
Abstract
This paper proposes a robust optimization of eight chaotic maps: Logistics, Sine, Gauss, Circle, Tent, Chebyshev, Singer, and Piecewise Maps, for superior image encryption. The proposed model consists of two main processes: chaotic confusion and pixel diffusion. In the chaotic confusion process, the positions of the image’s pixels are permuted with the chaotic maps, where the initial condition and the control parameters represent the confusion key. Firstly, the confusion process was performed using the eight chaotic maps without optimization. Then nine metaheuristic optimizers, which are the genetic algorithm, particle swarm optimizations, whale optimization algorithm, dragonfly algorithm, grey wolf optimizer, moth-flame optimizer, sine cosine algorithm, multi-verse optimizer, and ant-lion optimizer, have been used to fine-tune the control parameters of the eight chaotic maps. Then the image’s pixel values are changed using the diffusion function in the pixel diffusion process. Multiple performance metrics, such as entropy, histogram, cross-correlation, computation time analysis, the number of pixels change rate (NPCR), unified average changing intensity (UACI), noise attack, data loss, and key analysis metrics, are utilized to evaluate the proposed model. The results demonstrate that the encryption algorithms based on the eight optimized chaotic maps are more resistant to differential attacks than those without optimization. Furthermore, the optimized Gauss chaotic map is the most computationally efficient, while the chaotic circle map has the most robust key. The careful adjustment of initial conditions and control parameters empowers the chaotic maps to create encryption keys with greater randomness and complexity, thereby increasing the security level of the encryption scheme. Experimental analysis indicates that the correlation coefficient values of images encrypted with the proposed scheme are nearly zero, the histogram of the encrypted images is uniform, the execution time of 0.1556 s, the key space of 10^80, NPCR of 99.63%, UACI of 32.92%, and entropy of 7.997. Moreover, the analysis of noise and cropping attacks, along with the comparison with other algorithms, demonstrate the efficiency and robustness of the proposed algorithm.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
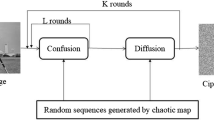
Due to the rapid progress in smart multimedia devices and communication technologies, securing multimedia data during the transmission process from sender to receiver is extremely critical in digital communication. For this reason, encryption and its applications are critical for improving security standards. Images always have a high value among all other multimedia types due to their visual impact [1]. Images are used to communicate information in various industries, including but not limited to medical, military, aerospace, banking, and education; therefore, they must be protected from unauthorized access [2]. The growing demand for robust image encryption systems has emerged as a consequence of the increased need for the Internet of Things and technological advancements [3]. Image encryption is mainly composed of two phases: confusion and diffusion. The pixels are shuffled throughout the confusion stage [4], while the pixel values are changed during the diffusion stage [5]. An efficient image encryption method includes treating an image as a stream of bits and then encrypting this stream utilizing traditional encryption methods like the Advanced Encryption Standard (AES), the International Data Encryption Algorithm (IDEA), and the Triple Data Encryption Algorithm (TDEA). These methods suffer from a strong correlation between neighbouring pixels and redundant data [6, 7]. As a result, different encryption approaches based on various technologies have been proposed to provide better security to images [8], such as frequency domain transformation [9], chaos theory [10], Deoxyribonucleic Acid (DNA) coding [11], and compressive sensing [12, 13]. One of the most well-known approaches is using chaotic maps with image encryption. Chaos-based image encryption algorithms provide robust results in terms of complexity, security, and speed due to their characteristics, such as pseudo-randomness, ergodicity, non-periodicity, and sensitivity to initial conditions. [14]. Due to the sensitivity of chaotic maps to initial conditions, the control parameters and initial conditions must be carefully selected. Otherwise, the results will be unsatisfactory, the secret keys can be predicted, and unauthorized individuals can access data [15]. Metaheuristics techniques have been used to optimize appropriate control parameters to overcome this problem. Figure 1 presents the block diagram of the proposed chaos-based image encryption algorithm. The main contributions of the proposed work are:
-
(1)
Presenting a novel approach utilizing metaheuristic optimization algorithms to enhance the security and robustness of image encryption based on chaotic maps, leveraging the chaotic maps as objective functions to improve the optimization process through the inherent complexity and randomness of chaotic sequences.
-
(2)
Extensive investigation and fine-tuning of control parameters for eight different chaotic maps using nine metaheuristic optimizers are conducted, resulting in the generation of highly secure encryption keys with improved randomness and complexity.
-
(3)
Proposing a novel confusion process using optimized chaotic sequences to permute image pixels, thereby strengthening the encryption scheme and introducing an additional layer of security.
-
(4)
Conducting a comparison between encryption methods with and without optimization, the potential of metaheuristic optimizers is evaluated, and the most effective technique in terms of security and robustness is identified.
-
(5)
Introducing a robust image security algorithm that effectively resists various attacks and distortions, focusing on mitigating the impact of periodic noise, thus enhancing image confidentiality and integrity.
-
(6)
Evaluating the performance of the eight proposed chaotic-based image encryption methods on different standardized images demonstrates the applicability and effectiveness of our approach across various image types and characteristics.

Structure diagram of the proposed system
The rest of this paper is structured as follows. Section 2 presents an overview of related work. Section 3 illustrates chaotic maps. Section 4 demonstrates the different metaheuristic optimizers that are used in this paper. Section 5 presents the model proposed. Section 6 introduces our proposed model’s performance metrics and experimental results. Finally, the conclusions are shown in Sect. 7.
2 Related work
Mozaffari [16] has designed an image encryption system relying on bitplane decomposition and a local binary pattern technique, which converts the plain grayscale image to a group of binary images. After that, pixel substitution and permutation are performed using a genetic algorithm. Finally, the scrambled bitplanes are merged to create an encrypted image. This technology enhanced the encryption speed and allowed it to be used in real-time applications. Talhaoui et al. [17] have suggested an approach to encrypting images relying on the Bülban chaotic map, which produces only a few random columns and rows. Then the substitution-permutation process was used for pixels, and a circular shift was used for rows and columns. At last, the XOR operation and the modulo function are used together to mask the values of the pixels and avoid information leakage. This approach proved to be secure and fast for real-time image processing. Saravanan et al. [18] have proposed an optimized Hybrid Chaotic Map (HCM) approach for image encryption, integrating 2DLCM and PWLCM. Parameter optimization using the Chaos-Induced Whale Optimization Algorithm (CI-WOA) enhances performance and ensures efficient and secure image transmission. Rezaei et al. [19] have presented an evolutionary-based image encryption method using a two-dimensional Henon chaotic map. The parameters of the chaotic map, including α and β, are fine-tuned using the metaheuristic Imperialist Competitive Algorithm (ICA), which ensures that the generated pseudorandom numbers are unique, enhancing the security of the encryption process. Experimental results demonstrate the effectiveness of the proposed method in protecting image content against common attacks. Shahna et al. [20] have introduced a system for encrypting images relying on a symmetric key, cyclic shift operation, scan method, and chaotic map. Diffusion and confusion processes are implemented using the Henon chaotic map and Hilbert curve. Image scrambling involves both bit-level and pixel-level permutations. From the double-scrambled image, the final encrypted image is produced. The proposed technique provides high security. Ghazvini et al. [21] have suggested a hybrid image encryption technique based on chaotic maps and a genetic algorithm. During the confusion phase, Chen’s map of chaos was used, while the logistic-sine map was used during the diffusion phase. The encrypted image is then optimized using a genetic algorithm. The proposed technique is resistant to security attacks. Noshadian et al. [22] have performed an image encryption scheme that employs a chaotic logistic function to change the value of the pixels and a genetic algorithm to decrease the correlation among adjacent pixels. Wang et al. [23] have developed a scheme for encrypting images that relies on logistic maps, DNA sequences, and multi-objective particle swarm optimization. The chaotic logistic map and DNA encoding produce random DNA mask images. Then, particle swarm optimization is used to find the best balance between entropy and correlation. The suggested scheme has good security and is resistant to security attacks. Wang et al. [24] have proposed an image encryption method that uses particle swarm optimization (PSO) to select the parameters and initial values of chaotic systems for generating a high-chaotic sequence. The proposed approach uses the chaotic system parameters and initial values as particles, making it more computationally efficient for real-time applications. The encryption algorithm includes key selection, chaotic sequence pre-processing, block scrambling, expansion, confusion, and diffusion, with the PSO-optimized chaotic sequence used for scrambling and diffusion. Experimental results demonstrate that the proposed method is secure. Ferdush et al. [25] have proposed a method for encrypting images that uses a logistic map, a genetic algorithm, and particle swarm optimization. The logistic map is first used to create the initial population. Then, the genetic algorithm is used to encrypt the image, and the particle swarm optimizer is used to make the best-encrypted image. The entropy of the proposed method is high. Alghafis et al. [26] have utilized an image encryption technique based on chaotic sequencing and DNA. Random sequences are generated using logistic, Henon, and Lorenz chaotic systems. Then, pixel confusion and diffusion are created using DNA computations in combination with the chaotic systems. The security tests revealed that this algorithm is well-suited to encrypt digital images and can also protect the privacy of other digital contents, such as audio and video files. Latha et al. [27] proposed an optimized two-dimensional (2D) chaotic mapping for image encryption. A metaheuristic fitness-based Sea Lion optimization algorithm is used to fine-tune the initial parameters of the chaotic system. This algorithm tries to maximize the information entropy model for chaotic key generation, which leads to the best initial parameters. The experimental results demonstrate that the proposed model has high entropy. Kumar et al. [28] have proposed an algorithm to encrypt images by combining the Henon map with a one-dimensional elementary cellular automaton. The diffusion process uses an elementary cellular automaton, and pseudo-random numbers are generated using the Henon map. The proposed algorithm is resistant to statistical attacks. Babaei et al. [29] have developed a method for encrypting images using DNA, a chaotic map, and recursive cellular automata (RCA). The logistic map is utilized for a cellular shift of the image rows and columns during the permutation phase. The RCA and DNA are then utilized to alter the pixel intensity during the diffusion phase. The proposed algorithm is secure and has good entropy. Ghazanfaripour et al. [30] have presented an approach for encrypting images based on hill diffusion, column-row diffusion, and a 3D scale-invariant modular chaotic map. Column-row diffusion and hill diffusion are used for adjacency pixel mixing in the plain image and pixel substitution. Pixel permutation is done by utilizing 3D scale-invariant chaotic maps. The proposed algorithm has a large key space but takes a long time to execute.
3 Chaotic maps
Chaotic maps are subsets of nonlinear dynamical methods like noise signals but are much more specific [32]. One of the essential things about chaotic maps is that they are very sensitive to initial conditions, which indicates that a slight change in the starting value will significantly affect the output, making them suitable for encrypting images [33, 34]. In this paper, eight chaotic maps have been studied, and their properties have been analysed in order to produce chaotic sequences:
3.1 Logistic map
The following equation has been utilized to define the logistic map:
where \(x\) is the chaotic sequence in the range [0 1], \(n\) is the iteration number, and \(a\) is the control parameter having values in the range [0 4] [35], while the system is chaotic when \(a\), ϵ [3.5699456, 4] [36].
3.2 Sine map
The sine map has been calculated using the following mathematical definition:
where \(x\) is the chaotic sequence in the range [0 1], \(n\) is the iteration number, and \(a\) is the control parameter with values in the range [0 1] [37], while the system is chaotic when \(a\) ϵ [0.87,1] [38].
3.3 Gauss map
Gauss map is also known as mouse map; the gauss map is mathematically formulated as [39]:
where, \(x\) is the chaotic sequence in the range [0 1], and \(n\) is the iteration number [40].
3.4 Circle map
Circle map is one-dimensional chaotic map, and is mathematically formulated as [41]:
where \(x\) is the chaotic sequence in the range [0 1], It has two parameters a and b, the power of non—linearity is represented by parameter a, while the externally applied frequency is represented by parameter b [42].
3.5 Tent map
The following mathematical definition gives the equation of the tent map:
where \(x\) is the chaotic sequence in the range [0 1], \(n\) is the number of iterations, and \(r\) is the control parameter with values in the range [0 2], while the system is chaotic when \(r\) ϵ [1.4, 2] [43].
3.6 Chebyshev map
The following formula describes the Chebyshev map:
where \(x\) is the chaotic sequence in the range [−1 1], \(n\) is the iteration number, and \(a\) is the control parameter with values in the range [0 2], while the system is chaotic when \(a\) ϵ [1 2] [44].
3.7 Singer map
The singer map is mathematically formulated as:
where \(x\) is the chaotic sequence in the range [0 1], \(n\) is the iteration number, and \(\mu\) is the control parameter with values in the range [0 2], while the system is chaotic when \(\mu\) ϵ [0.9 1.08] [45].
3.8 Piecewise map
The piecewise map is calculated using the following equation:
where \(x\) is the chaotic sequence in the range [0 1], \(n\) is the number of iterations, and \(a\) is the control parameter with values in the range [0 2], while the system is chaotic when \(a\) ϵ [1.4, 2] [46]. Figure 2 shows the bifurcation diagram of the chaotic maps, where horizontal axis denotes the parameter r and vertical axis denotes x and each trajectory of the map about x with a fixed x is plotted as dots on the figure.

The bifurcation diagram of a Logistic map, b Sine map, c Gauss map, d Circle map, e Tent map, f Chebyshev map, g Singer map, and h Piecewis map
4 Metaheuristics optimizers
Meta-heuristic optimizers are generally used to obtain optimal solutions. In this paper, the chaotic maps’ initial conditions and control parameters are fine-tuned using the following meta-heuristic optimizers:
4.1 Genetic algorithm (GA)
GA belongs to the wider family of evolutionary algorithms (EA). It involves four steps: selection, mutation, crossover, and inheritance [47, 48]. To simulate the evolution process, GA generates several solutions called population [49]. The initial population is represented using the following equation:
GA uses a fitness evaluation function to determine the fitness value of each solution:
where, \(x\) represents the chromosome, n indicates the size of chromosomes population, \(i\) is the number of chromosomes, and \({P}_{i}\) is the selection probability of the ith chromosome. Accordingly, the crossover and mutation operators have been applied to the best solutions to generate a new population. It chooses the best chromosomes to crossover exactly as it does in nature [50]. Random individuals’ random genes are changing using mutation. The mutation is used to avoid local optimum solutions [51].
4.2 Particle swarm optimization
Eberhart and Kennedy proposed PSO at the end of the 20th century based on their research about bird foraging and migration behaviour [52]. Each group member’s unique perception ability allows them to recognize the best local and global individual positions and adjust their next behavior accordingly [53]. Individuals are viewed as particles in a multi-dimensional search space in the algorithm, with each particle representing a potential solution to the optimization problem. The particle characteristics are described using four parameters: velocity, fitness value, and position [54]. The fitness function determines the fitness value. The particle changes its moving direction and distance independently based on the optimal global fitness value and reaches the best solution by iteration [55]. The population of n particles exists in a D-dimensional space represented by the following equations:
The following equations express the location, velocity and position of the ith particle [56]:
where, \(X_{i}\) is the current location, \(V_{i}\) is the current velocity, \(P_{best}\) is the best local position, and \(g_{best}\) is the best global position. The velocity and position are updated as follows:
where, \(c_{1}\) represents the cognitive acceleration coefficient, and \(c_{2}\) is the social acceleration coefficients.rticles tend to move towardgood areas in the search space in response to information spreadingthrough the swarm. A particle moves to a new position calculatedby the velocity updated at each time step tby Eq. (3). Equation (4) is then used to calculate the new velocity as the sum of the previou
4.3 Whale optimization algorithm
Mirjalili presented WOA for solving and optimizing problems [57]. This algorithm was inspired by the bubble-net attacking technique used by humpback whales [58]. As a result, the WOA is often used in many fields, such as image encryption, energy, structural optimization, management, and so on [59]. Whales have a unique way of chasing a group of krill or small fish in which they build a nine-shaped net with bubbles that capture the fish, allowing them to easily eat the fish. This technique is known as “spiral bubble-net feeding” [60]. The WOA consists of the following three stages:
-
(I)
Encircling prey
Whales use the following formulas to encircle A group of krill or small fish:
where \({\vec{\text{X}}}\) represents the position vector, \(\overrightarrow{{{\mathrm{X}}^{*}}}\) represents the position vector of the best solution, t represents the current iteration, A and C represent coefficient vectors, a is reduced linearly from 2 to 0, and r is a random vector in the range of [0, 1].
-
(II)
Bubble-net attacking method:
The mathematical model for exploitation phase is as follows:
where L denotes a random number between − 1 and 1, b denotes a constant that specifies the logarithmic shape and is the distance between the prey and the whale. Assume that the whale will follow a shrinking mechanism or a spiral path, with a 50% chance of each [61]. The following formula is used to represent this:
where P is a random number in the range [0, 1].
-
(III)
Search for prey
The mathematical model for Exploration phase is as follows:
where \(\vec{X}_{{{\text{rand}} }}\) is position vector selected randomly from the current population.
4.4 Dragonfly algorithm
DA is a randomized search optimizer mimicking a dragonfly swarm’s flying movement [62, 63]. Dragonfly swarms follow the following rules: separation, alignment, cohesion, attraction, and deflection [64, 65]:
-
(I)
Separation (S) The swarms are separated from other individuals in this step, avoiding clashes with neighbours [65]. Separation is calculated using the following equation:
$$s_{i} = - \mathop \sum \limits_{j = 1}^{N} X - X_{j}$$(29)
Where X represents the current individual’s position, \({X}_{j}\) represents the position of j-th neighbouring, and N represents the number of neighbouring individuals.
-
(II)
Alignment (A) This phase describes the process of a dragonfly’s speed adjusting to the speed vectors of other nearby dragonflies in the swarm [66]. This phase is expressed using the following equation:
$$A_{i} = \frac{{\mathop \sum \nolimits_{j = 1}^{N} v_{j} }}{N}$$(30)Where \(v_{j}\) is the velocity of the close individual (j).
-
(III)
Cohesion (C) This phase refers to the swarm’s attraction to the centre of the swarm’s team [67]. The cohesion is calculated using the following equation:
$$c_{i} = \frac{{\mathop \sum \nolimits_{j = 1}^{N} X_{j} }}{N} - X$$(31)Where \(X_{j}\) denotes the location of the jth close individual, and \(X\) denotes the location of the current individual.
-
(IV)
Attraction This phase shows the attraction of swarms toward the food origin [68]. The attraction is calculated using the following equation:
$$F_{i} = X^{ + } - X$$(32)
Where, \(x^{ + }\) denotes the position of the food source, and X denotes the current individual’s location.
-
(V)
Distraction In this phase, the dragonfly is diverted from the enemy [69]. The distraction is computed using the following equation:
Where, \(X^{ - }\) denotes the location of the enemy, and X denotes the current individual’s location. To locate the best solution to a specified optimization problem, DA assigns a step vector and a position vector to every search agent in the swarm [71]. The step vector is calculated using the following equation:
The position vector is updated using the following equation:
where \(s,a, c, f, and e\) denote the weighting factors for separation, alignment, cohesion, attraction, and distraction, and t denotes the current iteration.
4.5 Grey wolf optimization
GWO is an algorithm inspired by swarm intelligence [72], and it is based on the leadership hierarchy and hunting behaviour of grey wolves in their natural habitat [73]. The leadership hierarchy in the model simulation is divided into four wolf types [74]: alpha (the highest level), beta, delta, and omega (the lowest level). The first level begins with the best solution in alpha and progresses downward in order [75, 76]. The steps of GWO are as follows:
-
(I)
Encircling prey The following equations are used to represent the encircling process [76]:
where \(\vec{A}\) denotes random vectors, \(X_{P}\) denotes the prey’s position vector, t denotes the current iteration, victor \(\vec{C}\) has random range of [0 2], and \(\vec{X}\) denotes grey wolf’s position vector. The vectors of coefficients \(\vec{A}\) and \(\vec{C}\) are obtained with the following equations:
-
(II)
Hunting is a behavior driven by alpha, while beta and delta might occasionally play a role [77]. The following formulas demonstrate hunting behavior:
$$\overrightarrow {{D_{\alpha } }} = \left| {\overrightarrow {{C_{1} }} \cdot \vec{X}_{\alpha } - \vec{X}} \right|$$(40)$$\vec{D}_{\beta } = \left| {\overrightarrow {{C_{2} }} \cdot \vec{X}_{B} - \vec{X}} \right|$$(41)$$\vec{D}_{\delta } = \left| {\vec{C}_{3} \cdot \vec{X}_{\delta } - \vec{X}} \right|$$(42)$$\vec{X}_{1} = \vec{X}_{\alpha } - \vec{A}_{1} \cdot \left( {\vec{D}_{\alpha } } \right)$$(43)$$\vec{X}_{2} = \vec{X}_{\beta } - \vec{A}_{2} \cdot \left( {\vec{D}_{\beta } } \right)$$(44)$$\vec{X}_{3} = \vec{X}_{\delta } - \vec{A}_{3} \cdot \left( {\vec{D}_{\delta } } \right)$$(45)$$\vec{X}\left( {t + 1} \right) = \frac{{\vec{X}_{1} + \vec{X}_{2} + \vec{X}_{3} }}{3}$$(46)Where \(\vec{X}_{\alpha } ,{ }\vec{X}_{\beta } ,{ }\&\, \vec{X}_{\delta }\) denote the first three best solutions at iteration \(t\).
-
(III)
Attacking Prey When the prey stops moving, the hunting process ends, the wolves attack, and the values of \(\overrightarrow{a}\) and \(\overrightarrow{A}\) are decreased mathematically [78].
-
(IV)
Search for prey The search phase mainly uses the α, β, and δ positions. Grey wolves look for prey individually before banding together to attack it. To model divergence mathematically [79], the \(\overrightarrow{A}\) is a random value in which if \(\overrightarrow{A}\) > 1, the wolves will diverge, and if \(\overrightarrow{A}\) < 1, the wolves will converge [80].
4.6 Moth-flame optimization
MFO is an algorithm inspired by swarm intelligence [82]. Moreover, it is based on the moths’ transverse orientation navigation method [83]. In MFO, individuals are called moths (M), a population is a group of moths, and the best solution for each moth is called flame (F) [84]. Only one flame for each moth is considered the best solution. This flame will be updated if a better solution arises during the iterations [85]. Moths and flames are generally represented as n * d matrices, where m denotes the number of moths and d denotes the number of dimensions [86]. Following is the moth population matrix:
where N denotes the moth population, \({m}_{1}, {m}_{2}, \cdots ,{m}_{n}\) denotes n moths. The moth’s fitness is calculated once per iteration and saved in a vector called (OM) [87]. Following is the moth’s fitness vector:
The following is the flame matrix (F) and its fitness vector (OF):
where F denotes flame set, \(f_{1} , f_{2} , \cdots ,f_{n}\) denotes n flames. MFO algorithm is composed of the 4 phases listed below [88]:
In the first phase, the moth’s location is updated. The equation to find the best optimal value is given as:
where \(M_{i}\) denotes the ith moth, Fj denotes the jth Flame, and \(S\) denotes the moth’s spiral function.
In the second phase, the moth’s spiral function is calculated using the following equations:
where \({D}_{i}\) denotes the distance from the ith moth to the jth Flame, t denotes a random value between − 1 and 1, and b denotes the spiral shape factor.
In the third phase, the number of flames is updated using the attenuation function [89, 90]. The attenuation function is defined using the following equation:
where R denotes the current number of iterations, T denotes the maximum iterations number, and N denotes the maximum flame number.
In the fourth phase, the best moth is obtained if the termination criterion is met. [91].
4.7 Sine cosine algorithm
SCA is a population-based optimizer that starts with a randomly generated population [92, 93]. The location of solutions is updated using sine and cosine equations [94]. The optimization process uses the exploration phase to find the most desirable location in the search area and the exploitation phase to find the best solution in the proposed region [95]. SCA is expressed as follows:
where \(x_{i}^{t}\) denotes the current solution’s position, \(r_{1}\) denotes a control parameter responsible for achieving the balance between exploitation and exploration, \(r_{2}\), and \(r_{3}\) denote random values, and \(P_{i}^{t}\) denotes the target solution. The two SCA equatns are combined into a single Equation:
r1, r2, r3, and r4 are updated using the following equations:
where \(a\) denotes a constant, \(T\) denotes the maximum number of iterations, \({r}_{2}\) denotes the next solution’s movement direction, \({r}_{3}\) is utilized to identify a random weight for the destination, and \({r}_{4}\) is utilized to toggle between sine and cosine functions [96].
4.8 Multi verse optimization
MVO is a population-based optimizer inspired by the big bang theory and the multi-verse theory [97], which starts with a randomly generated population [98]. MVO algorithm comprises three main principles: White hole, Black hole, and Wormhole [99, 100]. The search space is explored by white holes and black holes, while the search space is exploited by warm holes [101]. Individual development for each population can be conducted using one of the theories concerning the existence of multiple universes [102]. For each iteration, every solution is referred to as a “universe” [103]. The universes are sorted depending on the inflation rates, and one of them is picked to have a white hole using the roulette wheel [104]. MVO is expressed mathematically as follows:
where d denotes the number of the parameters, n denotes the universe’s number, \({X}_{i}^{J}\) denotes the jth parameter of the ith universe, \({X}_{k}^{J}\) denotes the jth parameter of the kth universe, r1 denotes a random value with range [0 1], and \(NI\left({U}_{i}\right)\) denotes the ith universe’s normalized swell rate. An additional operation used to create local modifications for each universe is outlined below [105]:
where \(x_{j}\) denotes the jth parameter of the best universe, \(ub\) denotes the upper limit, \(lb\) denotes the lower limit, TDR denotes travelling distance rate, WEP denotes wormhole existence probability, and r2, r3, and r4 denote random number with range [0 1]. The wormhole existence probability and the Travelling distance rate are calculated using the following equations [106]:
where \(WEP_{max} \& WEP_{min}\) denotes two constantans in which (\(WEP_{max} = 1\, \& \, WEP_{min} = 0.1)\), t denotes iteration, \(t_{max}\) denotes the maximum iterations number, and \(1/n\) denotes exploitation accuracy constant.
4.9 Ant-lion optimization
ALO is inspired by nature and relies on ant lion hunting mechanisms [107]. It simulates the intelligent behaviour of ant lions through the life cycle of larvae [108]. In the ALO, the roulette wheel and random walks of ants are used to eliminate local optima [109]. The ALO algorithm is divided into six stages, which are as follows [110]:
-
(I)
Random walk of prey
Ants (prey) are supposed to walk randomly [111], The following cumulative sum equation represents the random walk:
where \(Cumsum\) denotes the sum, \(t_{i}\) denotes random walk step at the i-th iteration, \(T\) denotes the total number of iterations, and \(r\left( t \right)\) denotes a random function, which is represented in the following equation:
A normalization of position in search space is described using Eq. (69):
where, \(X_{j}^{t}\) denotes the position of j-th variable at iteration t, \(a_{j}\) and \(b_{j}\) denote the minimum and maximum of random walk in the j-th variable, and \(c_{J}^{t}\) and \(d_{j}^{t}\) denote the minimum and maximum of the j-th variable at iteration t.
-
(II)
Building traps
Antlion traps affect the random walk ants [112], as shown by the following equations:
where \(Antlion_{j}^{t}\) represents the j-th position of the antlion at the iteration t.
-
(III)
Setting trap
ALO selects antlions based on their fitness value using a roulette wheel to mimic the antlions’ hunting process [113].
-
(IV)
Sliding of prey in a trap
Once the ants drop into the trap, the antlion tosses sand into the pit’s centre [114]. As a result, the following equations denote the ant’s movement:
where \(I\) denotes a factor based on the ratio of a current iteration to the number of total iterations.
-
(V)
Catching a prey/rebuilding a trap
The following equation defines the final prey capture and repositioning of ant lions.
where \(Ant_{i}^{t}\) denotes the ant’s position at the t-th iteration.
-
(VI)
Elitism rule
The ant’s position is updated based on the roulette wheel’s average and the elite antlion’s movement [115, 116], which is expressed using the following equation:
where \(R_{A}^{t}\) represents the random walk taken by an ant across antlion picked during the process of the roulette wheel selection, and \(R_{E}^{t}\) represents the random walk of the same ant across the elite antlion at the t-th iteration.
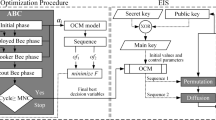
5 Proposed algorithm
Encryption-based chaotic maps are extremely sensitive to initial conditions and control parameters; therefore, the generated sequence will not be chaotic if these parameters are not chosen precisely. The attacker could break the secret key and read the data. Manually picking these seed values takes a long time and is very tedious. As a result, metaheuristic optimizers are used to optimize these parameters. In this algorithm, we compare the performance of different metaheuristic optimizers to tune the control parameters of eight different chaotic maps.
-
First: Meta heuristic optimizing
Meta-heuristic optimizers are used to fine-tune the chaotic maps’ initial conditions and control parameters. In this paper, we compare the performance of nine different meta-heuristic optimizers. The basic steps of optimization are summarized as follows:
-
Step 1 Produce the initial population of individuals.
-
Step 2 Set the objective function, the chaotic map function, whose initial condition and control parameters will be tuned.
-
Step 3 Assessing every individual in the population using the objective function.
-
Step 4 A new population is formed by altering existing population solutions using evolutionary processes.
-
Step 5 The search parameter is updated continuously until it reaches the terminating criteria regarding the number of iterations.
-
Step 6 The algorithm will look for the best solution that meets the objective function at each iteration.
-
Step 7 The obtained solution is used as the chaotic map’s initial condition and control parameter.
-
Second: Chaotic level Confusion:
The original image’s pixels are permuted to decrease the correlation among neighbouring pixels. The basic steps of confusion are summarized as follows:
-
Step 1 Input the original image (I) with dimensions M*N, where M is the row size, and N is the column size.
-
Step 2 Convert the original image (I) to a 1*MN-dimensional vector (V).
-
Step 3 The tuned initial condition and control parameters are used to generate the chaotic sequence vector \(\left( x \right)\).
-
Step 4 The elements of the chaotic sequence vector are sorted using the following equation:
where \(so\) is the newly sorted chaotic sequence vector, and \({\text{i}}n\) is the index of the sorted vector.
-
Step 5
se the following equation to scramble the position of the original image vector (V):
Figure 3 shows a simple illustration of the chaotic level permutation process. Fig. 4.
-
Third diffusion level

Chaotic level Permutation process

Block Diagram of the Encryption Process
The key image is used at this level to diffuse the permuted image. Following is a summary of the fundamental steps of the diffusion level:
-
Step 1 In order to obtain the diffusion vector (D), the following equation is iterated M*N times:
-
Step 2: The 1*MN diffusion vector (D) is multiplied by 255, rounded off, and the absolute value (k) is calculated as follows:
$$k = abs(round\left( {D{*}255} \right)$$(79)
-
Step 3 The obtained vector is converted from decimal to binary using the de2bin function, and then the bits are shifted using a one-bit circular shifting process.
-
Step 4 The shifted vector is converted from binary to decimal (R), and the obtained vector is combined with victor (k) using the exclusive OR operation to generate a key stream.
-
Step 5 The generated key stream is XORed with the permuted image to generate the encrypted image. Fig. 4 shows the block diagram of the proposed encrypting scheme. Algorithm 1 presents the pseudo-code for the Grey Wolf Optimization Algorithm with the Logistic Map. It illustrates one of the approaches used in our study to fine-tune the control parameters of chaotic maps for image encryption. It is important to note that similar procedures were applied to the eight chaotic maps using the nine metaheuristic optimizers. Integrating these optimizers with the respective chaotic maps allowed us to optimize their initial conditions and control parameters, enhancing the overall encryption process. Algorithm 2 represents the pseudo-code for the whole encryption process.


6 Results
6.1 Lyapunov exponent
The Lyapunov exponent (LE) provides a numerical measure for assessing the sensitivity of control parameters in chaotic maps. Its mathematical representation is as follows:
where \(f^{\prime}\left( {x_{i} } \right)\) represents the derivative function of the function f(x), f(x) represents a 1D chaotic map. The parameter n denotes the number of iterations of the chaotic map. Table 1 shows Lyapunov exponents for optimized chaotic maps using metaheuristic optimizers compared to non-optimized maps. A higher Lyapunov exponent indicates stronger chaotic behaviour. The optimized chaotic maps have significantly higher (LE) values, indicating increased chaos. Notably, the optimized maps have higher (LE) values than the non-optimized ones, demonstrating the effectiveness of optimization in enhancing chaotic behaviour.
6.2 Performance metrics
The following performance metrics are used to measure and compare the performance of encryption algorithms based on eight optimized chaotic maps:
6.2.1 Statistical attack analysis
6.2.1.1 Histogram analysis
It represents the frequency of an image’s pixel distribution. The histograms of the primary image are non-uniform. In contrast, the histograms of encrypted images should be uniform to resist statistical attacks. The histograms of plain and encrypted images are shown in Fig. 5. It is noticeable that the histogram distributions of the plain images are unequal. In contrast, the histogram distributions of the encrypted images using encryption algorithms based on the eight chaotic maps are uniform, indicating that each chaotic map resists statistical attacks.


a Original images, b Original image’s histogram, The histogram of the encrypted images using c Logistic map, d Sine map, e Gauss map, f Circle map, g Tent map, h Chebyshev map, i Singer map, and j Piecewis map
6.2.1.2 Entropy analysis
Entropy measures the randomisation of the encrypted image’s pixel intensities. An encryption algorithm with an entropy value of approximately 8 is a robust algorithm. The entropy is calculated using the following formulas:
where, \({\text{E}}\left( {\text{X}} \right){ }\) denotes the entropy of the plain image X, \({\text{p}}\left( {{\text{x}}_{{\text{i}}} } \right){ }\) denotes the occurrence probability, and \({\text{L}}\) denotes total number of the tested pixels. The results in Fig. 6 demonstrate that the encrypted images’ entropy is near the optimal value. However, encrypted images using Tent Chaotic map optimized with SCA has the best entropy. Table 2 demonstrates entropy comparison with other recent algorithms. From the previous results, it is concluded that the proposed algorithm provides the highest entropy value and is robust against entropy attacks.

Entropy of different images
6.2.1.3 Correlation analysis
The correlation coefficient measures how closely two adjacent pixels in a picture are related. It is a term that describes the degree of similarity between two neighbouring pixels in the vertical, horizontal, and diagonal directions. A robust algorithm for image encryption decreases the correlation among neighbouring pixels in the encrypted image. The following formulas are used to calculate the correlation coefficient:
where x denotes the original image, y denotes the cipher image, and L denotes the number of pixels. Figures 7, 8, 9 and 10 illustrate the correlation of neighboring pixels in the three directions for the four images before and after encryption. As per Figs. 7, 8, 9 and 10, the correlation distribution of neighboring pixels in plain images is generally centered along the diagonal, indicating a significant relationship among neighboring pixels. While the correlation of the encrypted images is distributed randomly over the entire area, demonstrating a weak correlation between adjacent pixels. Table 3 displays the numerical results of the correlation among neighbouring pixels of the encrypted images, whereas the results achieved for the encrypted images are close to zero. Table 4 shows the comparison results with other methods. The correlation coefficients of our encryption algorithm are better than the results of the other method. Tables 3 and 4 prove that the proposed algorithm resists correlation attacks.

Shows the correlation for cameraman plain image and the encrypted image

Shows the Correlation for Elaine plain image and encrypted image

Shows the Correlation for Lena plain image and the encrypted image

Shows the Correlation for Peppers plain image and encrypted image
6.2.2 Peak signal to noise ratio analysis (PSNR)
PSNR gives the error between the plain image and the decrypted image. The PSNR is computed based on the mean squared error (MSE).
where, \({\text{X}}\left( {{\text{m}},{\text{n}}} \right)\) presents the original image, \({\text{X}}_{{\text{d}}} \left( {{\text{m}},{\text{n}}} \right)\) presents the decrypted image, and M*N presents the size of both images. All of the PSNR values for the images are 99%, meaning that the original and decrypted images are the same, demonstrating that the proposed model is robust.
6.2.3 Robust analysis
The encryption scheme’s robustness indicates recovering valuable data even when noise disturbs the encrypted image or some data is lost during transmission. In the tests, some noise and different data loss amounts are added.
6.2.3.1 Noise attack analysis
Salt and Pepper, Gaussian, Poisson, and Speckle noise have been added to the encrypted images of Cameraman, Elaine, Lenna, and peppers. Figures 11(a–d) show the encrypted images with the Salt and Pepper intensity of 0.05, the Gaussian noise variance of 0.01, the Poisson, and the Speckle noise, respectively. Figures 11(e–h) show the corresponding decrypted images. From Fig. 11, it can be seen that the decrypted images are clearly visible, which indicates that the algorithm is robust against noise attacks. Moreover, Fig. 12 shows a PSNR comparative analysis of the eight chaotic maps with and without optimization. It can be recognized from Figs. 11 and 12 that Gauss chaotic map with Dragonfly optimizer has the best visual recovery and most reasonable PSNR.

Results of Cipher image with a Salt andPepper noise of intensity 0.05. b Gaussian noise of mean 0 and variance 0.01. c Poisson noise. d Speckle noise; Decryption image with e Salt and Pepper of intensity 0.05; Decryption image with f Gaussian noise of mean 0 and variance 0.01. g Poisson noise. h Speckle noise


PSNR of the recovered images comparative analysis- Different Chaotic maps with different optimizers and with no optimizer
6.2.3.2 Periodic noise
In order to test the algorithm’s robustness, periodic noise has been added to images. The following steps have been taken to recover the image:
-
(1)
Convert the image from the spatial domain to the frequency domain by computing the fast Fourier transform.
-
(2)
Find the periodic noise spikes in the frequency image and block them.
-
(3)
Convert the image back to the spatial domain using the inverse Fourier transform.
Figure 13 demonstrates that despite adding periodic noise, the essential details of the original image can still be retrieved. Figure 14 shows that the decrypted images’ PSNRs are high, demonstrating that the proposed algorithm strongly resists periodic noise attacks.

Results of Periodic noise attack on images “cameraman,” “Elaine,” “Lenna,” and “Peppers”: (a–d) Ciphertext images. (e–h) Decrypted images

PSNRs of the Periodic noise decrypted images and the corresponding plain image
6.2.3.3 Cropping attack
Different degrees of cropping attack tests have been applied to the encrypted images. The cipher images are cropped by 2.25, 12.5, 25, and 50%, respectively, and then decrypted. Figure 16 shows that the decrypted image obtained from the non-optimized Singer chaotic map reveals a partial loss of information, highlighting the importance of chaotic map optimization in achieving a robust image encryption algorithm, where optimization plays a crucial role in preserving the integrity of the encrypted data during decryption. Moreover, Fig. 17 shows the PSNR between the original and recovered images Even though the Singer Chaotic map has the highest PSNR, cropped cipher images can only be reconstructed with optimization, and part of the data is lost, as shown in Figs. 15, 16, and 17. The Gauss chaotic map gives a good PSNR, and the primary information of the plain images can be recovered. It can be concluded that the Gauss Chaotic map has the best numerical and visual results compared to the other chaotic maps, and the Dragonfly algorithm is the best optimizer in terms of robust analysis.

Results of cropping attacks on cipher image using Gauss chaotic map optimized by dragonfly with: a 6.25% cropped. b 12.5% cropped. c 25% cropped. d 50% cropped; Decryption image with e 6.25% cropped. f 12.5% cropped. g 25% cropped. h 50% cropped

Results of cropping attacks on cipher image using Singer chaotic map without optimization with: a 6.25% cropped. b 12.5% cropped. c 25% cropped. d 50% cropped; Decryption image with e 6.25% cropped. f 12.5% cropped. g 25% cropped. h 50% cropped


Comparative analysis of PSNRs of the decrypted images after applying different percentages of cropping attack to the encrypted -Different Chaotic maps with different optimizers and with no optimizer
6.2.3.4 Cropping attack with noise
In this test, a 25% cropping attack with noise has been added to cipher images. It can be shown from Fig. 18 that the decrypted images using the optimized chaotic map successfully reconstructed the original content (Fig. 19), whereas Fig. 20, representing the non-optimized chaotic map, failed to reconstruct the decrypted images. This emphasizes the significance of optimization in achieving robust image encryption. Figure 20 shows the PSNR between the original image and the reconstructed images that match it. Based on these results, it can be declared that the Gauss Chaotic Map encryption algorithm is robust against noise attacks.

Results of 25% cropping attacks on cipher image using Gauss chaotic map optimized by dragonfly with a Salt andPepper noise of intensity 0.05. b Gaussian noise of mean 0 and variance 0.01. c Poisson noise. d Speckle noise; Decryption image with e Salt and Pepper of intensity 0.05; Decryption image with f Gaussian noise of mean 0 and variance 0.01. g Poisson noise. h Speckle noise

Results of 25% cropping attacks on cipher image using Singer chaotic map without optimization with a Salt andPepper noise of intensity 0.05. b Gaussian noise of mean 0 and variance 0.01. c Poisson noise. d Speckle noise; Decryption image with e Salt and Pepper of intensity 0.05; Decryption image with f Gaussian noise of mean 0 and variance 0.01. g Poisson noise. h Speckle noise


Comparative analysis of PSNRs of the decrypted images after applying noise and cropping attack to the encrypted -Different Chaotic maps with different optimizers and with no optimizer
6.2.4 Key analysis
6.2.4.1 Key space analysis
The analysis of the key space refers to the collection of all possible encryption keys. A robust encryption algorithm must be sensitive to secret keys and have enough space to withstand any brute-force attack. The proposed algorithm uses the chaotic map parameters, initial conditions, and the parameters of the diffusion equation as keys. The key space of the proposed algorithm for the different types of chaotic maps with a computation precision of \(({10}^{-16})\) is shown in Table 5, which demonstrates that the key space of the proposed encryption algorithm is sufficiently large to resist brute-force attacks, with the Circle Chaotic map having the most robust key space. Table 6 compares the key spaces of different encryption techniques. The proposed algorithm has a large key space and is resistant to brute-force attacks, as seen in Table 6.
6.2.4.2 Key sensitivity analysis
Key sensitivity examines the sensitivity of a cipher image to a very slight change in the secret key. Figure 21a indicates decryption with the correct key x = 0.777; the encrypted image is identical to the original image; then the ciphered image is decrypted using one bit changed key x = 0.7770000000000000001. as shown in Fig. 21b, shows that the cipher image could not be decrypted then the ciphered image is decrypted using a one-bit changed key x = 0.7770000000000000001. As shown in Fig. 21b, the cipher image could not be decrypted. Consequently, the proposed algorithm is highly sensitive to secret keys.

Decrypting Lena image using the a correct key and b wrong key
6.2.5 Differential analysis
6.2.5.1 Number of pixel change rate
It is the proportion of changed pixel numbers between two encrypted images with a one-pixel change in the original image. The following are the formulas used to compute the NPCR:
where \(Y_{1} \left( {i,j} \right) \& Y_{2} \left( {i,j} \right)\) denote two encrypted images corresponding to the same original image differing only in one bit, and M*N is the size of the images.
6.2.5.2 Unified average changing intensity
It calculates the average difference in intensity between two ciphered images, which corresponds to a change of one pixel in the original image. The following equation is utilized to calculate the UACI:
where \({Y}_{1}\left(i,j\right) and {Y}_{2}\left(i,j\right)\) denote two ciphered images corresponding to the same plain image, differing only by one bit, and M*N is the size of the images. Table 7 shows the results of UACI and NPCR for encryption algorithms using the eight optimized chaotic maps. As seen from Table 4, all results of UACI and NPCR are closer to theoretical values except when using all the chaotic maps without optimization, giving the lowest UACI and NPCR. From the previous results, the optimized eight chaotic maps demonstrate effective resistance to differential attacks. Tables 7 and 8 compare UACI and NPCR with other encryption algorithms, which indicates that the proposed algorithm has the highest sensitivity and is competitive with other proposed encryption methods (Table 9).
6.2.6 Computational speed analysis
It is the time required to execute the algorithm, measured in seconds or milliseconds. Figure 22 compares the time of execution for the eight optimized chaotic maps. It can be observed that the chaotic tent map has a relatively higher computational time than the other chaotic maps. The results regarding computational time for all images demonstrate that the gauss chaotic map has the lowest computational time compared to the other chaotic maps and that using the chaotic maps without optimization has the highest computational time. The proposed algorithm provides the fastest encryption speed, as shown in Table 10.

Encryption time/ decryption time (sec) of the proposed algorithm
7 Conclusion
This paper aims to propose an image encryption scheme using optimized chaotic maps. Eight chaotic maps (logistics, sine, gauss, circle, tent, Chebyshev, singer, and piecewise map) are optimized using various metaheuristic optimizers. The encryption process involves chaotic confusion and pixel diffusion. Performance metrics such as entropy, histogram, cross-correlation, computation time, NPCR, UACI, noise attack, data loss, and key analysis are employed to evaluate the proposed scheme. The evaluation of the proposed encryption scheme yielded significant findings. The correlation coefficient values of encrypted images are nearly zero, indicating high security. The histogram analysis reveals uniform distributions, preventing information leakage. The execution time for encryption is recorded as 0.1556 ms, demonstrating real-time applicability. The key space reaches 10^80, ensuring a large key space for robustness. The NPCR value is measured at 99.63%, and the UACI value is 32.92%, further indicating the effectiveness of the encryption scheme. Moreover, the analysis of noise and cropping attacks confirms the robustness of the proposed scheme. Comparative evaluations against other algorithms support the superior performance of the optimized encryption algorithms.
Data availability
The data that support the findings of this study are available within this article.
References
Hua Z, Zhu Z, Yi S, Zhang Z, Huang H (2021) Cross-plane colour image encryption using a two-dimensional logistic tent modular map. Inf Sci 546:1063–1083
Ahmad M, Agarwal S, Alkhayyat A, Alhudhaif A, Alenezi F, Zahid AH, Aljehane NO (2022) An image encryption algorithm based on new generalized fusion fractal structure. Inf Sci 592:1–20
Roy M, Chakraborty S, Mali K, Roy D, Chatterjee S (2021) A robust image encryption framework based on DNA computing and chaotic environment. Microsyst Technol 27(10):3617–3627
Elkamchouchi H, Anton R, Abouelseoud Y (2022) New encryption algorithm for secure image transmission through open network. Wirel Personal Commun 2022:1–18
Fu J, Gan Z, Chai X, Yang Lu (2022) Cloud-decryption-assisted image compression and encryption based on compressed sensing. Multimed Tools Appl 81(12):17401–17436
Arif J, Khan MA, Ghaleb B, Ahmad J, Munir A, Rashid U, Al-Dubai AY (2022) A novel chaotic permutation-substitution image encryption scheme based on logistic map and random substitution. IEEE Access 10:12966–12982
Abduljabbar ZA, Abduljaleel IQ, Ma J, Al Sibahee MA, Nyangaresi VO, Honi DG, Abdulsada AI, Jiao X (2022) Provably secure and fast color image encryption algorithm based on s-boxes and hyperchaotic map. IEEE Access 10:26257–26270
Song W, Zheng Yu, Chong Fu, Shan P (2020) A novel batch image encryption algorithm using parallel computing. Inf Sci 518:211–224
Huang X, Dong Y, Zhu H, Ye G (2022) Visually asymmetric image encryption algorithm based on SHA-3 and compressive sensing by embedding encrypted image. Alex Eng J 61(10):7637–7647
Mir UH, Singh D, Lone PN (2022) Color image encryption using RSA cryptosystem with a chaotic map in Hartley domain. Inf Secur J Global Perspect 31(1):49–63
Bao W, Zhu C (2022) A secure and robust image encryption algorithm based on compressive sensing and DNA coding. Multimed Tools Appl 81(11):15977–15996
Ye G, Liu M, Mingfa Wu (2022) Double image encryption algorithm based on compressive sensing and elliptic curve. Alex Eng J 61(9):6785–6795
Isaac SD, Njitacke ZT, Tsafack N, Tchapga CT, Kengne J (2022) Novel compressive sensing image encryption using the dynamics of an adjustable gradient Hopfield neural network. Eur Phys J Special Topics 231(10):1995–2016
Belazi A, Kharbech S, Aslam MN, Talha M, Xiang W, Iliyasu AM, Abd El-Latif AA (2022) Improved sine-tangent chaotic map with application in medical images encryption. J Inf Secur Appl 66:103131
Muthu JS, Murali P (2021) Review of chaos detection techniques performed on chaotic maps and systems in image encryption. SN Comput Sci 2(5):1–24
Mozaffari S (2018) Parallel image encryption with bitplane decomposition and genetic algorithm. Multimed Tools Appl 77(19):25799–25819
Talhaoui MZ, Wang X, Midoun MA (2021) Fast image encryption algorithm with high security level using the Bülban chaotic map. J Real-Time Image Process 18(1):85–98
Saravanan S, Sivabalakrishnan M (2021) A hybrid chaotic map with coefficient improved whale optimization-based parameter tuning for enhanced image encryption. Soft Comput 25:5299–5322
Rezaei B, Ghanbari H, Enayatifar R (2023) An image encryption approach using tuned Henon chaotic map and evolutionary algorithm. Nonlinear Dyn 111(10):9629–9647
Shahna KU, Mohamed A (2020) A novel image encryption scheme using both pixel level and bit level permutation with chaotic map. Appl Soft Comput 90:106162
Ghazvini M, Mirzadi M, Parvar N (2020) A modified method for image encryption based on chaotic map and genetic algorithm. Multimed Tools Appl 79(37):26927–26950
Noshadian S, Ebrahimzade A, Kazemitabar SJ (2020) Breaking a chaotic image encryption algorithm. Multimed Tools Appl 79(35):25635–25655
Wang X, Li Y (2021) Chaotic image encryption algorithm based on hybrid multi-objective particle swarm optimization and DNA sequence. Opt Lasers Eng 137:106393
Wang J, Song X, El-Latif AA (2022) Single-objective particle swarm optimization-based chaotic image encryption scheme. Electronics 11(16):2628
Ferdush J, Mondol G, Prapti AP, Begum M, Sheikh MN, Galib SM (2021) An enhanced image encryption technique combining genetic algorithm and particle swarm optimization with chaotic function. Int J Comput Appl 43(9):960–967
Alghafis A, Firdousi F, Khan M, Batool SI, Amin M (2020) An efficient image encryption scheme based on chaotic and Deoxyribonucleic acid sequencing. Math Comput Simul 177:441–466
Latha HR, Ramaprasath A. (2022) Optimized two-dimensional chaotic mapping for enhanced image security using sea lion algorithm. In: Emerging research in computing, information, communication and applications: ERCICA 2020, Springer Singapore, Vol 2, pp 981–998
Kumar A, Raghava NS (2021) An efficient image encryption scheme using elementary cellular automata with novel permutation box. Multimed Tools Appl 80(14):21727–21750
Babaei A, Motameni H, Enayatifar R (2020) A new permutation-diffusion-based image encryption technique using cellular automata and DNA sequence. Optik 203:164000
Ghazanfaripour H, Broumandnia A (2020) Designing a digital image encryption scheme using chaotic maps with prime modular. Opt Laser Technol 131:106339
Abd Elminaam DS, Ibrahim SA, Houssein EH, Elsayed SM (2022) An efficient chaotic gradient-based optimizer for feature selection. IEEE Access 10:9271–9286
Naik RB, Singh U (2022) A review on applications of chaotic maps in pseudo-random number generators and encryption. Ann Data Sci 18:1–26
Munir N, Khan M, Abd Al Karim Haj Ismail A, Hussain I (2022) Cryptanalysis and improvement of novel image encryption technique using hybrid method of discrete dynamical chaotic maps and brownian motion. Multimed Tools Appl 81(5):6571–6584
Lyle M, Sarosh P, Parah SA (2022) Adaptive image encryption based on twin chaotic maps. Multimed Tools Appl 81(6):8179–8198
Wang X, Chen S, Zhang Y (2021) A chaotic image encryption algorithm based on random dynamic mixing. Opt Laser Technol 138:106837
Yan X, Wang X, Xian Y (2021) Chaotic image encryption algorithm based on arithmetic sequence scrambling model and DNA encoding operation. Multimed Tools Appl 80(7):10949–10983
Demir FB, Tuncer T, Kocamaz AF (2020) A chaotic optimization method based on logistic-sine map for numerical function optimization. Neural Comput Appl 32(17):14227–14239
Mansouri A, Wang X (2020) A novel one-dimensional sine powered chaotic map and its application in a new image encryption scheme. Inf Sci 520:46–62
Mozaffari A, Emami M, Fathi A (2019) A comprehensive investigation into the performance, robustness, scalability and convergence of chaos-enhanced evolutionary algorithms with boundary constraints. Artif Intell Rev 52(4):2319–2380
Arora S, Sharma M, Anand P (2020) A novel chaotic interior search algorithm for global optimization and feature selection. Appl Artif Intell 34(4):292–328
Khan M, Masood F (2019) A novel chaotic image encryption technique based on multiple discrete dynamical maps. Multimed Tools Appl 78(18):26203–26222
Arora S, Anand P (2019) Chaotic grasshopper optimization algorithm for global optimization. Neural Comput Appl 31(8):4385–4405
Parameshachari BD, Panduranga HT (2022) Medical image encryption using SCAN technique and chaotic tent map system. In: Recent advances in artificial intelligence and data engineering, Springer, Singapore, pp 181–193
Ryu J, Kang D, Won D (2022) Improved secure and efficient chebyshev chaotic map-based user authentication scheme. IEEE Access 10:15891–15910
Aydemir SB (2022) A novel arithmetic optimization algorithm based on chaotic maps for global optimization. Evolut Intell 12:1–16
Ali TS, Ali R (2022) A novel color image encryption scheme based on a new dynamic compound chaotic map and S-box. Multimed Tools Appl 81(15):20585–20609
Sokhangoee ZF, Rezapour A (2022) A novel approach for spam detection based on association rule mining and genetic algorithm. Comput Electr Eng 97:107655
Pal S, Kalita K, Haldar S (2022) Genetic algorithm-based fundamental frequency optimization of laminated composite shells carrying distributed mass. J Inst Eng India: Series C 2022:1–13
Katoch S, Chauhan SS, Kumar V (2021) A review on genetic algorithm: past, present, and future. Multimed Tools Appl 80(5):8091–8126
Saleh A, Yuzir A, Sabtu N, Abujayyab SK, Bunmi MR, Pham QB (2022) Flash flood susceptibility mapping in urban area using genetic algorithm and ensemble method. Geocarto Int 21:1–30
Blanchard AE, Shekar MC, Gao S, Gounley J, Lyngaas I, Glaser J, Bhowmik D (2022) Automating genetic algorithm mutations for molecules using a masked language model. IEEE Trans Evolut Comput 26(4):793–799
Xu Y, Caihong Hu, Qiang Wu, Jian S, Li Z, Chen Y, Zhang G, Zhang Z, Wang S (2022) Research on particle swarm optimization in LSTM neural networks for rainfall-runoff simulation. J Hydrol 608:127553
Jahandideh-Tehrani M, Bozorg-Haddad O, Loáiciga HA (2020) Application of particle swarm optimization to water management: an introduction and overview. Environ Monit Assess 192(5):1–18
Shami TM, El-Saleh AA, Alswaitti M, Al-Tashi Q, Summakieh MA, Mirjalili S (2022) Particle swarm optimization: a comprehensive survey. IEEE Access 10:10031–10061
Huda RK, Banka H (2020) New efficient initialization and updating mechanisms in PSO for feature selection and classification. Neural Comput Appl 32(8):3283–3294
Parouha RP, Verma P (2022) A systematic overview of developments in differential evolution and particle swarm optimization with their advanced suggestion. Appl Intell 52(9):10448–10492
Chakraborty S, Saha AK, Sharma S, Mirjalili S, Chakraborty R (2021) A novel enhanced whale optimization algorithm for global optimization. Comput Ind Eng 153:107086
Dewi SK, Utama DM (2021) A new hybrid whale optimization algorithm for green vehicle routing problem. Syst Sci Control Eng 9(1):61–72
Chakraborty S, Sharma S, Saha AK, Saha A (2022) A novel improved whale optimization algorithm to solve numerical optimization and real-world applications. Art Intell Rev 1:1–112
Xu X, Liu C, Zhao Y, Lv X (2022) Short-term traffic flow prediction based on whale optimization algorithm optimized BiLSTM_Attention. Concurr Comput: Practice Exp 34(10):e6782
Tang C, Sun W, Xue M, Zhang X, Tang H, Wei Wu (2022) A hybrid whale optimization algorithm with artificial bee colony. Soft Comput 26(5):2075–2097
Chatterjee S, Biswas S, Majee A, Sen S, Oliva D, Sarkar R (2022) Breast cancer detection from thermal images using a Grunwald-Letnikov-aided Dragonfly algorithm-based deep feature selection method. Comput Biol Med 141:105027
Yang D, Mingliang Wu, Li Di, Yunlang Xu, Zhou X, Yang Z (2022) Dynamic opposite learning enhanced dragonfly algorithm for solving large-scale flexible job shop scheduling problem. Knowl-Based Syst 238:107815
Jothi S, Chandrasekar A (2022) An efficient modified dragonfly optimization based mimo-ofdm for enhancing qos in wireless multimedia communication. Wireless Pers Commun 122(2):1043–1065
Latchoumi TP, Parthiban L (2022) Quasi oppositional dragonfly algorithm for load balancing in cloud computing environment. Wireless Pers Commun 122(3):2639–2656
Meraihi Y, Ramdane-Cherif A, Acheli D, Mahseur M (2020) Dragonfly algorithm: a comprehensive review and applications. Neural Comput Appl 32(21):16625–16646
Zhong L, Zhou Y, Luo Q, Zhong K (2021) Wind driven dragonfly algorithm for global optimization. Concurr Comput: Pract Exp 33(6):e6054
Chantar H, Tubishat M, Essgaer M, Mirjalili S (2021) Hybrid binary dragonfly algorithm with simulated annealing for feature selection. SN Comput Sci 2(4):1–11
Vedik B, Kumar R, Deshmukh R, Verma S, Shiva CK (2021) Renewable energy-based load frequency stabilization of interconnected power systems using quasi-oppositional dragonfly algorithm. J Control, Autom Electr Syst 32(1):227–243
Pitchipoo P, Muthiah A, Jeyakumar K, Manikandan A (2021) Friction stir welding parameter optimization using novel multi objective dragonfly algorithm. Int J Lightweight Mater Manufact 4(4):460–467
Too J, Mirjalili S (2021) A hyper learning binary dragonfly algorithm for feature selection: a COVID-19 case study. Knowl-Based Syst 212:106553
Musharavati F, Khoshnevisan A, Alirahmi SM, Ahmadi P, Khanmohammadi S (2022) Multi-objective optimization of a biomass gasification to generate electricity and desalinated water using Grey Wolf Optimizer and artificial neural network. Chemosphere 287:131980
Meidani K, Hemmasian A, Mirjalili S, Barati Farimani A (2022) Adaptive grey wolf optimizer. Neural Comput Appl 34(10):7711–7731
Cui F, Al-Sudani ZA, Hassan GS, Afan HA, Ahammed SJ, Yaseen ZM (2022) Boosted artificial intelligence model using improved alpha-guided grey wolf optimizer for groundwater level prediction: comparative study and insight for federated learning technology. J Hydrol 606:127384
Qaraad M, Amjad S, Hussein NK, Elhosseini MA (2022) Large scale salp-based grey wolf optimization for feature selection and global optimization. Neural Comput Appl 34(11):8989–9014
Zhou J, Huang S, Zhou T, Armaghani DJ, Qiu Y (2022) Employing a genetic algorithm and grey wolf optimizer for optimizing RF models to evaluate soil liquefaction potential. Art Intell Rev 55(7):5673–5705
Mirjalili S, Aljarah I, Mafarja M, Heidari AA, Faris H (2020) Grey wolf optimizer: theory, literature review, and application in computational fluid dynamics problems. Nat-inspired Optim 2020:87–105
Khalilpourazari S, Doulabi HH, Çiftçioğlu AÖ, Weber GW (2021) Gradient-based grey wolf optimizer with Gaussian walk: application in modelling and prediction of the COVID-19 pandemic. Expert Syst Appl 177:114920
Nadimi-Shahraki MH, Taghian S, Mirjalili S (2021) An improved grey wolf optimizer for solving engineering problems. Expert Syst Appl 166:113917
Bansal JC, Singh S (2021) A better exploration strategy in Grey Wolf Optimizer. J Amb Intell Human Comput 12(1):1099–1118
Ghalambaz M, Yengejeh RJ, Davami AH (2021) Building energy optimization using grey wolf optimizer (GWO). Case Stud Thermal Eng 27:101250
Zhao X, Fang Y, Liu Le, Miao Xu, Li Q (2022) A covariance-based Moth–flame optimization algorithm with Cauchy mutation for solving numerical optimization problems. Appl Soft Comput 119:108538
Li X, Qi X, Liu X, Gao C, Wang Z, Zhang F, Liu J (2022) A discrete moth-flame optimization with an $ l_2 $-Norm constraint for network clustering. IEEE Trans Netw Sci Eng 9(3):1776–1788
Long B, Yang W, Hu Q, Guerrero JM, Garcia C, Rodriguez J, Chong KT (2022) Moth–Flame-optimization-based parameter estimation for FCS-MPC-controlled grid-connected converter with LCL filter. IEEE J Emerg Selected Topics Power Electron 10(4):4102–4114
Zhang Yu, Wang P, Yang H, Cui Qi (2022) Optimal dispatching of microgrid based on improved moth-flame optimization algorithm based on sine mapping and Gaussian mutation. Syst Sci Control Eng 10(1):115–125
Shehab M, Alshawabkah H, Abualigah L, Al-Madi N (2021) Enhanced a hybrid moth-flame optimization algorithm using new selection schemes. Eng Comput 37(4):2931–2956
Chatterjee S, Mohammed AN (2022) Performance evaluation of novel moth flame optimization (MFO) technique for AGC of hydro system. In: IOT with smart systems. Springer, Singapore, pp 377–392
Wu H-H, Ke G, Wang Y, Chang Y-T (2022) Prediction on recommender system based on bi-clustering and moth flame optimization. Appl Soft Comput 120:108626
Mittal T (2022) A hybrid moth flame optimization and variable neighbourhood search technique for optimal design of IIR filters. Neural Comput Appl 34(1):689–704
Neelamkavil Pappachan S (2022) Hybrid red deer with moth flame optimization for reconfiguration process on partially shaded photovoltaic array. Energy Sourc, Part A: Recov, Utiliz Environ Effects 5:1–27
Zhang Bo, Tan R, Lin C-J (2021) Forecasting of e-commerce transaction volume using a hybrid of extreme learning machine and improved moth-flame optimization algorithm. Appl Intell 51(2):952–965
Xia J, Yang D, Zhou H, Chen Y, Zhang H, Liu T, Heidari AA, Chen H, Pan Z (2022) Evolving kernel extreme learning machine for medical diagnosis via a disperse foraging sine cosine algorithm. Comput Biol Med 141:105137
Al-Betar MA, Awadallah MA, Zitar RA, Assaleh K (2022) Economic load dispatch using memetic sine cosine algorithm. J Amb Intell Human Comput 7:1–29
Abualigah L, Ewees AA, Al-qaness MA, Elaziz MA, Yousri D, Ibrahim RA, Altalhi M (2022) Boosting arithmetic optimization algorithm by sine cosine algorithm and levy flight distribution for solving engineering optimization problems. Neural Comput Appl 34(11):8823–8852
Gupta S, Zhang Yi, Rong Su (2022) Urban traffic light scheduling for pedestrian–vehicle mixed-flow networks using discrete sine–cosine algorithm and its variants. Appl Soft Comput 120:108656
Abdel-Mawgoud H, Fathy A, Kamel S (2022) An effective hybrid approach based on arithmetic optimization algorithm and sine cosine algorithm for integrating battery energy storage system into distribution networks. J Energy Storage 49:104154
Rayaguru NK, Sekar S (2022) Modified multiverse optimization, perturb and observer algorithm-based MPPT for grid-connected photovoltaic system. In: Proceedings of International Conference on Power Electronics and Renewable Energy Systems. Springer, Singapore, pp 647–658
Anshuman A, Eldho TI (2022) Entity aware sequence to sequence learning using LSTMs for estimation of groundwater contamination release history and transport parameters. J Hydrol 608:127662
Fu Y, Zhou MC, Guo X, Qi L, Sedraoui K (2021) Multiverse optimization algorithm for stochastic biobjective disassembly sequence planning subject to operation failures. IEEE Trans Syst, Man, Cyber: Syst 52(2):1041–1051
Chouksey M, Jha RK (2021) A multiverse optimization based colour image segmentation using variational mode decomposition. Expert Syst Appl 171:114587
Chouksey M, Jha RK (2021) A joint entropy for image segmentation based on quasi opposite multiverse optimization. Multimed Tools Appl 80(7):10037–10074
Zhu W, Huang L, Mao L, Esmaeili-Falak M (2022) Predicting the uniaxial compressive strength of oil palm shell lightweight aggregate concrete using artificial intelligence-based algorithms. Struct Concr. https://doi.org/10.1002/suco.202100656
Liu J, Wei J, Heidari AA, Kuang F, Zhang S, Gui W, Chen H, Pan Z (2022) Chaotic simulated annealing multi-verse optimization enhanced kernel extreme learning machine for medical diagnosis. Comput Biol Med 144:105356
Nazari N, Mousavi S, Mirjalili S (2021) Exergo-economic analysis and multi-objective multi-verse optimization of a solar/biomass-based trigeneration system using externally-fired gas turbine, organic Rankine cycle and absorption refrigeration cycle. Appl Therm Eng 191:116889
Zhang X, Nguyen H, Choi Y, Bui X-N, Zhou J (2021) Novel extreme learning machine-multi-verse optimization model for predicting peak particle velocity induced by mine blasting. Nat Resour Res 30(6):4735–4751
Aljarah I, Faris H, Heidari AA, Mafarja MM, Ala’M AZ, Castillo PA, Merelo JJ (2021) A robust multi-objective feature selection model based on local neighborhood multi-verse optimization. IEEE Access 9:100009–100028
Kavitha J, Thirupathi Rao K (2022) Dynamic resource allocation in cloud infrastructure using ant lion-based auto-regression model. Int J Commun Syst 35(6):e5071
Li Q, Li D, Zhao K, Wang L, Wang K (2022) State of health estimation of lithium-ion battery based on improved ant lion optimization and support vector regression. J Energy Storage 50:104215
Manikanda Selvam S, Yuvaraj T. (2022) Optimal allocation of capacitor using ant lion optimization algorithm. In: Proceedings of International Conference on Data Science and Applications. Springer, Singapore, pp 279–286
Soesanti I, Syahputra R (2022) Multiobjective ant lion optimization for performance improvement of modern distribution network. IEEE Access 10:12753–12773
Zhou Z, Ji H, Yang X (2022) Illumination correction of dyed fabric based on extreme learning machine with improved ant lion optimizer. Color Res Appl 47(4):1065–1077
Kesarwani S, Verma RK (2022) Ant Lion Optimizer (ALO) algorithm for machinability assessment during Milling of polymer composites modified by zero-dimensional carbon nano onions (0D-CNOs). Measurement 187:110282
Niu G, Li X, Wan X, He X, Zhao Y, Yi X, Chen C, Xujun L, Ying G, Huang M (2022) Dynamic optimization of wastewater treatment process based on novel multi-objective ant lion optimization and deep learning algorithm. J Clean Prod 345:131140
Vennila H, Rajesh R. (2022) Ant lion optimization for solving combined economic and emission dispatch problems. In: Machine learning and autonomous systems, Springer, Singapore pp 639–649
M’Hamdi B, Benmahamed Y, Teguar M, Taha IB, Ghoneim SS (2022) Multi-objective optimization of 400 kV composite insulator corona ring design. IEEE Access 10:27579–27590
Veramalla R, Arya SR, Gundeboina V, Jampana B, Chilipi R, Madasthu S (2022) Meta-heuristics algorithms for optimization of gains for dynamic voltage restorers to improve power quality and dynamics. Opt Control Appl Methods 44(2):1006–1025
Midoun MA, Wang X (2021) Talhaoui MZ A sensitive dynamic mutual encryption system based on a new 1D chaotic map. Optics Lasers Eng 139:106485
Zhang S, Liu L (2021) A novel image encryption algorithm based on SPWLCM and DNA coding. Math Comput Simul 190:723–744
Wang X, Sun H (2020) A chaotic image encryption algorithm based on improved Joseph traversal and cyclic shift function. Opt Laser Technol 122:105854
Muñoz-Guillermo M (2021) Image encryption using q-deformed logistic map. Inf Sci 552:352–364
Liu X, Xiao Di, Liu C (2021) Three-level quantum image encryption based on Arnold transform and logistic map. Quantum Inf Process 20(1):1–22
Wang X, Guan N, Liu P (2022) A selective image encryption algorithm based on a chaotic model using modular sine arithmetic. Optik 258:168955
Guo Z, Sun P (2022) Improved reverse zigzag transform and DNA diffusion chaotic image encryption method. Multimed Tools Appl 81(8):11301–11323
Liu X, Tong X, Wang Z, Zhang M (2022) A new n-dimensional conservative chaos based on generalized hamiltonian system and its’ applications in image encryption. Chaos, Solitons Fractals 154:111693
Patro KA, Acharya B (2021) An efficient dual-layer cross-coupled chaotic map security-based multi-image encryption system. Nonlinear Dyn 104(3):2759–2805
Zareai D, Balafar M, Derakhshi MRF (2021) A new Grayscale image encryption algorithm composed of logistic mapping, Arnold cat, and image blocking. Multimed Tools Appl 80(12):18317–18344
Khalil N, Sarhan A, Alshewimy MA (2021) An efficient color/grayscale image encryption scheme based on hybrid chaotic maps. Opt Laser Technol 143:107326
Wang X, Gao S (2021) A chaotic image encryption algorithm based on a counting system and the semi-tensor product. Multimed Tools Appl 80(7):10301–10322
Wang X, Gao S (2020) Image encryption algorithm for synchronously updating Boolean networks based on matrix semi-tensor product theory. Inf Sci 507:16–36
Mondal B, Behera PK, Gangopadhyay S (2021) A secure image encryption scheme based on a novel 2D sine–cosine cross-chaotic (SC3) map. J Real-Time Image Process 18(1):1–18
Jan A, Parah SA, Malik BA (2022) IEFHAC: image encryption framework based on hessenberg transform and chaotic theory for smart health. Multimed Tools Appl 81(13):18829–18853
Xu S, Chang C-C, Liu Y (2021) A high-capacity reversible data hiding scheme for encrypted images employing vector quantization prediction. Multimed Tools Appl 80(13):20307–20325
Wu H, Li F, Qin C, Wei W (2019) Separable reversible data hiding in encrypted images based on scalable blocks. Multimed Tools Appl 78(18):25349–25372
Kamrani A, Zenkouar K, Najah S (2020) A new set of image encryption algorithms based on discrete orthogonal moments and Chaos theory. Multimed Tools Appl 79(27):20263–20279
Yu W, Liu Ye, Gong L, Tian M, Liangqiang Tu (2019) Double-image encryption based on spatiotemporal chaos and DNA operations. Multimed Tools Appl 78(14):20037–20064
Premkumar R, Anand S (2019) Secured and compound 3-D chaos image encryption using hybrid mutation and crossover operator. Multimed Tools Appl 78(8):9577–9593
Acknowledgements
The authors declare that there is no conflict of interest regarding the manuscript.
Funding
There is no funding to declare regarding this manuscript.
Author information
Authors and Affiliations
Contributions
SMS Conceptualization, Methodology, Software, Data curation, Visualization and Investigation. HE-DM Supervision, Reviewing and EEHA Supervision, Reviewing and Editing. MMA Supervision, Methodology, Software, Data curation, Writing- Original draft preparation, Reviewing and Editing.
Corresponding author
Ethics declarations
Conflict of interest
We confirm that the manuscript has been read and approved by all named authors and that there are no other persons who satisfied the criteria for authorship but are not listed. We further confirm that the order of authors listed in the manuscript has been approved by all of us. No potential competing interest was reported by the authors.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Sameh, S.M., Moustafa, H.ED., AbdelHay, E.H. et al. An effective chaotic maps image encryption based on metaheuristic optimizers. J Supercomput 80, 141–201 (2024). https://doi.org/10.1007/s11227-023-05413-x
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11227-023-05413-x