
Abstract
With the concept of advanced intelligent transportation systems, the integration of data with technology underway with internet of things brings the concept of always connected and cognizant vehicles as an application area. The major constituents of internet of things are connection, convergence, convenience and the connected car. Road safety and vehicular infotainment are the most emerging issues for the automakers in this regard. Implementation of vehicular safety in urban lanes requires vehicle to vehicle sensing and data communication simultaneously. Because of operation spectrum scarcity, the requirement of vehicle to vehicle sensing and communication on a single platform simultaneously empowered with cognitive radio would be cost efficient. Dynamic Spectrum Access based integrated radar sensing and wireless communication transceiver is demonstrated in this work. In the proposed hardware model a direct sequence spread spectrum radar transceiver and an non contiguous orthogonal frequency division multiplexing communication transceiver is used.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction and motivation
Internet of Things (IoT) empowered with telematics technology enables the advanced intelligent transportation system with always connected vehicle (Lu et al. 2014). Automakers are investing more and more in telematics technology to realize connected cars for reducing highway accidents and fatalities with effective improvement of traffic flow and traffic safety nowadays (Papadimitratos et al. 2009). In the next 5 years there would be a large increase in connected cars and by 2020 almost two hundred million connected vehicles which will be on road would be enabled with new in-vehicle services and automated driving capabilities. This is as predicted by Gartner (2015). In urban lanes which is densely populated with vehicles the unavoidable traffic congestion, inadequate parking space increases economic cost resulting in extra travel time, extra fuel as well as road accidents (Schrank et al. 2012). These issues can be addressed by intelligent traffic control and fleet management (Anda et al. 2005) and by empowering vehicles with intelligent sensing and communication with enhanced driver assistance system for collision avoidance (Olaverri-Monreal et al. 2010). Future connected vehicles will communicate with installed onboard systems as well as outside environments increasing situational awareness (Salmon et al. 2012). These vehicles would be enabled with streaming audio and video as well as over-the-air updates delivering enhanced customer experience (Liu 2011). The challenges faced in this regard are addressed by cloud based Vehicular Ad hoc Networking (VANET) technology (Hartenstein and Laberteaux 2010). Spectrum sensing and Spectrum shifting in real time can help VANET to work on the television white space meeting the spectrum scarcity issue (Piran et al. 2014). Implementing VANET in ITS integrated sensing powered by Cognitive radio (Sturm et al. 2009) would be a cheaper and feasible solution, wherein simultaneous environment spectrum sensing and communicating the sensed data by the ad-hoc network links are essential (Sturm and Wiesbeck 2011). Advanced intelligent transportation networks (Sussman 2008) should have the ability of V2V sensing and communication, communication with the road side unit with reliable spectrum sensing and shifting as a part of Cognitive Radio (OFDM 2011; Sturm and Zwick 2010; Haykin 2005). Car infotainment applications such as high speed internet access, internet gaming, online TV reception, talking to a live mechanic for a car problem online, locating roadside and emergency assistance, putting questions online about the best price dealers on tires, the best repair estimates etc. demands larger spectrum resources for their quality service. In urban scenarios with high vehicle density (Di Felice et al. 2012; Cheng et al. 2014) or in highways spectrum scarcity for V2V sensing and communication operation is a common problem. Opportunistic access of the idle licensed spectrum (Wang et al. 2013) can be realized by DSA in cognitive radio. DSA for wireless regional area network (WRAN) and wireless local area network (WLAN) are stated in Stevenson et al. (2009) and Flores et al. (2013) respectively. Article (Tsuru 2011) states utilization of available TV white space for V2V cognitive communication between two moving vehicles. V2V multi-hop communication is demonstrated in Tsuru (2013), Altintas et al. (2013). Preparation of a data table containing geo-location information with the available channels in terms of vacant TV band is proposed in Pagadarai et al. (2009). In regards of the solution of spectrum shortage demonstrated in Tsuru (2013), Tsuru (2011), Altintas et al. (2013), Pagadarai et al. (2009) states that DSA may be utilized to work on TV white space.
2 Problem definition and proposed solution
Spectrum is going to be an invaluable resource in the coming days as the communication devices will always be using that. The cars enabled with the internet will constantly use the spectrum to implement the concept of always connected and convergence. Researchers have put their efforts to maximize the spectrum efficiency. Also now a days the vehicular safety measures taken with the help of cameras are not being considered effective as the cameras are not able to give best performance in all weather conditions like heavy rain or foggy weather hazard. Hence the researchers have proposed to replace the cameras with vehicular radars to be used for safety measures. In addition to that few applications like next generation internet of vehicles, next generation drone unmanned aircraft system demands the radar sensing and wireless communication operation to be performed on a single platform. For optimization of the joint operation a single waveform for both the operations is always preferred by the researchers. For the joint radar communication platform orthogonal frequency division multiplexing (OFDM) (Braun et al. 2015; Wang et al. 2008) operated with phase-shift keying (PSK) has already been the choice for many research proposal. In providing the joint platform the phase coded OFDM signal also has been proposed. The flexibility of waveform design is large in phase coded OFDM (Braun 2014) signal, where each subcarrier is modulated by specific sequences. This phase coded signals are comparable with Chirp radar signals with zero range-Doppler coupling (Franken et al. 2006). However the phase coded signals can easily be decoded due to limited number of phase codes and having fixed length. Chaos-based phase coded OFDM signal eliminates these drawbacks. Till date no such single waveform is discovered which can give satisfactory performance in joint operation utilizing spectrum efficiency. Linear frequency modulated (LFM) provides low data rate and in direct sequence spread spectrum (DSSS) radar performs poor. In future smart cities with vehicle populated urban lanes available spectrum would be scarce for the joint sensing and data communication. Hence the urgent need for these application areas is that the vehicular system must be able to sense the available environment spectrum by utilizing dynamic spectrum access (UAS 2015), utilize that spectrum for the purpose of wireless data communication with the road side unit or base station transceiver as well as radar object sensing simultaneously. We have proposed here dynamic spectrum access based joint OFDM radar sensing and data communication system. In the joint system spectrum for operation is allocated to the radar sensor as well as to the wireless data communicator utilizing non Contiguous OFDM as shown in Figs. 1, 2 and 3.

Cognitive radio spectrum sensing

Spectrum shifting for RADAR

Spectrum shifting for communication
3 Novelty of the proposed work
Considering the spectrum scarcity in future ITS the proposed system would be providing the simultaneous radar sensing and data communication using the non contiguous OFDM in the backbone wherein sensing the idle spectrum from the environment the dynamic spectrum access module determines the available spectrum of operation and provides operating carrier to both the radar and the communication subsystem.
4 System model
For modeling the proposed integrated system the baseband level chosen is NC-OFDM. TheNC-OFDM transmit signal in time domain may be expressed as,
The orthogonality between individual subcarriers avoiding interference is specified by
The first block used is Dynamic spectrum sensing for sensing idle carrier for RADAR and Communication operation.
The unknown incoming signal is modeled as a circularly symmetric complex Gaussian variable \( {\text{x }} \sim {\text{ }}{\rm N}{\text{ }}\left( {0,{\text{ }}\gamma ^{{\text{2}}} {\mathbf{I}}} \right) \), then the sensed signal may be either, \( {\text{y}} | {\text{H}}_{{\mathbf{0}}} {\text{x }} \sim {\text{ }}{\rm N}\left( {0,\sigma ^{{\text{2}}} {\mathbf{I}}} \right) \) or \( {\text{y}} | {\text{H}}_{{\mathbf{1}}} {\text{x }} \sim {\text{ }}{\rm N}\left( {0,(\sigma ^{{\text{2}}}+{\gamma^{2}}) {\mathbf{I}}}) \right) \).
The Energy of the received signal when compared against a threshold becomes,
After sensing the available spectrum 1st carrier is used for subcarrier input packing of the wireless communication OFDM frame and the 2nd carrier is used for the OFDM radar respectively. The subcarrier input packing of the OFDM frame corresponds to the spectrum occupancy and un-occupancy. Effectively the system becomes non-contiguous OFDM. The radar sensed data such as relative distance and velocity is fed to the communicating subsystem whereby the data is put to the OFDM frame and transmitted. Receiver receives the data and decodes that. The received OFDM symbol in time domain becomes,
where,
The channel impulse response is,
The spectrum of each subcarrier is a frequency shifted OFDM symbol-modulated sinc pulse. For kth such subcarrier the spectrum may be represented as,
where ‘f’ is any frequency, ‘fk’ is the operating frequency of the kth sub-carrier, ‘T0’ is the duration of each NC-OFDM symbol and (f–fk) is the shifted centre frequency of the kth subcarrier.
5 Simulation and results analysis
We used NC-OFDM to integrate Radar and Communication. Cognitive radio energy detector based sensor continuously performs spectrum sensing and dynamically identifies unutilized available spectrum and allocates this spectrum band to radar and communication transceiver for simultaneous operation on the unused vacant band and automatically switches to another band when primary users are again detected. The simulation models are shown in Figs. 4 and 5.

Environmental spectrum sensing and communication proposed model

a Unoccupied bands are used to provide carrier to radar, b provide carrier to communication system
To facilitate with the carrier for operation the IFFT block is used for carrier input packing to deactivate the busy carriers and to activate the idle spectrum in the environment. Radar sensing subsystem uses one portion of this activated carrier for target detection and communication subsystem uses another portion of this spectrum for data communication as shown in Fig. 6. Data communication subsystem is shown in Fig. 6.

Communication subsystem
The communication subsystem is designed with a channel having characteristics of multipath fading.
Figure 7 shows the generated radar signal utilizing the idle spectrum. In the dynamic spectrum access some captured spectrum whose position is changing after certain period of time. The generated and sensed signal is shown in Figs. 8 and 9. These figures say that the position of primary and secondary user is changing after certain period of the time.

Radar transmitted signal generated using the unutilized carrier

Spectrum of PU and SU at 1st interval

Spectrum of PU and SU at 2nd interval
After simulating the design we got the changing bit error rate (BER) of the data communication system with changing signal to noise ratio (SNR). The plot of the BER versus the SNR is shown in Figs. 10 and 11. In both the plots the BER is scaled by the value 10−3.

SNR vs BER for integrated RADCOMM system

BER comparison for OFDM, NCOFDM
In Fig. 10, bit error rate is decreased with increasing SNR for CR based joint radcomm system. The BER comparison between OFDM and NC-OFDM is shown in Fig. 11, this ensures that NC-OFDM has higher data rate for wireless communication. Since the active power control and power redistribution is done on the active subcarriers signal to-noise ratio (SNR) is improved in the NC-OFDM systems and their bit error rate (BER) performance is also much better. The RCS value of the target which we have initialized to 100 m2 (as 100 m2 may be the RCS of an automobile), simulating the entire RADCOMM system the received RCS value of the target is 99.98 m2 which is closest to the actual value shown in Fig. 12.

Transmitted and received RCS value of target
6 Field test set up and results
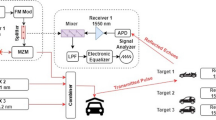
In the field test the experiment setup was prepared for sensing the target vehicle using Spread Spectrum radar on software defined radio. The target signature received in that process was communicated through NC OFDM implemented on software defined radio for effective RF up and down conversion. The block diagram of Spread spectrum Radar implemented on SDR is shown in Figs. 13 and 14.

Spread spectrum radar transmitter block diagram

Spread spectrum radar receiver block diagram
6.1 Spread spectrum radar model
In the transmitter the radar pulse (t) is first modulated or mapped in the BPSK modulator. The first level modulated signal is,
where E is the energy of each bit, T is the time period. For obtaining a form suitable for transmission over wireless channel the 2nd stage of modulation is done using a poly phase (P4) code as spreading sequence. The 2nd stage modulated signal is,
In the receiver after down conversion the signal is first correlated (auto) with a locally generated de-spread sequence.
The output is then multiplied by the identical carrier used in the transmitter to demodulate the baseband radar data mixed with Doppler. After Doppler extraction the data contains the target with its velocity. The radar signal bandwidth was 100 MHz.
6.2 NC-OFDM communication model
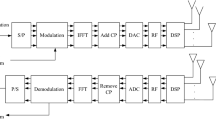
The NC-OFDM transmitter shown in Fig. 15 the radar sensed data is QPSK modulated, converted to serial to parallel for IFFT processing where the sub carrier nulling is done from the information of spectrum sensing and after adding cyclic prefix finally the serial converted data is frequency up converted and transmitted. The reverse processing is done in the NC OFDM receiver shown in Fig. 16. The resulting window visible in the client front panel attached to the radar receiver is shown in Fig. 17, where from the received target signature the target vehicle with velocity is estimated. The vehicle velocities with vehicle count number are displayed at a time in that figure.

NC OFDM transmitter block diagram

NC OFDM receiver block diagram

Valid reception of the vehicle velocity crossing the radar
7 Conclusion and future work
We have succeeded in simultaneous sensing and communicating based on cognitive radio concepts. Using the OFDM frame we integrated radar and communication in a single frame in simulation and in the hardware testing DSSS Radar data was successfully displayed in the client window. We have been successful in sending the radar waveform, receiving the reflected target signature, detected vehicle with the velocity information from Doppler estimation. Future challenges include dynamic spectrum access based V2V sensing and communication using one carrier with data hiding approach in high vehicle density lanes.
References
Altintas O, Ihara Y, Kremo H, Tanaka H, Ohtake M, Fujii T, Yoshimura C, An- K, Tsukamoto K, Tsuru M et al (2013) Field tests and indoor emulation of distributed autonomous multi-hop vehicleto-vehicle communications over TV white space. ACM SIGMO-BILE Mobile Comput Commun Rev 16(4):54–57
Altintas O, Nishibori M, Oshida T, Yoshimura C, Fujii Y, Nishida K, Ihara Y, Saito M, Tsukamoto K, Tsuru M, et al. (2011) Demonstration of vehicle to vehicle communications over TV white space. In: Proceedings IEEE VTC Fall, San Francisco, CA, USA
Anda J, LeBrun J, Ghosal D, Chuah CN, Zhang M (2005) VGrid: vehicular adhoc networking and computing grid for intelligent traffic control. In Proc. IEEE VTC Spring, Stockholm, Sweden
Braun M (2014) OFDM radar algorithms in mobile communication networks, dissertation, KIT
Braun M, Sturm C, Jondral FK (2015) On the frame design for Joint OFDM radar and communications. https://www.cel.kit.edu/…/OFDMWS_BraunSturmJondral_FrameDesign. Accessed 14 Dec 2015
Cheng N, Zhang N, Lu N, Shen X, Mark J, Liu F (2014) Opportunistic spectrum access for CR-VANETs: a game theoretic approach. IEEE Trans Vehic Technol 63(1):237–251
Di Felice M, Doost-Mohammady R, Chowdhury KR, Bononi L (2012) Smart radios for smart vehicles: cognitive vehicular networks. IEEE Veh Technol Mag 7(2):26–33
Flores A, Guerra R, Knightly E, Ecclesine P, Pandey S (2013) IEEE 802.11 af: a standard for TV white space spectrum sharing. IEEE Commun Mag 51(10):92–100
Franken GE, Nikookar H, Van Genderen P (2006) Doppler tolerance of OFDM-coded radar signals, in radar conference, 2006. In: 3rd European EuRAD 2006. pp 108–111
Gartner, Musings From Def Con 23: internet of things risks are bad and likely to get worse, 25 September 2015
Hartenstein H, Laberteaux K (2010) VANET: vehicular applications and inter-networking technologies. Hoboken: Wiley. http://www.nhtsa.gov/
Haykin S (2005) Cognitive radio: brain-empowered wireless communications. IEEE J Select Areas Commun 23(2):201–220
Ihara Y, Kremo H, Altintas O, Tanaka H, Ohtake M, Fujii T, Yoshimura C, Ando K, Tsukamoto K, Tsuru M, et al. (2013) Distributed autonomous multi-hop vehicle-to-vehicle com-munications over TV white space. In: Proc. IEEE CCNC, Las Vegas, NV, USA
Liu N (2011) Internet of vehicles: your next connection. Huawei WinWin 11:23–28
Lu N, Cheng N, Zhang N, Shen X, Mark JW (2014) Connected vehicles: solutions and challenges. IEEE Internet Things J 1(4):289–299
OFDM (2011) Concepts for future communication systems. H. Rohling, ed. Google book. https://books.google.co.in/books?isbn=3642174965
Olaverri-Monreal C, Gomes P, Fernandes R, Vieira F, Ferreira M (2010) The see-through system: A VANET-enabled assistant for overtaking maneuvers. In: Proc. IEEE intelligent vehicles symposium (IV), San Diego, CA, USA
Pagadarai S, Wyglinski AM, Vuyyuru R (2009) Characterization of vacant UHF TV channels for vehicular dynamic spectrum access. In: Proc IEEE VNC, Tokyo, Japan
Papadimitratos P, Fortelle AL, Evenssen K, Brignolo R, Cosenza S (2009) Vehicular communication systems: enabling technologies, applications, and future outlook on intelligent transportation. IEEE Commun Magaz 47(11):84–95
Piran M, Cho Y, Yun J, Ali A, Suh DY (2014) Cognitive radio-based vehicular ad hoc and sensor networks. Int J Distrib Sensor Netw 10(8):154193
Salmon PM, Stanton NA, Young KL (2012) Situation awareness on the road: review, theoretical and methodological issues, and future directions. Theor Issues Ergon Sci 13(4):472–492
Schrank D, Eisele B, Lomax T (2012) TTI’s 2012 urban mobility report. In: Texas A&M transportation institute and the Texas A&M University System
Stevenson CR, Chouinard G, Lei Z, Hu W, Shellhammer SJ, Caldwell W (2009) IEEE 802.22: the first cognitive radio wireless regional area network standard. IEEE Commun Mag 47(1):130–138
Sturm C, Wiesbeck W (2011) Waveform design and signal processing aspects for fusion of wireless communications and radar sensing. Proc IEEE. 99(7):1236–1259
Sturm C, Zwick T (2010) Joint radar sensing and communications based on OFDM signals for intelligent transportation networks”. Paper_LS_Telcom_V2. http://www.terjin.com/dl/summit/paper_sturm_ls_telcom_summit_2010.pdf
Sturm C, Zwick T, Wiesbeck W (2009) An OFDM system concept for joint radar and communications operations. In: Proceedings of the 69th IEEE vehicular technology conference, VTC Spring
Sussman JS (2008) Perspectives on intelligent transportation systems (ITS)”, Google book. https://books.google.co.in/books?isbn=0387232605
UAS (2015) The role of cognitive radio in remote Operation of UAS, computer systems @ Colorado, computer and cyberphysical systems researchers at Colorado
Wang J, McGeehan C, Williams A, Doufexi A (2008) Application of cooperative sensing in radar-communications coexistence. IET Commun 2(6):856–868
Wang T, Song L, Han Z (2013) Coalitional graph games for popular content distribution in cognitive radio VANETs. IEEE Trans Vehic Technol 62(8):4010–4019
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Chakraborty, M., Maji, B. & Kandar, D. Dynamic spectrum access based simultaneous non-contiguous OFDM radar sensing and communication. Microsyst Technol 27, 379–385 (2021). https://doi.org/10.1007/s00542-019-04444-w
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00542-019-04444-w