
Abstract
The purpose of this work is to seek various innovative exact solutions using the new Kudryashov approach to the nonlinear partial differential equations (NLPDEs). This technique obtains novel exact solutions of soliton types. Moreover, several 3D and 2D plots of the higher dimensional Klein-Gordon, Kadomtsev-Petviashvili, and Boussinesq equations are demonstrated by considering the relevant values of the aforementioned parameters to exhibit the nonlinear wave structures more adequately. The new Kudryashov technique is an effective, and simple technique that provides new generalized solitonic wave profiles. It is anticipated that these novel solutions will enable a thorough understanding of the development and dynamic nature of such models.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
NLPDEs play a crucial and practical role in many branches of technology, science, and theoretical physics Yépez-Martínez et al. (2022), Akinyemi et al. (2022), Arqub et al. (2020), Mohamed and El-Sherif (2010), Jeragh et al. (2007), Osman (2019), Osman et al. (2020), Aljahdali et al. (2013), Akinyemi et al. (2022), Houwe et al. (2022), Osman and Ghanbari (2018), Osman et al. (2019). Numerous scientists have developed cutting-edge methods for obtaining precise solutions to the myriad fascinating nonlinear models that appear in contemporary science Nisar et al. (2022), Abbagari et al. (2022), Arqub et al. (2022), Osman and Wazwaz (2019). An essential subject in the research of nonlinear phenomena is the development of analytical solutions for NLPDEs Rezazadeh et al. (2021), Tarla et al. (2022), Chu et al. (2021), Jin et al. (2022).
Many effective methods for handling these models have been employed in the present era of practical science and engineering, such as the Hirota’s bilinear transform approach Kumar and Mohan (2021), Özkan et al. (2022), exp-function method Nisar et al. (2021), Gepreel and Zayed (2021), the unified method and its generalized form Osman (2017), Wazwaz and Osman (2018), Osman (2016), the technique of Kudryashov Tarla et al. (2022), Malik et al. (2021), Sain et al. (2021), Dan et al. (2020), the soliton ansatz method Fan and Hona (2002), Savescu et al. (2014), the improved trial equation method Zhou et al. (2016), Günerhan et al. (2020), invariant subspace method Hashemi (2018, 2021), and Lie symmetry method Malik et al. (2021), Hu and Li (2022), Kumar et al. (2021, 2022). Over the past few decades, one of the most fascinating areas of current research has been the study of the solitonic and optical behaviour of nonlinear models Zayed and Arnous (2013); our perspective is still applicable even though the provided model suggests additional odd order partial derivative terms El-Shiekh and Al-Nowehy (2013).
In the past few years, many efficient studies were done to typify the soliton solutions for different complicated nonlinear differential equations, including the extended sinh- and sine-Gordon equation expansion approach Baskonus et al. (2018), Ali et al. (2020), the extended Jocobi’s elliptic approach Hong and Lu (2009), Tarla et al. (2022a, 2022b), the modified auxiliary equation mapping method Cheemaa et al. (2020), the modify extended direct algebraic technique Yaro et al. (2020), the inverse scattering transformation method Zhang and Chen (2019), the extended rational sine-cosine method Mahak and Akram (2019), semi-inverse variational principle Kohl et al. (2020) and many more Hosseini et al. (2020), Kudryashov (2020), Qureshi et al. (2022), Arqub et al. (2022), Rashid et al. (2022), Adel et al. (2022), Ismael et al. (2022), Yao et al. (2022). The main object of this study is to use the new Kudryashov approach Tarla et al. (2022), Malik et al. (2021), Sain et al. (2021), Dan et al. (2020) to analyze three different important models namely: the (1+1)-dimensional Klein-Gordan equation (1D-KGE) Opanasenko and Popovych (2020), Chargui et al. (2010), the (2+1)-dimensional Kadomtsev-Petviashvili equation (2D-KPE) Gai et al. (2016), Alharbi et al. (2020), and the (3+1)-dimensional Boussinesq equation (3D-BE) Wazwaz and Kaur (2019), Hu and Li (2022) by finding their analytical solutions and discuss their behaviors graphically through some 3D and 2D charts.
This article is devised as follows: in Sect. 2, the new Kudryashov method is introduced. Section 3, deals with the solution of 1D-KGE by using the new Kudryashov technique. In Sect. 4, this method is utilized for extracting exact solutions of the 2D-KPE. Solitons of the 3D-BE is considered in Sect. 5. The last section, contains some conclusions and final remarks.
2 The new Kudryashov method
Assume the next NLPDE:
where \(\Omega\) simply represents a polynomial. Using another transformation of the form
where \(\sigma\) represents the speed of wave. Rewriting Eq. (2) as the following nonlinear ODE
Consider (3) has a solution as:
where \(c_{i}, (i=0,1,\dots ,N)\) are the coefficients of \(Q^{i}(\vartheta )\) with \(c_{N} \ne 0\) and \(Q(\vartheta ) = \dfrac{1}{a A^{\Theta \vartheta } + b A^{-\Theta \vartheta }}\) is the solution of
where the constants \(a,\,b,\,\Theta\) and A are non-zero, with \(A>0\) and \(A \ne 1\).
Here we will find N by the classical balance procedure and then putting Eq. (4) into Eq. (3). Since \(Q(\vartheta ) \ne 0\), and we equated all the coefficients of \(Q^{i}(\vartheta )\) to zero. Then, this system is solved for a, b and \(c_{i}\)’s. Whenever a, b and \(c_{i}\)’s are determined, then solutions are obtained with the help of parameters by using the explicit strategy. Then by substitution of \(\vartheta = x - \sigma t\) into the solutions satisfying (5), the procedure is going to end.
3 The (1+1)-dimensional Klein–Gordan equation Opanasenko and Popovych (2020), Chargui et al. (2010)
where \(u=u(x,t)\) is the unknown function with a real value that results from the real independent variables x and t, and \(q,\,s\) are real constants. The 1D-KGE is a relativistic wave equation, related to the Schrödinger equation. Opanasenko and Popovych Opanasenko and Popovych (2020) have described generalized symmetries and local conservation laws for the 1D-KGE. Furthermore, Chargui et al. (2010) solved Eq. (6) in one spatial dimension for the case of mixed scalar and vector linear potentials in the context of deformed quantum mechanics characterized by a finite minimal uncertainty in position.
Assuming that Eq. (6) has a traveling wave
where \(\sigma\) is wave velocity. Inserting (7) in (6), we get the following nonlinear ODE:
Balancing the terms \(U_{\vartheta \vartheta }\) and \(U^{3}\) to get \(N = 1\). By substituting \(N = 1\) in to (4) to get
Substituting (9) in (8) and equate the coefficient of \(Q(\vartheta )\) yields
Solving the above system, we get
By substituting (11) in to (9), we recover this exact solution
where \(\vartheta = x - {\dfrac{\sqrt{-q+{\Theta }^{2} \left( \ln \left( A \right) \right) ^{2}}}{\Theta \,\ln \left( A \right) }}t\).

4 The (2+1)-dimensional Kadomtsev–Petviashvili equation Gai et al. (2016), Alharbi et al. (2020)
where \(u=u(x,y,t)\) is the unknown function with a real value that results from the real independent variables x, y, and t and It is used to describe the plasma’s electrostatic wave potential or the fluid’s shallow-water wave amplitude. Gai et al. (2016) used three different analytical techniques namely: the Lie symmetry, the extended tanh and the homotopy perturbation methods to investigate some exact and approximate solutions for the 2D-KPE. The \(\exp (\phi (\eta ))\)-expansion method is used by Alharbi et al. (2020) to find a variety of exact solutions with different wave structures for Eq. (13) and they discussed the stability of the obtained solutions via the commonly used form of the Hamiltonian system.
Assume that Eq. (13) has a traveling wave solution
where \(\sigma\) is wave velocity. Using (14) in (13), we get the following nonlinear ODE:
Then, with respect to \(\vartheta\), integrate equation (15) twice and simplify to get
with integral constants treating as zero. Balancing the terms \(U_{\vartheta \vartheta }\) and \(U^{2}\) to get \(N = 2\). By substituting \(N = 2\) in to (4) to get
Substituting (17) in (16) and equate the coefficient of \(Q(\vartheta )\) to zero yields
Following the aforementioned system’s solution, we obtain the sets:
Set 1:
By substituting (19) in to (14), we recover this exact solution
where \(\vartheta = x + \omega y - \left( {\omega }^{2}+4\,{\Theta }^{2} \left( \ln \left( A \right) \right) ^{2}\right) t\).
Set 2:
By substituting (21) in to (14), we recover this exact solution
where \(\vartheta = x + \omega y - \left( {\omega }^{2}-4\,{\Theta }^{2} \left( \ln \left( A \right) \right) ^{2}\right) t\).

5 The (3+1)-dimensional Boussinesq equation Wazwaz and Kaur (2019), Hu and Li (2022)
where \(u=u(x,y,z,t)\) is the unknown function with a real value that results from the real independent variables x, y, z, and t, and \(\beta ,\,\gamma ,\,\alpha\) and \(\delta\) are real constants. It is commonly recognized that the 3D-BE is a crucial mathematical physics model with large application background, including in wave motion, weather forecast, and ocean ecology, all of which have undergone intensive research. In Hu and Li (2022), the nonlocal symmetry of the 3D-BE is obtained with the truncated Painleve’ method. Wazwaz and Kaur (2019) tested the integrability of Eq. (23) by Painleve’ test and obtained complex and real soliton solutions for this equation by using the simplified Hirota’s method.
Suppose that Eq. (23) has a traveling wave solution
where \(\sigma\) is wave velocity. Substituting (24) into (23), we get the following nonlinear ODE:
Then, with respect to \(\vartheta\), integrate equation (25) twice and simplify to get
with integral constants treating as zero. Balancing the terms \(U_{\vartheta \vartheta }\) and \(U^{2}\) to get \(N = 2\). By substituting \(N = 2\) in to (4) to get
Substituting (27) in (26) and equate the coefficient of \(Q(\vartheta )\) to zero yields
Following the aforementioned system’s solution, we obtain the sets:
Set 1:
By substituting (29) in to (24), we recover this exact solution
where \(\vartheta = x + \omega y + \left( {\dfrac{-{\alpha }^{2}{\omega }^{2}-4\,{\sigma }^{2}+4\,\alpha \,\omega \,\sigma +16\,\gamma \,{\Theta }^{2} \left( \ln \left( A\right) \right) ^{2}+4}{4\delta }}\right) z- \sigma t\).
Set 2:
By substituting (31) in to (24), we recover this exact solution
where \(\vartheta = x + \omega y - \left( {\frac{{\alpha }^{2}{\omega }^{2}+16\,\gamma \,{\Theta }^{2}\left( \ln \left( A \right) \right) ^{2} + 4\,{\sigma }^{2} - 4 - 4\,\alpha \,\omega \,\sigma }{\delta }}\right) z- \sigma t\).

6 Conclusion
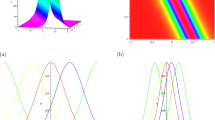
The new type of the Kudryashov technique is utilized to get some new exact solutions of the nonlinear problems. Some of the well-known nonlinear differential equations, e.g. Klein–Gordon equation, Kadomtsev–Petviashvili equation, and Boussinesq equation in higher dimensions are considered. Solitons of discussed equations are reported and some figures are shown to demonstrate the behavior of models in two and three dimensions. Figs. 1, 2, and 3 represent the solutions given by Eqs. (12), (20), and (30) for the models the Klein–Gordon equation, the KP equation, and the Boussinesq equation, respectively. Using the assumed values for the relevant parameter, we found that all obtained solutions depict bright soliton solutions created in 3D through x and t as \(-4.5\le x \le 4.5\) and \(-4.5\le t \le 4.5\). Whereas the 2D spreading is depicted for various t. It is evident that the wave solutions sweep from left to right along x-axis with the same amplitude. We mention that the solutions existed in Yomba (2007), Pandir and Ulusoy (2013) are special cases of the obtained solutions given by (12), (20), and (30) when \(a=b\). The Kudryashov method is a useful and strong mathematical instrument that may be used to provide the analytical solutions to a variety of other different NLPDEs.
Data availability
Not applicable.
References
Abbagari, S., Saliou, Y., Houwe, A., Akinyemi, L., Inc, M., Bouetou, T.B.: Modulated wave and modulation instability gain brought by the cross-phase modulation in birefringent fibers having anti-cubic nonlinearity. Phys. Lett. A 442, 128191 (2022)
Adel, M., Assiri, T.A., Khader, M.M., Osman, M.S.: Numerical simulation by using the spectral collocation optimization method associated with Vieta-Lucas polynomials for a fractional model of non-Newtonian fluid. Result Phys. 41, 105927 (2022)
Akinyemi, L., Mirzazadeh, M., AminBadri, S., Hosseini, K.: Dynamical solitons for the perturbated Biswas-Milovic equation with Kudryashov’s law of refractive index using the first integral method. J. Mod. Opt. 69(3), 172–182 (2022)
Akinyemi, L., Senol, M., Az-Zo’bi, E., Veeresha, P., Akpan, U.: Novel soliton solutions of four sets of generalized (2+ 1)-dimensional Boussinesq-Kadomtsev-Petviashvili-like equations. Mod. Phys. Lett. B 36(01), 2150530 (2022)
Alharbi, A.R., Almatrafi, M.B., Abdelrahman, M.A.: Analytical and numerical investigation for Kadomtsev–Petviashvili equation arising in plasma physics. Phys. Scr. 95(4), 045215 (2020)
Ali, K.K., Wazwaz, A.M., Osman, M.S.: Optical soliton solutions to the generalized nonautonomous nonlinear Schrödinger equations in optical fibers via the sine-Gordon expansion method. Optik 208, 164132 (2020)
Aljahdali, M., El-Sherif, A.A., Shoukry, M.M., Mohamed, S.E.: Potentiometric and thermodynamic studies of binary and ternary transition metal (II) complexes of imidazole-4-acetic acid and some bio-relevant ligands. J. Solut. Chem. 42(5), 1028–1050 (2013)
Arqub, O.A., Osman, M.S., Abdel-Aty, A.H., Mohamed, A.B.A., Momani, S.: A numerical algorithm for the solutions of ABC singular Lane-Emden type models arising in astrophysics using reproducing kernel discretization method. Mathematics 8(6), 923 (2020)
Arqub, O.A., Tayebi, S., Baleanu, D., Osman, M.S., Mahmoud, W., Alsulami, H.: A numerical combined algorithm in cubic B-spline method and finite difference technique for the time-fractional nonlinear diffusion wave equation with reaction and damping terms. Result Phys. 41, 105912 (2022)
Arqub, O.A., Osman, M.S., Park, C., Lee, J.R., Alsulami, H., Alhodaly, M.: Development of the reproducing kernel Hilbert space algorithm for numerical pointwise solution of the time-fractional nonlocal reaction-diffusion equation. Alex. Eng. J. 61(12), 10539–10550 (2022)
Baskonus, H.M., Sulaiman, T.A., Bulut, H., Aktürk, T.: Investigations of dark, bright, combined dark-bright optical and other soliton solutions in the complex cubic nonlinear Schrödinger equation with \(\delta\)-potential. Superlattices Microstruct. 115, 19–29 (2018)
Chargui, Y., Chetouani, L., Trabelsi, A.: Exact solution of the one-dimensional Klein–Gordon equation with scalar and vector linear potentials in the presence of a minimal length. Chin. Phys. B 19(2), 020305 (2010)
Cheemaa, N., Chen, S., Seadawy, A.R.: Propagation of isolated waves of coupled nonlinear (2+ 1)-dimensional Maccari system in plasma physics. Result Phys. 17, 102987 (2020)
Chu, Y.M., Nazir, U., Sohail, M., Selim, M.M., Lee, J.R.: Enhancement in thermal energy and solute particles using hybrid nanoparticles by engaging activation energy and chemical reaction over a parabolic surface via finite element approach. Fractal Fract. 5(3), 119 (2021)
Dan, J., Sain, S., Ghose-Choudhury, A., Garai, S.: Solitary wave solutions of nonlinear PDEs using Kudryashov’s R function method. J. Mod. Opt. 67(19), 1499–1507 (2020)
El-Shiekh, R.M., Al-Nowehy, A.G.: Integral methods to solve the variable coefficient nonlinear Schrödinger equation. Z. Naturforschung 68, 255–260 (2013)
Fan, E., Hona, Y.C.: Generalized tanh method extended to special types of nonlinear equations. Z. Naturforschung 57(8), 692–700 (2002)
Gai, L., Bilige, S., Jie, Y.: The exact solutions and approximate analytic solutions of the (2+1)-dimensional KP equation based on symmetry method. SpringerPlus 5(1), 1267 (2016)
Gepreel, K.A., Zayed, E.M.E.: Multiple wave solutions for nonlinear burgers equations using the multiple exp-function method. Int. J. Mod. Phys. C 32(11), 2150149 (2021)
Günerhan, H., Khodadad, F.S., Rezazadeh, H., Khater, M.M.: Exact optical solutions of the (2+ 1) dimensions Kundu-Mukherjee-Naskar model via the new extended direct algebraic method. Mod. Phys. Lett. B 34(22), 2050225 (2020)
Hashemi, M.S.: Some new exact solutions of (2+1)-dimensional nonlinear Heisenberg ferromagnetic spin chain with the conformable time fractional derivative. Opt. Quant. Electron. 50(2), 79 (2018)
Hashemi, M.S.: A novel approach to find exact solutions of fractional evolution equations with non-singular kernel derivative. Chaos Soliton Fract. 152(2021), 111367 (2021)
Hong, B., Lu, D.: New Jacobi elliptic functions solutions for the higher-order nonlinear Schrödinger equation. Int. J. Nonlinear Sci. 7(3), 360–367 (2009)
Hosseini, K., Osman, M.S., Mirzazadeh, M., Rabiei, F.: Investigation of different wave structures to the generalized third-order nonlinear Scrödinger equation. Optik 206, 164259 (2020)
Houwe, A., Souleymanou, A., Akinyemi, L., Doka, S.Y., Inc, M.: Discrete breathers incited by the intra-dimers parameter in microtubulin protofilament array. Eur. Phys. J. Plus 137(4), 465 (2022)
Hu, H., Li, X.: Nonlocal symmetry and interaction solutions for the new (3+1)-dimensional integrable Boussinesq equation. Math. Model. Nat. Phenom. 17, 2 (2022)
Ismael, H.F., Akkilic, A.N., Murad, M.A.S., Bulut, H., Mahmoud, W., Osman, M.S.: Boiti-Leon-Manna-Pempinelli equation including time-dependent coefficient (vcBLMPE): a variety of nonautonomous geometrical structures of wave solutions. Nonlinear Dyn. (2022). https://doi.org/10.1007/s11071-022-07817-5
Jeragh, B., Al-Wahaib, D., El-Sherif, A.A., El-Dissouky, A.: Potentiometric and thermodynamic studies of dissociation and metal complexation of 4-(3-hydroxypyridin-2-ylimino)-4-phenylbutan-2-one. J. Chem. Eng. Data 52(5), 1609–1614 (2007)
Jin, F., Qian, Z.S., Chu, Y.M., ur Rahman, M.: On nonlinear evolution model for drinking behavior under Caputo-Fabrizio derivative. J. Appl. Anal. Comput. 12(2), 790–806 (2022)
Kohl, R.W., Biswas, A., Zhou, Q., Ekici, M., Alzahrani, A.K., Belic, M.R.: Optical soliton perturbation with polynomial and triple-power laws of refractive index by semi-inverse variational principle. Chaos Soliton Fract. 135, 109765 (2020)
Kudryashov, N.A.: Highly dispersive solitary wave solutions of perturbed nonlinear Schrödinger equations. Appl. Math. Comput. 371, 124972 (2020)
Kumar, S., Mohan, B.: A study of multi-soliton solutions, breather, lumps, and their interactions for kadomtsev-petviashvili equation with variable time coeffcient using hirota method. Phys. Scr. 96(12), 125255 (2021)
Kumar, S., Almusawa, H., Dhiman, S.K., Osman, M.S., Kumar, A.: A study of Bogoyavlenskii’s (2+ 1)-dimensional breaking soliton equation: lie symmetry, dynamical behaviors and closed-form solutions. Result Phys. 29, 104793 (2021)
Kumar, S., Dhiman, S.K., Baleanu, D., Osman, M.S., Wazwaz, A.M.: Lie symmetries, closed-form solutions, and various dynamical profiles of solitons for the variable coefficient (2+1)-dimensional KP equations. Symmetry 14(3), 597 (2022)
Mahak, N., Akram, G.: Exact solitary wave solutions by extended rational sine-cosine and extended rational sinh-cosh techniques. Phys. Scr. 94(11), 115212 (2019)
Malik, S., Kumar, S., Nisar, K.S., Saleel, C.A.: Different analytical approaches for finding novel optical solitons with generalized third-order nonlinear Schrödinger equation. Result Phys. 29, 104755 (2021)
Malik, S., Almusawa, H., Kumar, S., Wazwaz, A.M., Osman, M.S.: A (2+ 1)-dimensional Kadomtsev-Petviashvili equation with competing dispersion effect: Painlevé analysis. Dynamical behavior and invariant solutions. Result Phys. 23, 104043 (2021)
Mohamed, M., El-Sherif, A.A.: Complex formation equilibria between zinc (II), nitrilo-tris (methyl phosphonic acid) and some bio-relevant ligands. The kinetics and mechanism for zinc (II) ion promoted hydrolysis of glycine methyl ester. J. Solut. Chem. 39(5), 639–653 (2010)
Nisar, K.S., Ilhan, O.A., Abdulazeez, S.T., Manafian, J., Mohammed, S.A., Osman, M.S.: Novel multiple soliton solutions for some nonlinear PDEs via multiple Exp-function method. Result Phys. 21, 103769 (2021)
Nisar, K.S., Akinyemi, L., Inc, M., Senol, M., Mirzazadeh, M., Houwe, A., Abbagari, S., Rezazadeh, H.: New perturbed conformable Boussinesq-like equation: soliton and other solutions. Result Phys. 33, 105200 (2022)
Opanasenko, S., Popovych, R.Q.: Generalized symmetries and conservation laws of (1+1)-dimensional Klein–Gordon equation. J. Math. Phys. 61(10), 101515 (2020)
Osman, M.S.: Multi-soliton rational solutions for quantum Zakharov-Kuznetsov equation in quantum magnetoplasmas. Waves Random Complex Media 26(4), 434–443 (2016)
Osman, M.S.: Multiwave solutions of time-fractional (2+1)-dimensional Nizhnik-Novikov-Veselov equations. Pramana 88(4), 67 (2017)
Osman, M.S.: One-soliton shaping and inelastic collision between double solitons in the fifth-order variable-coefficient Sawada-Kotera equation. Nonlinear Dyn. 96(2), 1491–1496 (2019)
Osman, M.S., Ghanbari, B.: New optical solitary wave solutions of Fokas-Lenells equation in presence of perturbation terms by a novel approach. Optik 175, 328–333 (2018)
Osman, M.S., Wazwaz, A.M.: A general bilinear form to generate different wave structures of solitons for a (3+1)-dimensional Boiti-Leon-Manna-Pempinelli equation. Math. Method Appl. Sci. 42(18), 6277–6283 (2019)
Osman, M.S., Lu, D., Khater, M.M.: A study of optical wave propagation in the nonautonomous Schrödinger-Hirota equation with power-law nonlinearity. Result Phys. 13, 102157 (2019)
Osman, M.S., Tariq, K.U., Bekir, A., Elmoasry, A., Elazab, N.S., Younis, M., Abdel-Aty, M.: Investigation of soliton solutions with different wave structures to the (2+ 1)-dimensional Heisenberg ferromagnetic spin chain equation. Commun. Theor. Phys. 72(3), 035002 (2020)
Özkan, Y.S., Yasar, E., Osman, M.S.: Novel multiple soliton and front wave solutions for the 3D-Vakhnenko-Parkes equation. Mod. Phys. Lett. B 36(09), 2250003 (2022)
Pandir, Y., Ulusoy, H.: New generalized hyperbolic functions to find new exact solutions of the nonlinear partial differential equations. J. Math. 2013, 201276 (2013)
Qureshi, S., Soomro, A., Hincal, E., Lee, J.R., Park, C., Osman, M.S.: An efficient variable stepsize rational method for stiff, singular and singularly perturbed problems. Alex. Eng. J. 61(12), 10953–10963 (2022)
Rashid, S., Kubra, K.T., Sultana, S., Agarwal, P., Osman, M.S.: An approximate analytical view of physical and biological models in the setting of Caputo operator via Elzaki transform decomposition method. J. Comput. Appl. Math. 413, 114378 (2022)
Rezazadeh, H., Odabasi, M., Tariq, K.U., Abazari, R., Baskonus, H.M.: On the conformable nonlinear Schrödinger equation with second order spatiotemporal and group velocity dispersion coefficients. Chin. J. Phys. 72, 403–414 (2021)
Sain, S., Ghose-Choudhury, A., Garai, S.: Solitary wave solutions for the KdV-type equations in plasma: a new approach with the Kudryashov function. Eur. Phys. J. Plus 136, 226 (2021)
Savescu, M., Bhrawy, A.H., Hilal, E.M., Alshaery, A.A., Biswas, A.: Optical solitons in birefringent fibers with four-wave mixing for Kerr law nonlinearity. Rom. J. Phys. 59(5–6), 582–589 (2014)
Tarla, S., Ali, K.K., Yilmazer, R., Osman, M.S.: On dynamical behavior for optical solitons sustained by the perturbed Chen-Lee-Liu model. Commun. Theor. Phys. 74(7), 075005 (2022)
Tarla, S., Ali, K.K., Yilmazer, R., Osman, M.S.: The dynamic behaviors of the Radhakrishnan-Kundu-Lakshmanan equation by Jacobi elliptic function expansion technique. Opt. Quant. Electron. 54(5), 292 (2022)
Tarla, S., Ali, K.K., Yilmazer, R., Osman, M.S.: New optical solitons based on the perturbed Chen-Lee-Liu model through Jacobi elliptic function method. Opt. Quant. Electron. 54(2), 131 (2022)
Wazwaz, A.M., Kaur, L.: New integrable Boussinesq equations of distinct dimensions with diverse variety of soliton solutions. Nonlinear Dyn. 97(1), 83–94 (2019)
Wazwaz, A.M., Osman, M.S.: Analyzing the combined multi-waves polynomial solutions in a two-layer-liquid medium. Comput. Math. Appl. 76(2), 276–283 (2018)
Yao, S.W., Islam, M.E., Akbar, M.A., Inc, M., Adel, M., Osman, M.S.: Analysis of parametric effects in the wave profile of the variant Boussinesq equation through two analytical approaches. Open Phys. 20(1), 778–794 (2022)
Yaro, D., Seadawy, A., Lu, D.C.: Propagation of traveling wave solutions for nonlinear evolution equation through the implementation of the extended modified direct algebraic method. Appl. Math. Ser. B 35(1), 84–100 (2020)
Yépez-Martínez, H., Pashrashid, A., Gómez-Aguilar, J.F., Akinyemi, L., Rezazadeh, H.: The novel soliton solutions for the conformable perturbed nonlinear Schrödinger equation. Mod. Phys. Lett. B 36(08), 2150597 (2022)
Yomba, E.: New generalized hyperbolic functions to find new coupled ultraslow optical soliton pairs in a cold three-state double-\(\Lambda\) system. Phys. Scr. 76(1), 8 (2007)
Zayed, E.M.E., Arnous, A.H.: Exact traveling wave solutions of nonlinear PDEs in mathematical physics using the modified simple equation method. Appl. Appl. Math. Int. J. 8(2), 553–572 (2013)
Zhang, X., Chen, Y.: Inverse scattering transformation for generalized nonlinear Schrödinger equation. Appl. Math. Lett. 98, 306–313 (2019)
Zhou, Q., Ekici, M., Sonmezoglu, A., Mirzazadeh, M., Eslami, M.: Optical solitons with Biswas–Milovic equation by extended trial equation method. Nonlinear Dyn. 84(4), 1883–1900 (2016)
Acknowledgements
The authors would like to thank the Deanship of Scientific Research at Umm Al-Qura University for supporting this work by Grant Code: (22UQU4410172DSR17).
Author information
Authors and Affiliations
Contributions
The authors read and approved the final manuscript.
Corresponding authors
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Ethical approval
Not applicable.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Malik, S., Hashemi, M.S., Kumar, S. et al. Application of new Kudryashov method to various nonlinear partial differential equations. Opt Quant Electron 55, 8 (2023). https://doi.org/10.1007/s11082-022-04261-y
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11082-022-04261-y