
Abstract
This article reveals the different types of optical solitons of non-linear coupled Riemann wave equation and Wazwaz Kaur Boussinesq equation. We adopted a direct integration technique namely, modified \(\left( \frac{G^{\prime }}{G^2}\right)\)-expansion. Different sorts of soliton’s existence criteria are also presented here. The proposed technique provides the new travelling wave solutions with the aid of different types of derivatives such as beta derivative, M-Truncated derivative and Conformable derivative and also offers special kinds of solutions including rational, trigonometric and hyperbolic solutions. In this work, we compared and analysed solitary wave solutions obtained by using different types of fractional derivatives. The outcomes of the study are highly significant for modern communication network technology, optical fiber, ion-acoustic, magneto-sound waves in plasma, and stationary media, particularly in the propagation of tidal and tsunami waves.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Non-linear partial differential equations with fractional components play an important role in describing non-linear processes in science and engineering. It is necessary to obtain an exact solution of the differential equations in order to recognise the non-linearities. This encourages researchers to explore acceptable methods for determining the exact solutions of linear and non-linear differential equations. Indeed, there has been a growing interest in fractional calculus and partial fractional differential equations (PFDEs) in recent years. Fractional calculus extends the traditional concept of differentiation and integration to non-integer orders, allowing for the analysis of systems and phenomena with memory and long-range dependencies. Fractional models and fractional differential equations have found applications in various fields, including physics, engineering, finance, biology, modeling complex systems, control systems, electrochemical processes, viscoelasticity, mechanics and vibrations and many others (Wazwaz 2010; Kopçasız et al. 2022; Yong et al. 2011; Suret et al. 2020; Shakeel et al. 2023a, b; Losseva et al. 2012; Raza et al. 2021; Arshed et al. 2022).
Fractional calculus is indeed a generalization of classical calculus that deals with non-integer orders of differentiation and integration. This generalization provides a powerful framework for analyzing and modelling systems and phenomena that exhibit memory, long-range dependencies, and non-local behaviors. In fractional calculus, the concept of a fractional derivative (or integral) is extended to include non-integer orders, such as fractional or even complex orders. This allows for the development of new mathematical formulas that are specifically designed to handle fractional differential equations. These equations involve fractional derivatives, and they can describe various processes that don’t adhere to classical integer-order behaviors. A number of researches have been done in the recent past in which the behaviour of PFDEs and their solutions have been found such as, soliton solutions to the space-time-fractional telegraph equation (Arefin et al. 2022), time fractional Klein–Gordon equation (Sadiya et al. 2022), fractional-order Phi-4 equation and Allen–Cahn equation (Zaman et al. 2022), fractional simplified Camassa–Holm equation (Khatun et al. 2022), fractional-coupled Burgers equation (Khatun et al. 2022), fractional order nonlinear coupled type Boussinesq equation (Zaman et al. 2023), space-time fractional Camassa–Holm equation (Arefin et al. 2023) and fractional space-time advection-dispersion equation (Aljahdaly et al. 2022) etc.
The use of fractional derivatives to describe memory and hereditary properties has found numerous applications in various materials and processes, including polymers. Polymers are complex materials with intricate molecular structures, and their behaviors often exhibit non-local effects, memory, and time-dependent responses that can be effectively described using fractional calculus. In the past few years, the researchers have used some derivatives that have fractional order such as Atangana beta and conformable derivatives (Qureshi et al. 2021), Caputo fractional derivative (Almeida 2017; Singh et al. 2023; Abdulazeez and Modanli 2023), \(\psi\)-Hilfer fractional derivative (Sousa and De Oliveira 2018), fractional Grünwald–Letnikov derivative (Ortigueira and Machado 2015), Riemann–Liouville definition of fractional derivative (Atangana and Gómez-Aguilar 2018), k-Riemann–Liouville derivative (Romero et al. 2013), Modified Riemann–Liouville derivative (Jumarie 2006), Atangana–Baleanu derivative (Atangana and Koca 2016) and Caputo–Liouville generalized fractional derivative (Sene 2020).
Finding exact solutions for FPDEs is a significant and challenging area of research while finding exact solutions to fractional PDEs is often challenging due to their inherent complexity. Various techniques have been proposed to address the challenges of solving FPDEs such as modified double sub-equation method (Yépez-Martínez and Rezazadeh 2022), generalized new Auxiliary equation approach (Zhang 2007), Modified E-Function technique (Attaullah et al. 2022), new generalized exponential rational function method (Ghanbari and Inc 2018), modified exponential function method (Muhamad et al. 2023), \((\frac{G^{{\prime }}}{G})\)-expansion technique (Zafar et al. 2023; Bibi et al. 2023), the \((\frac{G^{\prime }}{G^2},\frac{1}{G})\)-expansion method (Mamun Miah et al. 2017), Kurchatov’s method (Ezquerro et al. 2013), sine-cosine method (Taşcan and Bekir 2009), the new exponential-expansion scheme (Jaradat and Alquran 2022), right-left-moving wave solutions of two non-linear PDEs (Jaradat et al. 2018), the extended tanh-coth expansion method and the polynomial-function technique (Alquran et al. 2021), the modified exponential-expansion algorithm (Jaradat and Alquran 2022), Kudryashov expansion method and simplified bilinear method (Jaradat and Alquran 2020), modified rational sine-cosine functions (Alquran and Jaradat 2023) and the extended transformed rational function technique (Jannat et al. 2022) and many more (Khatun et al. 2023, Shakeel et al. (2023c)). These methods involve breaking down the original equation into simpler sub-equations or modified versions of them, which can then be solved more easily.
Moreover, in the present study, we will use the \((\frac{G^{\prime }}{G^2})\)-expansion technique (Arshed et al. 2018) for the exact optical soliton solution. Additionally, \(\left( \frac{w}{g}\right)\)-expansion technique detailed to discuss in the research paper (Wen-An et al. 2009), where w, g are the functions that completely fulfil the requirements of the following equation,
where \(\Lambda\) and \(\varUpsilon\) are the arbitrary constants. The latter technique introduces the generic solutions to Eq. (1.1) and finds the explicit formulas for evaluating the solutions of precise non-linear evolution problems (NEPs). The extended \(\left( \frac{w}{g}\right)\)-expansion approach (Gepreel 2016) is taken to be considered in this investigation, where w, g are the functions that completely fulfil the requirements of the following equation
if \(\upsilon \ne 0\) and we take \(w=(\frac{G^{\prime }}{G})\) and \(g=G\), then we have
this change produces numerous new and exact travelling wave solutions to particular NEPs with the free parameters \(\upsilon , \varUpsilon\) and \(\Lambda\). To see the research papers (Aljahdaly 2019; Al-Harbi et al. 2023) for the detailed discussion about modified \((\frac{G^{\prime }}{G^2})\)-expansion technique. This method offers exact solutions for a broad array of fractional differential equations. In our current study, we apply the modified \((\frac{G^{\prime }}{G^2})\)-expansion technique, aided by the \(\beta\)-D (Yusuf et al. 2019; Atangana and Doungmo Goufo 2014), M-TD (Hussain et al. 2020) and C-D (Alharbi et al. 2019) to explore the novel soliton solutions for the NLCRW equation (Ansar et al. 2023) and NLWKB equation (Silambarasan and Nisar 2023). In this research work, we explored the three fractional order derivatives for the purpose of analysing the effective solutions of the non-linear coupled Riemann wave equation and Wazwaz Kaur Boussinesq equation. \(\beta\)-D extends the concept of fractional derivatives by introducing parameters \(\alpha\) and \(\beta\) from the beta function. This derivative allows for greater flexibility compared to conventional fractional derivatives like Riemann–Liouville or Caputo derivatives. It’s worth noting that the fractional \(\beta\)-D is less commonly used than other definitions. The choice of derivative hinges on the specific problem, the modelled behavior, and desired solution properties.
Among these techniques, modified \((\frac{G^{\prime }}{G^2})\)-expansion technique (Al-Harbi et al. 2023) has gained attention for its ability to construct exact solutions for time-fractional and space-time fractional differential equations. This method aims to provide analytical solutions for a wide range of fractional differential equations. In this research work, we explore the new fractional solutions for the NLCRW equation by utilizing the modified \((\frac{G^{\prime }}{G^2})\)-expansion technique, with the help of \(\beta\)-D. The fractional beta derivative generalizes the concept of fractional derivatives by introducing the beta function parameters \(\alpha\) and \(\beta\). It allows for differentiation with fractional orders that can be more flexible and versatile than traditional fractional derivatives. However, it’s important to note that the fractional beta derivative is not as commonly studied or utilized as some other fractional derivative definitions.
In this work, the researchers find the optical soliton solutions for two nonlinear models, namely Wazwaz Kaur Boussinesq equation (Ansar et al. 2023) and coupled Riemann wave equation (Silambarasan and Nisar 2023) by utilizing the modified \((\frac{G^{\prime }}{G^2})\)-expansion technique (Al-Harbi et al. 2023) with the help of Conformable, M-truncated and beta derivatives. These nonlinear equations have applications in modern communication network technology, optical fiber, ion-acoustic, and magneto-sound waves in plasma, homogeneous, and stationary media, particularly in the propagation of tidal and tsunami waves. The proposed scheme gives five different types of solutions such as M-shaped soliton, W-shaped soliton, bright soliton and dark soliton solutions etc.
We divided the present study into six different sections. Section 2 provides definitions for beta, conformable, and M-truncated derivatives. Section 3 covers the general steps of the proposed scheme, while Sect. 4 covers its applications, graphical discussion and graph-finding using Mathematica are presented in Sect. 5. The conclusion is presented in the last Sect. 6.
2 Preliminaries
This section provides a compilation of derivative definitions and their fundamental attributes.
2.1 Beta derivative
Definition
Let \(x\in {\mathbb {R}}, t\ge 0\) and \(u:[x,\infty )\rightarrow {\mathbb {R}}\) be a continuous function. Then \(\beta\)-derivative of order \(\beta\) is defined as (Ansar et al. 2023)
where \(\Gamma\) is gamma function defined as: \(\Gamma (\nu )=\int _{0}^{\infty }t^{\nu -1}e^{-t}dt\)
Properties of Beta derivative: let \(\kappa (t)\) and \(\chi (t)\) be differentiable functions of order \(\beta\) such that \(0<\beta \le 1\) and \(t\ge 0\), then
-
1.
\(D^\beta (a\kappa (t)+b\chi (t))=aD^\beta (\kappa (t))+b D^\beta (\chi (t)), \forall a,b \in {\mathbb {R}}\).
-
2.
\(D^\beta (\kappa (t)\chi (t))= \kappa (t)D^\beta (\chi (t))+\chi (t)D^\beta (\kappa (t))\).
-
3.
\(D^\beta (\frac{\kappa (t)}{\chi (t)})=\frac{\kappa (t)D^\beta (\chi (t))-\chi (t)D^\beta (\kappa (t))}{\chi (t)^2}\).
-
4.
\(D^\beta (c)=0\), for any constant c.
-
5.
Considering \(\epsilon =(t+\frac{1}{\Gamma (\beta )})^{1-\beta }\delta , \delta \rightarrow 0\) when \(\epsilon \rightarrow 0\), therefore we get
$$\begin{aligned} D^\beta (\chi (t))=\left( t+\frac{1}{\Gamma (\beta )}\right) ^{1-\beta } \frac{d\chi (t)}{dt}, \end{aligned}$$with \(\psi =\frac{c}{\beta }(t+\frac{1}{\Gamma (\beta )})^{\beta }\), where c is arbitrary constant. The research (Khalil et al. 2014) provided the proofs of the above-mentioned properties of \(\beta\)-derivative.
2.2 M-Truncated derivative
The M-TD for \(u:[x,\infty )\rightarrow {\mathbb {R}}\) of order \(\beta \in (0,1]\) is defined as (Hussain et al. 2020)
for \(t>0\) and \(_kE_\chi (\cdot ), \chi >0\), where \(_kE_\chi (\cdot )\) is truncated Mittag–Leffler function (Sousa and de Oliveira 2017) with one parameter is defined as follows:
Theorem 1
Let \(\beta \in (0,1], \chi >0, a,b\in {\mathbb {R}}\) and G, H are differentiable functions of order \(\beta\).
-
1.
\(D_{M,\psi }^\beta (aG(\psi )+bH(\psi ))=aD_{M,\psi }^\beta (G(\psi ))+b D_{M,\psi }^\beta (H(\psi )), \forall a,b \in {\mathbb {R}}\).
-
2.
\(D_{M,\psi }^\beta (G(\psi )H(\psi ))= G(\psi )D_{M,\psi }^\beta (H(\psi ))+H(\psi )D_{M,\psi }^\beta (G(\psi ))\).
-
3.
\(D_{M,\psi }^\beta (\frac{G(\psi )}{H(\psi )})=\frac{G(\psi )D_{M,\psi }^\beta (H(\psi ))-H(\psi )D_{M,\psi }^\beta (G(\psi ))}{H(\psi )^2}\).
-
4.
\(D_{M,\psi }^\beta (c)=0\), for any constant c.
-
5.
\(D_{M,\psi }^\beta G(\psi )=\frac{\psi ^{1-\beta }}{\Gamma (\chi +1)}\frac{dG}{d\psi }\).
2.3 Conformable derivative
Suppose \(u:[x,\infty )\rightarrow {\mathbb {R}}\) be a function then the Conformable derivative (C-D) for the function u[t] of order \(\beta\), defined as \(D_{C,t}^\beta u(t)=\lim _{\epsilon \rightarrow 0}{\frac{u(t+\epsilon (t)^{1-\beta })-u(t)}{\epsilon }}\), for \(t>0\) and \(\beta \in (0,1]\). Additionally, the properties and theorems associated with C-D are thoroughly addressed in the work of reference (Shahen et al. 2020).
Theorem 2
Let \(\beta \in (0,1], \mu ,\eta \in {\mathbb {R}}\) and u, v are differentiable functions of order \(\beta\) at \(t>0\).
-
1.
\(D_{C,\psi }^\beta (\mu u(\psi )+\eta v(\psi ))=\mu D_{C,\psi }^\beta (u(\psi ))+\eta D_{C,\psi }^\beta (v(\psi )), \forall \mu ,b \in {\mathbb {R}}\).
-
2.
\(D_{C,\psi }^\beta (u(\psi )v(\psi ))= u(\psi )D_{C,\psi }^\beta (v(\psi ))+v(\psi )D_{C,\psi }^\beta (u(\psi ))\).
-
3.
\(D_{C,\psi }^\beta (\frac{u(\psi )}{v(\psi )})=\frac{u(\psi )D_{C,\psi }^\beta (v(\psi ))-v(\psi )D_{C,\psi }^\beta (u(\psi ))}{v(\psi )^2}\).
-
4.
\(D_{C,\psi }^\beta (c)=0\), for any constant c.
-
5.
\(D_{C,\psi }^\beta u(\psi )=\psi ^{1-\beta }\frac{du}{d\psi }\).
3 The strategy of scheme
In this section, we describe the general steps of the modified \(\left( \frac{G'}{G^2}\right)\)-expansion scheme:
Let’s assume the following travelling wave equation in the form of PDE as
where \(Q=Q(x,y,t)\). Let us assume the below given propagational waves transformation
putting the Eq. (3.2) into Eq. (3.1), then we get the non-linear ODE such as
Where the superscript \(^{\prime }\) is derivative w.r.t \(\Phi\) and we assume the solution of Eq. (3.3) can be demonstrate in generalized form as follows:
where \(G=G(\Phi )\) and satisfy the equation
where \(\Lambda , \varUpsilon\) and \(\upsilon\) are the arbitrary constants. Now we find the positive value of N (where N is the balance number), the value of the highest order linear term and the highest order non-linear term present in the Eq. (3.3). By equating the highest order of both linear term and non-linear term involved in the equation. If n is the order of \(Q(\Phi )\) and \(DQ(\Phi )\), then the degree of the other expression is given below.
we find all the values of derivatives of the Eq. (3.4) by using Eq. (3.5) according to the given ODE as in Eq. (3.3). Then collect all terms involving \(\left( \frac{G^{\prime }}{G^2}\right) ^j\), where \((\textrm{j} = 0, 1, 2,\ldots , \textrm{n})\) and setting all the coefficients of \(\left( \frac{G^{\prime }}{G^2}\right) ^j\) equal to zero. As a result, we get a system of algebraic equations. By using these equations, we find the values of unknown constants by using the Mathematica tool.
The general solution of the Eq. (3.5) has three cases such as:
Case:1 If \(\Lambda \upsilon >0\) and \(\varUpsilon =0\), then we have
where \(\phi _1, \phi _2\) be arbitrary constants.
Case:2 If \(\Lambda \upsilon <0\) and \(\varUpsilon =0\), then we have
Case:3 If \(\Lambda \ne 0,\upsilon =\varUpsilon =0\), then we have
Case:4 If \(\varUpsilon \ne 0,\Delta \ge 0\), then we have
where \(\Delta =\varUpsilon ^2-4 \Lambda \upsilon\).
Case:5 If \(\varUpsilon \ne 0,\Delta <0\), then we have
4 Applications of modified \(\left( \frac{G^{\prime }}{G^2}\right)\)-expansion scheme
4.1 Coupled Riemann wave equation
Consider the (\(2+1\))-dimensional non-linear CRW equation (Ansar et al. 2023) of the form
where p, q and r are the nonzero parameters. This model can be expressed in the sense of \(\beta\)-derivative such as
Here p, q and r are also the nonzero parameters that discuss the interaction between a long wave propagation and a Riemann wave. Where \(D_{\beta ,t}^{\kappa }\) is \(\beta\)-D of \({\mathcal {U}}(x,y,t)\) and the term \(\kappa\) shows the fractional parameter and \(0<\kappa \le 1\).
In M-TD, the suggested model has the following structure.
where \(D_{M,t}^{\kappa }\) is M-TD with \(\kappa\) is fractional order.
In C-D, the suggested model has the following structure.
where \(D_{C,t}^{\kappa }\) is C-D with \(\kappa\) is conformable operator.
Consider the wave transformation and there are three different definitions for the travelling wave parameter \(\zeta\).
In \(\beta\)-D, \(\zeta\) takes on the following form
where \(\mu ,\sigma\) and \(\nu \ne 0\).
In M-TD, \(\zeta\) takes on the following form
in C-D, \(\zeta\) takes on the following form
convert the Eqs. (4.2), (4.3) and (4.4) into ODE by using the wave transformation (4.5), (4.6) and (4.7) and we have
using the zero integration by the second equation of (4.8), we obtain
after integration, we substitute the Eq. (4.9) into the 1st Eq. of (4.8) and we have
where \({\mathcal {U}}^{\prime \prime }=\frac{d^2 {\mathcal {U}}}{d\zeta ^2}\). Applying the balancing method, balancing the highest linear and non-linear terms of Eq. (4.10) and we get the balance number is \(N=2\). By using the balance number, we can express the Eq. (3.4) as
where \(G=G(\zeta )\), and \(a_0,a_1,a_2,b_1,b_2\) are the unknown constants whose values we want to find. We substitute the Eq. (4.11) with the aid of Eq. (3.5) into the Eq. (3.10) and after substitution, we have collected all such coefficients like power as \(\left( \frac{G^{\prime }}{G^2}\right) ^j,\;(j=0,\pm 1,\pm 2,\pm 3,\ldots )\). Due to this, we attain with the help of Mathematica an algebraic system of equations such as
we solve the equations of an algebraic system (4.12) and we get the following outcomes
Set:1
we putting the above values of unknown constants in the Eq. (4.11) and have different types of solutions mentioned in (3.7), (3.8), (3.9), (3.10) and (3.11).
Case:1 if \(\Lambda \upsilon >0\) and \(\varUpsilon =0\), then we have trigonometric solution as
where \(\zeta =\mu x+\sigma y-\frac{\nu \left( t+\frac{1}{\Gamma (\beta )}\right) ^{\beta }}{\beta }\), \(\zeta =\mu x+\sigma y-\nu \frac{\Gamma (\chi +1 )}{\beta } t^{\beta }\) and \(\zeta =\mu x+\sigma y-\frac{\nu }{\beta } t^{\beta }\).
Case:2 if \(\Lambda \upsilon <0\) and \(\varUpsilon =0\), then we get hyperbolic function as
Case:3 if \(\Lambda \ne 0,\upsilon =\varUpsilon =0\), then we attain rational function as
Case:4 if \(\varUpsilon \ne 0,\Delta \ge 0\), where \(\Delta =\varUpsilon ^2-4 \Lambda \upsilon\) then we attain
Case:5 if \(\varUpsilon \ne 0,\Delta < 0\), then we have
Set:2
we put the above solutions of unknown constants in the Eq. (4.11).
Case:1 if \(\Lambda \upsilon >0\) and \(\varUpsilon =0\), then we have
Case:2 if \(\Lambda \upsilon <0\) and \(\varUpsilon =0\), then we get
Case:3 if \(\Lambda \ne 0,\upsilon =\varUpsilon =0\), then we attain rational function as
Case:4 if \(\varUpsilon \ne 0,\Delta \ge 0\), where \(\Delta =\varUpsilon ^2-4 \Lambda \upsilon\) then we ascertain
Case:5 if \(\varUpsilon \ne 0,\Delta < 0\), then we have
4.2 Wazwaz Kaur Boussinesq equation
Consider the (\(2+1\))-dimensional non-linear WKB equation (Silambarasan and Nisar 2023) of the form
here, \(\vartheta =\vartheta (x,y,t)\) and \(\varkappa _i, i=1,2,3\) are the nonzero constants. This non-linear model can be expressed as in the sense of \(\beta\)-derivative such as
where \(D_{\beta ,t}^{\kappa }\) is \(\beta\)-D of \(\vartheta (y,z,t)\) and the term \(\kappa\) shows the fractional parameter and \(0<\kappa \le 1\).
In M-TD, the suggested model has the following structure.
where \(D_{M,t}^{\kappa }\) is M-TD with \(\kappa\) is fractional order.
In C-D, the suggested model has the following structure.
where \(D_{C,t}^{\kappa }\) is C-D with \(\kappa\) is conformable operator.
Consider the wave transformation \(\vartheta (x,y,t)=\vartheta (\psi )\) and \(\psi =u(x+y+\lambda t)\), where u is represent the wave number and \(\lambda\) represent the frequency. There are three different types of definitions for the travelling wave parameter \(\psi\).
In \(\beta\)-D, \(\psi\) takes on the following form
In M-TD, \(\psi\) takes on the following form
In C-D, \(\psi\) takes on the following form
Convert the PDE’s represents in Eq. (4.24), (4.25) and (4.26) into ODE by using the wave transformations showed in (4.27), (4.28) and (4.29) and we get
here, Eq. (4.30) is integrable and also integrates twice with respect to \(\psi\) and taking integration constant equal to zero and we attain the ODE such as
in Eq. (4.31), compare the highest linear term and non-linear term according to the balancing principle and we get balance number \(N=2\). Initially, we assume the solution of the Eq. (4.31) by using Eq. (3.4) as
where \(G=G(\psi )\), and \(a_0,a_1,a_2,b_1,b_2\) are the unknown constants whose values we want to find. According to the Eq. (4.31), we substitute the Eq. (4.32) with the help of Eq. (3.5) into the Eq. (4.31). After substitution, we have collected all such coefficients like power as \(\left( \frac{G^{\prime }}{G^2}\right) ^i,\,(i=0,\pm 1,\pm 2,\pm 3,\ldots )\). Due to this process, we attain an algebraic system of equations and by solving this system of equations by using Mathematica software, we get the following outcomes
Set:1
we putting the values of unknown constants in the Eq. (4.32), that are included in (Set:1) and the term \(\left( \frac{G^{\prime }}{G^2}\right)\) involved in Eq. (4.32) have different types of solutions represents in Eqs. (3.7), (3.8), (3.9), (3.10) and (3.11), then we have
Case:1 if \(\Lambda \upsilon >0\) and \(\varUpsilon =0\), then we have trigonometric solution as
where \(\psi =u\left( x+y+\frac{\lambda \left( t+\frac{1}{\Gamma (\beta )}\right) ^{\beta }}{\beta }\right) , \psi =u\left( x+y+\lambda \frac{\Gamma (\chi +1 )}{\beta } t^{\beta }\right)\) and \(\psi =u\left( x+y+ \frac{\lambda }{\beta } t^{\beta }\right)\).
Case:2 if \(\Lambda \upsilon <0\) and \(\varUpsilon =0\), then we get hyperbolic function as
Case:3 if \(\Lambda \ne 0,\upsilon =\varUpsilon =0\), then we ascertain rational function as
Case:4 if \(\varUpsilon \ne 0,\Delta \ge 0\), where \(\Delta =\varUpsilon ^2-4 \Lambda \upsilon\) then we get
Case:5 if \(\varUpsilon \ne 0,\Delta < 0\), then we have
Set:2
we putting the values of unknown constants in the Eq. (4.32), that are included in (Set:2) and we get
Case:1 if \(\Lambda \upsilon >0\) and \(\varUpsilon =0\), then we have
Case:2 if \(\Lambda \upsilon <0\) and \(\varUpsilon =0\), then we get hyperbolic function as
Case:3 if \(\Lambda \ne 0,\upsilon =\varUpsilon =0\), then we ascertain rational function as
Case:4 if \(\varUpsilon \ne 0,\Delta \ge 0\), then we get
Case:5 if \(\varUpsilon \ne 0,\Delta < 0\), then we have
5 Graphical results and discussion
In this research, some fractional derivative operators were used to solve the non-linear coupled Riemann wave equation and Wazwaz Kaur Boussinesq equation. The solutions were attained by employing the reliable integration technique known as modified \((\frac{G^{\prime }}{G^2})\)-expansion with the aid of conformable, Beta and M-truncated derivative operators. The results of this method’s multiple solutions generation are contrasted in 2D and 3D graphs for three different derivative operators. This method provides the different types of optical solitary wave solutions including dark soliton, bright soliton, dark-bright soliton, and W-shaped soliton solutions. C-D and the fractional derivatives, such as \(\beta\)-D and M-TD, can be compared perfectly using 2-dimensional graphs, which is quite useful. We observe that the solitary waves tiny shifts when the change fractional derivative operator is without changing the shape of the curve. This demonstrates that their travelling wave solutions are symmetric. A single solution can lead to the production of multiple types of solutions if the parameters take on various specific values. The modified \((\frac{G^{\prime }}{G^2})\)-expansion technique was used to obtain the soliton solutions. They provide a visual representation of the spatial and temporal behaviour of solitary waves. The analytical solution’s graphs make it abundantly evident that the modified \((\frac{G^{\prime }}{G^2})\)-expansion method is more reliable and effective (Figs. 1, 2 and 3).

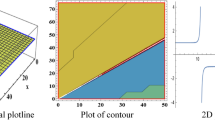
The 2-D and 3-D W-type wave representation of \({\mathcal {U}}_{2 b}\) for the specific values of \(p=0.6,\sigma =0.2,\mu =0.4,\Lambda =-1.2,\upsilon =1,\phi _1=1,\varUpsilon =0,\phi _2=3,q=0.3,r=0.2\). a \(\beta\)-D with fractional order is 0.6, b M-TD with fractional order is 0.6 and \(\chi =1.3\), c C-D with fractional order is 0.6

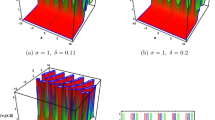
The 2-D and 3-D dark type wave form representation of \(\vartheta _{1 b}\) for the specific values of \(u=0.9,\varkappa _1=0.2,\varkappa _2=0.5,\varkappa _3=0.1,\Lambda =0.1,\upsilon =-1.5,\varUpsilon =0,\phi _1=2,\phi _2=1\). a \(\beta\)-D with fractional order is 0.7, b M-TD with fractional order is 0.7 and \(\chi =1.5\), c C-D with fractional order is 0.7

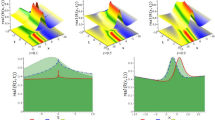
The 2-D and 3-D dark-bright type wave form of \(\vartheta _{2 d}\) for the specific values of \(u=0.2,\varkappa _1=0.2,\varkappa _2=0.5,\varkappa _3=0.5,\Lambda =0.2,\upsilon =0.1,\varUpsilon =2,\phi _1=1,\phi _2=2\). a \(\beta\)-D with fractional order is 0.6, b M-TD with fractional order is 0.6 and \(\chi =0.8\), c C-D with fractional order is 0.6
6 Conclusion
Modified \((\frac{G^{\prime }}{G^2})\)-expansion technique has been successfully applied to construct new traveling optical wave solutions for the non-linear CRW equation and NLWKB equation. The ability to find new solutions using this technique can provide valuable insights into the behavior of non-linear problems described by fractional differential equations. We construct new solitary wave solutions such as dark, dark-bright and W-type soliton solutions with the help of C-D, \(\beta\)-D and M-TD. In this work, the fractional derivatives are successfully compared and analysed. This demonstrates the effectiveness and reliability of C-D and the fractional derivatives such as \(\beta\)-D and M-TD, but the \(\beta\) derivative works better than the other two derivatives. The solitary wave solutions that have been found will be useful in the study of issues involving engineering, mechanical theory, tsunamis, and tidal waves. Graphically it has been observed that the solitary waves tiny shifts when the change fractional derivative operator is without changing the shape of the curve. This demonstrates that their travelling wave solutions are symmetric. Modified \((\frac{G^{\prime }}{G^2})\)-expansion technique, involves assuming an expansion for the solution and using algebraic manipulation to determine the functions in the expansion. The success of this method in constructing solutions for the non-linear CRW and WKB equations indicates its versatility in dealing with various types of fractional differential equations and capturing the dynamics of such models accurately.
Availability of data and materials
Data will be provided on request.
References
Abdulazeez, S.T., Modanli, M.: Analytic solution of fractional order pseudo-hyperbolic telegraph equation using modified double Laplace transform method. Int. J. Math. Comput. Eng. (2023)
Alharbi, F.M., Baleanu, D., Ebaid, A.: Physical properties of the projectile motion using the conformable derivative. Chin. J. Phys. 58, 18–28 (2019)
Al-Harbi, M., Al-Hamdan, W., Wazzan, L.: Exact traveling wave solutions to Phi-4 equation and Joseph–Egri (TRLW) equation and Calogro–Degasperis (CD) equation by modified \((\frac{G{^{\prime }}}{G^2})\)-expansion method. J. Appl. Math. Phys. 11(7), 2103–2120 (2023)
Aljahdaly, N.H., Shah, R., Naeem, M., Arefin, M.A.: A comparative analysis of fractional space-time advection-dispersion equation via semi-analytical methods. J. Funct. Spaces 2022 (2022)
Aljahdaly, N.H.: Some applications of the modified \((\frac{G{^{\prime }}}{G^2})\)-expansion method in mathematical physics. Results Phys. 13, 102272 (2019)
Almeida, R.: A Caputo fractional derivative of a function with respect to another function. Commun. Nonlinear Sci. Numer. Simul. 44, 460–481 (2017)
Alquran, M., Jaradat, I.: Identifying combination of Dark-Bright Binary-Soliton and Binary-Periodic Waves for a new two-mode model derived from the (2 + 1)-dimensional Nizhnik–Novikov–Veselov equation. Mathematics 11(4), 861 (2023)
Alquran, M., Jaradat, I., Yusuf, A., Sulaiman, T.A.: Heart-cusp and bell-shaped-cusp optical solitons for an extended two-mode version of the complex Hirota model: application in optics. Opt. Quantum Electron. 53, 1–13 (2021)
Ansar, R., Abbas, M., Mohammed, P.O., Al-Sarairah, E., Gepreel, K.A., Soliman, M.S.: Dynamical study of coupled Riemann wave equation involving conformable, beta, and M-truncated derivatives via two efficient analytical methods. Symmetry 15(7), 1293 (2023)
Arefin, M.A., Sadiya, U., Inc, M., Uddin, M.H.: Adequate soliton solutions to the space-time fractional telegraph equation and modified third-order KdV equation through a reliable technique. Opt. Quantum Electron. 54(5), 309 (2022)
Arefin, M.A., Khatun, M.A., Islam, M.S., Akbar, M.A., Uddin, M.H.: Explicit soliton solutions to the fractional order nonlinear models through the Atangana beta derivative. Int. J. Theor. Phys. 62(6), 134 (2023)
Arshed, S., Biswas, A., Abdelaty, M., Zhou, Q., Moshokoa, S.P., Belic, M.: Optical soliton perturbation with Kundu–Eckhaus equation by exp\(-\phi (\xi )\)-expansion scheme and \((\frac{G{^{\prime }}}{G^2})\)-expansion method. Optik 172, 79–85 (2018)
Arshed, S., Rahman, R.U., Raza, N., Khan, A.K., Inc, M.: A variety of fractional soliton solutions for three important coupled models arising in mathematical physics. Int. J. Mod. Phys. B 36(01), 2250002 (2022)
Atangana, A., Doungmo Goufo, E.F.: Extension of matched asymptotic method to fractional boundary layers problems. Math. Probl. Eng. (2014)
Atangana, A., Gómez-Aguilar, J.F.: Numerical approximation of Riemann-Liouville definition of fractional derivative: from Riemann–Liouville to Atangana–Baleanu. Numer. Methods Partial Differ. Equ. 34(5), 1502–1523 (2018)
Atangana, A., Koca, I.: Chaos in a simple nonlinear system with Atangana–Baleanu derivatives with fractional order. Chaos Solitons Fractals 89, 447–454 (2016)
Attaullah Shakeel, M., Ahmad, B., Shah, N.A., Chung, J.D.: Solitons solution of Riemann wave equation via modified Exp function method. Symmetry 14(12), 2574 (2022)
Bibi, A., Shakeel, M., Khan, D., Hussain, S., Chou, D.: Study of solitary and kink waves, stability analysis, and fractional effect in magnetized plasma. Results Phys. 44, 106166 (2023)
Ezquerro, J.A., Grau, A., Grau-Sánchez, M., Ángel Hernández, M.: On the efficiency of two variants of Kurchatov’s method for solving nonlinear systems. Numer. Algorithms 64, 685–698 (2013)
Gepreel, K.A.: Exact solutions for nonlinear integral member of KPh differential equation using the modified \((\frac{w}{g})\)-expansion method in mathematical physics. Comput. Math. Appl. 72(9), 2072–2083 (2016)
Ghanbari, B., Inc, M.: A new generalized exponential rational function method to find exact special solutions for the resonance nonlinear Schrödinger equation. Eur. Phys. J. Plus 133(4), 142 (2018)
Hussain, A., Jhangeer, A., Abbas, N., Khan, I., Sherif, E.S.M.: Optical solitons of fractional complex Ginzburg–Landau equation with conformable, beta, and M-truncated derivatives: a comparative study. Adv. Differ. Equ. 2020, 1–19 (2020)
Jannat, N., Kaplan, M., Raza, N.: Abundant soliton-type solutions to the new generalized KdV equation via auto-Bäcklund transformations and extended transformed rational function technique. Opt. Quantum Electron. 54(8), 466 (2022)
Jaradat, I., Alquran, M.: Construction of solitary two-wave solutions for a new two-mode version of the Zakharov–Kuznetsov equation. Mathematics 8(7), 1127 (2020)
Jaradat, I., Alquran, M.: A variety of physical structures to the generalized equal-width equation derived from Wazwaz–Benjamin–Bona–Mahony model. J. Ocean Eng. Sci. 7(3), 244–247 (2022)
Jaradat, I., Alquran, M.: Geometric perspectives of the two-mode upgrade of a generalized Fisher–Burgers equation that governs the propagation of two simultaneously moving waves. J. Comput. Appl. Math. 404, 113908 (2022)
Jaradat, I., Alquran, M., Ali, M.: A numerical study on weak-dissipative two-mode perturbed Burgers’ and Ostrovsky models: right-left moving waves. Eur. Phys. J. Plus 133, 1–6 (2018)
Jumarie, G.: Modified Riemann–Liouville derivative and fractional Taylor series of nondifferentiable functions further results. Comput. Math. Appl. 51(9–10), 1367–1376 (2006)
Khalil, R., Al Horani, M., Yousef, A., Sababheh, M.: A new definition of fractional derivative. J. Comput. Appl. Math. 264, 65–70 (2014)
Khatun, M.A., Arefin, M.A., Uddin, M.H., İnç, M., Akbar, M.A.: An analytical approach to the solution of fractional-coupled modified equal width and fractional-coupled Burgers equations. J. Ocean Eng. Sci. (2022)
Khatun, M.A., Arefin, M.A., Akbar, M.A., Uddin, M.H.: Numerous explicit soliton solutions to the fractional simplified Camassa–Holm equation through two reliable techniques. Ain Shams Eng. J. 102214 (2023)
Kopçasız, B., Seadawy, A.R., Yaşar, E.: Highly dispersive optical soliton molecules to dual-mode nonlinear Schrödinger wave equation in cubic law media. Opt. Quantum Electron. 54(3), 194 (2022)
Losseva, T.V., Popel, S.I., Golub’, A.P.: Ion-acoustic solitons in dusty plasma. Plasma Phys. Rep. 38, 729–742 (2012)
Mamun Miah, M., Shahadat Ali, H.M., Ali Akbar, M., Majid Wazwaz, A.: Some applications of the \((G^{\prime }/G,1/G)\)-expansion method to find new exact solutions of NLEEs. Eur. Phys. J. Plus 132, 1–15 (2017)
Muhamad, K.A., Tanriverdi, T., Mahmud, A.A., Baskonus, H.M.: Interaction characteristics of the Riemann wave propagation in the (2 + 1)-dimensional generalized breaking soliton system. Int. J. Comput. Math. 100(6), 1340–1355 (2023)
Ortigueira, M.D., Machado, J.T.: What is a fractional derivative? J. Comput. Phys. 293, 4–13 (2015)
Qureshi, S., Chang, M.M., Shaikh, A.A.: Analysis of series RL and RC circuits with time-invariant source using truncated M, Atangana beta and conformable derivatives. J. Ocean Eng. Sci. 6(3), 217–227 (2021)
Raza, N., Ur Rahman, R., Seadawy, A., Jhangeer, A.: Computational and bright soliton solutions and sensitivity behavior of Camassa–Holm and nonlinear Schrödinger dynamical equation. Int. J. Mod. Phys. B 35(11), 2150157 (2021)
Romero, L.G., Luque, L.L., Dorrego, G.A., Cerutti, R.A.: On the k-Riemann–Liouville fractional derivative. Int. J. Contemp. Math. Sci 8(1), 41–51 (2013)
Sadiya, U., Inc, M., Arefin, M.A., Uddin, M.H.: Consistent travelling waves solutions to the non-linear time fractional Klein–Gordon and Sine–Gordon equations through extended tanh-function approach. J. Taibah Univ. Sci. 16(1), 594–607 (2022)
Sene, N.: Second-grade fluid model with Caputo–Liouville generalized fractional derivative. Chaos Solitons Fractals 133, 109631 (2020)
Shahen, N.H.M., Bashar, M.H., Ali, M.S.: Dynamical analysis of long-wave phenomena for the nonlinear conformable space-time fractional (2 + 1)-dimensional AKNS equation in water wave mechanics. Heliyon 6(10) (2020)
Shakeel, M., Bibi, A., AlQahtani, S.A., et al.: Dynamical study of a time fractional nonlinear Schrödinger model in optical fibers. Opt. Quantum Electron. 55, 1010 (2023a)
Shakeel, M., Bibi, A., Chou, D., Zafar, A.: Study of optical solitons for Kudryashov’s Quintuple power-law with dual form of nonlinearity using two modified techniques. Optik 273, 170364 (2023b)
Shakeel, M., Bibi, A., Zafar, A. et al.: Solitary wave solutions of Camassa–Holm and Degasperis–Procesi equations with Atangana’s conformable derivative. Comput. Appl. Math. (2023c)
Silambarasan, R., Nisar, K.S.: Doubly periodic solutions and non-topological solitons of \((2+ 1)\)-dimension Wazwaz Kaur Boussinesq equation employing Jacobi elliptic function method. Chaos Solitons Fractals 175, 113997 (2023)
Singh, R., Mishra, J., Gupta, V. K.: The dynamical analysis of a Tumor Growth model under the effect of fractal fractional Caputo-Fabrizio derivative. Int. J. Math. Comput. Eng. (2023)
Sousa, J.V.D.C., de Oliveira, E.C.: A new truncated \(M\)-fractional derivative type unifying some fractional derivative types with classical properties. arXiv preprint arXiv:1704.08187 (2017)
Sousa, J.V.D.C., De Oliveira, E.C.: On the \(\psi\)-Hilfer fractional derivative. Commun. Nonlinear Sci. Numer. Simul. 60, 72–91 (2018)
Suret, P., Tikan, A., Bonnefoy, F., Copie, F., Ducrozet, G., Gelash, A., Randoux, S.: Nonlinear spectral synthesis of soliton gas in deep-water surface gravity waves. Phys. Rev. Lett. 125(26), 264101 (2020)
Taşcan, F., Bekir, A.: Analytic solutions of the (2 + 1)-dimensional nonlinear evolution equations using the sine–cosine method. Appl. Math. Comput. 215(8), 3134–3139 (2009)
Wazwaz, A.M.: The variational iteration method for solving linear and nonlinear Volterra integral and integro-differential equations. Int. J. Comput. Math. 87(5), 1131–1141 (2010)
Wen-An, L., Hao, C., Guo-Cai, Z.: The \((\frac{w}{g})\)-expansion method and its application to Vakhnenko equation. Chin. Phys. B 18(2), 400 (2009)
Yépez-Martínez, H., Rezazadeh, H.: New analytical solutions by the application of the modified double sub-equation method to the (1 + 1)-Schamel-KdV equation, the Gardner equation and the Burgers equation. Phys. Scr. 97(8), 085218 (2022)
Yong, X., Gao, J., Zhang, Z.: Singularity analysis and explicit solutions of a new coupled nonlinear Schrödinger type equation. Commun. Nonlinear Sci. Numer. Simul. 16(6), 2513–2518 (2011)
Yusuf, A., Inc, M., Aliyu, A.I., Baleanu, D.: Optical solitons possessing beta derivative of the Chen–Lee–Liu equation in optical fibers. Front. Phys. 7, 34 (2019)
Zafar, A., Shakeel, M., Ali, A., Rezazadeh, H., Bekir, A.: Analytical study of complex Ginzburg–Landau equation arising in nonlinear optics. J. Nonlinear Opt. Phys. Mater. 32(01), 2350010 (2023)
Zaman, U.H.M., Arefin, M.A., Akbar, M.A., Uddin, M.H.: Analyzing numerous travelling wave behavior to the fractional-order nonlinear Phi-4 and Allen–Cahn equations throughout a novel technique. Results Phys. 37, 105486 (2022)
Zaman, U.H.M., Arefin, M.A., Akbar, M.A., Uddin, M.H.: Study of the soliton propagation of the fractional nonlinear type evolution equation through a novel technique. PLoS ONE 18(5), e0285178 (2023)
Zhang, S.: A generalized new auxiliary equation method and its application to the (2 + 1)-dimensional breaking soliton equations. Appl. Math. Comput. 190(1), 510–516 (2007)
Acknowledgements
This work is partly supported by the National Natural Science Foundation of China (NSFC) under Grant No. 72293574, the Natural Science Foundation of Hunan Province under Grant No. 2022JJ30677, the National Key Research and Development Program of China under Grant No. 2022YFC3303303.
Funding
Not available.
Author information
Authors and Affiliations
Contributions
All the authors are contributed equally.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Saboor, A., Shakeel, M., Liu, X. et al. A comparative study of two fractional nonlinear optical model via modified \(\left( \frac{G^{\prime }}{G^2}\right)\)-expansion method. Opt Quant Electron 56, 259 (2024). https://doi.org/10.1007/s11082-023-05824-3
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11082-023-05824-3
Keywords
- Soliton solutions
- Modified \(\left( \frac{G'}{G^2}\right)\)-expansion method
- Coupled Riemann wave equation
- Wazwaz Kaur Boussinesq equation
- Beta derivative
- M-Truncated derivative
- Conformable derivative