
This study proposes a new numerical-and-analytical method for solving geometrically nonlinear problems of bending of complex-shaped plates made of functionally graded materials developed. The problem was formulated within the framework of a refined higher-order theory considering the quadratic law of distribution of transverse tangential stresses along the plate thickness. To linearize the nonlinear problem, we used the method of continuous continuation in the parameter associated with the external load. For the variational formulation of the linearized problem, a Lagrange functional was constructed, defined at kinematically possible displacement velocities. To find the main unknowns of the problem of nonlinear plate bending (displacements, strains, and stresses), the Cauchy problem for a system of ordinary differential equations is formulated. The Cauchy problem was solved by the Runge-Kutta–Merson method with automatic step selection. The initial conditions are found from the solution of the problem of geometrically linear deformation. The right-hand sides of the differential equations, at fixed values of the load parameter corresponding to the Runge-Kutta–Merson scheme, were obtained from the solution of the variational problem for the Lagrange functional. The variational problems were solved by the Ritz method in combination with the R-function method. The latter makes it possible to present an approximate solution as a formula. This solution structure exactly satisfies all (general structure) or part (partial structure) of the boundary conditions. Test problems are solved for a homogeneous rigidly fixed and functionally graded hinged square plate subjected to a uniformly distributed load of varying intensity. The results for deflections and stresses obtained by the developed method are compared with the solutions obtained by radial basis functions. The problem of bending of a functionally graded plate of complex shape is solved. The influence of the gradient properties of the material and geometric shape on the stress-strain state is investigated.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction. Functional graded materials (FGM) belong to a class of modern materials from the family of composites. They usually consist of two microstructural phases, such as metal and ceramic, which makes them resistant to high temperatures, corrosion, and mechanical stress. The mechanical and other properties of FGMs change continuously and smoothly in certain directions following a set law. This avoids sharp interlaminar tears and stress concentrations caused by mismatches in the properties of two different materials. Due to their high strength and heat resistance, ceramic-metal FGMs are used in various engineering fields, including aerospace and chemical industries, energy, shipbuilding, etc.
For example, a fairly complete review of models and methods for solving nonlinear problems of deformation of shells and plates made of functionally graded materials is given in [1,2,3]. To formulate the initial problem, both the classical geometrically nonlinear formulation [4] and refined formulations are used: First-order shear deformation theory (FSDT) [5, 6] and various refined higher-order theories (HSDT) [7,8,9,10]. The first-order shear theory has certain disadvantages associated with the assumption that the shear strain is constant with thickness. Refined higher-order theories increase the accuracy of stress calculations but at the expense of increased computational costs.
Most often, researchers consider plates of canonical geometric shape. Under certain conditions of loading and fixation, it is possible to obtain the solution of the boundary value problem in an analytical form. If the plate has a complex geometric shape, it is necessary to use universal methods to find an approximate solution in areas of complex shape. These are, first of all, the finite element method [11, 12], the R-function method [13, 14], the “immersion” method [15], etc. The R-function method was first extended to study the geometrically nonlinear bending of functionally graded plates in [14]. Here, the linearization of the initial nonlinear system of equations written within the framework of the classical theory of Carman-type plates is carried out by successive loads and Newton. The finite element method (FEM) for calculating the FGM of plates is used, for example, in [1, 10]. As for the use of the FEM to study the deformation of structural elements with FGM, the monograph [16] emphasizes that, in this case, it may be unacceptable and lead to qualitatively incorrect results. As the analysis of the above sources shows, the number of works devoted to studying geometrically nonlinear deformation of plates of complex shapes with FGM is quite limited, and the search for effective methods for solving such problems continues today.
This work aims to develop a numerical-analytical method for studying the geometrically nonlinear deformation of plates of complex shapes with FGM based on the refined theory and R-functions method.
Problem Formulation and Solution Method.
Consider in a rectangular Cartesian coordinate system \(O{x}_{1}{x}_{2}z\) an isotropic plate of FGM of thickness \(h\) and arbitrary shape \(\Omega \) in plan. The plate is subjected to a transverse load of intensity \({q}_{z}^{*}={q}_{z}^{*}\left({x}_{1}, {x}_{2}\right)\). Let the material properties change continuously along the thickness, and the coordinate surface of the plate coincides with the median surface. Suppose that the upper surface of the \(\left(z=-h/2\right)\) of the plate is metal, and the bottom \(\left(z=h/2\right)\) – ceramic, and the material properties, in particular the elastic characteristics, depend on the volume fraction of the constituent materials and can be expressed as [1, 17]
where \({V}_{c}\) and \({V}_{m}\) are the volume fractions of the reinforcing ceramic material and metal related by the ratio \({V}_{c}+{V}_{m}=1\). Following [1], we assume that the fraction of ceramics \({V}_{c}\) varies in thickness according to the power law
At \(n=0\), we will have a homogeneous ceramic plate; at \(n\to \infty \), we get a metal plate.
To formulate the problem, we will use the refined higher-order theory, which considers the nonlinear distribution of transverse tangential stresses along the thickness [7]. The main hypotheses of the refined theory are written as follows [7]:
where \({\psi }_{i}\left({x}_{1}, {x}_{2}\right)\) are the derived shear functions, \(f\left(z\right)\) is the function of distribution of transverse tangential stresses, which, in the case of coincidence of the coordinate surface of the plate with the median surface, has the following form:
The motion paths of the plate points along the axes \(O{x}_{1}\) and \(O{x}_{2}\) are determined by the formula
where \({u}_{1}\left({x}_{1},{x}_{2}\right), {u}_{2}\left({x}_{1},{x}_{2}\right), w\left({x}_{1}, {x}_{2}\right)\) are the displacements of the points of the coordinate surface of the plate along the \(O{x}_{1}, O{x}_{2}, and Oz\) axes, respectively.
If the deflection arrow is comparable to the plate thickness \(\left({w}_{max}\ge 0.25h\right)\), then the problem must be solved using a geometrically nonlinear theory considering large deflections. We assume that the displacements \({u}_{1}\) and \({u}_{2}\) are much smaller than the deflections \(w\). In this case, the deformations are calculated through the displacements according to the following nonlinear relations [7]:
Stresses and strains are related by Hooke’s law:
where \(E\left(z\right)\) and \(\nu \left(z\right)\) are the Young modulus and Poisson’s ratio of the plate material, respectively, and \(G\left(z\right)=\frac{E\left(z\right)}{2\left(1+\nu \left(z\right)\right)}\) is the shear modulus.
To linearize and formulate the problem of geometrically nonlinear bending of plates, we will use the method of continuous continuation of the solution in terms of the parameter [18]. In the case under consideration, it is natural to relate this parameter to the external load. Let us introduce an increasing parameter \(t\in \left[{t}_{0}, {t}_{*}\right]\) characterizing the loading process, where \({t}_{0}\) is the parameter at which the deflections of the plate will be small and, accordingly, the deformation problem will be geometrically linear; \({t}_{*}\) corresponds to a given load level \({q}_{z}\left({t}_{*}\right)={q}_{z}^{*}\).
Having differentiated the relation (2) by the parameter \(t\), we obtain formulas that relate the derivatives of deformations and displacements:
where the dot above the symbols denotes the derivative \(\frac{d\left(...\right)}{dt}\) by the argument \(t\). In the following, the variable t's derivatives will be called velocities. If we consider the angles of rotation \(w{,}_{i}\) as given functions, then the relations (4) are linear.
Having differentiated Hooke’s law (3) by the variable \(t\) taking into account (4) for the stress rates, we get
For the variational formulation of the problem, we will use the principle of virtual work for quasi-static problems [19]. The corresponding Lagrangian functional, written with respect to the kinematically possible displacement velocities for a three-dimensional body, is as follows [19]:
We assume that \({\dot{v}}_{i,j}\sim \dot{w}{,}_{i}^{2}<<1\) and neglect the higher order terms of smallness in expression (6). Then, for a flexible plate, we can write
Substituting (4) and (5) into (7) and integrating by z, we obtain the Lagrangian functional for the linearized bending problem of a flexible plate:
where \({L}_{l}\left({\dot{u}}_{1}, {\dot{u}}_{2}, \dot{w},{ \dot{\psi }}_{1}, {\dot{\psi }}_{2}\right), {L}_{n}\left({\dot{u}}_{1}, {\dot{u}}_{2}, \dot{w}, { \dot{\psi }}_{1}, and {\dot{\psi }}_{2}\right)\) are the “linear” and “nonlinear” parts of the functionality, which are defined by the following formulas:
In expressions (9) and (10), the stiffness parameters and “dummy” forces \({f}_{11}\), \({f}_{22}\), and \({f}_{12}\) are calculated by the following formulas:
In formula (10), we assume that functions \(w{,}_{1}\), \(w{,}_{2}\), \({f}_{11}\), \({f}_{22}\), and \({f}_{12}\) are given for each fixed value of the parameter \(t\) and do not vary.
The solution of the variational equation \(\delta L=0\) gives the distribution of the displacement velocity fields and shear functions for the values of the parameter \(t>{t}_{0}\) at any point of the plate. The main unknowns of the problem of nonlinear plate bending can be found by integrating the corresponding velocity fields as solutions to the Cauchy problem in terms of the parameter \(t\) for a system of ordinary differential equations:
The initial conditions for equations (11) are obtained from solving the problem of linear deformation at \({q}_{z0}={q}_{z}\left({t}_{0}\right)\). To do this, we can use the functional in the form (9), replacing the velocities of the functions with the functions themselves.
The initial problem for the system of equations (11) will be solved by the Runge-Kutta–Merson (RKM) method with automatic step selection [20]. The right-hand sides of these equations at fixed values \(t>{t}_{0}\) corresponding to the RKM scheme, are found from the solution of the variational problem for the functional (8). We will solve the variational problems using the Ritz and R-function methods (RFM) [13]. The R-function method allows us to present an approximate solution in the form of a formula, which solution structure exactly satisfies the boundary conditions. The solution structure is the basis for constructing systems of coordinate functions of variational methods.
Numerical Results. Let us consider test examples. First, let us solve the problem of bending a homogeneous square rigidly fixed plate [21] under a uniformly distributed load. The geometric dimensions of the plate are: side length \(2a=7.62\) m, thickness \(h=0.0762\) m. Elastic characteristics of the material are \(E=2.1\times 1{0}^{5}\) MPa and \(\nu =0.316\).
The boundary conditions for rigid anchoring are as follows:
and the corresponding solution structure is
where \({\Phi }_{i} \left(i=\overline{1, 5}\right)\) are the uncertain components of the solution structure; function \(\omega =\omega \left({x}_{1}, {x}_{2}\right)\) is constructed using the theory of R-functions and satisfies the conditions: \(\omega =0\), \(\omega {,}_{n}=-1\) for the boundary \(\partial \Omega \), \(\omega >0\) inside \(\Omega \) (\(\overrightarrow{n}\) is the outer normal to the contour \(\partial \Omega \)). The requirement of normalization of the function \(\omega \) to the first order \(\left(\omega {,}_{n}=-1\right)\), in some cases, is not mandatory.
In the case of a square plate, the function \(\omega \) has the form
where \({\omega }_{1}=\frac{1}{2a}\left({a}^{2}-{x}_{2}^{2}\right),\) \({\omega }_{2}=\frac{1}{2a}\left({a}^{2}-{x}_{1}^{2}\right),\) \({\wedge }_{0}\) denotes an R-conjunction [13], \({\omega }_{1}{\wedge }_{0}{\omega }_{2}={\omega }_{1}+{\omega }_{2}-\sqrt{{\omega }_{1}^{2}+{\omega }_{2}^{2}}\).
In the numerical implementation, the uncertain components of the solution structure were represented as finite series \({\Phi }_{i}\left({x}_{1}, {x}_{2}, t\right)={\sum }_{n}{C}_{n}^{(i)}\left(t\right){\varphi }_{n}^{(i)}\left({x}_{1}, {x}_{2}\right)\), where \({C}_{n}^{(i)}\left(t\right)\) are uncertain coefficients that were found at each step by the Ritz method, \(t\) is a fixed value of the load parameter, \(\left\{{\varphi }_{n}^{(i)}\right\}\) – systems of linearly independent functions. For \(\left\{{\varphi }_{n}^{(i)}\right\}\) can be taken as ordinary power polynomials, Chebyshev polynomials, splines, etc. [13]. Here, for \(\left\{{\varphi }_{n}^{(i)}\right\}\), we used power polynomials of the form \({x}_{1}^{k}{x}_{2}^{l}\) (the degree of a polynomial is defined as \(P=k+l\)). When solving problems by the method of R-functions, the symmetry of the solution was taken into account.
For the external load, we assume a linear law:
where \(t\in \left[0, {t}_{*}\right]\).
For this example, we assumed \({q}_{z0}={q}_{z1}={10}^{-2}\mathrm{M\Pi a}\).
Figure 1 shows graphs of dimensionless deflections \(\overline{w }=w/h\) in the center of the plate depending on the value of the dimensionless load \(\overline{q }=\frac{16{q}_{z}{a}^{4}}{E{h}^{4}}\), where the dots indicate the results obtained in [21] by the radial point interpolation method (RPIM) in combination with the Newton–Raphson method, and the solid line is the R-function method. Table 1 shows the results of calculating normal dimensionless stresses \({\tilde{\sigma }}_{11}=\frac{4{\sigma }_{11}{a}^{2}}{E{h}^{2}}\) in the center of the plate on the bottom surface (\(z=0.5h\)) obtained by the RPIM method and the RFM method.

Dimensionless deflections in the center of the plate.
Next, we consider the problem of bending square-hinged plates with side \(2a=0.2 {\text{m}}\) and thickness \(h=0.01 {\text{m}}\) from the functionally graded material Ti-6Al-4V/aluminum oxide [21]. The elastic characteristics of the titanium alloy (Ti-6Al-4V) are: \({E}_{m}=1.057\times 1{0}^{5} {\text{MPa}}\), \({\nu }_{m}=0.298\), ceramic material (aluminum oxide): \({E}_{c}=3.202\times 1{0}^{5} \mathrm{MPa}\), \({\nu }_{c}=0.26\).
The boundary conditions for the hinged support are as follows:
where \({\dot{u}}_{\tau }={\dot{u}}_{2}{n}_{1}-{\dot{u}}_{1}{n}_{2}\), \({\dot{\psi }}_{\tau }={\dot{\psi }}_{2}{n}_{1}-{\dot{\psi }}_{1}{n}_{2}\), \({n}_{1}, {n}_{2}\) are the directional cosines of the normal \(\overrightarrow{n}\) to the contour of the plate \(\partial \Omega \).
The structure of the solution satisfying the conditions (13) can be written as follows:
The calculations were performed for the following power factor values in (1): \(n=\left\{0.2, 2.0, 100.0\right\}\). Figure 2 shows graphs of the dimensionless central deflections \(\overline{w }=w/h\) as a function of the dimensionless load \(\overline{q }=\frac{16{q}_{z}{a}^{4}}{{E}_{m}{h}^{4}}\).

Dimensionless deflections in the center of hinged FGM plates, where dots and solid lines correspond to results obtained by the RPIM [21] and RFM methods, respectively.
It can be seen that the central deflection increases with the increase of the degree index, and the behavior becomes more nonlinear, since the Young’s modulus of the metal is smaller than that of the ceramic material.
In formula (12), for the external load, we took \({q}_{z0}={q}_{z1}=0.5 {\text{MPa}}\). The initial step and calculation error in the FEM method in both test examples were set as follows: \(\Delta {t}_{0}=1{0}^{-3}\), \(\varepsilon =1{0}^{-3}\).
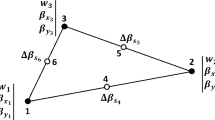
Consider the bending of a functionally graded plate of complex shape with elliptical cutouts (Fig. 3), which is subjected to a uniformly distributed load. The geometric dimensions of the plate are: \(a=0.15 \mathrm{m}\), \(b=0.1 \mathrm{m}\), \(c=0.06 \mathrm{m}\), \(d=0.07 \mathrm{m}\), and thickness \(h=0.01 \mathrm{m}.\) The plate material is the same as in the previous example.

Plate with a complex shape.
The equation of the boundary of the domain in Fig. 3 can be written as follows:
where
Boundary conditions corresponding to a fixed hinge are set on the plate contour:
where \({\dot{u}}_{n}={\dot{u}}_{1}{n}_{1}+{\dot{u}}_{2}{n}_{2},\) \({\dot{\psi }}_{n}={\dot{\psi }}_{1}{n}_{1}+{\dot{\psi }}_{2}{n}_{2}\).
The structure of the solution that satisfies the conditions (14) is as follows:
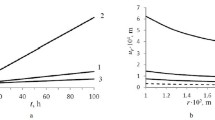
Figures 4 and 5 are graphs of dimensionless deflections \(\overline{w}\) and stresses \({\overline{\sigma }}_{11}\) on the lower surface in the center of the plates of complex shape (solid curves) and rectangular plates (dashed curves) depending on the dimensionless load \(\overline{q }\) and the value of the degree index \(n\). It can be seen that the side cuts make the plate more rigid, reducing deflections and stresses. For the external load, we took \({q}_{z0}={q}_{z1}=0.5 {\text{MPa}}\). The initial step and calculation error were equal to \(\Delta {t}_{0}=1{0}^{-3}\), \(\varepsilon =1{0}^{-3}\).

Dimensionless deflections in the plate center.

Dimensionless stresses on the bottom surface in the plate center.
Conclusions. A new numerical-and-analytical method for solving bending problems of flexible plates of complex shapes made of functionally graded materials has been developed. The problem is formulated within the framework of a refined higher-order theory that considers the quadratic law of distribution of transverse tangential stresses along the thickness. The method is based on the use of the method of R-functions and the method of continuous continuation in a parameter. Test problems for plates with different fixation conditions are solved, and the agreement with solutions obtained by other methods is shown. The influence of material gradient properties and geometric shape on the stress-strain state is investigated.
References
J. N. Reddy, “Analysis of functionally graded plates,” Int J Numer Meth Eng, 47, 663–684 (2000).
H. S. Shen, Functionally Graded Materials. Nonlinear Analysis of Plates and Shells, CRC Press, Florida (2009).
H.-T. Thai and S.-E. Kim, “A review of theories for the modeling and analysis of functionally graded plates and shells,” Compos Struct, 128, 70–86 (2015).
A. S. Volmir, Flexible Plates and Shells [in Russian], Gosteorizdat, Moscow (1956).
E. Reissner, “On the theory of bending of elastic plates,” J Math Phys, 23, 184–191 (1944).
Y. Urthaler and J. N. Reddy, “A mixed finite element for a nonlinear bending analysis of laminated composite plates based on FSDT,” Mech Adv Mater Struc, 15, 335–354 (2008).
A. O. Rasskazov, I. I. Sokolovskaya, and N. A. Shulga, Theory and Calculation of Layered Orthotropic Plates and Shells [in Russian], Vyshcha Shkola, Kiev (1986).
J. N. Reddy, “A simple higher-order theory for laminated composite plates,” J Appl Mech, 51, 745–752 (1984).
J. N. Reddy, “Refined nonlinear theory of plates with transverse shear deformation,” Int J Solid Struct, 20, 881–896 (1984).
M. Talha and B. N. Singh, “Static response and free vibration analysis of FGM plates using higher order shear deformation theory,” Appl Math Model, 34, 3991–4010 (2010).
K. J. Bathe and E. L. Wilson, Numerical Methods in Finite Element Analysis, Prentice-Hall, Englewood Cliffs, NJ (1976).
M. L. Bucalem and K. J. Bathe, “Finite element analysis of shell structures,” Arch Comput Method E, 4, 1, 3–61 (1997).
V. L. Rvachev, Theory of R-Functions and Some of Its Applications [in Russian], Naukova Dumka, Kiev (1982).
L. V. Kurpa, E. I. Lyubitskaya, and I. O. Morachkovskaya, “Geometrically nonlinear bending of functionally graded plates on an elastic base,” Visnyk Dnipropetrovsk Univ., Ser. Mechanics of Non-Homogeneous Structures, Issue 2 (21), 77–88 (2017).
N. V. Smetankina, A. N. Shupikov, S. Yu. Sotrikhin, and V. G. Yareschenko, “A noncanonically shape laminated plate subjected to impact loading: Theory and experiment,” J Appl Mech, 75, No. 5, 051004-1–051004-9 (2008).
S. M. Aizikovich, V. M. Aleksandrov, A. S. Vasiliev, et al., Analytical Solutions of Mixed Axisymmetric Problems for Functionally Graded Media [in Russian], Fizmatlit, Moscow (2011).
X. Zhao and K. M. Liew, “Geometrically nonlinear analysis of functionally graded plates using the element-free kp-Ritz method,” Comput Meth Appl Mech Eng, 198, 2796–2811 (2009).
E. I. Grigolyuk and V. I. Shalashilin, “Method of continuation in parameter for problems of nonlinear deformation of rods, plates, and shells,” in: Studies in the Theory of Plates and Shells [in Russian], Issue 17, No. 1, Kazan (1984), pp. 3–58.
K. Washizu, Variational Methods in Elasticity and Plasticity, Pergamon Press (1982).
V. I. Krylov, V. V. Bobkov, and P. I. Monastyrnyi, Computational Methods [in Russian], Nauka, Moscow (1977).
V. N. Van Do and C.-H. Lee, “Nonlinear analyses of FGM plates in bending by using a modified radial point interpolation mesh-free method,” Appl Math Model, 57, 1–20 (2018).
Author information
Authors and Affiliations
Corresponding author
Additional information
Translated from Problemy Mitsnosti, No. 5, pp. 63 – 74, September – October, 2023.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Sklepus, S.M. Numerical-and-Analytical Method for Solving Geometrically Nonlinear Bending Problems of Complex-Shaped Plates from Functionally Graded Materials. Strength Mater 55, 927–936 (2023). https://doi.org/10.1007/s11223-023-00583-8
Received:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11223-023-00583-8