
Abstract
Quantum Fisher information as an important quantity in quantum metrology determines the upper bound of the measurement accuracy. It is shown that the quantum feature such as entanglement can improve quantum Fisher information in some cases. Here we study how quantum coherence affects the quantum Fisher information from a general point of view. We find out that the bounds induced by the superposed states can well restrict the quantum Fisher information in a general parameter estimation scheme. As applications, we demonstrate these bounds by a parameter estimation process with the superposition input state undergoing different quantum channels.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Quantum coherence as the most fundamental quantum feature originates from the quantum state superposition principle which is closely related to the other quantum features such as entanglement, quantum discord, quantum non-locality. Recently, quantum coherence has been widely studied in the point of resource theory of view [1,2,3,4,5,6,7]. Roughly speaking, the quantum features could be dominated by the systematic quantum coherence to some extent. However, the superposition in quantum mechanics does not always play the expected role. It could ensure the existence of some quantum feature, while it could also lead to the coherent destruction. The obvious example is the vanishing entanglement for the superposition of two Bell states with equal amplitudes. A mathematically general treatment on the effects of superposition for the quantum entanglement was first addressed in Ref. [8] which shows von Neumann entropy entanglement of a superposition state is well limited by the entanglement of the superposed states. Later, how the entanglement of a superposition state is distributed among its components was studied extensively [9,10,11,12,13,14,15,16,17,18,19,20]. Due to the close relationship between quantum coherence and general quantum features, it is natural to consider how the quantum feature is distributed among the different components of the superposition state or whether we can give a reference evaluation of the quantum feature for the superposition state based on the features of each component.
In both classical and quantum physics, the parameter estimation (PE) is a central task . Quantum Fisher information (QFI) as an important quantity in PE [21,22,23,24,25,26,27,28,29,30,31,32,33,34,35] can bound the measurement accuracy for some parameters by the remarkable Cramé r–Rao inequality [21] which shows that the larger QFI means higher sensitivity of the PE. Since the pioneer work [22] showed that the precision of phase estimation can beat the shot-noise limit (standard quantum limit), lots of works aiming to improve the measurement accuracy have been done in different aspects such as the PE based on maximally correlated states [26, 36], N00N states [27,28,29], squeezed states [30, 32], or generalized phase-matching condition [33] , and so on. In particular, enormous effects have been devoted to how to improve the precision of PE in the open systems within the Markovian [34] or non-Markovian regimes [35], especially including various environments [37,38,39,40,41,42,43,44,45,46,47,48]. One of the common implications in the relevant jobs mentioned above is that the quantum features in PE procedure could provide a powerful means to enhancing QFI, which directly leads to the significant consideration that how to effectively exploit the quantum features in quantum metrology [29, 43, 44, 49,50,51,52,53,54,55,56,57]. However, such a research in a relatively general PE process is not so easy due to the practically limited computability, especially in the open systems despite its good definition. Only in some particular cases, the QFI can be easily evaluated. Recently, Escher et al. [31] proposed an upper bound \(C_{Q} \) for the QFI in a general protocol to estimate an unknown parameter depicted in Fig. 1, if one Kraus representation of the quantum channel is provided. Of course, the optimization on all the Kraus representations to the quantum channel could reach the upper bound \(C_Q\) and give another definition of the QFI. Considering the Cramér–Rao inequality, one can find that \(C_Q\) actually contributes to the lower bound of the precision of the PE similar to the QFI. In this sense, within a particular measurement protocol, it can effectively avoid the concrete calculation of QFI and be of great significance to consider \(C_Q\) instead of QFI.
In this paper, we mainly consider the general protocol in Fig. 1 and study how \(C_Q\) for the superposition input state is distributed among its superposed components. It is found that \(C_Q\) of the superposition state is well upper and lower bounded by the \(C_Q\) of the superposed components. As applications, we study distribution of \(C_Q\) by considering a qubit superposition state undergoes the depolarization channel, dephasing channel and the amplitude damping channel, respectively. The numerical results validate our bounds. The paper is organized as follows. In Sect. 2, after a brief introduction of QFI, we present our main result about the bounds on \(C_Q\). In Sect. 4, we consider the case with a qubit undergoing various quantum channels. The conclusion is drawn finally.

Quantum parameter estimation process: 1. the initial state preparation; 2. the parametric process via dynamical evolution; 3. the measurement of quantum state; 4. the parameter estimation
2 The parameter estimation and the quantum Fisher information
2.1 The Fisher information
Figure 1 shows a general quantum process to estimate an unknown parameter \(\theta \). In the above scheme, the measurement precision of \(\theta \) is characterized by the uncertainty of the estimated phase \(\theta ^{est}\) defined by
which, for an unbiased estimator, is just the standard deviation [23, 24, 58]. Based on the quantum parameter estimation [23, 24, 58], \(\delta \theta \) is limited by the quantum Cramér–Rao bound as
where \(F_{Q}=\mathrm {Tr}\{\rho _{\theta }L_{\theta }^{2}\}\) is the quantum Fisher information with \(L_{\theta }\) being the symmetric logarithmic derivative defined by [23]
It was shown in Refs. [23, 24, 58] that this bound can always be reached asymptotically by maximum likelihood estimation and a projective measurement in the eigen basis of the “symmetric logarithmic derivative operator.”
In a closed system, if the preparation of the initial state is a pure state \( \rho _{0}=\left| \varphi \right\rangle \left\langle \varphi \right| \), and the dynamic evolution process is unitary evolution \(\hat{U}(\theta )\), then \(F_{Q}\) can be expressed as [31]
where
with \(\hat{H}=i(\mathrm{d}\hat{U}^{\dagger }(\theta )/\mathrm{d}\theta )\hat{U}(\theta )\). It is obvious that the Fisher information is equivalent to the variance of \(2 \hat{H}\).
In the open system, namely, the initial state pure state \(\rho _{0}=\left| \varphi \right\rangle \left\langle \varphi \right| \) undergoes the non-unitary evolution governed by the arbitrary Kraus operators \(\hat{\varPi }_{l}(x)\) as \(\rho (\theta )\equiv \sum \limits _{l}\hat{\varPi }_{l}(\theta )\rho _{0}\hat{\varPi }_{l}^{\dagger }(\theta )\), it can be found in [31] that the quantum Fisher information \(F_{Q}\) is upper bounded by \(C_{Q}\) defined as [31]
with
In particular, it is shown that the exact Fisher information in the open system can be obtained by
where the minimization is taken over all possible Kraus representations that achieve \(\rho (\theta )\).
2.2 Bound on Fisher information of superposition
Let us consider the scheme depicted in Fig. 1. For a initial pure state \( \left| \psi \right\rangle \), a parameter x is imposed on the state by a dynamic procedure \(\hat{\varPi }_{l}(x)\); then, the final state can be denoted by \(\rho (x)=\sum \limits _{l}\hat{\varPi }_{l}(x)\left| \psi \right\rangle \left\langle \psi \right| \hat{\varPi }_{l}^{\dagger }(x)\). We can measure some observable to evaluate the parameter x. It is obvious that \(C_{Q}\) for this parameter x is given by
where \(\hat{H}_{1}(x)\) and \(\hat{H}_{2}(x)\) are defined as Eqs. (7) and (8) for x instead of \(\theta \) and we use the subscript \( \psi \) to label the initial state. Now we suppose the initial state is a superposition state as \(\left| \psi \right\rangle =\sum _{i=1}^{N}\alpha _i \left| \psi _i\right\rangle \). Then we would like to study how \( C_{Q}\left( \left| \psi \right\rangle \right) \) is distributed among the components \(\left| \psi _i\right\rangle \). Thus we will present our main result in the following rigorous form.
Theorem 1
Let the superposition state \(\left| \psi \right\rangle =\sum \limits _{i=1}^{N}\alpha _{i}\left| \psi _{i}\right\rangle \) with \(\sum \limits _{i=1}^{N}\left| \alpha _{i}\right| ^{2}=1\) undergoes the dynamics given in Fig. 1, where x is the parameter to be measured, and then \(C_{Q}\left( \left| \tilde{\psi } \right\rangle \right) \) is bounded by
where, \(\left| \tilde{\psi }\right\rangle =\frac{\left| \psi \right\rangle }{\Vert \left| \psi \right\rangle \Vert }\) with \(\Vert \left| \psi \right\rangle \Vert \) representing the \(l_{2}\) norm of a vector,
with
and
Proof
According to the definition of \(C_{Q}\), we can write \(C_{Q}\) of the state \(\left| \psi \right\rangle \) as
or
The expansion of the two items of \(\left\langle \hat{H}_{1}(x)\right\rangle _{\psi }\) and \(\left\langle \hat{H}_{2}(x)\right\rangle _{\psi }^{2}\) read
and
where \(\left\langle X\right\rangle _{ij}=\left\langle \psi _{i}\right| X\left| \psi _{j}\right\rangle \) and \(\left\langle X\right\rangle _{i}=\left\langle \psi _{i}\right| X\left| \psi _{i}\right\rangle \) for any X. Substituting Eqs. (18) and (19) into Eq. (17), one can find
Based on the definition of \(C_{Q}\), one can also find
Substituting Eq. (21) into Eq. (20), we have
For an observable measurement X, we can always get
which is directly from the absolute value inequality \(\sum a_{i}\le \left| \sum a_{i}\right| \le \sum \left| a_{i}\right| \) and the Cauchy inequality of the number \(a_{i}\). Thus Eq. (22) can be rewritten as
Similarly, based on Eq. (23), one can also find the following inequality holds. That is,
3 Applications
In order to demonstrate the validity of the bounds, we will consider the bound on a initial superposition state of a qubit undergoing the dephasing quantum channel, the amplitude damping channel and the depolarization channel, respectively [59].
The initial pure state can be formally given by
with \(\left| \alpha \right| ^{2}+\left| \beta \right| ^{2}=1\) , where \(\left| \psi _{1}\right\rangle \) and \(\left| \psi _{2}\right\rangle \) will be given in the concrete computation. So the final state after going through various channels can be written as \(\rho (P)=\sum \limits _{l}\hat{\varPi }_{l}(P)\left| \psi \right\rangle \left\langle \psi \right| \hat{\varPi }_{l}^{\dagger }(P)\) with P denoting the measured parameter that is imposed by the channels. Thus based on our theorem, one can calculate \(C_{Q}\left( \left| \psi \right\rangle \right) \) and its corresponding two bounds.
Dephasing channel We first consider the dephasing channel which is described by the Kraus operators \(M_{\mu }\) \((\mu =0,1,2)\) as
The initial superposition state is given by
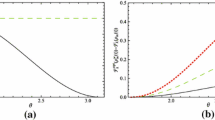
with the randomly generated \(\left| \psi _{1}\right\rangle =[0.9838;0.1795]\); \(\left| \psi _{2}\right\rangle =[0.4186;0.9082]\). In addition, we set \(\alpha =-0.3690\) and \(\beta =0.9294\). The final state after the action of the dephasing channel is denoted by \(\rho (P)\). The Fisher information \(F(\rho (P))\) and its upper bound \(C_{Q}\left( \left| \psi \right\rangle \right) \) are plotted in Fig. 2. It can be found that the Fisher information is upper bounded by \(C_Q\). We especially plot the upper and lower bounds of \(C_{Q}\) in Fig. 2. It is shown that \(C_{Q}\) is well restricted by the two bounds, which, at the same time, indicates the two bounds we obtained are valid.

The QFI, \(C_{Q}\) and the bounds \(B_\pm \) versus the estimated parameter P
Depolarized channelThe depolarized channel is given by
The final state after \(\rho _{0}\) undergoing the evolution of quantum channel is given by
Similarly, we consider two initial states \(\left| \psi _1\right\rangle =[0.8301;0.5579]\) and \(\left| \psi _2\right\rangle =[0.9777;0.2101]\) with \(\alpha =-0.3463\) and \(\beta =0.9381\). Thus similar to Fig. 2, we plot various quantities in Fig. 3. We can find that our theorem has provided the good upper and lower bounds.

The QFI, \(C_{Q}\) and the bounds \(B_\pm \) versus the estimated parameter P
Amplitude damping quantum channelFinally, we also consider the amplitude damping quantum channels given by

Here we consider two initial state randomly generated by MATLAB as \(\left| \psi _1\right\rangle =[0.3706;0.9288]\) and \(\left| \psi _2\right\rangle =[0.8951;0.4459]\). The superposition amplitude is randomly chosen as \(\alpha =0.0495+0.0752i\) and \(\beta =-0.9929\). We plot the bounds of \(C_Q\) and Fisher information in Fig. 4. Our good bounds can also be observed from Fig. 4.

The QFI, \(C_{Q}\) and the bounds \(B_\pm \) versus the estimated parameter P
Finally, we would like to emphasize that all the considered states and the relevant parameters are produced randomly by MATLAB. The tightness of our bounds depends on these states and parameters \(\alpha \) and \(\beta \). In particular, one can find that in Fig. 4, the lower bound \(B_-\) and the Fisher information \(F_Q\) intersect with each other for some particular P. This phenomenon could appear in all the three kinds of quantum channels if we choose other initial states or different \(\alpha \) and \(\beta \). This does not affect the validity of our two bounds on \(C_Q\). It only indicates that in some cases the lower bound \(B_-\) is not so tight as we expected. In other words, it only shows the state dependence of the bounds and the Fisher information.
4 Discussion and conclusion
In this paper, we consider how the superposition input state affects the quantum Fisher information in a general quantum parameter estimation scheme. We obtain that \(C_{Q}\) for the case with the superposition input state can be well bounded by the \(C_Q\)’s corresponding to the cases with each superposed components as input state. Considering \(C_{Q}\) as the compact bound on quantum Fisher information, the upper and lower bounds on \(C_{Q}\) allow us to better evaluate how quantum Fisher information is distributed among its superposed components, which could help us to predict the bound on the maximum accuracy for a parameter estimation process. How the QFI instead of \(C_Q\) is distributed in a general case is a much more interesting question which deserves us forthcoming efforts.
References
Baumgratz, T., Cramer, M., Plenio, M.B.: Quantifying coherence. Phys. Rev. Lett. 113, 140401 (2014)
Streltsov, A., Singh, U., Dhar, H.S., Bera, M.N., Adesso, G.: Measuring quantum coherence with entanglement. Phys. Rev. Lett. 115, 020403 (2015)
Winter, A., Yang, D.: Operational resource theory of coherence. Phys. Rev. Lett. 116, 120404 (2016)
Napoli, C., Bromley, T.R., Cianciaruso, M., Piani, M., Johnston, N., Adesso, G.: Robustness of coherence: an operational and observable measure of quantum coherence. Phys. Rev. Lett. 116, 150502 (2016)
Ma, J., Yadin, B., Girolami, D., Vedral, V., Gu, M.: Converting coherence to quantum correlations. Phys. Rev. Lett. 116, 160407 (2016)
Yu, C.S.: Quantum coherence via skew information and its polygamy. Phys. Rev. A 95, 042337 (2017)
Streltsov, A., Adesso, G., Plenio, M.B.: Colloquium: quantum coherence as a resource (2017). arXiv:1609.02439v2
Linden, N., Popescu, S., Smolin, J.A.: Entanglement of superpositions. Phys. Rev. Lett. 97, 100502 (2006)
Yu, C.S., Yi, X.X., Song, H.S.: Concurrence of superpositions. Phys. Rev. A 75, 022332 (2007)
Gour, G.: Reexamination of entanglement of superpositions. Phys. Rev. A 76, 052320 (2007)
Cavalcanti, D., Terra Cunha, M., Acn, A.: Multipartite entanglement of superpositions. Phys. Rev. A 76, 042329 (2007)
Niset, J., Cerf, N.J.: Tight bounds on the concurrence of quantum superpositions. Phys. Rev. A 76, 042328 (2007)
Ou, Y.C., Fan, H.: Bounds on negativity of superpositions. Phys. Rev. A 76, 022320 (2007)
Xiang, J.Y., Xiong, S.J., Hong, F.Y.: The bound of entanglement of superpositions with more than two components. Eur. Phys. J. D 47, 257 (2008)
Yu, C.S., Yi, X.X., Song, H.S.: Bounds on bipartitely shared entanglement reduced from superposed tripartite quantum states. Eur. Phys. J. D 49, 273 (2008)
Ma, K.H., Yu, C.S., Song, H.S.: A tight bound on negativity of superpositions. Eur. Phys. J. D 59, 317 (2010)
Akhtarshenas, S.J.: Concurrence of superpositions of many states. Phys. Rev. A 83, 042306 (2011)
Parashar, P., Rana, S.: Entanglement and discord of the superposition of Greenberger–Horne–Zeilinger states. Phys. Rev. A 83, 032301 (2011)
Bhar, A.: Peculiarities of bounds on states through the concept of linear superposition. J. Appl. Math. 2012, 1 (2012)
Bhar, A., Sen, A., Sarkar, D.: Character of superposed states under deterministic LOCC. Quantum Inf. Process. 12, 721 (2013)
Helstrom, C.W.: Quantum Detection and Estimation Theory. Academic Press, New York (1976)
Caves, C.M.: Quantum-mechanical noise in an interferometer. Phys. Rev. D 23, 1693 (1981)
Braunstein, S.L., Caves, C.M.: Statistical distance and the geometry of quantum states. Phys. Rev. Lett. 72, 3439 (1994)
Braunstein, S.L., Caves, C.M., Milburn, G.J.: Generalized uncertainty relations: theory, examples, and Lorentz invariance. Ann. Phys. 247, 135–173 (1996)
Giovannetti, V., Lloyd, S., Maccone, L.: Quantum-enhanced measurements: beating the standard quantum limit. Science 306, 1330 (2004)
Bollinger, J.J., Itano, W.M., Wineland, D.J., Heinzen, D.J.: Optimal frequency measurements with maximally correlated states. Phys. Rev. A 54, R4649(R) (1996)
Resch, K.J., Pregnell, K.L., Prevedel, R., Gilchrist, A., Pryde, G.J., O’Brien, J.L., White, A.G.: Time-reversal and super-resolving phase measurements. Phys. Rev. Lett. 98, 223601 (2007)
Dunningham, J.A., Burnett, K., Barnett, S.M.: Interferometry below the standard quantum limit with Bose–Einstein condensates. Phys. Rev. Lett. 89, 150401 (2002)
Giovannetti, V., Lloyd, S., Maccone, L.: Quantum metrology. Phys. Rev. Lett. 96, 010401 (2006)
Anisimov, P.M., Raterman, G.M., Chiruvelli, A., Plick, W.N., Huver, S.D., Lee, H., Dowling, J.P.: Quantum metrology with two-mode squeezed vacuum: parity detection beats the Heisenberg limit. Phys. Rev. Lett. 104, 103602 (2010)
Escher, B.M., Filho, R.L.D.M., Davidovich, L.: General framework for estimating the ultimate precision limit in noisy quantum-enhanced metrology. Nat. Phys. 7, 406 (2011)
Pezz, L., Smerzi, A.: Ultrasensitive two-mode interferometry with single-mode number squeezing. Phys. Rev. Lett. 110, 163604 (2013)
Liu, J., Lu, X.M., Sun, Z., Wang, X.G.: Quantum multiparameter metrology with generalized entangled coherent state. J. Phys. A Math. Theor. 49, 115302 (2016)
Huelga, S.F., Macchiavello, C., Pellizzari, T., Ekert, A.K., Plenio, M.B., Cirac, J.I.: Improvement of frequency standards with quantum entanglement. Phys. Rev. Lett. 79, 3865 (1997)
Chin, A.W., Huelga, S.F., Plenio, M.B.: Quantum metrology in non-Markovian environments. Phys. Rev. Lett. 109, 233601 (2012)
Pezże, L., Smerzi, A.: Entanglement, nonlinear dynamics, and the Heisenberg limit. Phys. Rev. Lett. 102, 100401 (2009)
Ma, J., Huang, Y.X., Wang, X., Sun, C.P.: Quantum Fisher information of the Greenberger–Horne–Zeilinger state in decoherence channels. Phys. Rev. A 84, 022302 (2011)
Sun, Z., Ma, J., Lu, X.M., Wang, X.: Fisher information in a quantum-critical environment. Phys. Rev. A 82, 022306 (2010)
Krischek, R., Schwemmer, C., Wieczorek, W., Weinfurter, H., Hyllus, P., Pezzé, L., Smerzi, A.: Useful multiparticle entanglement and sub-shot-noise sensitivity in experimental phase estimation. Phys. Rev. Lett. 107, 080504 (2011)
Strobel, H., Muessel, W., Linnemann, D., Zibold, T., Hume, D.B., Pezzé, L., Smerzi, A., Oberthaler, M.K.: Fisher information and entanglement of non-Gaussian spin states. Science 345, 424 (2014)
Berrada, K.: Non-Markovian effect on the precision of parameter estimation. Phys. Rev. A 88, 035806 (2013)
Tan, Q.S., Huang, Y., Yin, X., Kuang, L.M., Wang, X.: Enhancement of parameter-estimation precision in noisy systems by dynamical decoupling pulses. Phys. Rev. A 87, 032102 (2013)
Ostermann, L., Ritsch, H., Genes, C.: Protected state enhanced quantum metrology with interacting two-level ensembles. Phys. Rev. Lett. 111, 123601 (2013)
Dür, W., Skotiniotis, M., Fröwis, F., Kraus, B.: Improved quantum metrology using quantum error correction. Phys. Rev. Lett. 112, 080801 (2014)
Lu, X.M., Wang, X.G., Sun, C.P.: Quantum Fisher information flow and non-Markovian processes of open systems. Phys. Rev. A 82, 042103 (2010)
Chin, A.W., Huelga, S.F., Plenio, M.B.: Quantum metrology in non-Markovian environments. Phys. Rev. Lett. 109, 233601 (2012)
Sun, Z., Ma, J., Lu, X.M., Wang, X.G.: Fisher information in a quantum-critical environment. Phys. Rev. A 82, 022306 (2010)
Wu, S.X., Yu, C.S., Song, H.S.: Diffusion of \(CO_{2}\) in n-hexadecane determined from NMR relaxometry measurements. Phys. Lett. A 379, 1197 (2015)
Jin, G.R., Yang, W., Sun, C.P.: Quantum-enhanced microscopy with binary-outcome photon counting. Phys. Rev. A 95, 013835 (2017)
Müller, M.M., Gherardini, S., Smerzi, A., Caruso, F.: Fisher information from stochastic quantum measurements. Phys. Rev. A 94, 042322 (2016)
Fröwis, F., Sekatski, P., Dür, W.: Detecting large quantum Fisher information with finite measurement precision. Phys. Rev. Lett. 116, 090801 (2016)
Rivas, À., Luis, A.: Precision quantum metrology and nonclassicality in linear and nonlinear detection schemes. Phys. Rev. Lett. 105, 010403 (2010)
Chaves, R., Brask, J.B., Markiewicz, M., Kołodyński, J., Acìn, A.: Noisy metrology beyond the standard quantum limit. Phys. Rev. Lett. 111, 120401 (2013)
Sanders, B.C., Milbum, G.J.: Optimal quantum measurements for phase estimation. Phys. Rev. Lett. 75, 2944 (1995)
Boixo, S., Datta, A., Davis, M.J., Flammia, S.T., Shaji, A., Caves, C.M.: Quantum metrology: dynamics versus entanglement. Phys. Rev. Lett. 101, 040403 (2008)
Joo, J., Munro, W.J., Spiller, T.P.: Quantum metrology with entangled coherent states. Phys. Rev. Lett. 107, 083601 (2011)
Gammelmark, S., Mølmer, K.: Fisher information and the quantum cramér-rao sensitivity limit of continuous measurements. Phys. Rev. Lett. 112, 170401 (2014)
Dorner, U., Demkowicz-Dobrzanski, R., Smith, B.J., Lundeen, J.S., Wasilewski, W., Banaszek, K., Walmsley, I.A.: Optimal quantum phase estimation. Phys. Rev. Lett. 102, 040403 (2009)
Nielsen, M.A., Chuang, I.L.: Quantum Computation and Quantum Information. Cambridge University, Cambridge (2010)
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This work was supported by the National Natural Science Foundation of China, under Grant Nos. 11775040 and 11375036, and the Fundamental Research Fund for the Central Universities under Grant No. DUT18LK45.
Rights and permissions
About this article

Cite this article
Shao, Tt., Li, Dm. & Yu, Cs. The bounds of Fisher information induced by the superposed input states. Quantum Inf Process 19, 11 (2020). https://doi.org/10.1007/s11128-019-2505-1
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11128-019-2505-1