
Abstract
In this article, we investigate the generalised version of the nonlinear Schrödinger equation namely the fractional Schrödinger–Hirota (NLFSH) equation with third order dispersion and Kerr law of nonlinearity, which describes the dynamics of optical solitons in a dispersive optical fiber. An amelioration of the approaches, namely the improved F-expansion approach and the unified method, are used to formulate the abundant optical solitons. After that, utilizing the aforementioned techniques and computational software, different optical solitons are retrieved, including dark, singular, periodic, rational, hyperbolic solitary wave, and trigonometric function solutions. Secondly, we discuss the stability analysis of our selected model which confirm that the governing model is stable. Additionally, the acquired results demonstrate that the suggested strategies have a significant ability to successfully acquire numerous fresh soliton type solutions for the NLFSH equation. For certain values of the required free parameters, the dynamical behaviours of these solutions are visualised in 2D and 3D using Mathematica 13.0. The acquired findings demonstrate the power, effectiveness, and simplicity of the suggested strategies for finding novel solutions to diverse classes of nonlinear partial differential equations in optical engineering and applied sciences.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Nonlinear partial differential equations (NLPDEs) are significant families of equation that are extensively used in the modeling and analysis of nonlinear evolutionary dynamical systems in engineering, fluid mechanics, geochemistry, hydrodynamics, solid state physics, water waves, plasma physics, chaos theory, solitary waves theory, cosmology and optical fibers, among other disciplines and some more (Yusuf et al. 2022; Younas et al. 2023; Tanwar and Wazwaz 2022). Soliton theory is very useful in many domains to comprehend these phenomena. Solitons are a type of wave that always has the same shape and never dissipates energy. Soliton is a very important concept in the disciplines of electromagnetism and communications because of these characteristics. The dynamics of the propagation of solitons has been worked by the aid of nonlinear Schrodinger’s equation (NLSE). This equation for optical solitons has produced a wide variety of results. In order to describe nonlinear physical events, one of the most crucial components is to obtain exact solutions to nonlinear fractional partial differential equations (NLFPDEs) (Abaid Ur Rehman et al. 2022). Due to their numerous uses in contemporary communication sectors, optical solitons are progressively assuming centre stage in nonlinear optics. Long-haul optical fibers are currently being investigated for trans-oceanic and trans-continental data transmission using optical communications. However, some aspects of optical communication remain unresolved, such as the well-known dispersive optical solitons, which hinder communication when they release soliton radiation due to the presence of higher-order dispersion factors.
Moreover, a variety of nonlinear Schrödinger equations (NLSE) are used to describe how soliton propagation changes over time in optical fibres. The Schrödinger–Hirota (SH) equation, in particular, is a significant class of the NLSE that was generated by the use of Lie’s transformation and has seen intense study in recent decades, utilising a variety of analytical and computational techniques (Biswas et al. 2012; Bernstein et al. 2015; Bakodah et al. 2019). Numerous methods have been used to obtain the exact solutions of the fractional Schrödinger–Hirota (FSH) equation, including Rezazadeh et al. Rezazadeh et al. (2018) attained several travelling wave solutions of the nonlinear conformable fractional Schrodinger-Hirota (NLCFSH) equation by employing new extended direct algebraic technique, Eslami et al. (2017) use the first integral method and the functional variable method and get the the bright and singular solutions, the NLCFSHE, which governs ocean wave propagation and optical fibres, a novel soliton solution is obtained by Zafar et al. (2022) via combining the Kudryashov technique and improved \(\left( \frac{G'}{G}\right)\)-expansion with a conformable truncated M-fractional operator, for the extraction of bright, dark, and other soliton solutions, Ray (2020) uses the extended auxiliary equation approach, Kilic and Inc Kilic and Inc (2017) used the Bäcklund transformation to solve the SH equation with power law nonlinearity for optical solitons and solitary wave solutions, Tang (2022) applied the complete discriminant system method to gain the hyperbolic function solutions, rational function solutions, and dispersive optical solitons in optical nanofibers of the NLSH equation with the constraint conditions by employing the \(tanh-coth\) integration algorithm (Sardar et al. 2016).
Conversely, analytical approximation techniques are preferred by scientists because they have deeper physical roots and are more deserving of parametric investigation. As a result, many academics promoted various tactics up until recently namely, Bilinear transformation (Jisha and Dubey 2022), Backland transformation (Zhao et al. 2022), Painleve analysis (Wazwaz et al. 2022), Hirota bilinear method (Bilal et al. 2022; Ismael et al. 2022; Kumar and Mohan 2022), Trilinear analysis (Manafian 2021), Lie point symmetries analysis (Adeyemo et al. 2022), improved generlized riccati mapping scheme (Islam et al. 2022), F-expansion method (Li et al. 2020; Akbulut et al. 2022), new Kudryashov technique (Samir et al. 2022), generlized Kudryashov method (Akbar et al. 2022; El-Sayed and Al-Nowehy 2016), Ansatz method (Akinyemi and Morazara 2022), \(\frac{G'}{G}\)-expansion method (Adeyemo and Khalique 2022), three integral schemes the generalized Kudryashov, the new extended FAN sub-equation approach (Fendzi-Donfack et al. 2023), generlized exponential rational function method (Rehman et al. 2022), extended ratioal sine-cosine/sinh-cosh method (Akbar et al. 2021), tanh method (Chukkol et al. 2017; Hu et al. 2020; Biazar and Ayati 2011), new extended direct algebric method (Gao et al. 2020; Mirhosseini-Alizamini et al. 2022; Hubert et al. 2018), extended sinh-Gordon equation expansion and \(\left( \frac{G'}{G^2}\right)\)-expansion function methods (Sulaiman et al. 2022; Bilal et al. 2022), first integral method (Aggarwal et al. 2018), variational iterative method (Anjum and He 2019; Nadeem and He 2021; Mungkasi 2021; Noeiaghdam et al. 2021), Adomian decomposition method (Cheng et al. 2021), q-homotopy analysis method (Hussain et al. 2022), residual power series method (Modanli et al. 2021; Qazza et al. 2022), improved Bernoulli sub-equation function method (Dusunceli et al. 2021). \(\left( \frac{G'}{G}\right)\)-expansion method (Zulfiqar and Ahmad 2021).
In each of these aforementioned works, a variety of approaches mentioned in Yao et al. (2021); Veeresha et al. (2021a, 2021b) have been proposed for securing soliton solutions of NLPDEs. The choice of an appropriate method is of great importance when using these analytical methods. Among those approaches, the proposed improved F-expansion method and the unified method are reliable and credible mechanisms to construct more general soliton solutions of NLPDEs in engineering and applied sciences. The foremost purpose of these methods are to express the soliton solutions of NLPDEs in terms of functions that satisfy the Riccati equation \(F'(\xi )= p+ F^2(\xi )\) and \(F'(\xi )=\Omega +(F(\chi ))^2\) for improved F-expansion function method and for the unified method, respectively. The main benefit of the improved F-expansion method over the existing other methods mentioned is that this scheme provide more abundant exact soliton solutions including some novel solutions with additional parameters in a simple and straight way. The exact soliton solutions have its great importance to know entirely the effect of the parameters in any circumstances. On the other hand, the advantages of the unified method, firstly it produces many more solutions than the other methods give. Namely, it gives not only the solutions of the other methods but also new exact solutions not obtained using other methods. Secondly, it unifies the merits of all the methods in one method without needing extra effort. Lastly, it has simple algorithm to apply on computer. Unlike the others, it reduces the process on computer as much as sometimes even calculated by hand. The unified method makes easier solving process at computer program. When using the unified method, it is not needed complex algorithm on computer programs. On the other hand, it is essential to use complex algorithm for some members of the \(\left( \frac{G'}{G}\right)\)-expansion method. To exhibit the productivity and dependability of these proposed methods, some higher order nonlinear dynamical models have been solved in which new results are found. It is vital to note that analysis of convergence and stability for the numerical methods is required, a distinct disadvantage when compared with analytical methods that do not require such an analysis. Apart from the physical relevance, soliton solutions of NLPDEs can assist the numerical solvers to measure up to the accuracy of their results and thus aid in the convergence analysis.
Over the past few decades, nonlinear fractional dynamical model research has been increasingly popular. Nonlinear fractional models have thus been utilized to mimic a variety of physical procedures. Compared to the conventionally used integer-order models, these more recent models are more suited and more flexible, because nonlinear models enable scientists to better define and characterise phenomena in everyday life. As a result, under some circumstances, these dynamical models can be used to accurately model genuine physical processes.
In this manuscript, the nonlinear conformable fractional Schrödinger–Hirota (NLCFSH) equation is considered as
Where v(x, t) signify the complex wave profile, \(\alpha\) represents the the coefficient of third order dispersion (3OD). \((.)_t^{(\beta )}\) is the conformable derivative operator.
This article is drafted as follows: The Sect. 3 explains the suggested methods for the NLCFSH equation. The applications of selected method are explained in the Sect. 4. The Sect. 5 discusses the stability study of the NLCFSH equation. The Sect. 6 covers concluding comments. The concluding remarks are included in the Sect. 7.
2 Conformable fractional derivative
Assume that \(D^\beta _\eta\) is a differential operator of any order, such as \(0 < \beta \le 1\). Then conformable fractional derivative of \(v(\eta )\) is given by
Following are some characteristics of conformable fractional derivative:
Theorem 1
Suppose that function \(v(\eta )\) and \(w(\eta )\) are \(\beta -\)differentiable at \(\eta >0\) with \(\beta \in (0,1]\), therefore
Theorem 2
Assume that \(v(\eta )\) is both differentiable and sigma-differentiable in the range \(\beta \in (0, 1]\). Furthermore, let \(v(\eta )\) be a differentiable function with the same range \(v(\eta )\),
3 Mathematical formulation of the methods
The solution of NLPDEs is often difficult and frequently necessitates advanced mathematical techniques. NLPDEs can be solved using a variety of strategies, including analytical, semi-analytical, and numerical techniques. Analytical approaches, such as variable separation and perturbation methods, are restricted to certain types of NLPDEs and idealised conditions. Semi-analytical methods, such as homotopy analysis and variational iteration, combine analytical and numerical techniques to generate approximate solutions. Numerical methods, such as finite difference, finite element, and spectral methods, are extensively exercised for solving NLPDEs as they can handle complex geometries and boundary conditions. However, numerical approaches necessitate high computational resources and may suffer from numerical errors. Moreover, selecting an suitable method for solving a particular NLPDE is often dependent on the nature of the problem, the complexity of the PDE, and the preferred accuracy of the solution. Therefore, choosing a proficient and accurate method is decisive for solving NLPDEs and advancing scientific research and technological innovation.
Take into account the nonlinear partial differential (NLPD) equation.
where the polynomial R in g(x, t) has partial derivatives that constitute its highest derivatives plus a nonlinear term and g(x, t) is an undefined function. The following phases tell the story of the improved F-expansion and the unified methods contexts.
The wave variables with the formula \(g(x,t)=v(\xi )\), where \(\xi =x - \frac{t^\beta }{\beta }c\) (where c denotes the speed of the traveling wave), are presumably acceptable for transformation into nonlinear form (3).
3.1 The improved F-expansion method
The circumstances for the improved F-expansion method are described in the following phases.
Step-1: The solution of Eq. (4) is presumable in the form that follows the improved F-expansion method.
where either \(\mu _i\) or \(\rho _i\) may be zero, but neither may be zero simultaneously. \(\rho _i (i=1,2,3,\ldots ,N)\) and n are fictitious factors that will eventually be chosen, along with \(\mu _i(i=0,1,2,\ldots ,N)\). We consider about popular Riccati equation.
where p represents the real part of the equation and the prime represents derivatives with respect to \(\xi\). The three general solutions of the Riccati equation Eq. (6) are follows as
Case-I: If\(p <0\), then the general solutions are
Case-II: If \(p >0\), textitCasethen the general solutions are
Case-III: If \(p=0\), then the general solution is
Step-2: The balancing principal is used to gain the value of N come out the solution of Eq. (4).
Step-3: With the help of equation Eq. (5) togather with Eq. (6) in Eq. (4), it is possible to calculate the polynomial in \(F(\xi )\). An algebraic system of equations is therefore produced when the same index of \(F(\xi )\) is equal to zero. By using Mathematica to solve these equations, we can get the values of the unknowns \(\mu _i, \rho _ i\), p, and n, which will be utilized to obtain the answer to equation Eq. (3).
3.2 The unified method
Step-1: The nonlinear equation (3) is considered to have a solution in the following form, in accordance with the unified framework.
Here, the variables \(a_0\), \(a_ i\), and \(b_ i\) are unknowns that will be known later, but they cannot both zero simultaneously. Riccati equation is satisfied by F and its derivative.
where \(\Omega\) refers to a real component and prime stands for derivatives with regard to \(\xi .\) Case-I: If \(\Omega <0\), then the general solutions are
Case-II: If \(\Omega >0\), then the general solutions are
Case-III: If \(\Omega =0\), then the general solution is
Where f is an arbitrary constant and d and e are real arbitrary constants.
Step-2 The balancing principal is used to gain the value of N come out the solution of Eq. (4).
Step-3 With the help of Eq. (13) and the solution Eq. (12), it is possible to calculate the polynomial in \(F(\chi )\). The same index of \(F(\xi )\) then equals zero, yielding an algebraic system of equations. By using Mathematica 13.0 to solve these equations, to get the values of the unknowns \(a_i, b_i, p,~ and~ c\), which will be used to get the solution of Eq. (3).
4 Extraction of solutions
This section demonstrates how well the improved F-expansion method and unified method to get the solitary wave solutions of Eq. (1). The wave transformation is defines as:
Inserting Eqs. (19) and (6) into Eq. (1), then the real and imaginary components are Re :
Im :
The imaginary part yielding the following result
Inserting Eq. (22) into Eq. (21), one can get the following form of ODE:
4.1 Application of improved F-expansion method
For the requirement of the improved F-expansion method, follow the balancing principal of terms \(V{''}\) and \(V^3\) in Eq. (23), we gain \(N=1\). Then from Eq. (5) we get,
where \(\mu ,~\rho\) and n are constants. When Eq. (24) is plugged into Eq. (23), we get a system of algebraic equations correspond to coefficients of \(V(\xi )\) equating to zero. By simplifying these algebraic equations, novel clusters of solutions for Eq. (1) are gained.
Set-1
When \(p<0\), the solutions are
Family 1:

3D, 2D graphs of Eq. (26)
Family 2:
When \(p>0\), the solutions are
Family 3:
Family 4:
When \(p=0\), the solutions are
Family 5:

3D, 2D graphs of Eq. (29)
Set-2
When \(p<0\), the solutions are
Family 1:
Family 2:
When \(p>0\), the solutions are
Family 3:

3D, 2D graphs of Eq. (33)
Family 4:
When \(p=0\), the solutions are
Family 5:
Set-3
When \(p<0\), the solutions are
Family 1:
Family 2:
When \(p>0\), the solutions are
Family 3:

3D, 2D graphs of Eq. (38)
Family 4:
When \(p=0\), the solutions are
Family 5:
4.2 Application of the unified method
For the requirement of the unified method, follow the balancing principal of terms \(V{''}\) and \(V^3\) in Eq. (23), we gain \(N=1\). Then from Eq. (12) we get,
where \(a_0,~a_1\) and \(b_1\) are constants. When Eq. (43) is plugged into Eq. (23), we obtain a system of algebraic equations correspond to coefficients of \(V(\xi )\) equating to zero. By simplifying these algebraic equations, novel clusters of solutions for Eq. (1) are gained.
Set-1
When \(\Omega <0\), the solutions are
Family 1:
Family 2:
When \(\Omega >0\), the solutions are
Family 3:
Family 4:
When \(\Omega =0\), the solutions are
Family 5:
For set-1: \(\xi =x-\frac{2 \nu t^{\beta }}{\beta },~~\psi =\frac{\left( 12 \Omega -\frac{5}{54 \alpha ^2}\right) t^{\beta }}{\beta }+\nu x.\)
Set-2
When \(\Omega <0\), the solutions are
Family 1:

3D, 2D graphs of Eq. (46)
Family 2:
When \(\Omega >0\), the solutions are
Family 3:

3D, 2D graphs of Eq. (41)
Family 4:
When \(\Omega =0\), the solutions are
Family 5:
For set-2: \(\xi =x-\frac{2 \nu t^{\beta }}{\beta },~~\psi =\frac{t^{\beta } \left( -\frac{5}{54 \alpha ^2}+5 a_0^2-\frac{3}{a_0}+6 \Omega \right) }{\beta }+\nu x.\)
5 Stability analysis
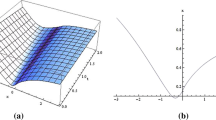
Numerous nonlinear processes exhibit an instability in the modulation of the steady-state as a result of the interaction of the nonlinear and dispersive effects. Examining the equation’s modulation instability (MI) (Shehata 2010; Rehman and Ahmad 2023; Houwe et al. 2021; Ismael et al. 2021; Yépez-Martínez et al. 2022; Ismael et al. 2023; Sylvere et al. 2023) through linear stability technique is the main goal of the study in this part.
Assuming the FSH equation has following steady-state solutions
where \(\lambda\) signifies for normalized optical power.
Plugging Eq. (56) into Eqs. (1). We earn
where \(*\) stands for the conjugate.
Let Eq. (57) has solution of the form as
where \(p_{1}\) and \(p_{2}\) stands for the normalized wave number, while frequency of perturbation represented by \(\varpi\).
Embedding Eq. (58) into Eq. (57), separating the coefficients of \(e^{i(\eta x+\varpi \frac{t^{\beta }}{\beta })}\) and \(e^{-i(\eta x+\varpi \frac{t^{\beta }}{\beta })}\), and solving the determinant of the coefficient matrix, we get the following dispersion relation:
Evaluating the dispersion relation (59) for \(\varpi\), imparts
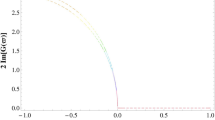
The stability of the steady state is shown by the dispersion relation that was attained. The steady state appears to be stable against tiny dispersion when the wave number \(\varpi\) has a real component. When the wave number is imaginary, the steady state becomes unstable and the perturbation increases exponentially. Under this condition, the growth rate is:
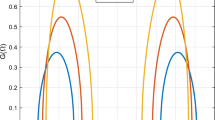
Lastly, the gain spectrum \(G(\lambda )\) is calculated as

Modulation Instability regions for distinct values of \(\alpha =\{0.2,0.4,0.6\},~\alpha =\{0.15,0.2,0.25\}\) from left to right, respectively

Modulation Instability regions for distinct values of \(\alpha =\{0.1,0.2,0.3\},~\alpha =\{0.11,0.21,0.31\}\) from left to right, respectively

Modulation Instability regions for distinct values of \(\alpha =\{0.2,0.4,0.6\},~\alpha =\{0.5,0.6,0.7\}\) from left to right, respectively

Modulation Instability regions for distinct values of \(\alpha =\{0.2,0.4,0.6\},~\alpha =\{0.55,0.65,0.75\}\) from left to right, respectively
6 Results and discussion
In this section, the originality and novelty of present work is demonstrated by a detailed comparison of the obtained solutions with the previous ones. Odabasi Koprulu constructed multi-solitons in the form of singular, dark, and bright by applying direct method and trial equation method (Odabasi Koprulu 2022). But in this study we have computed various solutions in the forms of dark, rational, singular, hyperbolic, trignometric and periodic wave solutions by manipulating two mathematical methods improved F-expansion method and the unified method. Several of our outcomes diverge from those mentioned in Odabasi Koprulu (2022) if we compare our achievements with their results. Even so, if we give various values to the components involved, we can obtain some similar outcomes. This present study differs from others in that it assessed the impact that parameters of the model have on the actions of solitons, despite the fact that the proposed techniques were applied for the first time on the model under investigation and several soliton were created. This study focuses on the influence of model parameters on solitons behavior. This study offers numerous innovative optical soliton solutions for the NLCFSH dynamical model. The soliton solutions are constructed via powerful analytical methods, which are the improved F-expansion method, the unified method and the effectiveness of the employed schemes demonstrates their strength and superiority over other applied analytical procedures. The physical implications of the extracted wave solutions for the specific values of the resultant parameters are illustrated graphically and the internal structure of the connected physical phenomena is analyzed in Figs. 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11 and 12. These kinds of solutions may be useful to explain some physical phenomena related to wave propagation in a nonlinear Schrödinger system supporting high-order nonlinear and dispersive effects. Here, we provide some 3-dimensional and 2-dimensional plots of the obtained solutions in Figs. 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11 and 12. Figure 1 simulates the dark behavior Eq. (26) with arbitrary parameter values for \(p=-0.7,~n=2.1,~m=1.3,~\alpha =0.2\). The Fig. 2 represents the periodic behavior Eq. (29) by choosing the arbitrary parameter values for \(p=0.8,~n=0.5,~m=1.3,~\alpha =0.2,~\beta =0.1\). The Fig. 3 demonstrates the dark behavior of Eq. (33) with arbitrary parameter values for \(p=-0.6,~\mu _1=1.8,~\nu =0.9,~m=-0.7\). The Fig. 4 represents the dark behavior of Eq. (38) with arbitrary parameter values for \(p=-0.34,~\nu =0.84,~m=2,~n=1\). The Fig. 6 shows the periodic behavior Eq. (41) with arbitrary parameter values for \(p=2.5,~m=0.34,~n=0.2,~\nu =2.34\). The Fig. 5 illustrates the hyperbolic behavior Eq. 46 with arbitrary parameter values for \(\Omega =-0.01,~d=0.19,~e=1.4,~f=0.4,~c=1.07,~\alpha =0.2,~m=1.21\). The Fig. 11 shows the periodic behavior Eq. (53) with arbitrary parameter values for \(\Omega =0.6,~d=0.19,~e=0.4,~f=0.7,~c=1.07,~\alpha =-1.2,~m=1.1,~a_0=0.3\). The Fig. 12 represents the trigonometric behavior Eq. (54) with arbitrary parameter values for \(\Omega =0.5,~d=0.019,~e=-0.4,~f=0.07,~c=1.09,~\alpha =1.2,~m=-1.01,~a_0=0.6\). The wave profiles of the obtained solutions have been sketched for various values of \(\beta\) to demonstrate the effect of the fractional derivative on the dynamic behavior of the waves. From the figures, it is observed that the fractional order has a significant impact on the characteristics of the wave profiles via the memory effect phenomenon, which means that the signal takes into account its past evolution at any point; acting on this parameter allows having better and more complete information about the shape of a signal or a pulse. The soliton has the ability to keep its amplitude, velocity, and form constant throughout its propagation. These reported solutions have some physical meaning for instance dark soliton is a soliton whose intensity is lower than the background and which isn’t produced by a typical pulse but rather is basically devoid of energy in a continuous time beam. There are further types of solitary waves called singular solitons that have singularities, typically infinite discontinuities. Singular solitons might be linked to solitary waves when the location of the center of the solitary wave is imaginary. Therefore, discussing the topic of singular solitons is relevant. This type of solution contains spikes and therefore may recommend a description for the development of rogue waves. Periodic wave solution describes a wave with repeating continuous pattern, which determines its wavelength and frequency, while period defines as time required to complete cycle of waveform and frequency is a number of cycles per second of time. The regions of gain curves versus the angular frequency with the effect of the dispersion and fractional derivative order have been exemplified in figures 7, 8, 9 and 10. We observe that, when the fractional derivative order decreases, the MI band increases and the instability zones also increase.

3D, 2D graphs of Eq. (53)

3D, 2D graphs of Eq. (54)
7 Conclusion
In this article, we provided several new solutions for the fractional Schrödinger–Hirota (FSH) equation with conformable fractional derivative, which is well known for playing a crucial role in optical fiber communication between continents as well as the telecommunication industry. By using the improved F-expansion and unified method, we have successfully secured several new solitons of the Eq. (1). Several notable oceanic phenomena related to nonlinear shallow or deep water wave propagation have been elucidated in terms of soliton propagation. A number of significant optical solitons, including dark optical, singular optical, mixed singular optical, and periodic function solutions, have been recovered. It has been demonstrated that these techniques are quite successful in exposing the different soliton solutions of our selected model. To observe the internal structure of the solutions to nonlinear phenomena, researchers may use and develop many new approaches. In this way, you can find novel solutions to the dynamical models under consideration. Studying these innovative solution characteristics significantly enhances the physical realisation of wave phenomena in higher-dimensional fractional dynamical models in nonlinear optics and oceanography. The responses of the soliton solutions of the govering models can be evaluated in the future by adding the bifurcation and chaotic behaviors of FSH equation, and a new debate ground can be formed.
Data availability
Data sharing not applicable to this article as no datasets were generated or analysed during the current study.
References
Abaid van Rehman, M., Ahmad, J., Hassan, A., Awrejcewicz, J., Pawlowski, W., Karamti, H., Alharbi, F.M.: The dynamics of a fractional-order mathematical model of cancer tumour disease. Symmetry 14, 1694 (2022)
Adeyemo, O.D., Khalique, C.M.: Analytic solutions and conservation laws of a (2+ 1)-dimensional generalized Yu–Toda–Sasa–Fukuyama equation. Chin. J. Phys. 77, 927–944 (2022)
Adeyemo, O.D., Zhang, L., Khalique, C.M.: Bifurcation theory, lie group-invariant solutions of subalgebras and conservation laws of a generalized (2+ 1)-dimensional BK equation type II in plasma physics and fluid mechanics. Mathematics 10(14), 2391 (2022)
Aggarwal, S., Sharma, N., Chauhan, R.: Application of Kamal transform for solving linear Volterra integral equations of first kind. Int. J. Res. Advent Technol. 6(8), 2081–2088 (2018)
Akbar, M.A., Kayum, M.A., Osman, M.S., Abdel-Aty, A.H., Eleuch, H.: Analysis of voltage and current flow of electrical transmission lines through mZK equation. Results Phys. 20, 103696 (2021)
Akbar, M.A., Wazwaz, A.M., Mahmud, F., Baleanu, D., Roy, R., Barman, H.K., Osman, M.S.: Dynamical behavior of solitons of the perturbed nonlinear Schrödinger equation and microtubules through the generalized Kudryashov scheme. Results Phys. 43, 106079 (2022)
Akbulut, A., Islam, R., Arafat, Y., Taşcan, F. A novel scheme for SMCH equation with two different approaches. Comput. Methods Differ. Equ. (2022)
Akinyemi, L., Morazara, E.: Integrability, multi-solitons, breathers, lumps and wave interactions for generalized extended Kadomtsev–Petviashvili equation. Nonlinear Dyn. 1–25 (2022)
Anjum, N., He, J.H.: Laplace transform: making the variational iteration method easier. Appl. Math. Lett. 92, 134–138 (2019)
Bakodah, H. O., Banaja, M. A., Alshaery, A. A., Al Qarni, A. A. Numerical solution of dispersive optical solitons with Schrödinger-Hirota equation by improved Adomian decomposition method. Math. Probl. Eng. (2019)
Bernstein, I., Zerrad, E., Zhou, Q., Biswas, A., Melikechi, N.: Dispersive optical solitons with Schrödinger-Hirota equation by traveling wave hypothesis. Optoelectron. Adv. Mater. Rapid Commun. 9, 792–797 (2015)
Biazar, J., Ayati, Z.: Improved G’/G-expansion method and comparing with tanh–coth method. Appl. Appl. Math. Int. J. (AAM) 6(1), 20 (2011)
Bilal, M., Ur-Rehman, S., Ahmad, J.: Lump-periodic, some interaction phenomena and breather wave solutions to the (2+ 1)-r th dispersionless Dym equation. Mod. Phys. Lett. B 36(02), 2150547 (2022). https://doi.org/10.1142/S0217984921505473
Bilal, M., Ur-Rehman, S., Ahmad, J.: Dynamics of diverse optical solitary wave solutions to the Biswas–Arshed equation in nonlinear optics. Int. J. Appl. Comput. Math. 8(3), 137 (2022)
Biswas, A., Jawad, A.J.A.M., Manrakhan, W.N., Sarma, A.K., Khan, K.R.: Optical solitons and complexitons of the Schrödinger-Hirota equation. Opt. Laser Technol. 44(7), 2265–2269 (2012)
Cheng, X., Hou, J., Wang, L.: Lie symmetry analysis, invariant subspace method and q-homotopy analysis method for solving fractional system of single-walled carbon nanotube. Comput. Appl. Math. 40(4), 1–17 (2021)
Chukkol, Y.B., Mohamad, M.N., Muminov, M.I.: Exact solutions to the KDV-Burgers equation with forcing term using Tanh–Coth method. AIP Conf. Proc. 1870, 040024 (2017). https://doi.org/10.1063/1.4995856
Dusunceli, F., Celik, E., Askin, M., Bulut, H.: New exact solutions for the doubly dispersive equation using the improved Bernoulli sub-equation function method. Indian J. Phys. 95, 309–314 (2021)
El-Sayed, Z.E.S.M., Al-Nowehy, A.G.: Exact traveling wave solutions for nonlinear PDEs in mathematical physics using the generalized Kudryashov method. Serbian J. Electr. Eng. 13(2), 203–227 (2016)
Eslami, M., Rezazadeh, H., Rezazadeh, M., Mosavi, S.S.: Exact solutions to the space-time fractional Schrödinger-Hirota equation and the space-time modified KDV-Zakharov-Kuznetsov equation. Opt. Quantum Electron. 49, 1–15 (2017)
Fendzi-Donfack, E., Tala-Tebue, E., Inc, M., Kenfack-Jiotsa, A., Nguenang, J.P., Nana, L.: Dynamical behaviours and fractional alphabetical-exotic solitons in a coupled nonlinear electrical transmission lattice including wave obliqueness. Opt. Quantum Electron. 55(1), 1–25 (2023)
Gao, W., Rezazadeh, H., Pinar, Z., Baskonus, H.M., Sarwar, S., Yel, G.: Novel explicit solutions for the nonlinear Zoomeron equation by using newly extended direct algebraic technique. Opt. Quantum Electron. 52(1), 1–13 (2020)
Houwe, A., Abbagari, S., Nisar, K.S., Inc, M., Doka, S.Y.: Influence of fractional time order on W-shaped and modulation instability gain in fractional nonlinear Schrödinger equation. Results Phys. 28, 104556 (2021)
Hu, L., Han, L., Xu, Z., Jiang, T., Qi, H.: A disk failure prediction method based on LSTM network due to its individual specificity. Procedia Comput. Sci. 176, 791–799 (2020)
Hubert, M.B., Betchewe, G., Justin, M., Doka, S.Y., Crepin, K.T., Biswas, A., Belic, M.: Optical solitons with Lakshmanan–Porsezian–Daniel model by modified extended direct algebraic method. Optik 162, 228–236 (2018)
Hussain, S., Shah, A., Ullah, A., Haq, F.: The q-homotopy analysis method for a solution of the Cahn-Hilliard equation in the presence of advection and reaction terms. J. Taibah Univ. Sci. 16(1), 813–819 (2022)
Islam, Z., Abdeljabbar, A., Sheikh, M.A.N., Taher, M.A.: Optical solitons to the fractional order nonlinear complex model for wave packet envelope. Results Phys. 43, 106095 (2022)
Ismael, H.F., Bulut, H., Baskonus, H.M., Gao, W.: Dynamical behaviors to the coupled Schrödinger–Boussinesq system with the beta derivative. AIMS Math. 6(7), 7909–7928 (2021)
Ismael, H.F., Akkilic, A.N., Murad, M.A.S., Bulut, H., Mahmoud, W., Osman, M.S.: Boiti–Leon–Manna–Pempinelli equation including time-dependent coefficient (vcBLMPE): a variety of nonautonomous geometrical structures of wave solutions. Nonlinear Dyn. 110(4), 3699–3712 (2022)
Ismael, H.F., Baskonus, H.M., Bulut, H., Gao, W.: Instability modulation and novel optical soliton solutions to the Gerdjikov–Ivanov equation with M-fractional. Opt. Quantum Electron. 55(4), 303 (2023)
Jisha, C.R., Dubey, R.K.: Wave interactions and structures of (4+ 1)-dimensional Boiti–Leon–Manna–Pempinelli equation. Nonlinear Dyn. 110(4), 3685–3697 (2022)
Kilic, B., Inc, M.: Optical solitons for the Schrödinger-Hirota equation with power law nonlinearity by the Bäcklund transformation. Optik 138, 64–67 (2017)
Kumar, S., Mohan, B.: A novel and efficient method for obtaining Hirota’s bilinear form for the nonlinear evolution equation in (n+ 1) dimensions. Partial Differ. Equ. Appl. Math. 5, 100274 (2022)
Li, C., Chen, L., Li, G.: Optical solitons of space-time fractional Sasa–Satsuma equation by F-expansion method. Optik 224, 165527 (2020). https://doi.org/10.1016/j.ijleo.2020.165527
Manafian, J.: Variety interaction solutions comprising lump solitons for a generalized BK equation by trilinear analysis. Eur. Phys. J. Plus 136(10), 1–24 (2021)
Mirhosseini-Alizamini, S.M., Rezazadeh, H., Eslami, M., Mirzazadeh, M., Korkmaz, A.: New extended direct algebraic method for the Tzitzica type evolution equations arising in nonlinear optics. Comput. Methods Differ. Equ. 8(1), 28–53 (2022)
Modanli, M., Abdulazeez, S.T., Husien, A.M.: A residual power series method for solving pseudo hyperbolic partial differential equations with nonlocal conditions. Numer. Methods Partial Differ. Equ. 37(3), 2235–2243 (2021)
Mungkasi, S.: Variational iteration and successive approximation methods for a SIR epidemic model with constant vaccination strategy. Appl. Math. Model. 90, 1–10 (2021)
Nadeem, M., He, J.H.: He–Laplace variational iteration method for solving the nonlinear equations arising in chemical kinetics and population dynamics. J. Math. Chem. 59(5), 1234–1245 (2021)
Noeiaghdam, S., Sidorov, D., Wazwaz, A.M., Sidorov, N., Sizikov, V.: The numerical validation of the Adomian decomposition method for solving Volterra integral equation with discontinuous Kernels using the CESTAC method. Mathematics 9(3), 260 (2021)
Odabasi Koprulu, M.: Dynamical behaviours and soliton solutions of the conformable fractional Schrödinger-Hirota equation using two different methods. J. Taibah Univ. Sci. 16(1), 66–74 (2022)
Qazza, A., Burqan, A., Saadeh, R.: Application of ARA-residual power series method in solving systems of fractional differential equations. Math. Probl. Eng. (2022)
Ray, S.S.: Dispersive optical solitons of time-fractional Schrödinger-Hirota equation in nonlinear optical fibers. Phys. A Stat. Mech. Appl. 537, 122619 (2020). https://doi.org/10.1016/j.physa.2019.122619
Rehman, S.U., Ahmad, J.: Dynamics of optical and other soliton solutions in fiber Bragg gratings with Kerr law and stability analysis. Arab. J. Sci. Eng. 48(1), 803–819 (2023)
Rehman, S.U., Bilal, M., Ahmad, J.: The study of solitary wave solutions to the time conformable Schrödinger system by a powerful computational technique. Opt. Quantum Electron. 54(4), 228 (2022)
Rezazadeh, H., Mirhosseini-Alizamini, S.M., Eslami, M., Rezazadeh, M., Mirzazadeh, M., Abbagari, S.: New optical solitons of nonlinear conformable fractional Schrödinger-Hirota equation. Optik 172, 545–553 (2018)
Samir, I., Arnous, A.H., Yıldırım, Y., Biswas, A., Moraru, L., Moldovanu, S.: Optical solitons with cubic-quintic-septic-nonic nonlinearities and quadrupled power-law nonlinearity: an observation. Mathematics 10(21), 4085 (2022)
Sardar, A., Ali, K., Rizvi, S.T.R., Younis, M., Zhou, Q., Zerrad, E., Bhrawy, A.: Dispersive optical solitons in nanofibers with Schrödinger-Hirota equation. J. Nanoelectron. Optoelectron. 11(3), 382–387 (2016)
Shehata, A.R.: The traveling wave solutions of the perturbed nonlinear Schrödinger equation and the cubic-quintic Ginzburg Landau equation using the modified \((\frac{G^{\prime }}{G})\)-expansion method. Appl. Math. Comput. 217(1), 1–10 (2010)
Sulaiman, T.A., Younas, U., Younis, M., Ahmad, J., Rehman, S.U., Bilal, M., Yusuf, A.: Modulation instability analysis, optical solitons and other solutions to the (2+ 1)-dimensional hyperbolic nonlinear Schrodinger’s equation. Comput. Methods Differ. Equ. 10(1), 179–190 (2022)
Sylvere, A.S., Justin, M., David, V., Joseph, M., Betchewe, G.: Impact of fractional effects on modulational instability and bright soliton in fractional optical metamaterials. Waves Random Complex Media 33(2), 414–427 (2023)
Tang, L.: Bifurcations and dispersive optical solitons for the nonlinear Schrödinger-Hirota equation in DWDM networks. Optik 262, 169276 (2022). https://doi.org/10.1016/j.ijleo.2022.169276
Tanwar, D.V., Wazwaz, A.M.: Lie symmetries and exact solutions of KdV-Burgers equation with dissipation in dusty plasma. Qual. Theory Dyn. Syst. 21(4), 1–22 (2022)
Veeresha, P., Baskonus, H.M., Gao, W.: Strong interacting internal waves in rotating ocean: novel fractional approach. Axioms 10(2), 123 (2021a)
Veeresha, P., Yavuz, M., Baishya, C.: A computational approach for shallow water forced Korteweg–De Vries equation on critical flow over a hole with three fractional operators. Int. J. Optim. Control Theor. Appl. (IJOCTA) 11(3), 52–67 (2021b)
Wazwaz, A.M., Alatawi, N.S., Albalawi, W., El-Tantawy, S.A.: Painlevé analysis for a new (3+ 1)-dimensional KP equation: multiple-soliton and lump solutions. Europhys. Lett. 140(5), 52002 (2022)
Yao, S.W., Ilhan, E., Veeresha, P., Baskonus, H.M.: A powerful iterative approach for quintic complex Ginzburg–Landau equation within the frame of fractional operator. Fractals 29(05), 2140023 (2021)
Yépez-Martínez, H., Rezazadeh, H., Inc, M., Houwe, A., Jerôme, D.: Optical solitons of the fractional nonlinear Sasa–Satsuma equation with third-order dispersion and with Kerr nonlinearity law in modulation instability. Opt. Quantum Electron. 54(12), 804 (2022)
Younas, U., Sulaiman, T.A., Ren, J.: On the study of optical soliton solutions to the three-component coupled nonlinear Schrödinger equation: applications in fiber optics. Opt. Quant. Electron. 55(1), 1–11 (2023)
Yusuf, A., Sulaiman, T.A., Alshomrani, A.S., Baleanu, D.: Breather and lump-periodic wave solutions to a system of nonlinear wave model arising in fluid mechanics. Nonlinear Dyn. 110(4), 3655–3669 (2022)
Zafar, A., Raheel, M., Asif, M., Hosseini, K., Mirzazadeh, M., Akinyemi, L.: Some novel integration techniques to explore the conformable M-fractional Schrödinger-Hirota equation. J. Ocean Eng. Sci. 7(4), 337–344 (2022)
Zhao, X., Pang, F., Gegen, H.: Interactions among two-dimensional nonlinear localized waves and periodic wave solution for a novel integrable \((2+ 1)\)-dimensional KdV equation. Nonlinear Dyn. 110(4), 3629–3654 (2022)
Zulfiqar, A., Ahmad, J. Computational solutions of fractional (2+1)-dimensional Ablowitz–Kaup–Newell–segur equation using an analytic method and application. Arab. J. Sci. Eng. 1–15 (2021)
Acknowledgements
Not applicable.
Funding
The authors have not disclosed any funding.
Author information
Authors and Affiliations
Contributions
SA: Conceptualization, Methodology, Writing— original draft, Formal analysis, Software. JA: Resources, Supervision, Validation, acquisition. SUR: Formal analysis, Investigation, Software, Validation. TY: Writing—original draft, Formal analysis.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no conflict of interest. The authors have no relevant financial or non-financial interests to disclose.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Akram, S., Ahmad, J., Rehman, S.U. et al. Stability analysis and dispersive optical solitons of fractional Schrödinger–Hirota equation. Opt Quant Electron 55, 664 (2023). https://doi.org/10.1007/s11082-023-04942-2
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11082-023-04942-2