
Abstract
The recent technological advancements such as IoT-enabled sensor nodes, Global Positioning System, Wi-Fi transceivers, and lightweight lithium-ion batteries enable the use of Unmanned Aerial Vehicles (UAV) for data collection in wireless sensor networks. In a UAV-assisted wireless sensor network (UAV-WSN), the sensor nodes are installed at the ground and a UAV works as the sink node. The UAV-based sink flies over the sensed region and receives the data packets of surrounding ground nodes. A UAV-WSN offers improved data collection efficiency as the UAV-based sink avoids the ground obstacles and establishes line-of-sight communication with the ground sensor nodes. However, the UAV’s flight trajectory needs to be optimized to achieve minimized UAV energy consumption during flight operation and minimized node energy consumption in data transmission. This paper presents a hybrid data routing protocol for UAV-WSN that considers optimized planning of the UAV’s flight trajectory in parallel with energy-efficient data communication amid ground sensor nodes and the UAV. The presented scheme utilizes multi-objective NSGA-II optimization heuristics to optimize UAV’s flight trajectory. The developed NSGA-II model evolves into an optimal UAV flight trajectory that simultaneously achieves the objectives of minimized UAV energy consumption, minimized node energy consumption, and maximized average RSSI. A maximized RSSI further brings about a significant increase in network throughput rate. Simulation results depict that the proposed UAV-WSN scheme achieves improved network lifetime and network throughput rate compared to other state-of-the-art protocols.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
A Wireless Sensor Network (WSN) integrates the sensing, computational and communication capabilities of distributed sensor nodes with wireless networking [1]. Sensor nodes are deployed at various positions in the phenomenon to be sensed. These sensor nodes measure the specified physical parameters of the phenomenon such as air temperature, humidity level or CO2 level, etc. The sensed data is sent from the source node to a centralized sink. The sink then processes the node data and sends it to the cloud servers for distant user access [2]. Wireless Sensor Networks are used for variety of applications such as environmental monitoring [3], vehicular tracking [4], forest fire control [5] and precision agriculture [6], etc.
WSN nodes are generally equipped with limited power resources that do not last long [7, 8]. Although the nodes are usually rechargeable, they are difficult to recharge in bulk. Hence, maximizing the lifetime of the sensor nodes is a critical design objective of a WSN [1]. A WSN node spends a major portion of its residual energy on data transmission [9, 10]. In the case of single-hop transmission, the boundary nodes consume more energy on data transmission as compared to the nodes near the sink. This is because the transmission energy consumption of a node depends on the transmission distance [11]. Multihop transmission helps reduce the energy consumption of boundary nodes as it utilizes intermediate relay nodes (RN). The RN collects the data from the boundary nodes and retransmits it to the sink [2]. In the case of hierarchical clustering-based transmission, the nodes are grouped into multiple clusters. Every cluster of nodes designates a suitable cluster member node as the cluster head (CH). The CH in a cluster gathers the packets from other cluster nodes. The CH further aggregates the collected packets into a single datum and transmits the datum to the sink. Clustering is an energy-efficient data transmission approach as it uses data aggregation. [12, 13].
The Low Energy Adaptive Clustering Hierarchy (LEACH) protocol of Wendi et al. [3] implements a clustering-based data transmission scheme. LEACH adopts Probabilistic Weight Function (PWF)-based approach for CH selection. The stable Election Protocol (SEP) of Georgios et al. [8] is another clustering-based protocol that elects CH nodes based on node residual energy and offers even load distribution among network nodes. Moussa et al. in [2] presented the hybrid Multihop-Clustering-based Energy-aware Cluster-based Routing Protocol (ECRP). In ECRP, the CH nodes collect the data packets from other nodes of their clusters. Then, the CH nodes communicate their packets to sink in a Multihop manner.
Wang et al. in [14] presented the “Routing Algorithm with Mobile Sink Support (RAMSS)” scheme. RAMSS combines the clustering approach with the sink mobility technique. Here, the sink is rotated in the sensed region on a predefined trajectory. The sink stops after every fixed time interval and gathers the packets from the surrounding source nodes. The mobile sink significantly decreases node energy expenditure during data communication by reducing the mean distance between the nodes and the sink. However, the concept of mobile sink is not feasible for complex environments such as the dense forest or hilly terrain where the obstacles inhibit mobile sink to complete data collection tasks [15].
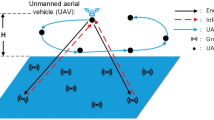
The recent research works in the WSN field, suggest UAV-assisted data collection in wireless sensor networks [16]. In a UAV-based wireless sensor network (UAV-WSN), the sensor nodes are installed at the ground and a UAV works as the sink node. The UAV-based sink moves on a predefined flight trajectory in the air and receives the data packets of surrounding sensor nodes. The rotary wing drones are suitable for UAV-WSN applications as they can hover over a specific region and its flight control operation is much easier. The UAV-based WSN systems are widely used for various data sensing applications such as remote sensing [17,18,19], precision agriculture [6], etc. Figure 1 shows a pictorial representation of a UAV-WSN. As compared to the ground-based mobile sink, the UAV sink avoids the ground obstacles and establishes line-of-sight communication with the ground sensor nodes. Hence, the application of UAV-based sink enhances the network coverage and data collection efficiency, significantly [17]. Along with many advantages, the UAV-WSNs also have some drawbacks. For example, the high maneuverability of UAV-based sink and the variations in flight altitude may result in undesired changes in the network topology [20]. The fluctuations in network topology cause connectivity problems and affect the network’s throughput performance. Hence, developing a low power and high throughput data routing scheme for UAV-WSN is a tedious task.

A UAV assisted wireless sensor network
The state-of-the-art UAV-WSN protocols implement the various type of data routing schemes such as Single-hop [21,22,23], Multi-hop [24], Hierarchical clustering-based routing [25,26,27,28], or Hierarchical Tree-based routing [29, 30], etc. Further, an effective UAV-WSN protocol also considers the UAV’s flight trajectory optimization mechanism.
UAV flight trajectory optimization is a multi-objective optimization problem (MOOP). Solving a UAV's flight trajectory optimization problem requires implementing a global search metaheuristic such as Artificial Bee Colony (ABC) Algorithm [31], Genetic Algorithm (GA) [21, 32], Dynamic Programming based on Traveling Salesman Problem [22, 33], or NSGA-II Algorithm [34], etc. A global search metaheuristic is a computational procedure that improves its candidate solutions in terms of the target objective functions in iterations and gives the optimal solution to an optimization problem. The optimization may or may not be a subject of inequality and/or equality constraints [35].
Poudel et al. presented Hybrid Path Planning (HPP) protocol for UAV-WSN [31]. HPP implements Probabilistic Road-map and Artificial Bee Colony (ABC) algorithm for UAV’s flight trajectory optimization. The optimized UAV flight trajectory achieves concurrent optimization of multiple objective functions such as minimized UAV flight time, minimized node energy consumption, and minimized flight path length. Further, the HPP incorporates a hierarchical clustering-based data routing scheme for ground node data transmissions. Similar to HPP, H-UAV-WSN [36], HHA [23], GA-UAV [21], DP-TSP [22], and EFDC [32] are state-of-the-art UAV-WSN protocols that implement an effective UAV’s trajectory optimization mechanism.
Section 2 presents a detailed survey of important UAV-WSN protocols. Following observations are made based on the survey presented:
-
(a)
Minimized ground node energy consumption in data transmission and the minimized UAV energy consumption during flight operation are the critical design objectives for an energy-efficient UAV-WSN system [15, 23, 31, and 36].
-
(b)
Maximized Received Signal Strength (RSSI) at the UAV sink provides a tremendous improvement in data collection efficiency and network throughput rate [25, 27, and 28].
-
(c)
In addition, it is also observed that none of the existing UAV trajectory optimization schemes perform concurrent minimization of UAV energy consumption and ground node energy consumption objectives along with the maximization of RSSI objective by applying the NSGA-II optimization heuristic. NSGA-II is a non-dominated sorting-based fast and elitist Multi-Objective Evolutionary Algorithm (MOEA). NSGA-II converges to the Pareto-optimal solutions for a MOOP within a shorter operating period. Furthermore, NSGA-II offers lesser O (MN2) computational complexity as compared to the O (MN3) complexity of other non-dominated sorting-based MOEAs [37]. However, Gupta et al. in [34] have used the NSGA-II algorithm for trajectory optimization but they considered sensing Quality, data collection delay, and UAV flight distance objectives.
In this paper, we present a hybrid data routing protocol for UAV-WSN that considers the optimized planning of the UAV’s flight trajectory in parallel with energy-efficient data communication amid ground sensor nodes and the UAV. The presented protocol utilizes multi-objective optimization heuristics NSGA-II [37] to optimize the UAV’s flight trajectory. The objectives of trajectory optimization are (a) to minimize UAV energy consumption in-flight operation, (b) to minimize node energy consumption in data transmission, and (c) to maximize received signal strength (RSSI) at the UAV.
As per the presented protocol, the ground nodes (GN) are divided into the multiple number of clusters and a UAV-based sink follows an optimized air route (flight trajectory). In order to gather the packets from the ground nodes, the UAV-based sink stops at a specific location above the first cluster and starts hovering over there. Now it establishes line-of-sight communication with the ground nodes of first cluster and receives their data packets on TDMA basis. After receiving the packets, the UAV starts following its flight trajectory until it reaches the next data collection point over the second cluster. In this manner, the UAV sink covers all the nodes of the network and returns to the starting point. The point where the UAV hovers over a cluster and collects the data packets from its nodes is termed as the “UAV Hover Point (UHP)” of that cluster.
The incorporated NSGA-II-based optimization mechanism decides the optimized coordinates of the UAV Hover Points for each cluster of the network. These optimized UAV hover points together form an optimized flight trajectory for the UAV sink. In its first run, the NSGA-II algorithm decides the optimized UHP of the first cluster. The chromosomes in the initial NSGA-II population carry three genes through which they indicate the 3D coordinates of the tentative UHP points over the first cluster. A multi-objective fitness evaluation operator estimates the chromosome fitness in terms of the following parameters: (i) the energy consumed by the UAV in flying from the UAV’s starting point to the UHP indicated by the chromosome, (ii) the energy consumed by the nodes of the first cluster in data transmission to the UAV hovering at the UHP indicated by the chromosome and (iii) the average signal strength (RSSI), the UAV receives from the nodes of the first cluster while hovering at the UHP indicated by the chromosome. Further, the NSGA-II algorithm iterates through the remaining NSGA-II steps, which include non-dominated sorting, selection, crossover, mutation, and elitism. The presented NSGA-II-based model develops into a non-dominated set of Pareto-optimal UHP coordinates for the first cluster. The rendered UHP coordinates meet the desired objectives of minimized UAV energy consumption, minimized node energy consumption in data transmission, and maximized RSSI. The maximized resultant RSSI brings about a significant increase in network throughput rate. Similarly, in its second and the further runs, the NSGA-II algorithm decides the optimized UHPs for other clusters of the network.
The presented protocol is simulated using the relevant models such as Hasini’s UAV energy consumption model [38], First-order node energy consumption model [3, 39], and the Log-distance path loss model [11]. MATLAB scripts along with the optimization toolbox (Version R2018a) are used for protocol simulation. Results are obtained in terms of network lifetime performance, network throughput performance, and network latency performance. A quantitative comparison with other relevant protocols proves that the proposed UAV-WSN routing scheme provides an elongated network lifetime and better QoS performance.
According to our extensive review process, it is for the first time that the fast and elitist NSGA-II MOEA is being proposed for UAV’s trajectory optimization in order to achieve following objectives: (i) “Minimized ground node energy consumption” (ii) “Minimized UAV energy consumption,” and (iii) “Maximized received signal strength (RSSI) at the UAV” The major contributions of the presented work are as follows:
-
(a)
Proposed a tri-variable chromosome pattern for initial NSGA-II population. Each chromosome in the NSGA-II population represents the 3D coordinates of a random UHP location.
-
(b)
Proposed a multi-objective fitness estimation function that evaluates the NSGA-II chromosome fitness in terms of following objectives: (i) UAV’s energy consumption in flight operation, (ii) node energy consumed in data transmission and (iii) average signal strength (RSSI), the UAV receives from the ground nodes.
-
(c)
The proposed optimization framework results into the Pareto-optimal UAV trajectories which optimizes the target objectives.
-
(d)
The developed UAV-WSN protocol is scalable and suitable for the low-maintenance situations such as precision agriculture.
The present article is further organized into the following sections: Sect. 2 presents the survey of related works along with a brief introduction to the NSGA-II algorithm. Section 3 highlights various models and assumptions used for protocol implementation and experimental purposes. Section 4 elaborates on the proposed NSGA-II-based UAV-WSN protocol. Section 5 discusses the protocol performance. Section 6 highlights the concluding remarks and presents suggestions for future work.
2 Literature review
This section presents a brief survey of state-of-the-art UAV-WSN protocols. The section ends with a brief introduction to multi-objective NSGA-II optimization algorithm.
2.1 Related works
Several types of data routing protocols have been reported for UAV-WSNs in the existing literature. These protocols implement diverse types of data routing schemes such as Single-hop [21,22,23], Multi-hop [24], Hierarchical clustering-based routing [25,26,27,28], and Hierarchical Tree-based routing [29, 30, and 36], etc. Further, the surveyed protocols either utilize predefined UAV flight trajectories or incorporate dedicated UAV flight trajectory optimization mechanisms to achieve distinct performance objectives such as minimized UAV flight time [31], minimized time delivery constraint [23], Minimized ground node energy consumption [23, 24] or minimized flight trajectory length [33], etc.
Jawhar et al. [24] presented the UAV-based Liner Sensor Network (ULSN) protocol. ULSN is applicable for the Linear Sensor Networks (LSN) that implement ground source nodes (SN) along with the ground relay nodes (RN). SNs communicate their data packets to the nearest RN in a Multihop manner. The relay node after doing data aggregation transmits the collected data to a UAV-based sink which flies back and forth along the LSN. ULSN improves the network’s packet delivery ratio significantly. However, ULSN does not incorporate any trajectory optimization mechanism for the UAV sink. The UAV sink follows predefined movement trajectories.
ULSN implements the multi-hop-based routing scheme that results in the elongated network latency, whereas the hierarchical clustering-based data routing schemes provide energy-efficient data routing along with acceptable latency and good throughput rates. Following UAV-WSN protocols incorporate hierarchical clustering-based data routing schemes:
Dios et al. in [25] presented the Cooperation-based UAV-WSN (C-UAV-WSN) protocol. C-UAV-WSN is a hierarchical clustering-based data routing protocol that implements a cooperative UAV-WSN approach. As per the cooperative UAV-WSN approach, the altitude of the UAV flight trajectory is kept within the transmission ranges of CH nodes. This improves the network connectivity between ground sensor nodes and the UAV, significantly. However, due to ground obstacles and the noisy channels, some of the short-range ground nodes remain uncovered and present coverage-hole problems.
To eliminate the coverage-hole problem of UAV-WSN, Okcu et al. [27] proposed the RSSI-based Hybrid and Energy-Efficient Distributed (RHEED) protocol. RHEED is a clustering-based protocol. It selects those ground nodes as CH which receive excellent “Received Signal Strength (RSSI)” from the UAV. Other short-range ground nodes act as child cluster nodes. Similar to RHEED, the UAV-assisted Routing Protocol (URP) of Uddin et al. [28] selects the CH nodes that are installed nearby to the UAV trajectory. Such nodes possess better RSSI connectivity to the UAV data collection points. The Bayesian classifier mechanism is used for CH selection. URP and RHEED provide improved data collection efficiency and network throughput rate due to better RSSI connectivity amid CH nodes and the UAV sink. However, due to the use of a single UAV, large and sparse networks may still show the coverage-hole problem.
The Aerial-based Data Collection (ADC) protocol of Caillouet et al. [29] is suitable for monitoring the large and sparse networks as it utilizes a fleet of UAVs for collecting the ground sensor data. ADC is a hierarchical tree-based UAV-WSN protocol. ADC incorporates a heuristic pricing scheme that minimizes the data collection cost by solving the three-dimensional ground node positions in terms of UAV mobility and connectivity variations. The UAV-aided Compressive Data Gathering (UAV-CDG) of Ebrahimi et al. [30] is another tree-based UAV-WSN protocol that creates a forwarding tree of cluster-based data transmission scheme so that the overall network energy consumption in data transmission and overall UAV flight time gets minimized. The ADC and UAV-CDG schemes are suitable for large and sparse networks.
Zanjie et al. [26] proposed an optimal Dynamic Programming-based Algorithm (DPA) that efficiently allocates the available channel bandwidth for data transmission and the limited energy resources for data sensing and transmission. Simultaneously, allocation of bandwidth and energy resources maximizes the data transmission rates. Further, the DPA implements a dual-layer clustering-based data routing scheme.
Singh et al. in [40] presented the Proficient Data Gathering (PDG) technique for UAV-WSNs. The PDG incorporates the hierarchical clustering-based data routing scheme in a multi-UAV WSN system. Here, the CH nodes are selected based on the weighted probability function (WPF) approach. The ground nodes are rated for CH selection by estimating a WPF index that is a function of the node’s residual energy, node’s distance from the sink, and average network energy. The ground node achieving above threshold WPF becomes the CHs. Non-CH nodes make links with the nearest CH node. Simulation results reflect that the PDG offers a significant improvement in network lifetime.
Hierarchical clustering-based UAV Routing Protocol (HC-URP) of Udin et al. [41] implements clustering-based data routing scheme in UAV-WSN. The UAV in HC-URP follows the predefined flight trajectory. However, the flying UAV can deviate from its predefined path up to a certain extent as per location of the cluster heads.
The UAV-WSN protocols discussed so far do not incorporate any dedicated UAV’s flight trajectory optimization technique [24,25,26,27,28,29,30, 40, 41]. Due to non-optimized random UAV paths, some of the ground nodes that face the noisy channel or have a short transmission range are unable to link with the UAV-sink and remain uncovered [25, 27, and 28].
In general, a global search metaheuristic such as Artificial Bee Colony Algorithms [31], Genetic Algorithm (GA) [21, 32], Tabu search algorithm [32], Dynamic Programming based on Traveling Salesman Problem [22, 33], or NSGA-II Algorithm [34] are implemented to solve the UAV’s flight trajectory optimization problem.
An optimization problem can be categorized as a linear or nonlinear optimization problem. The linear optimization is the one in which the objective function is a linear function of the decision variables, whereas the nonlinear optimization or nonlinear programming (NLP) is the one in which any of the inequality/equality constraints or the objective function is a nonlinear function of the decision variables [37]. Further, an optimization problem can be categorized as a single or multi-objective optimization problem. A Multi-Objective Optimization problem (MOOP) involves simultaneous maximization and/or minimization of multiple objectives [42].
The problem of UAV’s flight path optimization needs to achieve multiple target objectives simultaneously which may be as follows: (a) To minimize the overall UAV flight time and distance [31, 33, and 34], (b) To minimize UAV energy consumption and Node energy consumption [23, 31, and 36], (c) To minimize Packet delivery time [23], (d) To maximize node coverage and data collection efficiency [23, 24, and 28], (e) To minimize node’s Age of Information (AoI) and Network’s average AoI [21, 22], and (f) To minimize the mean distance amid ground nodes and the UAV [36], etc. Hence, an UAV’s flight path optimization is a Multi-Objective nonlinear optimization problem [22]. Following UAV-WSN-based research works incorporate the dedicated multi-objective nonlinear UAV’s flight path optimization mechanisms.
The Projection-based comprehensive data gathering (PCDG) protocol of Ebrahimi et al. [33] is a hybrid protocol that considers the optimized planning of UAV flight trajectory besides data collection from ground sensor nodes. The PCDG performs the following operations in one cycle: (a) dividing the ground nodes into multiple node clusters, (b) deciding the hierarchy of different nodes for data forwarding, (c) performing the CH selection, and (d) Optimizing the trajectory of UAV through Traveling Salesman Problem (TSP)-based heuristic algorithm. The objectives of trajectory optimization are to minimize the total number of transmissions and UAV travel distance.
The Hybrid UAV-aided WSN routing (H-UAV-WSN) protocol of Popsecu et al. [36] also considers the optimization of UAV's trajectory besides high throughput data communication amid ground sensors and UAV sink. The objectives of trajectory optimization are to minimize node energy consumption along with the mean distance between the CH nodes and the UAV.
Mazayev et al. in [23] presented a Hybrid Heuristic Algorithm (HHA)-based trajectory optimization framework for UAV sinks. HHA optimizes the trajectories of multi-UAV sinks so that the objective of UAV-based node packet collection is performed under the desired delivery time constraints. HHA protocol adopts the flat data routing scheme where ground nodes sense and communicate their data packets to flying UAV-sink, directly. Direct data transmission may lead to excessive node energy consumption in data transmission.
The Genetic Algorithm (GA)-based UAV path optimization mechanism (GA-UAV) has been proposed by Liu et al. in [21]. The GA-UAV protocol provides the optimized UAV trajectory through which the UAV-sink collects the ground node data packets with minimized Age of Information (AoI). The AoI parameter reflects the sum of ground node data uploading time and the UAV flight time. The GA-UAV is beneficial for emergency and real-time data monitoring applications. However, to prove the efficiency of the proposed technique, its network lifetime and throughput performance also need to be measured. Similar to the GA-UAV, Mao et al. [22] also attempted to minimize the ground node’s AoI value in a multi-UAV-based densely populated WSN system. In this study, the shortest Hamiltonian AoI optimal UAV trajectories are determined through the dynamic programming based on Traveling Salesman Problem (DP-TSP).
Nazib et al. in [32] considered the WSNs located in Hilly trains and presented the UAV sink-based Energy-Efficient and Fast Data Collection (EFDC) scheme. EFDC implements 2 tier clustering-based data routing scheme along with the hybrid GA and Tabu search algorithm to determine optimal UAV data collection points. EFDC offers significant improvements in network lifetime, delay, and load balancing metrics. However, simulation scenarios do not consider dynamic environmental conditions.
Gupta et al. in [34] presented the Optimal Path Planning for UAV (OPP) protocol. OPP utilizes non-dominated sorting-based fast and elitist NSGA-II optimization heuristic for trajectory optimization. The objectives of trajectory optimization are to maximize Sensing Quality along with the minimization of UAV data collection delay and UAV flight distance.
We presented a brief survey of state-of-the-art UAV-WSN protocols. Table 1 depicts the details of the different UAV-WSN protocols, surveyed. Based on the presented survey, it is observed that an effective UAV-WSN protocol not only considers the data routing scheme but also the optimization of UAV’s flight trajectory. Further, the “Minimization of ground node energy consumption” along with the “Minimization of UAV energy consumption” are the critical design objectives for elongating UAV-WSN lifetime [1, 23, 31, and 36], whereas the “Maximization of RSSI at the UAV” leads to a tremendous improvement in network throughput rate [27, 28].
2.2 NSGA-II algorithm
NSGA-II is an MOEA that finds the Pareto-optimal solutions for the linear or nonlinear multi-objective optimization problems (MOOP) [35, 37]. Solving a MOOP needs simultaneous optimization of two or more objective functions \(f_{k} \left( x \right);k = 1, 2,..I\) under the given inequality \(g_{a} \left( x \right) > 0;a = 1, 2,..A\) and/or equality constraints\(h_{b} \left( x \right) = 0;b = 1, 2,..B\). The NSGA-II works as follows:
2.3 Step-1: Population initialization
First of all, NSGA-II creates an initial population of chromosomes\(P = (x_{1} ;x_{2} ; \ldots x_{N}\)\()\). Here \(x_{i} ;i = 1, 2,.. N\) are the population chromosomes and \(N\) is the population size. Every chromosome \(x_{i}\) in the NSGA-II population is a set of gene variables, i.e.,\(x_{i} = \left( {g_{i1} ;g_{i2} ; \ldots g_{iM} } \right)\). Here \(g_{ij} ;j = 1, 2..M\) are the genes of chromosome \({x}_{i}\) and M is the number of variables. Through its gene variables, a chromosome presents a random solution to the target MOOP. NSGA-II creates its initial population as follows:

Note: Here rand is a single uniformly distributed random number in between (0, 1). The LBj & UBj are the application-dependent lower and upper bounds for gene \(g_{ij} ;j = 1, 2..M\).
2.4 Step-2: Non-domination sorting-based fitness evaluation
After creating the initial population, NSGA-II calculates the values of objective functions \(f_{k} \left( {x_{i} } \right);k = 1, 2,..I\) for every chromosome \(x_{i} ; i = 1, 2,.. N\) of initial population. Subsequently, NSGA-II identifies the non-dominated set of chromosomes from the initial population by applying the non-domination-based sorting algorithm as follows:

The chromosomes which remain unmarked are the non-dominated Pareto-optimal solutions that represent the first non-dominated front \({F}_{1}\).
Further, the NSGA-II algorithm runs the @distancecrowding function that estimates crowding distance values of every Pareto-optimal solution on front F1. A solution's crowding distance is the average distance between its two nearby solutions. The boundary solutions with minimum and maximum objective function values are assigned infinite crowding distances, ensuring that they are always chosen. Crowding distance is calculated as follows:

Note: Suppose there are xi; i = 1… NF1 Pareto-optimal solutions in front F1 and a particular solution xi gives the values of multiple objectives as\(f_{k} \left( {x_{i} } \right);k = 1, 2,..I\). Now, F1 (i) fk denotes the value of fk (xi) objective of ith solution in front F1.
After identifying the Pareto-optimal chromosomes of the first non-dominated front F1, the NSGA-II omits these chromosomes from the current population. Then, the remaining population is again processed for non-dominated sorting and the second non-dominated front F2 is obtained. In this manner, the whole NSGA-II population is divided into various non-dominated fronts.
2.5 Step-3: Tournament selection
In this step, NSGA-II creates a mating pool of parent chromosomes. To fill up the pool, the NSGA-II arbitrarily picks up two chromosomes from the current population. The chromosome of the lower front is selected as the parent chromosome as it dominates a larger set of chromosomes in terms of target objectives. If the front of two chromosomes is common then the chromosome of larger crowding distance is selected as the parent chromosome. A predefined Crossover rate variable ρc decides the number of parent chromosomes to be selected.
2.6 Step-4: Crossover
In this step, NSGA-II arbitrarily picks any two parent chromosomes from the mating pool and produces an offspring chromosome through their crossover. During the crossover, a crossover point is randomly decided. The genes of the offspring chromosome before the crossover point come from the first parent and the remaining genes come from the second parent.
The predefined Crossover rate variable ρc decides the number of crossovers to be performed during an NSGA-II iteration.
An offspring population is created by replacing the first parent chromosome in current population by its newly generated offspring chromosome. Figure 2 demonstrates the crossover step.

Crossover step
2.7 Step-5: Mutation
In the Mutation step, NSGA-II selects a random gene from a random chromosome of the offspring population and locally perturbs it with a random value under the related gene bounds. A predefined mutation rate variable ρm determines how many mutations to perform in an NSGA-II iteration. Figure 3 demonstrates the mutation step.

Mutation step
2.8 Step-6: Elitism
In the elitism step, the current and the offspring populations are merged and the combined population is divided into various non-dominate fronts: F1, F2 & so on. Now, the NSGA-II starts from the F1 front of the combined population and copies the top N number of solutions into a new population.
In this way, a cycle of the NSGA-II algorithm is completed. Further, NSGA-II iterates through the steps-2 to 6 till a predefined stopping condition is not met. In the end, the final NSGA-II population is again sorted to obtain the front F1. The chromosome of finally obtained front F1 is the final Pareto-optimal solutions for the target multi-objective optimization problem. Figure 4 depicts the NSGA-II flowchart.

NSGA-II flowchart
3 Models and assumptions
This section presents the details of various models and assumptions used for protocol implementation and experimental purposes.
3.1 UAV energy consumption model
This work considers the empirical model proposed by Hasini et al. [38], for estimating the UAV energy consumption under different flight scenarios. Hasini’s model is based on the experimental studies carried out using Intel’s Aero-drone [43] with 4000 mAh ECO-S LiPo batteries [44].
As per the model, Eq. 1 gives the energy consumption of the UAV for the “Vertically upward movement” scenario.
The parameter Dup in Eq. 1 is the vertical distance covered by the UAV while moving vertically upward with the vertical movement speed of 1 m/sec.
Equation. 2 gives the energy consumption of the UAV for the “Vertically downward movement” scenario.
The parameter Ddown in Eq. 2 is the vertical distance covered by the UAV while moving vertically downward with the vertical movement speed of 1 m/sec.
Equation. 3 gives the energy consumption of the UAV for the “Horizontal movement” scenario.
The parameter Thori in Eq. 3 is the time (in sec) of the UAV’s horizontal movement while the horizontal movement speed is 1 m/sec.
3.2 Node transmission energy consumption model
This work considers the “First-Order Node Energy Consumption Model” to estimate the amount of energy that is expended by a node during data communication [39, 45].
As per the model, Eq. 4 estimates the energy expended by a node in transmitting its data packet to another node.
The parameters k, d and \(E_{{{\text{elec}}}}\) in Eq. 4 are data packet bit count, transmission distance (m), and the transceiver energy consumption (J per bit), respectively. The parameters \(\varepsilon_{{{\text{fs}}}}\) and \(\varepsilon_{{{\text{mp}}}}\) are the amplifier coefficients of free space and multipath communication, respectively. The parameter \(d_{{\text{o}}}\) is the threshold distance that is calculated as \( d_{0} = \sqrt {\varepsilon_{fs} /\varepsilon_{mp} }\).
Equation 5 gives the energy expended by the receiver node in receiving k-bit data packet.
Equation 6 gives the energy expended by the aggregating node for k-bit data aggregation.
The parameter \({E}_{\mathrm{DA}}\) in Eq. 6 is per bit data aggregation energy consumption.
3.3 Path loss model
This work considers the Log-distance path loss model, as given by Eq. 7. This model estimates the path loss faced by a signal in 2.4 GHz narrow ISM band communication [11].
The parameter PL in Eq. 7 denotes the path loss (in dB), f denotes the transmission frequency (in MHz), D denotes the distance between transmitting and receiving nodes (in m), Do denotes the reference distance (in m) and η denotes the path loss index. The parameter Gσ is a Gaussian arbitrary variable of zero mean and σ standard deviation.
3.4 UAV-WSN topology
This work considers a UAV-WSN of 128 nodes and a single UAV-based sink for implementation and simulation of the proposed protocol. Nodes are installed on ground in a 100 X 100 m2 network area.
The considered UAV-WSN topology creates optimum number of node clusters. If the total number of nodes in the network is n and the node density is ρ, then the required number of optimal clusters is given by Eq. 8.
where the variable \(d_{{{\text{max}}}}\) denotes the transmission range of the ground nodes. In the present work, n is 128, the network area is 10000 m2 and \(d_{{{\text{max}}}}\) is 40 m. Then, ρ becomes 128/ (100 × 100), i.e., 0.0128 per m2. Hence, the optimal number of clusters becomes \(p_{{{\text{opt}}}}\)≈16. Thus, the considered UAV-WSN topology creates 16 node clusters. The shape of every cluster is taken as rectangular with a 25 m dimension size. Every cluster comprises 8 ground nodes.
The UAV sink follows an air route (flight trajectory) that is optimized by the proposed NSGA-II-based protocol. Figure 5 shows the ground nodes along with an arbitrary flight trajectory for the UAV sink of the target UAV-WSN.

Target UAV-WSN
For collecting the data packets from the ground sensor nodes, the UAV stops at a specific location above the first cluster and starts hovering over there. Now, the hovering UAV establishes line-of-sight communication with the nodes of the first cluster and receives their data packets on a TDMA basis.
After receiving the packets, the UAV starts following its flight trajectory until it reaches the next data collection point over the second cluster. In this manner, the UAV sink covers all the nodes of the network. The location from where the hovering UAV collects the data packets of the nodes of a cluster is called the “UAV Hover Point (UHP)” of that cluster.
4 Proposed UAV-WSN protocol
This section presents the design steps of the proposed NSGA-II-based UAV-WSN protocol that considers the optimized planning of the UAV’s flight trajectory along with the clustering-based data routing. The presented protocol works in the following phases:
4.1 UAV’s flight trajectory optimization phase
During its trajectory optimization phase, the presented protocol generates the optimized UHP coordinates for each cluster to achieve the following objectives: i) Minimized UAV energy consumption, (ii) Minimized node energy consumption in data transmission, and (iii) Maximized packet success rate (network throughput). The trajectory optimization phase operates in the following steps:
4.2 Step 1: Population initialization
In its first run, NSGA-II-based protocol finds the optimized UHP location for the first cluster of nodes. The proposed form of the NSGA-II algorithm creates an initial population of chromosomes \(P = \left( {x_{1},x_{2}, \ldots x_{n} } \right)\) where \(n\) is the population size. Every chromosome \(x_{i} ;i = 1,2,..n\) of the NSGA-II population consists of three genes \(\left( {G_{i1}, G_{i2} \& G_{i3} } \right)\) through which it indicates the random 3D coordinates of a tentative UHP location over the first cluster. The three genes \(\left( {G_{i1}, G_{i2} \& G_{i3} } \right)\) of a chromosome \(x_{i}\) are initialized randomly within the upper and lower bounds that fulfill the physical dimensions of the first cluster of nodes, i.e., \(0 \le G_{i1} < 25,0 \le G_{i2} < 25,\) and \(G_{i3} = U_{h}\). Here, \(U_{h}\) is a predefined parameter that indicates the altitude (in meter) at which the UAV will fly over the cluster. Figure 6 shows the initial NSGA-II population.

Initial NSGA-II population
4.3 Step 2: Multi-objective fitness evaluation
After initializing its population, the NSGA-II algorithm estimates the fitness of each chromosome-xi; i = 1, 2…n of the initial population in terms of following three objective functions:
(i) UAV energy consumption (Objective-1): The three genes of the chromosome \(x_{i}\), i.e., \(\left( {G_{i1}, G_{i2} \& G_{i3} = U_{h} } \right)\) give the 3D coordinates of a tentative UHP location. To reach to the UHP point \(\left( {G_{i1}, G_{i2}, U_{h} } \right)\), the UAV first flies vertically upward from the starting point \(\left( {0, 0, 0} \right)\) to the point \(\left( {0, 0, U_{h} } \right)\). Then, it flies horizontally from the point \(\left( {0, 0, U_{h} } \right)\) to the UHP location \(\left( {G_{i1}, G_{i2}, U_{h} } \right)\). Figure 7 shows the UAV’s flight trajectory amid starting point to the UHP location.

UAV’s flight trajectory to the UHP of chromosome-xi
The first objective function is the amount of energy expended by the UAV in flying from the starting point to the UHP location as indicated by the chromosome-xi.
Suppose, EUAV_i denotes the UAV’s energy consumption. The speed of the UAV’s flight \(V_{h}\) is taken as 1 m/sec. Now, using Hasini’s UAV model (Eqs.1, 2 and 3), EUAV_i is estimated by Eq. 9.
Note: NSGA-II attempts to minimize the EUAV objective.
(ii) Node energy consumption (Objective-2): Now, the hovering UAV establishes line-of-sight communication with the nodes of the first cluster and receives their data packets on a TDMA basis using IEEE 802.11 MAC protocol. The second objective function is the overall residual energy that is consumed by the nodes of the first cluster in transmitting their data packets to the UAV sink hovering at the UHP location \(\left( {G_{i1}, G_{i2}, U_{h} } \right)\) of chromosome-xi.
Suppose ENode_i denotes the overall node energy consumption in data transmission. Now using the First-Order Node Energy Consumption Model (Eqs. 4, 5 and 6), ENode_i is estimated by Eq. 10.
The parameter U in Eq. 10 represents the set of the cluster-1 nodes. The parameter \(d_{j - \sin k}\) is the Euclidean distance between node-j \(;\forall j \in U\) and the UAV sink. If \(\left( {X_{j},Y_{j}, 0} \right)\) are the coordinates of node-j, then \(d_{j - \sin k}\) is given by Eq. 11.
Note: NSGA-II attempts to minimize the ENode objective.
(iii) Received signal strength at UAV (Objective-3): The last objective of the proposed UAV’s path optimization process is to maximize the packet success rate (network throughput). The probability of successful packet delivery is positively correlated to the signal strength (RSSI) received by the sink from the transmitting node. Hence, the enhancement in RSSI provides a remarkable enhancement in network throughput. Hence, the third objective is the average signal strength, the UAV receives from the nodes of the first cluster while hovering at the UHP location indicated by the chromosome-xi.
Suppose, RSSIi denotes the average signal strength, the UAV sink receives from the nodes of the first cluster. Now, using the path loss model (Eq. 7), RSSIi is estimated by Eq. 12.
The parameter Pt in Eq. 12 is the signal transmit power (in dBm) of nodes. Parameter m is the number of nodes in a cluster.
Note: NSGA-II attempts to maximize the RSSI objective.
4.4 Step 3: NSGA-II iterative operations
After multi-objective fitness evaluation, the NSGA-II-based UAV-WSN protocol carries out the iterative NSGA-II steps like non-dominated sorting, selection, crossover, mutation, and elitism. These steps have been elaborated in sub-Sect. 2.2. NSGA-II stops its iterations when the predefined termination criteria get fulfilled.
4.5 Step 4: Applying proposed protocol to the target UAV-WSN
The proposed NSGA-II-based UAV-WSN protocol has been applied to cluster-1 of the UAV-WSN system in Figure 5. Table 2 depicts the values of different NSGA-II parameters.
Figure 8 a, b & c depicts the three-dimensional objective space for the initial population, the 50th population, and the finally achieved Pareto population, respectively. Figure 9 depicts the chromosomes of the finally achieved Pareto optimal population.

Objective space a Initial generation b 50th generation population c Final pareto generation

Final pareto generation population chromosomes
The final Pareto population consists 36 chromosomes which give different Pareto-optimal UHP locations for cluster-1. Table 3 shows the Pareto population chromosomes and their respective objective values. Giving the highest priority to the node energy consumption and RSSI objectives, we chose the chromosome-x1, i.e., (16.79, 13.54, and 1) as the final Pareto optimal UHP location for cluster-1. The chosen Pareto-optimal UHP location provides the lower value of node energy consumption objective along with the highest value of the Average RSSI objective.
After finding the optimized UHP location for cluster-1, the proposed UAV trajectory optimization scheme finds the UHP location for cluster-2. For this, the UHP location of cluster-1, i.e., (16.79, 13.54, and 1) is taken as the starting point of the UAV. Now, the NSGA-II algorithm (step 1 to step 3) executes again to find the optimized UHP location for cluster-2. Similarly, in its third and further runs, the NSGA-II-based UAV-WSN protocol finds the optimized UHP locations for the remaining clusters of UAV-WSN. These optimized UHP locations create an optimized flight trajectory for the UAV sink.
Figure 10 shows the optimized flight trajectory for the UAV sink as generated by the proposed NSGA-II-based UAV-WSN protocol. This optimized flight trajectory attains the goals of minimum node energy consumption in data transmission, minimum UAV energy consumption in data collection, and the maximum RSSI. Enhancement in RSSI provides a remarkable enhancement in network throughput.

Optimized flight trajectory generated by the proposed NSGA-II based UAV-WSN protocol
4.6 UAV-based data routing phase
After trajectory optimization, the ground sensor nodes sense the specified parameters of the ambient environment and save the sensed information in form of a data packet.
After data sensing, the UAV sink follows the optimized flight trajectory and stops at the UHP location over the first cluster of nodes, and starts hovering over there. The hovering UAV establishes line-of-sight communication with the ground nodes of the first cluster. Further, the UAV-based sink transmits a TDMA duty cycle schedule for node data transmissions of cluster-1. Figure 11 shows the TDMA schedule.

TDMA MAC slots
As per the implemented TDMA schedule, a 1 ms time slot is allotted to each cluster member node, out of which 0.2 ms subslot is used for control message communication and 0.8 ms subslot is used for data communication. There is a 0.25 ms guard slot between every two consecutive node slots. The ground nodes operate and transmit their packets in the allotted slots only. Else, they stay in hibernation mode. Now, the clustering-based data communication takes as follows:
-
(i)
The highest residual energy node of a cluster with a minimum distance to the cluster’s UHP location acts as the cluster head node.
-
(ii)
The ground sensor nodes transmit their data packets one by one based on the TDMA schedule provided by the UAV sink.
-
(iii)
A ground sensor node transmits its data packet either to the UAV-based sink directly or the ground cluster head node, whichever is nearer.
-
(iv)
After all the alive nodes of the first cluster have transmitted their packets, the ground cluster head node aggregates the packets it received and creates a combined datum packet. Data aggregation compresses the amount of data to be sent. Hence, the clustering-based data communication is an energy-efficient data transmission approach. [12, 13].
-
(v)
The ground cluster head node transmits the aggregated datum to the UAV sink in the end.
After receiving the packets of the nodes of the first cluster, the UAV sink starts following its flight trajectory until it reaches the next optimized UHP location of the second cluster. In this manner, the UAV sink covers all the nodes of the network and returns to the starting point.
4.7 Computational complexity of the proposed algorithm
The computational complexity of an algorithm is determined based on arithmetical and logical operations, the algorithm carries out for its execution. The proposed UAV’s trajectory optimization scheme is based on the NSGA-II Multi-objective Evolutionary Algorithm. The computational complexities of various operations of NSGA-II for one iteration are as follows:
(1) Non-dominated sorting: \(O\left( {M\left( {2N} \right)^{2} } \right)\)
(2) Crowding-distance assignment: \(O\left( {M\left( {2N} \right){\text{log}}\left( {2N} \right)} \right)\)
(3) Tournament selection: \(O\left( N \right)\)
(4) Crossover, Mutation and Elitism: \(O\left( N \right)\)
Here, M represents the number of objectives while N represents the size of the NSGA-II population. The non-domination-based sorting function governs the overall computational complexity of the NSGA-II algorithm. Hence, the proposed NSGA-II-based UAV trajectory optimization scheme shows the complexity of \(O\left( {MN^{2} } \right)\) level [37].
If the time complexity is to be talked about, then the proposed scheme took 9.70993 s execution time when executed on a 2.39 GHz Core i3 processor-based system. Thus, the time complexity of the proposed scheme is 9.70993 s.
5 Simulation & analysis of proposed protocol
The proposed NSGA-II-based protocol has been applied to the UAV-WSN of 128 nodes and a single UAV-based sink. Figure 10 shows the implantation of the target UAV-WSN in a 100 m X 100 m sensing area. Ground nodes are equally divided into 16 clusters and the UAV’s flight trajectory is optimized using the proposed NSGA-II-based protocol.
The performance of the proposed UAV-WSN protocol has been estimated in terms of network lifetime, network stability period, energy efficiency, throughput, end-to-end delay, and implementation cost metrics. MATLAB scripts along with the optimization toolbox (Version R2018a) are used to assess the protocol performance. The proposed protocol is simulated on a 2.39 GHz Core i3 processor-based computing system with 4 GB RAM. Table 4 depicts different simulation parameters.
For proving the authenticity and better performance of obtained results, they are compared with the results of SEP [8], ECRP [2], RAMSS [14], and HC-URP [41] protocols. The Stable Election Protocol (SEP) is a clustering-based data routing protocol while Energy aware Cluster-based Routing Protocol (ECRP) is a hybrid Multihop-Clustering-based protocol. The SEP and ECRP are applicable for the WSN system with the fixed sink node. The Routing algorithm with mobile sink support (RAMSS) protocol is applicable for mobile sink-based WSN systems. The Hierarchical clustering-based UAV Routing Protocol (HC-URP) is applicable for UAV sink-based WSN system.
5.1 Network lifetime & energy efficiency
The count of transmission rounds performed by the network until its first node dies indicates network’s stability, whereas the amount of transmission rounds performed by the network until all its nodes die, indicates its lifetime. Figure 12 depicts the stability and lifetime periods of different protocols by showing the number of alive nodes vs the number of data transmission rounds. Table 5 shows the statistics of network stability and lifetime performance for different protocols.

Network lifetime performance
As per the results obtained, the proposed NSGA-II-based UAV-WSN protocol provides the network stability period of 1290 data-transmission rounds, while the SEP, ECRP RAMSS, and HC-URP protocols show the stability periods of 527, 1185, 1233, and 632 data-transmission rounds, respectively. Likewise, the proposed NSGA-II-based UAV-WSN protocol provides the enhanced network lifetime period of 3888 rounds, while the SEP, ECRP, RAMSS, and HC-URP protocols show the lifetime periods of 2145, 1765, 2542, and 2981 transmission rounds, respectively. Hence, the obtained results reveal that the proposed UAV-WSN protocol provides a remarkable increase in network stability period and lifetime as compared to other existing protocols.
The SEP and ECRP protocols are applicable for the ground sink-based WSN while RAMSS is applicable for Sink Mobility-based WSN. The mobile sink offers a significant reduction in node energy consumption in data transmission by reducing the mean distance between the nodes and the sink. Hence, RAMSS offers increased network lifetime as compared to SEP and ECRP protocols.
The HC-URP protocol is applicable for UAV-based WSN systems. As compared to the ground-based mobile sink, the UAV sink avoids the ground obstacles, establishes line-of-sight communication with the ground sensor nodes, and offers a substantial reduction in node energy consumption in data transmission. Thus, the HC-URP offers an increased network lifetime as compared to SEP, ECRP, and RAMSS protocols. However, HC-URP does not incorporate any trajectory optimization mechanism.
The proposed protocol integrates the multi-objective NSGA-II optimization algorithm that optimizes the flight trajectory of the UAV sink for minimized node energy consumption in data transmission. Hence, the ground sensor nodes work for a longer operating period. Hence, the proposed NSGA-II optimization-based UAV-WSN protocol provides a remarkable increase in network lifetime as compared to other existing protocols.
Figure 13 shows the residual energy performances of the various protocol. The results prove that the proposed UAV-WSN protocol attains an energy efficiency of 70.25% as compared to other protocols.

Network residual energy performance
5.2 Throughput
A network's throughput is a measure of its ability to deliver node data packets to the sink node, successfully. Figure 14 displays the number of data packets reaching the sink without dropping. The results depict that the proposed NSGA-II-based UAV-WSN protocol offers a successful delivery of 2.026 X 105 packets to sink in 3500 transmission rounds. While, in the same number of transmission rounds, successful packet delivery counts for SEP, ECRP, RAMSS and HC-URP protocols are 0.28 X 105, 0.62 X 105, 1.46 X 105 & 1.00 X 105 packets, respectively.

Network throughput performance
From the obtained result, it is also observed that the SEP and ECRP protocols deliver the least throughput performance. Both of these protocols are applicable for wireless sensor networks with a fixed grounded sink node. Here, the node signals commonly face multipath fading and increased path loss due to ground obstacles and vegetation. The mobile-sink and UAV-sink-based techniques can reduce the average distance between nodes and sinks. Due to this, the average path loss is reduced and the network throughput is also improved. Hence, the mobile sink-based RAMSS protocol and the UAV sink-based HC-URP protocol offer improved throughput performances. However, HC-URP does not incorporate any trajectory optimization mechanism.
The proposed UAV sink-based protocol incorporates the multi-objective NSGA-II optimization algorithm that optimizes the flight trajectory of the UAV sink for minimum node energy consumption in data transmission, minimum UAV energy consumption in data collection, and the maximum RSSI. Enhancement in RSSI provides a remarkable enhancement in network throughput. Hence, the proposed UAV-WSN protocol provides a remarkable increase in network throughput as compared to other existing protocols.
5.3 End to end delay (latency)
A network's latency performance is a measure of end to end delay in data communication over a wireless sensor network. Figure 15 depicts the end to end network latency results applicable for the different protocols. As the result depicts, the proposed protocol shows a latency of 150 ms which is better than the latency performances shown by the SEP, ECRP, and HC-URP protocols. However, the sink mobility-based RAMSS protocol shows the least latency result of 135 ms.

Network latency performance
5.4 Financial cost for implementation
The cost of the physical installation of a UAV-based wireless sensor network comprises of following expenses:
(a)Cost for implanting ground nodes and sink node.
(b) Cost of UAV and its control system.
(c)Other various expenditures such as the cost of recharging node batteries and cost of software implementation, etc.
Table 6 presents an account of the fiscal cost of implementing different protocols. Here the Csn is the per unit cost of a sensor node, Csink the per unit cost of a sink node, CUAV is the cost of UAV and its control system, and CTrajectory is the cost of building the trajectory for a ground-based mobile sink. The number of sensor nodes is “n.” Here we have assumed that the Csn and Csink are common for each protocol.
The RAMSS is a ground-based mobile sink WSN protocol. The cost of building the trajectory for a ground-based mobile sink is usually much higher than implementing a UAV-based sink node. Hence, as per the cost analysis given in Table 6, the cost of implementing a UAV-based WSN is lower than implementing a ground-based mobile sink WSN. However, the implementation of UAV-based WSN is expensive as compared to a general WSN system.
6 Conclusions and future work
An optimized flight trajectory for UAV-based sink offers the enhanced network lifetime and throughput performance of a UAV-WSN. In this paper, we presented an NSGA-II-based UAV-WSN protocol that considers the optimized planning of the UAV’s flight trajectory along with the clustering-based data routing. The proposed UAV-WSN protocol provides an optimized UAV flight trajectory that achieves the objectives of minimum node energy consumption in data transmission, minimum UAV energy consumption in data collection, and maximum RSSI. Enhancement in RSSI provides a remarkable enhancement in network throughput. The simulation results reveal that the proposed UAV-WSN protocol provides improved network lifetime and network throughput rate compared to other state-of-the-art existing protocols.
The proposed UAV-WSN protocol implements single-UAV-based data collection in wireless sensor networks. The use of a single UAV degrades the network’s average Age of Information (AoI) performance. Moreover, the single UAV-based UAV-WSN system may show the coverage-hole problem for sparse networks.
6.1 Future work
Our future work will focus on developing a multi-UAV-based UAV-WSN protocol that would optimize the UAV’s flight paths to achieve the following objectives simultaneously: (a) Minimization of UAV and node energy consumption (b) Maximization of node coverage and data collection efficiency (c) Minimization of Network’s average AoI. Further, the projected multi-UAV-based UAV-WSN protocol will incorporate the hybrid TDMA and FDMA-based MAC mechanism that will overcome the issues of cross-channel interference in a multi-UAV sink situation.
Data availability
The authors confirm that the data supporting the findings of this study are included within the article.
References
Singh MK, Amin SI (2020) Energy efficient wireless sensor network using optimum hops and virtual MIMO technique. SN Appl Sci. https://doi.org/10.1007/s42452-020-03360-3
Moussa N, Hamidi-Alaoui Z, El Belrhiti A, El Alaoui, (2020) ECRP: an energy-aware cluster-based routing protocol for wireless sensor networks. Wireless Netw 26(4):2915–2928. https://doi.org/10.1007/s11276-019-02247-5
Heinzelman WR, Chandrakasan A, & Balakrishnan H (2000) Energy-efficient communication protocol for wireless microsensor networks, In: Proceedings of the 33rd annual Hawaii international Conference on system sciences, IEEE, pp 10
Oubbati OS, Lakas A, Zhou F, Güneş M, Lagraa N, Yagoubi MB (2017) Intelligent UAV-Assisted routing protocol for urban VANETs. Comput Commun 107:93–111
Barrado C, Meseguer-Pallarés R, Lopez J, Pastor E, Santamaria E, Royo P (2010) Wildfire monitoring using a mixed air-ground mobile network. IEEE Pervasive Comput 9:24–32
Lottes P, Khanna R, Pfeifer J, Siegwart R, Stachniss C (2017) UAV-Based crop and weed classification for smart farming, In: Proceedings of the 2017 IEEE international Conference on robotics and automation (ICRA), Singapore, pp 3024–3031
Choudhary A, Nizamuddin M, Singh MK et al (2019) Energy budget based multiple attribute decision making (EB-MADM) algorithm for cooperative clustering in wireless body area networks. J Electr Eng Technol 14:421–433. https://doi.org/10.1007/s42835-018-00006-8
Smaragdakis G, Matta I, & Bestavros A (2004) SEP: A stable election protocol for clustered heterogeneous wireless sensor networks, In: Second international workshop on sensor and actor network protocols and applications (SANPA 2004), Vol 3, Boston, MA
Choudhary A, Nizamuddin M, Sachan VK (2020) A hybrid fuzzy-genetic algorithm for performance optimization of cyber physical wireless body area networks. Int J Fuzzy Syst 22:548–569. https://doi.org/10.1007/s40815-019-00751-6
Singh MK, Amin SI, Choudhary A (2021) Genetic algorithm based sink mobility for energy efficient data routing in wireless sensor networks. AEU-Int J Electron Commun 131:153605. https://doi.org/10.1016/j.aeue.2021.153605
Han J (2020) Wireless communications by Theodore S. Rappaport Pearson, New York
Leu J-S, Chiang T-H, Min-Chieh Yu, Kuan-Wu Su (2015) Energy efficient clustering scheme for prolonging the lifetime of wireless sensor network with isolated nodes. IEEE Commun Lett 19(2):259–262. https://doi.org/10.1109/LCOMM.2014.2379715
Heinzelman WB, Chandrakasan AP, Balakrishnan H (2002) An application-specific protocol architecture for wireless microsensor networks. IEEE Trans Wirel Commun 1(4):660–670. https://doi.org/10.1109/TWC.2002.804190
Wang J, Gao Y, Liu W, Sangaiah AK, Kim HJ (2019) Energy efficient routing algorithm with mobile sink support for wireless sensor networks. Sensors 19(7):1494
Mozaffari M, Saad W, Bennis M, Nam YH, Debbah M (2019) A tutorial on UAVs for wireless networks: applications, challenges, and open problems. IEEE Commun Surv Tutorials 21(3):2334–2360. https://doi.org/10.1109/COMST.2019.2902862
Luo C, Chen W, Li D, Wang Y, Hongwei Du, Lidong Wu, Weili Wu (2021) “Optimizing flight trajectory of UAV for efficient data collection in wireless sensor networks. Theoret Comput Sci 853:25–42
Wu P, Xiao F, Huang H, Sha C, Yu S (2020) Adaptive and extensible energy supply mechanism for UAVs-aided wireless-powered internet of things. IEEE Internet Things J 7(9):9201–9213. https://doi.org/10.1109/JIOT.2020.3005133
Xiang H, Tian L (2011) Development of a low-cost agricultural remote sensing system based on an autonomous unmanned aerial vehicle (UAV). Biosyst Eng 108:174–190
Sun P, Boukerche A (2018) Performance modeling and analysis of a UAV path planning and target detection in a UAV-based wireless sensor network. Comput Netw 146:217–231. https://doi.org/10.1016/j.comnet.2018.09.022
Arafat MY, Habib MA, Moh S (2020) Routing protocols for UAV- aided wireless sensor networks. Appl Sci 10:4077. https://doi.org/10.3390/app10124077
Liu J, Tong P, Wang X, Bai B, Dai H (2021) UAV-Aided data collection for information freshness in wireless sensor networks. IEEE Trans Wirel Commun 20(4):2368–2382. https://doi.org/10.1109/TWC.2020.3041750
Mao C, Liu J, & Xie L (2020) Multi-UAV aided data collection for age minimization in wireless sensor networks, In: 2020 International Conference on wireless communications and signal processing (WCSP), IEEE, pp 80-85
Mazayev A, Correia N, Schütz G (2016) Data gathering in wireless sensor networks using unmanned aerial vehicles. Int J Wirel Inf Netw 23:297–309. https://doi.org/10.1007/s10776-016-0319-y
Jawhar I, Mohamed N, Al-Jaroodi J, Zhang S (2013) A framework for using unmanned aerial vehicles for data collection in linear wireless sensor networks. J Intell Robot Syst 74:437–453
Martinez-de Dios JR, Lferd K, de San Bernabé A, Núnez G, Torres-González A, Ollero A (2013) Cooperation between UAS and wireless sensor networks for efficient data collection in large environments. J Intell Robot Syst 70(1):491–508
Zanjie H, Hiroki N, Nei K, Fumie O, Ryu M, Baohua Z (2014) Resource allocation for data gathering in UAV-Aided wireless sensor networks, In: Proceedings of the 2014 4th IEEE international Conference on network infrastructure and digital content, Karlskrona, Sweden, 19–21 pp 11–16
Okcu H, Soyturk M (2014) Distributed clustering approach for UAV integrated wireless sensor networks. Int J Ad Hoc Ubiquitous Comput 15:106
Uddin M, Mansour A, Le Jeune D, Ammad-Uddin M, Aggoune E (2018) UAV-Assisted dynamic clustering of wireless sensor networks for crop health monitoring. Sensors 18:555
Caillouet C, Giroire F, Razafindralambo T (2019) Efficient data collection and tracking with flying drones. Ad Hoc Netw 89:35–46
Ebrahimi D, Sharafeddine S, Ho P-H, Assi C (2018) UAV-Aided projection-based compressive data gathering in wireless sensor networks. IEEE Internet Things J 6:1893–1905
Poudel S, Moh S (2021) Hybrid path planning for efficient data collection in uav-aided wsns for emergency applications. Sensors 21:2839. https://doi.org/10.3390/s21082839
Nazib RA, Moh S (2021) Energy-efficient and fast data collection in uav-aided wireless sensor networks for hilly terrains. IEEE Access 9:23168–23190. https://doi.org/10.1109/ACCESS.2021.3056701
Ebrahimi D, Sharafeddine S, Ho PH, & Assi C (2018) Data collection in wireless sensor networks using UAV and compressive data gathering, In: 2018 IEEE global communications Conference (GLOBECOM), IEEE, pp 1-7
Gupta GP, Chawra VK, & Dewangan S (2019) Optimal path planning for UAV using NSGA-II based metaheuristic for sensor data gathering application in wireless sensor networks, In: 2019 IEEE international Conference on advanced networks and telecommunications systems (ANTS), IEEE, GPpp 1-5
Amit Choudhary M, Nizamuddin MZ, Sachan VK (2020) Multi-objective optimization framework complying IEEE 802.15.6 communication standards for wireless body area networks. Wireless Netw 26(6):4339–4362. https://doi.org/10.1007/s11276-020-02342-y
Popescu D, Dragana C, Stoican F, Ichim L, Stamatescu G (2018) A collaborative UAV-WSN network for monitoring large areas. Sensors 18:4202
Deb K, Pratap A, Agarwal S, Meyarivan TAMT (2002) A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans Evolut Comput 6(2):182–197. https://doi.org/10.1109/4235.996017
Abeywickrama HV, Jayawickrama BA, He Y, Dutkiewicz E (2018) Comprehensive energy consumption model for unmanned aerial vehicles, based on empirical studies of battery performance. IEEE Access 6:58383–58394. https://doi.org/10.1109/ACCESS.2018.2875040
Singh SP, Sharma SC (2017) Genetic-algorithm-based energy-efficient clustering (gaeec) for homogenous wireless sensor networks. IETE J Res 64(5):648–659. https://doi.org/10.1080/03772063.2017.1364981
Singh S, Malik A, Kumar R, Singh PK (2021) A proficient data gathering technique for unmanned aerial vehicle-enabled heterogeneous wireless sensor networks. Int J Commun Syst 34(16):e4956. https://doi.org/10.1002/dac.4956
Ammad-Udin M, Mansour A, Le Jeune D, Aggoune EHM, & Ayaz M (2016) UAV routing protocol for crop health management, In: 2016 24th European signal processing Conference (EUSIPCO), IEEE, pp 1818-1822
Amit Choudhary M, Nizamuddin MZ (2022) Body node coordinator placement algorithm for wban using multi-objective swarm optimization. IEEE Sens J 22(3):2858–2867. https://doi.org/10.1109/JSEN.2021.3135269
Intel Australia, (2017). Specifications for the Intel Aero Ready to Fly Drone [Online]. Available: https://www.intel.com.au/content/www/au/en/support/articles/ 000023272/drones/development-drones.html
DUALSKY Advanced Power Systems, “Dualsky Xpower ECO-S V2 Series 25–30C” [Online]. Available: http://www.dualsky.com/ECO_Series/Xpower_ECO-S.shtml
Singh MK, Amin SI, Choudhary A (2021) A survey on the characterization parameters and lifetime improvement techniques of wireless sensor network. Frequenz 75(9–10):431–448. https://doi.org/10.1515/freq-2020-0163
Acknowledgements
We sincerely thank department of electronics & communication engineering, KIET Group of Institutions, Ghaziabad, India, for providing the opportunity and guidance for research work.
Funding
Not Applicable.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Singh, M.K., Choudhary, A., Gulia, S. et al. Multi-objective NSGA-II optimization framework for UAV path planning in an UAV-assisted WSN. J Supercomput 79, 832–866 (2023). https://doi.org/10.1007/s11227-022-04701-2
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11227-022-04701-2