier frequency spacing, and it can be expressed as,
which is the interval of the subcarrier with the OFDM symbol duration T.
After modulation, the obtained integrated signal is expressed as,
where \( d(n) \) is the deserialized digital sequence modulated in the nth sub-carrier.
The signal that can be added with the additive white Gaussian noise (AWGN) is expressed as,
where \( w(t) \) is the AWGN noise.
The signal that is received at the receiver side is expressed as,
It can be rewritten as,
where \( \tau \) represent the time delay.
Finally, the radar and communication signal is received in the form of,
Figure 1 shows the architecture for integrating radar and communication systems. In the transmission phase, the generated communication waveform is converted from serial to parallel. After that, both the communication and radar signal is modulated. The modulated signal is passed into Inverse Fast Fourier Transform (IFFT). IFFT converts the signal from the frequency to time and cyclic prefix is added to the signal. The guard interval is provided by the cyclic prefix which removes the inter symbol interference from the previous symbol. Then the digital signal is converted from digital to analog and it can be up converted into a radio frequency. Then in signal processing, problems can be solved by using the optimization algorithm.

Architecture for the integration of radar and communication
In the reception phase, the limitations of the integrated radar and communication waveform is solved. The radio frequency is down converted and the analog signal is changed into the digital signal. CP is removed from the signal in the reception phase. FFT converts the signal from the domain of time to frequency and the signal is demodulated. After demodulation, the parallel signal is transformed into serial and both the radar and communication signal is received at the side of the receiver.
Figure 2 shows IRSHCS V2V communication network flowchart. Vehicles share the radar and communication information via DSRC/WiMAX by checking the range frequency and bandwidth of the vehicle. The vehicle normally send the information through DSRC and if any range loss occurs, then DSRC is defined as being a Wi-Fi network and its range is only up to 1 km, then it can be sent through WiMAX. The whale optimization solves the limitations of the system that occurs while integrating both the radar and communication. In this algorithm, the iteration will continue until we get the satisfied result.

Flowchart of the proposed IRSHCS with optimization
4 Proposed integrated radar sensing and hybrid communication system (IRSHCS) MIMO OFDM with optimization
The RADAR and communication cannot be operated in time, space and code division multiplexing. But the RADAR and communication can be integrated using OFDM. It has high efficiency of a frequency spectrum, flexible multi-carrier modulation, easy synchronization, and equalization. The IRSHCS MIMO OFDM increases the capability of throughput, and SNR. A single hardware platform called SDR processes and run the base band signal processing requirement of IRHCS. It reduces the communication cost and the bandwidth. In IRHCS, both the RADAR and communication can be transmitted in a frame, in which one OFDM is for RADAR and all the other OFDM in the frame is for communication. The DSRC and WiMAX wireless networks can be allocated for the transmission based on the range (short/long), bandwidth and frequency of the system. Maximizing the channel capacity is the major objective function considered during the transmission of the radar and communication. So in IRSHCS, the radar and communication requirement can be satisfied with maximum channel capacity based on some constraint conditions (such as duty ratio, time delay, signal bandwidth, Doppler shift, and maximum unambiguity range (MUR). To solve the optimization constraints, an optimization algorithm called whale optimization algorithm (WOA) is used in our work. Optimizing the performance of radar and communication based on channel capacity is the most significant challenge of WOA.
4.1 Integrated radar sensing and hybrid communication system (IRSHCS)
In a vehicular network, consider a vehicle-to-vehicle communication network, which consists of vehicles, radio units, base station and software defined radio. For establishing communication and sensing at the same time in vehicles, different hardware and system can be used which increases the cost and the requirement of bandwidth for the overall system. Instead of separately using multiple system and hardware for communication and sensing, a single hybrid system might be a low cost and bandwidth requirement serves both communication and radar. This also increases the effectiveness of the overall platform, reliability, and maintainability. This work proposes the integrated communication and radar within a single system hardware as SDR.
Integrated radar sensing and communication, the design of system parameters meets the radar and communication requirement. The parameters of IRSHCS are duty ratio \( D \), signal bandwidth \( B_{\delta } = N_{c} \Delta f \), symbol bandwidth \( B_{s} = MN_{c} \Delta f \), pulse repetition frequency \( f_{r} \), center frequency \( f_{c} \), pulse duration \( T_{p} \), array element interspace \( d \), cyclic prefix length \( T_{g} \), subcarrier frequency spacing \( \Delta f = \frac{1}{T} \) with OFDM symbol duration \( T \) and time duration of completed OFDM symbol \( T_{s} \). c is the number of subcarriers engaged by each OFDM symbol and M is the total number of subcarrier frequencies.
4.1.1 Requirements of radar
-
1.
Doppler tolerance
The Doppler tolerance \( f_{dr} \) arises from the radial velocity between ISHCS. It is expressed as,
$$ f_{dr} = \frac{{2v_{r} c_{0} }}{{f_{c} }} $$(10)where \( v_{r} \) represents the radial velocity between the radar and target and \( c_{0} \) represents the speed of propagation. To maintain the subcarrier orthogonality, the maximum Doppler shift \( f_{{dr,{\mathrm{max}} }} \) must be far less than the subcarrier spacing \( \Delta f \). That is, \( \Delta f\, \ge 10f_{{dr,{\mathrm{max}} }} \).
-
2.
Maximum unambiguity range (MUR) and maximum unambiguity velocity (MUV)
Both the MUR \( R_{u} \) and MUV \( V_{u} \) are associated with PRF \( f_{r} \)
$$ R_{u} = \frac{{c_{0} }}{{2f_{r} }} $$(11)$$ V_{u} = \frac{{c_{0} f_{r} }}{{2f_{c} }}. $$(12) -
3.
Range resolution
Range resolution \( \Delta R \) is determined by the signal bandwidth
$$ \Delta R = \frac{{c_{0} }}{{2B_{s} }}. $$(13)Range resolution is increased by increasing the entire signal bandwidth.
4.1.2 Communication requirements
-
1.
Doppler tolerance
The Doppler shift \( f_{dc} \, \) is expressed as,
$$ f_{dc} = \frac{{v_{c} c_{0} }}{{f_{c} }} $$(14)where \( v_{c} \) represents the communication velocity. To maintain the orthogonality, \( f_{{dc,{\mathrm{max}} }} \) must be far less than the subcarrier spacing \( \Delta f \). That is, \( \Delta f\, \ge 10f_{{dc,{\mathrm{max}} }} \).
The CP length is no less than the maximum time delay \( \tau_{{{\mathrm{max}} }} \) of the communication channel. That is, \( T_{g} \ge \tau_{{{\mathrm{max}} }} \)
-
2.
Channel capacity
If antennas in the receiver and the AWGN channels are orthogonal, then the capacity can be written as,
$$ C_{t} = DMB_{\delta } \log_{2} \left( {1 + \delta \frac{{P_{t} }}{{N_{0} B_{\delta } }}} \right) $$(15)where \( P_{t} \) is the transmit power, \( N_{0} \) is the spatial power density of AWGN and \( \delta \) represent the propagation loss factor. The duty ratio \( D = \frac{{T_{p} }}{{T_{r} }} \) is less than unity because the integrated waveform is non-continuous. If D = 1, then the equation denotes the continuous waveform in the MIMO system with M transmit and receive antennas. Hence, the duty ratio can be interpreted as the capacity loss factor due to the discontinuity of waveform.
4.2 Optimization
An optimization goal is to maximize the channel capacity with minimum time by selecting the suitable requirements of radar sensing and communication. The multi-objective function is constructed as,
Ns subcarrier spacing, Nc number of subcarriers, Tg cyclic prefix, fr pulse repetition frequency, T symbol duration.
The multi-objective function considers the constraints such as, duty ratio, time delay, Doppler shift, and MUR. The following are the conditions for the given constraints:
-
(i)
Make certain the duty ratio to be less than the threshold \( D^{0} \)
$$ N_{s} (T_{g} + T)f_{r} \le D^{0} . $$(17) -
(ii)
The time delay should be less than the cyclic prefix in order to avoid interference
$$ \tau_{{{\mathrm{max}} }} \le T_{g} . $$(18) -
(iii)
Assure that the Doppler shift will not destroy the subcarrier orthogonality for both radar and communication
$$ \frac{1}{T} \ge 10{\mathrm{max}} \left\{ f_{{dr,{\mathrm{max}} }} ,f_{{dc,{\mathrm{max}} }} \right\} . $$(19) -
(iv)
MUR is greater than \( R_{u}^{0} \) for the surveillance of long range
$$ \frac{{c_{0} }}{{2f_{r} }} \ge R_{u}^{0} . $$(20)where \( C_{0} \) represents the speed of propagation, \( D^{0} \) and \( R_{u}^{0} \) are the parameters corresponding to duty ratio, and MUR.
To solve the above optimization problem, WOA [29] is used in the proposed work. A lot of nature inspired meta-heuristic optimization algorithm are emerged to reduce the optimization problem for integrating the communications and radar systems. The other meta-heuristic algorithms face several challenges while modelling and solving optimization problem. For the real time vehicular application, some of the optimization algorithms can’t tackle the clustering problems. While sensing and communicating information among vehicles, time delay with high channel capacity is important criteria. The other algorithms does not cluster the vehicle in a specific range. So the information can’t share with all vehicle users. Further, searching of optimal solution is important issue. Therefore, the proposed WOA provide better optimal solution for further processing. On comparing with the other methods, this algorithm solves different constrained or unconstrained optimization problems for real-time applications. In vehicular communication, it solves an extensive range of optimization problems by selecting the vehicles in a particular range based on clustering model.
-
(i)
Whale optimization algorithm
Whale optimization algorithm (WOA) is a nature inspired meta-heuristic optimization algorithm. WOA is based on the hunting behavior of humpback whales. Nature-inspired metaheuristic algorithms have been effective for optimization problems and help in find the optimal solution. Moreover, humpback whales have a unique hunting method called bubble net feeding method which usually involves creating bubbles along a circle around the prey while hovering around the prey. The WOA involves two phases: exploitation and exploration. Exploration refers to a global search for optimal solutions, whereas exploitation is related to local search. Exploitation consists of probing a constrained region of the search space with the hope of enhancing a good solution.
In WOA the hunting is analogous to optimization technique and the location of prey is analogous to the location of the best solution. In addition, the WOA algorithm starts with a randomly generated population of whales (solutions) each with the random position. In the first iteration, the search agents update their positions inference to a randomly chosen search agent. However, from second iteration onwards the search agents update their position with respect to the best solution obtained so far. A random search agent is chosen if the value of |A| > 1, this helps in exploration. When the best solution is selected, |A| is set to |A| < 1. This induces exploitation as all the search agents will converge. Therefore, WOA can be considered as a good global optimizer.
In our work, the objective is to share both the radar and communication signal between the vehicles (V2V) without any time delay by maximizing the channel capacity. WOA uses vehicles as a population to determine the global optimum and the process starts with ‘n’ number of vehicles and ‘t’ number of maximum iterations. The iteration can be improved until the integrated data shared efficiently between the vehicles. To share both the radar and communication signal between the vehicles, the requirements of both the radar and communication have to be selected and solved. The information is shared between the vehicles in a particular range. All the vehicles under the specific range can able to get the information, by considering the total number of vehicles in the system. When the number of vehicles varies along the time, the distributed WOA run periodically. For sharing the information optimally, the constraint conditions can be created to satisfy the requirements. The constraints are solved when the information is shared optimally, as the constraints are also created due to optimization problem. To reduce the time delay, the other vehicles update their information towards the best constraint solution after defining a best solution. Both the radar and communication have been shared the information without any time delay to the other vehicle using the WOA. If the information is shared among V2V network optimally, it includes applications such as collision warning and avoidance, optimum speed advisory, blind spot, lane change warnings, etc.
4.2.1 Proposed IRSHCS WOA algorithm
The proposed IRSHCS WOA consider on some constraint conditions such as, duty ratio, time delay, signal bandwidth, Doppler shift, and maximum unambiguity range (MUR). The proposed algorithm solves the above requirements with a maximum channel capacity. It involves four steps. The following are the steps of proposed IRSHCS WOA:
-
Step 1 Population initialization
The algorithm begins with the initialization of whale population (vehicle population) and certain parameters. Let B be the population that consists of k-number of solutions as in the following representation:
After initializing the population, two coefficient vectors A1 and A2 are also get initialized, which can be updated in the further steps.
-
Step 2 Fitness estimation
Once the population and the parameters are initialized, the solutions in the population are subjected to fitness evaluation. The fitness of the search agents (vehicles) is computed using Eq. (16) based on the constraints such as duty ratio, time delay, Doppler shift, and maximum unambiguity range (MUR) respectively, where duty ratio, and time delay are the communication constraints. Doppler shift, and maximum unambiguity range (MUR) are the radar constraints. The multi-objective function is constructed based on these constraints.
The position of the agents is unknown initially. Hence, the algorithm takes the solution that has the best fitness value obtained so far as the best search agent. Then, the update rule derived in the next step updates the position to find the best solution.
-
Step 3 Position update function
After assuming the best search agent initially, the position of the solution is updated. This requires distance estimation based on the vector A2 and the current best solution, as given below:
where \( B^{ * } (i) \) is the position of the current best solution and B(i) is the position vector at iteration i. The coefficient vectors A1 and A2 are computed based on two parameters as
where c is a parameter that reduces from 2 to 0 over the iterations and b is a constant that chooses a value randomly within the range [0, 1].
The position update, in the exploration phase, follows bubble-net attacking technique, which utilizes two schemes, shrinking and spiral updating mechanisms. In shrinking mechanism, when the value of c is reducing, the vector is set in a range, where the value varies from − 1 to 1, as given below:
where \( B^{ * } \left( i \right) \) is the best search agent obtained at iteration i, A1 is the vector and V is the distance measure. Meanwhile, a spiral equation is developed in the other technique based on the helix-shaped movement of the whales as,
Where q is a constant that represents the shape of the spiral, a is a random number in the interval [− 1, 1]. An equal probability is assumed in choosing the position vectors, i.e. when p < 0.5, the algorithm chooses the shrinking behaviour, whereas, the probability p ≥ 0.5 selects the other, here p denotes the random number in the range [0, 1].
V* is the distance between the positions of current best search agent and that of jth solution, as expressed below:
where (B* i) is the position of current best search agent at iteration and B (i) is that of the solution at the ith solution.
-
Step 4 Best search agent determination
After the updation of position, a new set of solution is generated by the WO algorithm for which the fitness values are evaluated using the same fitness function. The current best agent will be replaced by another solution that has the best fitness value. In the other case, the best solution will be the same. Finally, the iteration i will be incremented by one.
-
Step 5 Termination
The steps 2–4 is repeated iteratively for selecting the best solution until the termination is met. The condition to stop this proposed algorithm is given by setting max _iter. The procedure will be continued till i reaches the max _iter.
The proposed system defines a search space in the neighborhood of the best solution and allows other search vehicles to exploit the current best solution in the domain. The variation of the search vehicle vector allows the WOA algorithm to smoothly transit between exploration and exploitation without time delay with maximum channel capacity. As the vehicles varies with time, the WOA run non-periodically, without higher communication cost. The information is efficiently transmitted between exploration and exploitation phase, the requirements for the real-time applications such as collision warning and avoidance, optimum speed advisory, blind spot, lane change warnings, etc. can be full filled. Thus, it satisfy the vehicle requirements by solving the radar and communication constraints such as duty ratio, time delay, signal bandwidth, Doppler shift, and MUR.
Algorithm: Proposed ISHCS WOA algorithm | |
|---|---|
Begin Initialize the vehicle population Initialize a, A1 and A2 Calculate the fitness function of each vehicle Z* = the best solution Procedure WOA (population, a, A1, A2, MaxIter) Iter = 1 While iter <= MaxIter For each vehicle If (p < 0.5) If (|A1| <=1) Update the information of the current vehicle by the Eq. (25) Else if (|A1 >=1|) Select a random vehicle and update the information based on Eq. (27) End Else if (p >=0.5) Update the information of the current vehicle by the Eq. (26) End End End while |
4.3 Software defined radio (SDR)
The main intersection of smart antennas, digital signal processing, and software re-programmability is the SDR. “Software-defined radios can accommodate numerous waveform types within the basic capability of the RF components. This reduces the number of federated radios in a vehicle as long as simultaneous operation of all the waveforms is not required. The range of operational waveforms requires antennas with conflicting requirements of small size, wide bandwidth, polarization agility, and variable gain. All the radar and communication functionalities are under the control of SDR software and the waveforms are digitized at the antenna. The two functions can be carried out in turns by switching modes or concurrently through a special waveform, such as OFDM. SDR is applicable as multiband radar for accurate detection. For the multiband operation, the SDR concept provides strong advantages with respect to classical radars, due to the easy software implementation of all required hardware modules and the easier integration into a compact system of signal processing operations. The system can be configured with the sampling rate, signal converters in terms of bandwidth and carrier frequency. RF/IF modulator modulates the signals and a Field Programmable Gate Array (FPGA). The FPGA assists with the pulse time operation as well as perform the operations like up sampling/down sampling, match filtering and modulation.
To provide real-world data, the transmitted signal is modelled similarly to the DSRC/WiMAX standard, which is designed for vehicular environments. The standard uses the up to 60 GHz frequency range for communication. In the real world application, the vehicle position detected by DSRC/WiMAX and radar-detected objects. The final estimate (using the joint information) of the vehicle position is shown as a circle. This circle is larger when the two vehicles are closer to each other. Note that the vertical displacement of the vehicles is not estimated. The radar do not give accurate vertical information, and vertical positioning is unlikely to significantly interfere in collision detection. However, DSRC transmitters require electromagnetic waves to radiate uniformly in the horizontal plane. This is taking into account that vehicles move mostly in the horizontal plane. Thus, communication between them occurs mostly in the horizontal plane. In the case of communication between vehicles and road infrastructure a certain degree in elevation should be considered. Therefore, it is possible to achieve radar and communication characteristics in one hardware without compromising the system performance.
In Fig. 3, the system transmits a pulse signal, generates a range-Doppler map, encodes the range Doppler map on to digital communication waveforms as the next pulse train for radar sensing. The system acts as a communication receiver by equalizing and decoding the radar to reproduce the transmitted data. All range-Doppler and communication processing is implemented in MATLAB code and then the waveform of the SDR is updated. A host computer controls the waveform and settings of the SDR. The SDR consists of a DSP, FPGA, DACs, and ADCs. The Digital Signal Processor (DSP) provides hardware support for fixed point, 12 bit precision operations. The FPGA is inserted between the ADC and the processor. FPGA can assist with timing operations such as pulsing. It is also used to implement the operation such as up/down sampling, modulation etc. RF module modulates analog signals directly from baseband to a programmable carrier frequency.

Software defined radio (SDR)
5 Experimental results
Simulations are conducted on MATLAB under various scenarios to evaluate the performance of the proposed algorithm. SDR provides the functionalities of IRSHCS in software. Simulation results for the performance are presented in terms of the bit error rate (BER) and system capacity. The following tests are performed at the receiver side and transmitter side: Packet Error Rate, and Spectrum Quality. Also, the performance of the proposed scheme is measured by means of dropping probability, blocking probability, throughput, and received signal strength. The input parameter setting for the experimental analysis is represented below.
5.1 Simulation details
In this section, MATLAB simulations with 500 iterations is performed to evaluate the proposed communication and radar techniques against the required system specifications for SDR using parameter setting. The MATLAB is installed in the host computer present in SDR. This hardware is cost-effective, real-time platform for a range of communication. All the information’s are shared between every vehicles within a certain range because the vehicles which are in the certain range are interconnected between themselves. Using the combined WiMAX/DSRC system, we were able to test different configurations of the system, including the number of active connections, the ratio of uplink symbols to downlink symbols and the modulation and coding used for the data being sent. Proposed system’s percentage throughput improvement, and system throughput per user, respectively. To evaluate the benefits of our proposed system, we use number of vehicles as 25–150 with average speed of vehicles 10–100 km/h using data rate 54 Mbps. The Carrier frequency of 5.8 GHz with signal bandwidth of 2.500 MHz and time duration of OFDM symbol is 3.2 μs for 500 iterations. Then, the antenna is the smallest form factor and covers two wide frequency bands in the range of 5.9–66 GHz and 24–77 GHz for vehicular radar system designed antenna covers. These features make our antenna a very good candidate used for vehicular radar and wireless communications and may find applications in Vehicle to Vehicle (V2V), Vehicle to Infrastructure (V2I) and other applications.
Table 1 represents the parameters that are used for the IRHCS system in the V2V network. The system parameters have been chosen to satisfy both the radar and communication requirements. The IRHCS system has been simulated based on these parameters in the V2V communication network.
Table 2 represents the parameter setting of the hybrid DSRC/WiMAX communication in a V2V network. Both the DSRC and WiMAX is used for short and long range communication. The data rate, range and frequency varies for both DSRC and WiMAX [30] communication. If any signal loss occurs, DSRC communication is used and WiMAX is used if any range loss occurs in the system.
Figure 4 shows the SDR hardware setup for an integrated communication. Wireless open access research platform (WARP) v3 kit is the hardware, which integrates Xilinx Virtex-6 LX240T FPGA, programmable RF interfaces and many other peripherals. The FPFA is the central processing system for the WARP. The RF interfaces communicate at 2.4 GHZ and 2.5 GHz transceiver (40 MHZ RF bandwidth). For each RF interface, the digital values from FPGA are taken through 12-bit 170 MSps digital to analog converters for the transceiver and then the analog streams are taken from the transceiver to FPGA through 12-bit 100 MSps analog to digital converter with the dual band power amplifier (PA) (20 dBm transmit power). For MIMO applications, the interfaces share the reference clock as well as 2 gigabit Ethernet interfaces are used in this system. In the current state, the transmit bandwidth can be set to any value up to 25 MHz. The communication standard specifies bandwidths of 5.9 GHz or 66 GHz. Depending on the scenario, the signal bandwidth with 66 GHz with a FFT size of 64 and 52 active carries or 25 MHz with a FFT size of 25–150 active carriers. By varying these parameters, the measurements were used to both test the usability of the standard-conform signals as well as testing the efficiency of our setup. The software-defined radio which supports different transmit and receive in different frequency ranges. While most of the signal processing is done on the MIMO OFDM radar requires capturing the reflections while transmitting and therefore requires full duplex capabilities. This solves the problem of transmitting and receiving at the same time.

SDR—WARP v3 kit
Figure 5 shows the plot of the fitness function and the convergence rate of the WOA. The best score denotes the best solution that can be obtained in each iteration. In the graph, it can be given with 500 iterations. The vehicles are communicated within a specific range. For radar, maximum unambiguous range is 150 km while the range of communication will be 10 km. So, within these range, a better optimal solution is obtained by increasing the channel capacity with higher iteration for real-time scenarios. That is, the WOA algorithm provides the best information to share both radar and communication information without any time delay which satisfies the radar and communication requirement based on the constraint condition with 500 iterations.

Performance of WOA
Figure 6 shows the performance of BER of MIMO OFDM with respect to SNR under different data rates. The BER Eb/N0 is enhanced with the improvement of the data rate. BER is the parameter which denotes the performance of data transmission. The performance of the channel will decrease if BER increases and the performance will be high if BER decreases.

BER versus SNR under different data rates for 100 vehicles with an average speed of 80 km/h
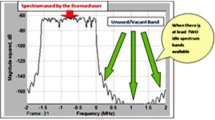
Figure 7a shows the spectrum of the transmitted and received radar baseband signal in terms of frequency and SNR. Figure 7b shows the communication signal that is transmitted in the transmitter and received in the receiver in terms of frequency and SNR. Figure 7c shows the frequency of the mixed radar and communication signal on the transmitter side. From the graph, it is clear that the frequency signal is located at 1 MHz of the spectrum. The spectrum of the communication, radar, and mixed signal can be simulated by means of − 2 to 1.5 dB SNR and − 5 to 5 MHz of the frequency with 5.8 GHz of carrier frequency and 312.5 kHz of subccarrier frequency.

Spectrum of the signal
Figure 8 shows the data rate and the blind zone of the radar, communication and IRHCS. Both the data rate and the blind zone varies while increasing the number of symbols. The blind zone can be calculated based on the product of speed propagation and the pulse duration which can be divided by two. The graph shows that both the data rate and the blind zone are improved with the increasing OFDM symbols. These symbols improve both the communication and radar as well as IRHCS gives better performance than communication and radar.

Variation of data rate and blind zone with the number of symbols for 100 vehicles with an average speed of 80 km/h
Figure 9 shows the data rate and the angle resolution of the radar, communication, phased array and the IRHCS. In the graph, the number of antennas varies from 2 to 20 moving by 2. Both the data rate and the angle resolution is improved by increasing the number of antennas. The performance of IRHCS is better than the phased array.

Variation of data rate and angle resolution with the number of antennas for 100 vehicles with an average speed of 80 km/h
Figure 10 shows the data rate and duty ratio of the radar, communication and IRHCS with the maximum unambiguity range. The graph shows that both the data rate and duty ratio are decreasing while increasing the unambiguity range. But the performance of IRHCS is better when compared with radar and communication.

Variation of data rate with MUR for 100 vehicles with an average speed of 80 km/h
Figure 11 shows the maximum unambiguity velocity and unambiguity range with pulse repetition frequency. The performance of MUV and MUR of radar is varied while increasing the PRF from 1 to 10 kHz. The unambiguity velocity is increased and the maximum unambiguity range is decreased with the PRF.

Variation of MUV and MUR with PRF for 100 vehicles with an average speed of 80 km/h
Figure 12 shows the data rate and MUR of the radar, communication and IRCHS with pulse repetition frequency. Data rate and MUR are varied with the increase of PRF. While increasing the PRF, MUR should be decreasing. The increase of PRF gives better MUR performance for IRHCS rather than radar and communication with 5.8 GHz center frequency, 0.8 μs cycle prefix length and 1–10 kHz of PRF.

Variation of data rate and MUR with PRF for 100 vehicles with an average speed of 80 km/h
Figure 13 shows the comparison of received signal strength, it is the measure of power in the signal. The graph shows the distance in meters with received signal strength factor as dB, as the distance increases, the received signal strength performance increases in WiMAX/DSRC. The total number of distance taken is 6 and the signal strength can be improved by 20. The received signal strength increases with respect to the distance, the performance is better in the IRCHS whale optimization system than the kalman filter [31] and LCPSA [32].

Performance of received signal strength for 45 vehicles with an average speed of 20 km/h
Figure 14 shows the comparison of blocking probability. The minimum blocking probability is 10 power 1 and the number of channels based on time is 0.08 shows the high performance in the channel. The blocking probability varies with the number of channels based on time, the performance of the proposed is better than the Adaptive modulation [33] and LCPSA [32].

Performance of blocking probability for 45 vehicles with an average speed of 20 km/h
Figure 15 shows the comparison of throughput, it is the successful delivery of data transmission in the given interval of time. It depicts the number of delivered packet succeed in the given time, then the throughput increases. The analysis shows that very high value can be achieved in WiMAX/DSRC when compared to DSRC. The throughput of the proposed is higher than the LCPSA [32] and AODV [34].

Performance of throughput for 45 vehicles with an average speed of 20 km/h
Figure 16 shows the packet delivering ratio comparison. It is the measure of successful delivery of the packets. The total number of data can be taken as 1000 and the PDR is improved. As the number of packets that are received in the vehicle increases, then the PDR ratio become high. When compared to LCPSA [32] and RSA [35], the proposed gives better PDR.

Performance of packet delivering ratio 45 vehicles with an average speed of 20 km/h
Figure 17 shows the PDR variation in different systems. When the speed is high, PDR decreases. The proposed approach gives higher PDR than the FF-AOMDV [36], AOMDV [37] and AOMR-LM [38] with a speed of 10 km/h. ‘m’ represents the length and ‘n’ represents the time are the notation of the node speed in the x-axis.

Packet delivering ratio versus node speed 25 vehicles with an average speed of 10 km/h
Figure 18 shows the PDR variation of various approaches. PDR decreases when the packet size increases. The graph shows that the proposed approach gives better PDR than the FF-AOMDV [36], AOMDV [37], AOMR-LM [38] with 1200 bytes of packet size.

Packet deliver ratio versus packet size 25 vehicles with an average speed of 10 km/h
Figure 19 shows that the proposed work provides better throughput than the other. Throughput decreases if the node speed increases. The proposed throughput gives higher performance than FF-AOMDV [36], AOMDV [37], and AOMR-LM [38].

Throughput versus node speed for 25 vehicles with an average speed of 10 km/h
Figure 20 shows that when the size of the packet increases, throughput decreases. The graph shows that the proposed approach gives better throughput than the techniques such as FF-AOMDV [36], AOMDV [37] and AOMR-LV [38].

Throughput versus packet size for 25 vehicles with an average speed of 10 km/h
Figure 21 shows that the proposed PDR performance as compared with the various other techniques and the graph clearly shows that it provides better performance than the SCRP [39], ICAR [40], GyTAR [41], and GPSR [42].

PDR for 150–600 vehicles with an average speed of 100–150 km/h
6 Conclusion
This paper proposed the integrated radar and hybrid communication with DSRC/WiMAX in SDR with MIMO OFDM, which minimizes the cost and bandwidth as well as increases the channel capacity, SNR, packet delivery ratio and angle resolution. The requirements of both the radar and the communication are analyzed and an optimization problem is established to obtain suitable parameters of these requirements. The whale optimization algorithm solves the optimization problem based on the requirements of integrated radar and communication and achieves the appropriate parameters of the system and also improves the system capacity. Simulation results show that the performance of the proposed approach is higher than the existing algorithms. It can be applicable for real world scenarios where all the vehicles can share all the information in certain range. The information such as delay, collision, warning etc. are shared among all the vehicles within a certain range because the vehicles which are in the certain range are interconnected between themselves. A hybrid combination of communication technology with millimeter wave technology is the future research direction for V2V communication to provide excellent performance while integrating both radar and communication.
References
Zhao, J., & Cao, G. (2008). VADD: Vehicle-assisted data delivery in vehicular ad hoc networks. IEEE Transactions on Vehicular Technology,57(3), 1910–1922.
Dimitrakopoulos, G., & Demestichas, P. (2010). Intelligent transportation systems. IEEE Vehicular Technology Magazine,5(1), 77–84.
Wang, F. Y. (2010). Parallel control and management for intelligent transportation systems: Concepts, architectures, and applications. IEEE Transactions on Intelligent Transportation Systems,11(3), 630–638.
Li, L., Li, X., Li, Z., Zeng, D. D., & Scherer, W. T. (2010). A bibliographic analysis of the IEEE Transactions on Intelligent Transportation Systems literature. IEEE Transactions on Intelligent Transportation Systems,11(2), 251–255.
Liu, Y., Dion, F., & Biswas, S. (2005). Dedicated short-range wireless communications for intelligent transportation system applications: State of the art. Transportation Research Record, Journal of the Transportation Research Board,1(1910), 29–37.
Bilstrup, K., Uhlemann, E., Strom, E. G., & Bilstrup, U. (2008). Evaluation of the IEEE 802.11p MAC method for vehicle-to-vehicle communication. In Vehicular technology conference, VTC 2008-fall. IEEE 68th 2008 September 21 (pp. 1–5). New York: IEEE.
Martinez, F. J., Toh, C. K., Cano, J. C., Calafate, C. T., & Manzoni, P. (2010). Emergency services in future intelligent transportation systems based on vehicular communication networks. IEEE Intelligent Transportation Systems Magazine,2(2), 6–20.
Rengaraju, P., & Lung, C. H. (October 2016). Network architecture and QoS study on software defined LTE vehicular ad hoc networks. In Communication and electronics systems (ICCES), international conference (pp. 1–7). New York: IEEE.
Xiong, X., Xiang, W., Zheng, K., Shen, H., & Wei, X. (2015). An open source SDR-based NOMA system for 5G networks. IEEE Wireless Communications,22(6), 24–32.
Baldini, G., Sturman, T., Biswas, A. R., Leschhorn, R., Godor, G., & Street, M. (2012). Security aspects in software defined radio and cognitive radio networks: A survey and a way ahead. IEEE Communications Surveys and Tutorials,14(2), 355–379.
Ulversoy, T. (2010). Software defined radio: Challenges and opportunities. IEEE Communications Surveys and Tutorials,12(4), 531–550.
Dhar, S., Kandar, D., Bose, T., & Bera, R. (2009). Smart antenna based broadband communication in intelligent transportation system. Preprint arXiv:0903.3163.
Arslan, S., & Saritas, M. (2017). The effects of OFDM design parameters on the V2X communication performance: A survey. Vehicular Communications,7, 1–16.
Yang, K., Ou, S., Chen, H. H., & He, J. (2007). A multihop peer-communication protocol with fairness guarantee for IEEE 802.16-based vehicular networks. IEEE Transactions on Vehicular Technology,56(6), 3358–3370.
Kenney, J. B. (2011). Dedicated short-range communications (DSRC) standards in the United States. Proceedings of the IEEE,99(7), 1162–1182.
Martelli, F., Renda, M. E., Resta, G., & Santi, P. (2012). A measurement-based study of beaconing performance in IEEE 802.11p vehicular networks. In INFOCOM, 2012 proceedings IEEE (pp. 1503–1511).
LeBrun, J., Chuah, C. N., Ghosal, D., & Zhang, M. (2005). Knowledge-based opportunistic forwarding in vehicular wireless ad hoc networks. In Vehicular technology conference, 2005. VTC 2005-Spring. 2005 IEEE (Vol. 4, p. 2289–2293).
Kandar, D., Subathradevi, C., Porkodi, S., Princy, C. A., Nithya, M., & Bhuvaneswari, E. (2013). Convergence of DSRC and WiMAX technology for intelligent transportation system. Journal of Advances in Computer Networks,1(2), 61–72.
Doyle, N. C., Jaber, N., & Tepe, K. E. (2011). Improvement in vehicular networking efficiency using a new combined WiMAX and DSRC system design. In Communications, computers and signal processing (PacRim) (pp. 42–47).
Jain, R., & So-In, C. (2008). System-level modeling of IEEE 802.16e mobile WiMAX networks: Key issues. IEEE Wireless Communications,15(5), 73–79.
Wu, C., Yoshinaga, T., Ji, Y., Murase, T., & Zhang, Y. (2017). A reinforcement learning-based data storage scheme for vehicular ad hoc networks. IEEE Transactions on Vehicular Technology,66(7), 6336–6348.
Huang, X., Zhao, D., & Peng, H. (2017). Empirical study of DSRC performance based on safety pilot model deployment data. IEEE Transactions on Intelligent Transportation Systems,18, 2619–2628.
Vegni, A. M., & Little, T. D. (2011). Hybrid vehicular communications based on V2V–V2I protocol switching. International Journal of Vehicle Information and Communication Systems,2(3–4), 213–231.
Ali, M. F., Harum, N. H., & Abu, N. A. (2017). An intelligent radio access technology selection for vehicular communications. International Journal of Applied Engineering Research,12(14), 4365–4371.
Kumari, P., Gonzalez-Prelcic, N., & Heath, R. W. (2015). Investigating the IEEE 802.11ad standard for millimeter wave automotive radar. In Vehicular technology conference (VTC fall) (pp. 1–5).
Sit, Y. L., Nuss, B., & Zwick, T. (2018). On mutual interference cancellation in a MIMO OFDM multiuser radar-communication network. IEEE Transactions on Vehicular Technology,67(4), 3339–3348.
Kumari, P., Choi, J., González-Prelcic, N., & Heath, R. W. (2018). IEEE 802.11ad-based radar: An approach to joint vehicular communication-radar system. IEEE Transactions on Vehicular Technology,67(4), 3012–3027.
Cohen, D., Mishra, K. V., & Eldar, Y. C. (2017). Spectrum sharing radar: Coexistence via Xampling. IEEE Transactions on Aerospace and Electronic Systems,54(3), 1279–1296.
Aljarah, I., Faris, H., & Mirjalili, S. (2018). Optimizing connection weights in neural networks using the whale optimization algorithm. Soft Computing,22(1), 1–5.
Aquino-Santos, R., Villaseñor-González, L. A., Rangel-Licea, V., Edwards-Block, A., Galaviz-Mosqueda, A., & Buenrostro, L. M. O. (2011). Inter-vehicular communication using IEEE 802.16e technology. Mechatronics Series I-Intelligent Transportation Vehicles,1, 67.
Shelly, S., & Babu, A. V. (2015). Prediction of link residual lifetime using Kalman filter in vehicular ad hoc networks. In Intelligent computational systems (RAICS) (pp. 268–273).
Guchhait, A. (2018). A hybrid V2V system for collision-free high-speed internet access in intelligent transportation system. Transactions on Emerging Telecommunications Technologies,29, e3282.
Bazzi, A., Masini, B., Zanella, A., & Thibault, I. (2017). On the performance of IEEE 802.11p and LTE–V2V for the cooperative awareness of connected vehicle. IEEE Transactions on Vehicular Technology,1(99), 1.
Al-Tahrawi, M. A., Ismail, M., Nordin, R., & Yuwono, T. (2016). Performance of AODV and OLSR routing protocol in a hybrid sensor and vehicular network 802.11p. In Wireless and telematics (ICWT), 2016 2nd international conference (pp. 140–145).
Zhang, X., Shang, Y., Li, X., & Fang, J. (2016). Research on overlay D2D resource scheduling algorithms for V2V broadcast service. In Vehicular technology conference (VTC-fall) (Vol. 8(7), pp. 1–5).
Taha, A., Alsaqour, R., Uddin, M., Abdelhaq, M., & Saba, T. (2017). Energy efficient multipath routing protocol for mobile ad-hoc network using the fitness function. IEEE Access,5, 10369–10381.
Smail, O., Cousin, B., Mekki, R., & Mekkakia, Z. (2014). A multipath energy-conserving routing protocol for wireless ad hoc networks lifetime improvement. EURASIP Journal on Wireless Communications and Networking,2014(1), 139.
Kulkarni, S. A., & Rao, G. R. (2013). Modeling security issues for multipath routing in vehicular networks for IEEE 802.11p. In Emerging trends in communication, control, signal processing and computing applications (C2SPCA), 2013 international conference (pp. 1–4).
Togou, M. A., Hafid, A., & Khoukhi, L. (2016). SCRP: Stable CDS-based routing protocol for urban vehicular ad hoc networks. IEEE Transactions on Intelligent Transportation Systems,17(5), 1298–1307.
Alsharif, N., Céspedes, S., & Shen, X. (2013) iCAR: Intersection-based connectivity aware routing in vehicular ad hoc networks. In Communications (ICC), 2013 IEEE international conference (pp. 1736–1741).
Jerbi, M., Senouci, S. M., Meraihi, R., & Ghamri-Doudane, Y. (2007). An improved vehicular ad hoc routing protocol for city environments. In Communications, 2007. ICC’07. IEEE international conference (pp. 3972–3979).
Karp, B., & Kung, H. T. (2000) GPSR: Greedy perimeter stateless routing for wireless networks. In Proceedings of the 6th annual international conference on mobile computing and networking (pp. 243–254).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Guchhait, A., Maji, B. & Kandar, D. Integration of hybrid communication and remote sensing for ITS application. Telecommun Syst 74, 511–529 (2020). https://doi.org/10.1007/s11235-020-00664-y
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11235-020-00664-y