
Abstract
The agricultural industry is increasingly reliant upon the development of technologies that employ real-time monitoring of machine performance to generate pertinent information for machine operators, owners, and managers. Yield mapping in particular is an important component of implementing precision agricultural practices and assessing spatial variability. In an attempt to generate yield maps in sugarcane, this research estimated yield in the field based on GPS data from harvesters, tractors and semi-trucks. The method was based on identifying “fill events”, which represent a distance through which the tractor/wagon combination traveled in parallel with the harvester, indicating that the wagon was being filled. Each wagon was filled to approximately 10 Mg of sugarcane, which was divided by the fill event distance and row width to determine the yield in Mg ha−1. A total of 76 fill events were observed from a 7.1 ha harvested area. Based on the estimated yield per fill event, a rudimentary yield map was developed, which was expanded into a generalized yield map for the 7.1 ha harvested area.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Mapping of yield mass per area in Mg ha−1 is one of the foundations for precision farming-based decisions in most agricultural industries. The ability to quantify yield variability in a field, coupled with soil data, field location, the application of fertilizer and other inputs, allows a farmer to identify and respond to variations in yield (Birrell et al. 1996; Roel and Plant 2004; Simmonds et al. 2013). Yield monitors typically measure yield mass indirectly by employing a proxy characteristic such as material impact, pressure, volume, or a series of machine or crop characteristics. To produce a yield map, the data are geo-referenced using GPS (Palaniswami et al. 2011). Yield maps can be produced using a yield monitor embedded in the harvester or by analyzing remotely sensed imagery (Birrell et al. 1996; Noureldin et al. 2013; Roel and Plant 2004). A drawback of machine-embedded, real-time yield monitoring systems is their reliance upon calibration and maintenance. Yield maps from imagery, on the other hand, can be inexpensive and easier to produce than those from machine embedded yield monitors, yet at a farm and block level, their limited accuracy and precision can be problematic (Bramley et al. 2015).
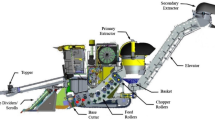
Proper sugarcane production relies on the delivery to a mill of fresh cane, which has been cut close to the ground and is free of trash, tops, sheaths, soil, and rocks. Harvesting methods vary among operations due to the wide range of topographical and climatic conditions spanning the globe. Although a sugarcane harvester is a complex machine, requiring a high level of skill and expertise for operation, the chopper harvester is being used in over 20 countries due to its ability to harvest both burnt and green sugarcane, erect or lodged, with yields exceeding 150 Mg ha−1 (Meyer et al. 2011). The cultivated area for sugarcane is expected to increase from 7 million ha in 2008 to 14 million ha in 2030. To move the industry toward long-term sustainability, taking into account the projected increase in farmed area, the sugarcane production system as a whole needs improvement (Braunbeck and Magalhães 2014). For instance, sugarcane yield can be increased by improving the harvesting process, allowing for better regrowth from ratoons (Momin et al. 2017). Harvesting expenditure can be brought down by increasing material throughput, field capacity and field efficiency, while reducing the difficulty of operating machinery through sensing and automation. Currently, most sugarcane growers merely receive daily mill reports that contain information derived from cane core samples such as sugar and trash content, as well as the sugarcane mass delivered. They use these rudimentary data to identify problems in their fields, but with limited accuracy; sugarcane mass in a truck is an aggregate from yield originating from portions of the field, and since no geo-referencing is available, it can only be used to determine the average yield of a field, eliminating the ability to pinpoint problem areas. Yield mapping on the other hand, can deliver quantitative information at a higher spatial density.
By addressing problem areas in a field, identified through yield maps, productivity can be increased in areas with high yield potential and profitability maximized in areas where productivity is unlikely to increase (Bramley et al. 2015). Adoption of current precision agriculture (PA) technologies has already led to higher yields, reduced costs, reduced environmental impact, and improvements in sugarcane quality (Silva et al. 2011). However, to put the industry on a path of long-term sustainable growth, continued adoption of new PA techniques will be key to the profitability of the sugarcane enterprise (Bramley et al. 2015).
According to Bramley (2009), one of the earliest studies of sugar yield variability within a sugarcane field was conducted by Kingston and Hyde (1995). Hand samples of commercial cane sugar values were collected at 73 sites within an 8.8 ha field. The measurements showed significant variation ranging up to 6.6 “units” (a measure of sugarcane quality), highlighting the potential of employing site-specific crop management (SSCM) principles. To justify the precision agriculture approach in sugarcane fields in Louisiana, Johnson and Richard (2005) investigated the extent of temporal and spatial variability of yield and quality in relation to soil properties. They observed a high degree of variability and spatial correlation in both soil properties as well as sugar yield and quality in two locations. Some of the earliest yield monitors for sugarcane were developed by the National Centre for Engineering in Agriculture (NCEA) in Australia. Direct (mass sensing and volume measurement) and indirect (measurement of power consumption) techniques were field tested (Cox et al. 1999). Several other researchers developed similar systems using this approach including Pagnano and Magalhães (2001) who incorporated accelerometers to filter error inducing frequencies from the harvester. The system showed significant errors ranging from 8.7 to 26.7%. Jensen et al. (2010), evaluated the performance of three commercially available yield monitoring systems. They reported that none of these performed well enough to serve as a commercial sugarcane yield monitor, requiring further refinement and development.
In 2002, a weighing system was tested (Benjamin 2002) and it was concluded that the system was not ready for market, since it suffered from errors ranging from zero to 33%, and averaging 11.05%. Mailander et al. (2010) designed a weighing system for measuring the yield of sugarcane; this system resulted in an overall average error of 11%. Molin and Engineer (2004) investigated a similar weighing approach, but the test results were inconsistent with an average error of − 3.5% to 8.3%. A mass flow sensor based sugarcane yield monitor and a yield map generated from 43 ha fields tests showed that the system performed well with mean and maximum errors of 4.3% and 6.4% respectively (Magalhães and Cerri 2007). An approach that used three optical sensors placed in the flooring of the conveyer was developed as well (Price et al. 2007). Fields tests indicated that this system showed crop variances and matched overall yield amounts from one field with an error of 6.2%. Price et al. (2011) developed a fiber optic yield monitoring system that measured the volume of sugarcane moving through the combine to estimate yield. The monitoring system worked well under dry field condition with an average yield error of 7.5%. However, problems occurred when the system was used in wet, muddy, or fields with high clay content. Here, the sensors became clogged, which caused a loss of 75% of the readings. To overcome this challenge, Price et al. (2017) developed an alternative optical yield monitoring system where sensors were mounted above the loading elevator. However, there was still a possibility of over-prediction due to piling up of sugarcane leaves and debris on the top side of the billets. An approach where the yield was estimated by measuring stem-bending force was tested on a John Deere 3522 sugarcane harvester (Mathanker et al. 2015). Here, load cells were fitted between two parallel pipes forming a push bar that was installed between the harvester’s crop dividers, which are hydraulically driven conical screw conveyors that maintain a vertical cane orientation and gently feed cane into the harvester throat. The system showed strong correlations between forces on the push bar and yield while harvesting napier grass but it could not withstand the large impact forces encountered during the harvest of sugarcane and energycane. Another patented sugarcane yield monitoring concept uses a torsion deflection plate at the outlet of the elevator to determine the force of billets being thrown into the wagon, similar to the impact plate concept found in grain harvesters (Wendte et al. 2001). In addition, yield monitors have been explored that employ pressure fluctuations within either the roller opening, chopper, or elevator (Bramley et al. 2015). It must be noted that all yield monitors mentioned here were developed for research purposes; few are available commercially, and the adoption rate by industry is low, mainly because of a lack of accuracy. In addition, growers demand a simple system that requires minimal calibration and maintenance, which current prototypes lack.
The objective of this study was to develop a yield mapping system for sugarcane, based on GPS tracking of vehicles, which is readily adoptable by a wide cross-section of the industry.
Materials and methods
Field testing was conducted in unburnt sugarcane (variety: Ho CP 96-540) in its second ratoon at farm sites located close to Edgard, Louisiana (Fig. 1). The south-west corner of the experiment area, which was rectangular in shape, was located at lat, lon: 30.030144, − 90.577571. The experimental area had an east–west length of 90 m and a north–south length of 855 m. The row length and width of the experimental area was 838.2 m and 1.8 m respectively. GPS data were recorded during sugarcane harvest on November 22nd, 2016 in a field with a size of approximately 7.6 ha, where a total of 51 rows were covered.

Source Google Earth, 2017
Rectangular experiment site in Edgard, Louisiana used for sugarcane harvesting
Harvesting front
In Louisiana, a typical sugarcane harvesting operation, also known as a “harvesting front”, consists of one or two mechanical harvesters, a series of tractors pulling high dump wagons with a load capacity between 6 and 12 Mg, and a fleet of semi-trucks. Wagons are loaded by the harvester and then driven to a transloading site which is typically located at the corner of a field or on a wide haul road (Fig. 1). The transloading site can be as far as 1.5 km from the field being harvested although it is typically much closer. The high dump wagons unload directly into a semi-truck. A semi-truck has a capacity of 30 Mg, equal to approximately three wagon loads. Semi-trucks then travel to the sugar mill, which can be up to 50 km away. On arrival, each truck is weighed and pulled into an unloading dock where a fixed crane unloads it. Some trucks are sent to a core sampler where the cane is evaluated for sugar and trash content, which determines the payment per Mg. Although load regulations are common in the United States, they vary by region. For instance, in Louisiana, the weight limit of trucks is set at 30 Mg to prevent road damage. This limit is enforced by the mill, which does not pay for any material in excess of 30 Mg and marks the overload event on the daily mill report card. The field operation near Edgard, Louisiana consisted of one sugarcane harvester (Fig. 2a), five tractors pulling high dump sugarcane wagons with a capacity of 10 Mg, (Fig. 2b), and eight semi-trucks (Fig. 2c). The average operating speed of the harvester was 6.2 km h−1.

Harvesting green sugarcane near Edgard, Louisiana. a John Deere 3520 sugarcane harvester, b tractor pulling 10 Mg high dump sugarcane wagon, and c loaded semi-truck en route to the sugar mill (Color figure online)
Harvesting front analysis for yield mapping and machine productivity assessment
Throughout the harvesting process, the sugarcane harvester continuously interacts with an unloading tractor/wagon combination, as it has minimal on-board storage. Once a wagon is filled, the tractor operator drives to a transloading site to unload into a semi-truck. From there, the truck heads to the mill, unloads, and makes the return trip. By monitoring these machine interactions, productivity can be assessed along with estimates for yield per area.
GPS data loggers
GPS units (model Tracking Key 2, Land Air Sea, Woodstock, IL) were used to log the movements of the harvester, tractors, and one semi-truck during harvest (Fig. 3). These low-cost, easy-to-use units, employ the National Marine Electronics Association (NMEA) communication protocol and have the ability to communicate with 16 satellites simultaneously. They have a horizontal accuracy of 2.5 m with an update rate of 1 s. The units were mounted on top of each vehicle using a magnet integral to the device’s housing. The data recorded by the unit can be viewed as a text report, overlaid with a digital street map, or displayed over a satellite image on Google Earth without post processing. After harvesting was completed for the day, data from each unit were downloaded to a laptop on site, batteries were replaced, and memories cleared. Each unit provided an LAS file type, which is an industry standard file type for recording GPS and LIDAR point data (ASPRS 2008). Each unit supplied time information, speed, heading, elevation, and latitude–longitude coordinates. Data were first imported into the Land Air Sea web-based software powered by Google Maps, which visualizes the machine’s paths but was unable to overlay multiple sets of data. Using Google Maps software, data were exported in a CSV text format, readable by Microsoft Excel, the latter which also facilitated data analysis.

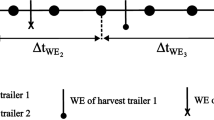
Sugarcane harvesting and fill operations (a). Visualization of a fill event (b)
Yield mapping logic
For each fill event, the locations of the harvester were recorded. It was assumed that when both the harvester and tractor were traveling in parallel, AND the harvester was within a 10 m radius of the tractor for a prolonged duration, the harvester was filling the wagon (Fig. 3a). The radius of 10 m was based on the machine dimensions of the 3520 harvester. Once the wagon was filled with approximately 10 Mg of sugarcane it then traveled to the transloading site where the sugarcane was offloaded into a semi-truck. Figure 3b shows a visualization of a fill event and the event radius surrounding the harvester.
An offloading event was identified when a tractor entered the transloading site, which was marked with an 18 m radius from the center of the site located at lat, lon: 30.03774861, − 90.57744583 (Fig. 1). This radius was selected to help identify different fill events. For instance, if the tractor exited the fill event radius (Fig. 3b) and returned to the harvester without traveling to the transloading site, this would be erroneously considered a fill event. The most prominent of these situations was during turning at the end of a row, which required the tractor to travel on the headland for a short distance (Fig. 4a), while the harvester rotates 180° (Fig. 4b) and enters the next row (Fig. 4c). Subsequently, the tractor had to back up and enter the field along the third row inland from the harvester. Although not performed in this study, machine productivity assessment could be conducted by measuring time differences between fill events, transloading wait times, and travel times of the harvest front to the transloading location.

Tractor and harvester turning procedure: a The tractor is exiting the row and traveling on the headland, b the harvester is completing a 180° turn, where the rotational direction of the topper blades is reversed and the elevator is rotated to the opposite side of the harvester, c the follower tractor approaches the harvester, d the harvester waits for tractor to enter the row and initiate filling the wagon
Data processing for yield mapping
To process data for mapping estimated yields, a collection of test repetitions were analyzed using QGIS (version: 2.18.4), a geographic information system (GIS). An algorithm created a new layer with the same features as the input layer, but with geometries re-projected to WGS84 UTM zone 15N CRS. Subsequently, point-to-point distances were calculated to identify the closest tractor to the harvester using Pythagorean mathematics. If the distance between the harvester and tractor was 10 m or less, that tractor was identified as the nearest, and therefore, the harvester was filling sugarcane into the wagon. Based on this condition, the interaction distance (i.e., fill event distance through which the harvester and tractor traveled in parallel) was calculated for each specific tractor at a specific time. Point shapefiles were then created, which included each point representing the distance between the harvester and each tractor, the closest tractor and the fill events. However, due to the turning procedure shown in Fig. 4c sometimes it was observed that a fill event related to an existing wagon was interrupted and the follower tractor was the closest to the harvester for a short period. After completing the turning procedure, the current tractor then resumed being the closest to the harvester and the fill event continued. To manage such interruptions for measuring the fill event of the existing tractor, a filter was applied based on average fill event length while discarding the significantly shorter fill event length associated with the following tractor. Once all fill events and their corresponding travel distances were identified, a yield (Mg ha−1) for each fill event was determined using the following equation:
where, Y in Mg ha−1 is the yield, Wc in Mg is the wagon capacity (10 Mg), Dfe in m is the fill event (interaction) distance, W in m is the row width (1.8 m), and the constant 10 000 is the conversion factor from m2 to ha.
One full wagon filled with 10 Mg of sugarcane was assumed to be harvested during the fill event distance. To observe a yield consistency pattern, the yield point shapefile data of each fill event were interpolated to a fixed 1.0 × 1.0 m grid using an inverse distance weighting (IDW) interpolation method. Interpolation is a process that creates a grid or contour yield map, converts the point yield data into a continuous surface of estimated yield values, and eliminates erroneous values caused by mall patches with extremely low or high yields that are not closely related to immediate neighbors (Ping and Dobermann 2005; Luck and Fulton 2015). Here, sample points were weighted during interpolation such that the influence of one point relative to another declines with distance from the value of a target variable at some new location (Mitas and Mitasova 1999; QGIS 2017). To ensure unbiased interpolation, the weighing coefficient was considered as unity (Hengl 2009). Finally, a cluster map was developed from the interpolated map to classify sugarcane yield for the harvested field based on sugarcane production. Figure 5 shows the development of the yield map from the GPS information in a flow chart.

Flow chart for creating yield map
Results
The Tracking Key 2 GPS loggers did provide a cost effective means of collecting data to identify fill events of each wagon and develop yield mapping logic. The total number of fill events observed was 76. Table 1 shows that for each tractor, the total distances traveled were similar, implying that the average length of each 10 Mg fill event was approximately 515 m throughout the harvest. Therefore, longer and shorter fill event lengths (e.g., 515 ± 52 m) associated with increased and decreased harvesting time indicate lower and higher yielding sugarcane production areas.
Figure 6a shows the estimated fill events associated with tractor 1. These geographical data were collected for each tractor and then overlaid with machine movement information as shown in Fig. 6b. Figure 6 shows that the travel paths of each tractor during harvesting operations were accurately identified. Although the current machine state data was used for yield mapping, in the future they could also be used for logistic systems analysis and optimization. Based on the analysis of the GPS data, the total harvesting area covered by all the tractors was found to be 7.1 ha, which is close to the actual harvested field area 7.6 ha. However, from the travel paths shown in Fig. 6, it can be seen that sometimes the harvester GPS location jumped from one to two rows away from its actual path. This occurred due to inaccuracy of the GPS device; each unit had a horizontal accuracy of approximately 2.5 m and when considering multiple units this error could reach up to 5 m. When determining the fill event distance this error could have a significant effect on the accuracy of the fill event distance measurement. In an attempt to overcome this potential error source, only the beginning and end of the fill event were considered during determination of the travel path. This approach was followed to filter instances of turning and any instances of locational error exceeding the event radius of 10 m.

Example of fill events associated with tractor 1 (a) and all tractors (b)
The yield estimate map for each event of tractor 1 and all five tractors combined is shown in Fig. 7a and b respectively. The fill event distances traveled by the tractors were used to determine the yield per event, where a path color was assigned for yield mapping. It can be seen that the sugarcane yield varied at the location of each event path among all tractors. The estimated yields observed for all 76 fill events are shown in Table 2. The general yield trends were identical for all tractors, being on average approximately 110 Mg ha−1 for each tractor. Based on the wagon capacity of 10 Mg and 76 fill events, the estimated yield was 760 Mg from a 7.1 ha harvested area or 107.0 Mg ha−1. As a comparison, the Lafourche Sugars LLC, Edgard Farms mill reported an actual yield of 833.65 Mg from a 7.6 ha harvested area or 109.7 Mg ha−1, which indicates the prima facie utility of the method.

Example of estimated yield maps associated with tractor 1 (a) and all tractors (b)
Figure 8a shows the generalized yield map of the harvested field of 7.1 ha, interpolated to a one meter grid. Low and high yielding regions were observed with a maximum variation of approximately 10 Mg ha−1. The harvested area was further classified into high and low yielding zones shown in Fig. 8b. The average yields of low and high production zones were 103 ± 9.5 Mg ha−1 and 113 ± 10.5 Mg ha−1 respectively with 9% coefficient of variation in both cases.

Sugarcane yield map of 7.5 ha land (a interpolated map, b clustered map)
Discussion
One of the obvious limitations of the study lies in the limited accuracy of the field event length measurements due to standard accuracy GPS units; using RTK-GPS would without a doubt increase the accuracy. Another source of error lies in the assumption that all wagons were fully loaded to 10 Mg, which was based on human observation. It is not uncommon, even for experienced sugarcane growers, to overload the first few wagons from a new tract. The weights will also be affected by variety and harvest conditions (Price et al. 2011). Fitting all wagons with load cells would dramatically increase the accuracy of the yield maps, but most likely, at prohibitive costs. Taking into account mentioned errors, the yield maps presented in this study are by no means ready for commercial application; yet, this first attempt to produce yield maps based on machine locations holds merit, since before this study, minimal research in monitoring machine interactions of a sugarcane harvesting front had been conducted.
The data as collecting in this study can serve more purposes than yield monitoring alone, as they can be used to evaluate machine productivity as well. Tracking harvesting machinery performance in real time can provide feedback to operators and managers for maximizing productivity and operational efficiency. This is essential, as it is not uncommon for harvesters to idle for 30–50% of their operation time. The method as shown could be used to analyze overall logistics and machine productivity, such as transloading times, cutting times, harvester turning time, stoppage time and lag time. Furthermore, the locations of high soil compaction zones could be determined by studying machine traffic patterns in certain areas of the field. The yield map could also use to understand the influence of soil attributes on yield, and to identify soil management zones. Yield prediction data within each management zone could be used to optimize the application of fertilizers and pesticides. All of these benefits can be achieved by outfitting a complete harvesting front with GPS receivers, and creative data analytics.
Conclusions
This study developed a sugarcane yield mapping system based on GPS tracking of all machines involved in a harvesting operation. A fill event was defined as the time/space during which the harvester and a tractor/wagon combination were traveling in parallel AND within a distance of 10 m of each other. Based on identified fill events, logic was developed to produce yield maps. A total of 76 fill events were identified for five tractors within a 7.1 ha harvested area and the average length of distance travelled was found to be approximately 515 m for each event. Yield was calculated for each fill event and used to develop a yield map.
The average yield from the 7.1 ha experimental area was estimated as 107 Mg ha−1 for each tractor, whereas the sugar mill reported 109.7 Mg ha−1 from the same area. The generated yield map was divided into high and low yielding regions and the maximum variation was observed approximately 10 Mg ha−1. The method could be improved by using high-accuracy GPS data, and a better estimation of the wagon fill level.
References
ASPRS. (2008). Las specification, V-1.2, the imaging and geospatial information society. http://www.asprs.org/wp-content/uploads/2010/12/asprs_las_format_v12.pdf.
Benjamin, C. (2002). Sugar cane yield monitoring system. Baton Rouge: The Department of Biological and Agricultural Engineering, Louisiana State University.
Birrell, S. J., Sudduth, K. A., & Borgelt, S. C. (1996). Comparison of sensors and techniques for crop yield mapping. Computers and Electronics in Agriculture, 14(2–3), 215–233. https://doi.org/10.1016/0168-1699(95)00049-6.
Bramley, R. G. V. (2009). Lessons from nearly 20 years of precision agriculture research, development, and adoption as a guide to its appropriate application. Crop and Pasture Science, 60(3), 197–217. https://doi.org/10.1071/CP08304.
Bramley, R., Deguara, P., Granshaw, B., Jensen, T., Lillford, L., McGillivray, J., et al. (2015). Precision agriculture for the sugarcane industry. Indooroopilly: Sugar Research.
Braunbeck, O. A., & Magalhães, P. S. G. (2014). Technological evaluation of sugarcane mechanization. Sugarcane bioethanol—R&D for Productivity and Sustainability, 1, 451–464.
Cox, G., Harris, H., & Cox, D. (1999). Application of precision agriculture to sugar cane. Precision Agriculture, 4a, 753–765.
Hengl, T. (2009). A practical guide to geostatistical mapping (2nd ed.). Luxembourg: Office for Official Publications of the European Communities.
Jensen, T., Baillie, C., Bramley, R., Di Bella, L., Whiteing, C., & Davis, R. (2010). Assessment of sugarcane yield monitoring technology for precision agriculture. In 32nd Annual Conference of the Australian Society of Sugar Cane Technologists (ASSCT 2010). Bundaberg, Australia. http://www.assct.com.au/assct_main.php?page_id=0.
Johnson, R. M., & Richard, E. P. (2005). Sugarcane yield, sugarcane quality, and soil variability in Louisiana. Agronomy Journal, 97(3), 760–771. https://doi.org/10.2134/agronj2004.0184.
Kingston, G., & Hyde, B. T. (1995). Intra-field variation of commercial cane sugar (CCS) values. In Proceedings of the Australian Society of Sugarcane Technologists (pp. 30–38).
Luck, J. D., & Fulton, J. P. (2015). Improving yield map quality by reducing errors through yield data file post-processing. Lincoln, NE: Institute of Agriculture and Natural Resources University of Nebraska-Lincoln Extension.
Magalhães, P. S. G., & Cerri, D. G. P. (2007). Yield monitoring of sugar cane. Biosystems Engineering, 96(1), 1–6. https://doi.org/10.1016/j.biosystemseng.2006.10.002.
Mailander, M., Benjamin, C., Price, R., & Hall, S. (2010). Sugar cane yield monitoring system. Applied Engineering in Agriculture, 26(2001), 965–970.
Mathanker, S. K., Buss, J. C., Gan, H., Larsen, J. F., & Hansen, A. C. (2015). Stem bending force and hydraulic system pressure sensing for predicting napiergrass yield during harvesting. Computers and Electronics in Agriculture, 111, 174–178. https://doi.org/10.1016/j.compag.2015.01.007.
Meyer, J., Rein, P., Turner, P., Mathias, K., & McGregor, C. (2011). Good management practices manual for the cane sugar industry (final). Washington, DC: The International Finance Corporation.
Mitas, L., & Mitasova, H. (1999). Spatial interpolation. In P. Longley, M. F. Goodchild, D. J. Maguire, & D. W. Rhind (Eds.), Geographical information systems: Principles, techniques, management and applications. (pp. 481–492). New York: Wiley. http://skagit.meas.ncsu.edu/~helena/gmslab/papers/hgint39.pdf.
Molin, J. P., & Engineer, A. (2004). Field-testing of a sugar cane yield monitor in Brazil. In ASAE/CSAE Annual International Meeting (Vol. 0300, p. 12). https://doi.org/10.13031/2013.16159.
Momin, M. A., Wempe, P. A., Grift, T. E., & Hansen, A. C. (2017). Effects of four base cutter blade designs on sugarcane stem cut quality. Transactions of the ASABE, 60(5), 1551–1560.
Noureldin, N. A., Aboelghar, M. A., Saudy, H. S., & Ali, A. M. (2013). Rice yield forecasting models using satellite imagery in Egypt. The Egyptian Journal of Remote Sensing and Space Science, 16(1), 125–131. https://doi.org/10.1016/j.ejrs.2013.04.005.
Pagnano, N. B., & Magalhães, P. S. G. (2001). Sugarcane yield measurement. In Proceedings of 3rd European Conference on Precision Agriculture, France.
Palaniswami, C., Gopalasundaram, P., & Bhaskaran, A. (2011). Application of GPS and GIS in sugarcane agriculture. Sugar Tech, 13(4), 360–365. https://doi.org/10.1007/s12355-011-0098-9.
Ping, J. L., & Dobermann, A. (2005). Processing of yield map data. Precision Agriculture, 6(2), 193–212. https://doi.org/10.1007/s11119-005-1035-2.
Price, R. R., Johnson, R. M., & Viator, R. P. (2017). An overhead optical yield monitor for a sugarcane harvester based on two optical distance sensors mounted above the loading elevator. Applied Engineering in Agriculture, 33(5), 687–693.
Price, R. R., Johnson, R. M., Viator, R. P., Larsen, J., & Peters, A. (2011). Fiber optic yield monitor for a sugarcane harvester. Transactions of the ASABE, 54(2007), 31–39.
Price, R. R., Larsen, J., & Peters, A. (2007). Development of an optical yield monitor for sugar cane harvesting. ASABE Annual International Meeting, 0300(07), 27. https://doi.org/10.13031/2013.23546.
QGIS. (2017). QGIS user guide: Release 2.14. https://docs.qgis.org/2.14/pdf/en/QGIS-2.14-UserGuide-en.pdf.
Roel, A., & Plant, R. (2004). Spatiotemporal analysis of rice yield variability in two california fields. Agronomy Journal, 96(1), 77–90. https://doi.org/10.2134/agronj2004.1481.
Silva, C. B., de Moraes, M. A. F. D., & Molin, J. P. (2011). Adoption and use of precision agriculture technologies in the sugarcane industry of São Paulo state, Brazil. Precision Agriculture, 12(1), 67–81. https://doi.org/10.1007/s11119-009-9155-8.
Simmonds, M. B., Plant, R. E., Peña-Barragán, J. M., van Kessel, C., Hill, J., & Linquist, B. A. (2013). Underlying causes of yield spatial variability and potential for precision management in rice systems. Precision Agriculture, 14(5), 512–540. https://doi.org/10.1007/s11119-013-9313-x.
Wendte, K. W., Skotnikov, A., Ridge, B., Thomas, K. K., & Park, O. (2001). Sugarcane yield monitor. US Patent No. 6,272,819 B1.
Acknowledgements
This project was funded by the Energy Biosciences Institute, University of Illinois at Urbana-Champaign. The authors would like to thank Mr. Brandon Gravois from Edgard, LA for his support in conducting the field experiments on his farm.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Momin, M.A., Grift, T.E., Valente, D.S. et al. Sugarcane yield mapping based on vehicle tracking. Precision Agric 20, 896–910 (2019). https://doi.org/10.1007/s11119-018-9621-2
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11119-018-9621-2