
Abstract
In this paper, we establish unconditionally optimal error estimates for linearized backward Euler Galerkin finite element methods (FEMs) applied to nonlinear Schrödinger-Helmholtz equations. By using the temporal-spatial error splitting techniques, we split the error between the exact solution and the numerical solution into two parts which are called the temporal error and the spatial error. First, by introducing a time-discrete system, we prove the uniform boundedness for the solution of this time-discrete system in some strong norms and derive error estimates in temporal direction. Second, by the above achievements, we obtain the boundedness of the numerical solution in \(L^{\infty }\)-norm. Then, the optimal L2 error estimates for r-order FEMs are derived without any restriction on the time step size. Numerical results in both two- and three-dimensional spaces are provided to illustrate the theoretical predictions and demonstrate the efficiency of the methods.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
In this paper, we focus on error estimates for linearized backward Euler Galerkin FEMs applied to the generalized nonlinear Schrödinger-Helmholtz equations defined by
for x ∈Ω and t ∈ [0,T], where Ω is a bounded and convex (or smooth) domain in \(\mathbb {R}^{d} ~(d=2,3)\). The initial and boundary conditions are taken to be
Here \(\textmd {i}=\sqrt {-1}\), α, β are real nonnegative constants with α + β≠ 0, and \(f:~\mathbb {R}\rightarrow \mathbb {R}\) and \(u_{0}:~{\Omega }\rightarrow \mathbb {C}\) are given functions. The complex-valued function u(x,t) stands for the single particle wave function, ψ(x,t) is a real-valued function which denotes the potential. The above system may describe many different physical phenomena in optics, quantum mechanics, and plasma physics. The system (1)–(3) defines the Schrödinger-Poisson model [7, 18, 22, 27, 28, 30] when α = 0. When β = 0, the system (1)–(3) reduces to a generalized nonlinear Schrödinger (GNLS) equation [3, 33, 34]. The other Schrödinger system such as the Schrödinger-Poisson-Slater model can found in [5, 37, 44].
In the past several decades, there are numerous works devoted to the theoretical analysis for various Schrödinger type equations (see, e.g., [6, 38] and the references therein). We refer to [30, 37] for the existence and uniqueness of solutions of the Schrödinger-Poisson type equations in \(\mathbb {R}^{d}~(d=2,3)\). In [11], Cao et al. proved the local and global existence of a unique solution of the Schrödinger-Helmholtz equations. Numerical methods and analysis for the nonlinear Schrödinger type equations can be found in [4, 9, 29, 35, 40] for finite difference methods, in [2, 7, 36, 45] for FEMs, and in [8, 12] for spectral methods. In [2], Akrivis obtained optimal L2 error estimates of the Crank-Nicolson Galerkin FEMs for the GNLS equation by a classical energy method. But this optimal L2 error estimates required the time step condition \(\tau =\mathcal {O}(h^{d/4})~(d=2,3)\) for both linearized and nonlinear schemes, where τ and h denote the time step size and the mesh width, respectively, and d represents the dimension of space. In [42], Tourigny obtained optimal H1 error estimates of the implicit backward Euler and Crank-Nicolson Galerkin finite element schemes for the GNLS equation by using a nonlinear stability theory, which required the time step conditions \(\tau =\mathcal {O}(h^{d/2})\) and \(\tau =\mathcal {O}(h^{d/4})\) (d = 1,2,3) for the two schemes, respectively. In addition, optimal error estimates of finite difference schemes under certain time step conditions can be found in [5, 36]. In [39], Sun and Wang established two linearized Crank-Nicolson finite difference schemes for coupled cubic Schrödinger equation in three-dimensional space, and derived optimal L2 error estimates of the schemes unconditionally.
In the practical computations of solving nonlinear partial differential equations, linearized schemes are usually more efficient since at each time step, the schemes only require solving a linear system. However, they typically suffer from the time step restriction conditions. In order to derive the optimal error estimates of linearized backward Euler Galerkin FEMs, one usually needs to prove the boundedness of numerical solutions in \(L^{\infty }\)-norm. For this purpose, by using the induction method with an inverse inequality, one has
where \({U_{h}^{n}}\) and un are the numerical solution and the exact solution, respectively; Rh is a Ritz projection operator; r is the degree of the Galerkin FEMs; and C is a generic positive constant. However, the above inequality leads to a time step condition \(\tau =\mathcal {O}(h^{\frac {d}{2}})\) (see [13, 14, 19, 31] for more details). This condition may lead to the use of an unnecessarily small time steps and make the computations much more time-consuming in practice. Recently, a new method was proposed by Li and Sun [23, 24] to derive unconditional stability and convergence of a linearized backward Euler Galerkin FEM for the time-dependent Joule heating equations. Moreover, this method was used in [25] for a nonlinear equation from incompressible miscible flows in porous media, in [16] for the Landau-Lifshitz equation, in [17] for the time-dependent Ginzburg-Landau equations, and in [43] for the generalized nonlinear Schrödinger equation. This new method is based upon an error splitting technique by introducing a corresponding time-discrete system. After deriving a priori estimates for the solution of the time-discrete system, one has
where Un is the solution of the time-discrete system. Therefore, the boundedness of \({U_{h}^{n}}\) in \(L^{\infty }\)-norm can be obtained without time step restriction.
In this paper, applying the error splitting technique proposed in [23,24,25,26], we study two linearized backward Euler schemes with r-order Galerkin FEMs (r ≥ 1) for the time-dependent nonlinear Schrödinger-Helmholtz equations (1)–(3). The first scheme is semi-decoupled, and at each time step, one needs to solve for \({\Psi }_{h}^{n+1}\) firstly, and then to solve for \(U_{h}^{n+1}\). The second scheme is fully decoupled, which is presented in numerical experiments. At each time step, it allows us to solve for \({\Psi }_{h}^{n+1}\) and \(U_{h}^{n+1}\) in parallel. We only consider the theoretical analysis of the first scheme since it can be easily extended to the second one. However, the efficiency of the second method is verified in numerical experiments. In our analysis, by introducing a corresponding iterated time-discrete system, we prove the uniform boundedness for the solution of this system in some strong norms and derive error estimates in temporal direction. Next, we split the finite element error into two parts, the error in the temporal direction plus the error in the spatial direction, and derive the boundedness of the numerical solution in \(L^{\infty }\)-norm. Then, the optimal L2 error estimates for r-order FEMs (r ≥ 1) are derived without any restriction on the time step size. Numerical results in both two- and three-dimensional space are presented to illustrate the theoretical predictions and demonstrate the efficiency of the method.
The rest of the paper is organized as follows. In Section 2, a linearized backward Euler Galerkin FEM for the nonlinear Schrödinger-Helmholtz equations (1)–(3) is presented. We split the error function as a temporal error function and a spatial error function by introducing a corresponding time-discrete system. Section 3 provides a priori estimates for the temporal error and suitable regularity for the solution of the time-discrete system. In Section 4, we obtain the τ-independent spatial error estimates in L2-norm. In Section 5, we derive the uniform boundedness of numerical solutions in \(L^{\infty }\)-norm and establish unconditional optimal L2 error estimates of the r-order (r ≥ 1) Galerkin FEMs. In Section 6, we present the fully decoupled linearized backward Euler Galerkin FEM and provide some numerical examples for both two- and three-dimensional models to illustrate our theoretical analysis. Finally, conclusions are given in Section 7.
2 Preliminaries
Before presenting the schemes, we introduce some notations, definitions, and preliminary lemmas which will be used in the analysis. Let Ω be an open, bounded convex polygonal domain in \(\mathbb {R}^{2}\) or polyhedral domain in \(\mathbb {R}^{3} \) with Lipschitz continuous boundary ∂Ω. Let \(W^{k,p}({\Omega })~(k\in \mathbb {N},1\leq p\leq +\infty )\) denote the standard Sobolev space equipped with the norm \(\|\cdot \|_{W^{k,p}}\) [1]. The space Hk(Ω) is the standard Hilbertian Sobolev space of order k with norm \(\|\cdot \|_{H^{k}}\) [1]. All other norms will be clearly labeled.
Following the classical finite element theory [10], we define \(\tau _{h}=\{\mathcal {K}\}\) to be a quasi-uniform partition of Ω into triangular (in \(\mathbb {R}^{2}\)) or tetrahedral (in \(\mathbb {R}^{3}\)), let \(h=\max \limits _{\forall \mathcal {K}\in \tau _{h}}\{\textmd {diam}\mathcal {K}\}\) and 0 < h < 1. For every \(\mathcal {K}\in \tau _{h}\) and a nonnegative integer l , \(P_{l}(\mathcal {K})\) is the space of the l th-order polynomial on \(\mathcal {K}\). With these notations, we introduce the following finite element space
where r ≥ 1 is a fixed integer. Let 0 = t0 < t1 < ⋅⋅⋅ < tN = T be a uniform partition of the time interval [0,T] with time step size τ = T/N, tn = nτ and un = u(⋅,tn), ψn = ψ(⋅,tn) for 0 ≤ n ≤ N. For any sequence of functions \(\{f^{n}\}_{n=0}^{N}\), we define
For any two complex functions u, v ∈ L2(Ω), the L2 inner product is defined as follows:
where \(\bar {v}\) denotes the complex conjugate of v.
Let \(R_{h}:~{H_{0}^{1}}({\Omega })\rightarrow V_{h}\) be a Ritz projection operator defined by
By the classical finite element theory [10, 41], we know
and
for any \(v\in H^{s}({\Omega })\cap {H_{0}^{1}}({\Omega })\), 1 ≤ s ≤ r + 1.
With above notations, a linearized backward Euler Galerkin FEM is to find \(U_{h}^{n+1},~\psi _{h}^{n+1}\in V_{h}\) such that
with the initial value \({U_{h}^{0}}=R_{h} u_{0}\) and \({{\Psi }_{h}^{0}}\) satisfies
Multiplying (6) by \(U_{h}^{n+1}\) and integrating it over Ω to get
Taking the imaginary parts of the above equation yields
and then, we have
For analyzing the linearized scheme (6)–(7), we introduce a time-discrete system corresponding it as follows:
with the initial and boundary conditions
for n = 0,1,⋅⋅⋅,N − 1, where \({\Psi }^{0}=\psi ^{0}\) satisfies (2) at t = t0. The homogeneous Dirichlet boundary condition ψ = 0 is imposed on ∂Ω; thus, the classical regularity theory of PDEs [15] shows the boundedness of \(\|{\Psi }^{0}\|_{H^{2}}\). In addition, it is easy to see that Un+ 1 satisfies the following estimate
The main idea to our proof in this paper is the error splitting technique proposed in [23,24,25,26]; by this technique, we separate the errors into the temporal error and the spatial error as
With the splitting, we can prove that the temporal error is \(\mathcal {O}(\tau )\) and the spatial error is \(\mathcal {O}(h^{2})\), from which and the inverse inequality, we can obtain the uniform boundedness of numerical solutions \(U_{h}^{n+1}\) and \({\Psi }_{h}^{n+1}\) in \(L^{\infty }\)-norm. Then, the optimal error estimates can be easily obtained.
In the remaining of this paper, we assume that \(f^{(l)}:~\mathbb {R}\rightarrow \mathbb {R}~(l=0,1)\) are locally Lipschitz continuous, i.e., for any r1, r2 ∈ [−M∗,M∗],
where \(L_{M^{*}}\) is the Lipschitz constant depended on M∗ and f(l) denotes the l th-order derivative of f. We also assume that the solution to the initial and boundary value problem (1)–(3) exists and satisfies
The discrete Gronwall’s lemma plays an important role in the analysis; we recall from [21] as follows:
Lemma 1
(Discrete Gronwall’s inequality) Let Δt,H and an,bn,cn,dn (for integers n ≥ 0) be nonnegative numbers such that
Suppose that Δtdn < 1, for all n, and set σn = (1 −Δtdn)− 1, then
Remark 1
If the first sum on the right-hand side of (1) extends only up to l − 1, then estimate (1) holds for all Δt > 0 with σn = 1.
In our analysis, we need the following lemma and we refer to [15] for the details of the proof.
Lemma 2
Let m be a nonnegative integer, and assume g ∈ Hm(Ω) and ∂Ω is Cm+ 2. Suppose that \(v\in {H_{0}^{1}}({\Omega })\) is the unique solution of the boundary value problem
Then v ∈ Hm+ 2(Ω) and the following estimate holds
where \(\tilde {C}\) depending on m, Ω and α, β.
Remark 2
Lemma 2 is also valid for convex domains when m = 0.
We recall the Gagliardo-Nirenberg inequality [1, 32] in the following lemma which will be frequently used in our proofs.
Lemma 3
(Gagliardo-Nirenberg inequality) Let u be a function defined on Ω and ∂su be any partial derivative of u of order s, then
for 0 ≤ j < m and \(\frac {j}{m}\leq a\leq 1\) with
except \(1<r<\infty \) and \(m-j-\frac {d}{r}\) is a non-negative integer, in which case the above estimate holds for \(\frac {j}{m}\leq a <1\).
Since the triangulations τh is assumed to be regular, for each vh ∈ Vh, the following inverse inequality holds [10]:
For the simplicity of notations, we denote by C0 a constant dependent upon α, β, f, and M given in (15). We denote by C a generic positive constant involved in some classical inequalities, such as the Gagliardo-Nirenberg inequality and inequalities for Ritz projection, which depend upon the domain Ω and the shape regularity parameter of the mesh. Also we denote by CM a generic positive constant independent of n, h, and τ and can absorb the constants C0 and C, which could be taken different values in different places.
3 Temporal error estimates
In this section, we will estimate the error functions un+ 1 − Un+ 1 and ψn+ 1 −Ψn+ 1 and establish the boundedness of the time-discrete solutions in some norms.
Under the regularity assumption (15), we define
which is a positive constant dependent on M and independent of τ, h, and n. Let
The system (1)–(2) at t = tn+ 1 can be rewritten as
where
Subtracting (10)–(11) from (17)–(18) leads to
where
By Taylor formulation, (14), and the regularity assumption (15), it is easy to see that
Theorem 1
Suppose that the system (1)–(3) has a unique solution u, ψ satisfying (15). Then, there exists positive constants \(\tau _{0}^{*}\) such that when \(\tau <\tau _{0}^{*}\), the time-discrete system (10)–(12) has unique solutions Um+ 1, Ψm+ 1, m = 0,1,⋅⋅⋅,N − 1, and there holds
where \(C_{0}^{*},~C_{0}^{+}\) are two positive constants dependent on M and independent of m, h, τ.
Proof
System (10)–(12) are linear elliptic equations, and following the classical theory of elliptic PDEs and the bound (13), we can find the solution of system (10)–(12) exists and is unique. Before proving (22) and (23), we use mathematical induction to prove the following estimate
We first prove that the above estimate holds for m = 0. Choosing n = 0 in (19), we have
From (11) and Lemma 2, we have
By the embedding \(H^{2}({\Omega })\hookrightarrow L^{\infty }({\Omega })\), we have
From (26), (21), and Lemma 2, we have
Noticing that
and using (27) and (28), we have
Testing (25) by \(\bar {e}^{1}\) and taking the imaginary part of the resulting equation to get
when \(\tau \leq \tau _{1}=\min \limits \{\frac {1}{2C_{M}},(\frac {C_{M}}{C_{0}})^{2}\}\). From (25), (29), and (30), we know
when τ ≤ τ1. Next, we estimate \(\|e^{1}\|_{L^{\infty }}\leq CC_{M}\tau ^{\frac {1}{4}}\) for d = 3 and d = 2, respectively. For d = 3, by the Gagliardo-Nirenberg inequality in Lemma 3, (30), and (31), we have
Similarly, for d = 2, we know
Therefore,
when \(\tau \leq \tau _{2}=\frac {1}{(CC_{M})^{4}}\). Thus, (24) holds for m = 0. Now, by mathematical induction, we assume (24) holds for m ≤ n − 1. Then, from (11), we have
Noticing that
we have
here, (14), (15), and the induction assumption are used.
From (20), (21), (35), and Lemma 2, we know that
We rewrite \(\mathcal {R}_{1}^{n+1}\) as
and then we have
Next, we prove that (24) holds for m = n. Testing (19) by \(\bar {e}^{n+1}\) and taking the imaginary part of the resulting equation to derive
where (38) is used. Summing up the above inequality and using the discrete Gronwall’s inequality and (21), we know that there exists τ3 > 0 such that
when τ ≤ τ3. The above estimate shows that
with which and (19) and (21), we have
when τ ≤ τ1. By the same techniques used in the proof of estimates (32) and (33), one has
Thus, we have
when τ ≤ τ2. Thus, (24) holds for m = n. The induction is completed.
From (36) and (39), we can easily obtain
Furthermore, by (43), (11), and Lemma 2, we arrive at
Testing (19) by \({\Delta } \bar {e}^{n+1}\) and taking the real parts of the resulting equation lead to
which shows that
Summing the above inequality from n = 0 to n = N − 1 and using (21), (38), and (39), we have
From above inequality, we can easily get
For proving the remaining estimates, we need to bound \(\|\mathcal {R}_{1}^{n+1}\|_{H^{1}}\). From (37), one has
where
here,
Combining estimates \(\mathcal {I}_{1}\), \(\mathcal {I}_{2}\), and \(\mathcal {I}_{3}\) into (46), and using (42), we have
Testing (19) by − Dτen+ 1 leads to
Taking the real parts of above inequality, we have
Testing (19) by \(\mathcal {R}_{1}^{n+1}\) and taking the imaginary parts of the resulting equation, we have
By (38), (39), (47), and the Young’s inequality, we obtain
Meanwhile, we write the second term on the right-hand side of inequality (49) as
Testing (19) by Dτun+ 1 − ut(tn+ 1) leads to
By (38), (39), and the Young’s inequality, we can obtain
Testing (19) by ψn+ 1f(|un|)un+ 1 − ψn+ 1f(|un+ 1|)un+ 1 yields
Thanks to the above equation, (38), (39), (14), and (15), we have
Combining estimates (51), (52), (53), and (54) into (49), we have
Summing the above inequality up and applying the discrete Gronwall’s inequality, (15) and (21), we know that there exists τ4 > 0 such that
when τ ≤ τ4. Testing (19) by Δen+ 1 and taking the real parts to arrive at
Thanks to (21), (47), (39), and (55), we have
Taking \(\tau _{0}^{*}=\min \limits \{\tau _{1},\tau _{2},\tau _{3},\tau _{4}\}\), and combining (42), (55), (57), (45), (43), and (44), the proof of Theorem 1 is completed. □
4 Spatial error estimates
In this section, we will derive the τ-independent estimates for \(U^{n+1}-U_{h}^{n+1}\) and \({\Psi }^{n+1}-{\Psi }_{h}^{n+1}\) in L2-norm.
By Sobolev embedding inequalities and (5), we know
Similarly, \(\|R_{h} {\Psi }^{n}\|_{L^{\infty }}\leq C\|{\Psi }^{n}\|_{H^{2}},~~n=0,~1,\cdot \cdot \cdot ,N\). With these estimates, we can define
where M1 and M2 are two positive constants dependent on M and independent on τ, h, and n.
Let \(e_{h}^{n+1}=U_{h}^{n+1}-R_{h}U^{n+1},~~\eta _{h}^{n+1}={\Psi }_{h}^{n+1}-R_{h}{\Psi }^{n+1}\). From the full discrete scheme (6)–(7) and the time-discrete scheme (10)–(11), we have the following error equations:
where
Theorem 2
Assume that the unique solution u, ψ of system (1)–(3) satisfies (15). Then the full discrete system (6)–(7) has unique solution \(U_{h}^{m+1},~{\Psi }_{h}^{n+1}\), m = 0,1,⋅⋅⋅,N − 1, and there exists \(\tau _{0}^{\prime }>0\), \(h_{0}^{\prime }>0\) such that when \(\tau \leq \tau _{0}^{\prime }\), \(h\leq h_{0}^{\prime }\),
where \( C_{0}^{\prime }\) is a positive constant dependent on \(C_{0}^{*},~C_{0}^{+}\), M, and independent of m, h, τ.
Proof
The existence and uniqueness of solution of (6) follows the uniform bound (9). Since the coefficient matrix of (7) is symmetric and positive definite, thus the existence and uniqueness of solution of (7) is ensured. Now, we prove the error estimate (60) by mathematical induction. Since \({U_{h}^{0}}=R_{h}u_{0}\), by using (4) and (15), we obtain
From (8) and (2) at t = 0, we have
When β = 0, from (4), (15), and (63), we obtain
When β≠ 0, from (4), (15), and (63), we have
For deriving the estimate \(\|{\Psi }^{0}-{{\Psi }_{h}^{0}}\|_{L^{2}}\), we will use the Aubin-Nitsche techniques. Let g ∈ L2(Ω), take \(\phi \in H^{2}({\Omega })\cap {H_{0}^{1}}({\Omega })\) as the solution of
From Lemma 2, we know \(\|\phi \|_{H^{2}}\leq \tilde {C}\|g\|_{L^{2}}\). Choosing \(g={\Psi }^{0}-{{\Psi }_{h}^{0}}\), one has
Where Phϕ is the elliptic projection of ϕ. Choosing \(h_{1}=(2C\tilde {C})^{-\frac {1}{2}}\), when h ≤ h1, the above estimate along with (4) and (65) implies that
with which and (4) shows that
Combining estimates (62), (64), and (67), and applying the inverse inequality (16), we have
when \(h\leq h_{2}=(CC_{M})^{-\frac {2}{4-d}}\). We rewrite \(\mathcal {Q}_{2}^{1}\) as
and then we have
When β = 0, from (59), it is obvious to see that
When β≠ 0, after choosing \(\varphi ={\eta _{h}^{1}}\) and n = 0 in (59), and using (4), we have
Subtracting (7) from (11) with n = 0, we obtain
Now, we use the Aubin-Nitsche techniques again. Choosing \(g={\Psi }^{1}-{{\Psi }_{h}^{1}}\) in (2), we find
where h ≤ h1, and by (68) and (70), we have
Combining (69) and (71), and using the inverse inequality and (4), we have
when \(h\leq h_{2}=(CC_{M})^{-\frac {2}{4-d}}\). Noticing that
and from (4), (62), and (71), we have
We choose \(v={e_{h}^{1}}\) and n = 0 in (58)
Taking the imaginary parts of the above equation and applying (4) and (72), one has
when \(\tau \leq \tau _{5}=\frac {1}{8C_{M}}\). Then, combining (69), (71), and (4), we find
which shows that (60) holds for m = 0.
We assume that
holds for m ≤ n − 1. By the inverse inequality (16) and the induction assumption (73), we can obtain
for m ≤ n − 1, and \(h\leq h_{2}=(CC_{0}^{\prime })^{-\frac {2}{4-d}}\). By the same techniques used in the proof of estimates (69) and (71), we can obtain
from which and the inverse inequality (16), we can derive that
when \(h\leq h_{3}=(CC_{M}C_{0}^{\prime })^{-\frac {2}{4-d}}\). Noticing that
and from (74), we have
Next, we will prove that (60) also holds for m = n. Choosing \(v=e_{h}^{n+1}\) in (58) and taking the imaginary parts of the resulting equation yield
Summing up the above equation and applying (4), (75), and the induction assumption (73), we have
By the discrete Gronwall’s inequality and Theorem 1, there exists τ6 > 0, such that
with which and (4) and (74), we have
Thus, (60) holds for m = n. Since the τ-independent property of estimates in (60), we can obtain the H1 error estimate by the inverse inequality:
Thus, taking \(\tau _{0}^{\prime }=\min \limits \{\tau _{0}^{*},\tau _{5},\tau _{6}\}\), \(h_{0}^{\prime }=\min \limits \{h_{1},h_{2},h_{3}\}\), we complete the proof of this theorem. □
5 L 2 optimal error estimates
In this section, we will derive L2 optimal error estimates for the r-order (r ≥ 1) Galerkin FEM by using the results in the above sections.
From (4), (22), and (60)–(61), we have optimal error estimates for the linear Galerkin FEM (r = 1) as follows.
Corollary 1
Under the assumptions of Theorem 2, the full discrete system (6)–(7) has unique solution \(U_{h}^{m+1},~{\Psi }_{h}^{n+1}\), m = 0,1,⋅⋅⋅,N − 1, and there exists \(\tau _{0}^{\prime }>0\), \(h_{0}^{\prime }>0\) such that when \(\tau \leq \tau _{0}^{\prime }\), \(h\leq h_{0}^{\prime }\),
where \( C_{1}^{\prime }\) is a positive constant dependent on \(C_{0}^{*},~C_{0}^{+}\), \(C_{0}^{\prime }\), M, and independent of m, h, τ.
For r > 1, the above estimates are not optimal for the r-order Galerkin FEM. However, we can derive the uniform bounds of the numerical solutions in \(L^{\infty }\)-norm from Theorem 2 as:
for n = 0,1,⋅⋅⋅,N − 1 when \(\tau \leq \tau _{0}^{\prime }\), \(h\leq h_{0}^{\prime }\). By the above uniform bounds, we can obtain optimal L2 error estimates given in the following theorem.
Theorem 3
Assume that the system (1)–(3) has a unique solution u, ψ satisfying (15). Then the full discrete system (6)–(7) has unique solution \(U_{h}^{m+1},~{\Psi }_{h}^{n+1}\), m = 0,1,⋅⋅⋅,N − 1, and there exists \(\tau _{0}^{\prime \prime }>0\), \(h_{0}^{\prime }>0\) such that when \(\tau \leq \tau _{0}^{\prime \prime }\), \(h\leq h_{0}^{\prime }\),
where C∗ is a positive constant dependent on \(C_{0}^{*},~C_{0}^{+}\), \(C_{0}^{\prime }\), \(C_{1}^{\prime }\), M, and independent of m, h, τ.
Proof
The exact solutions u and ψ at t = tn+ 1 satisfy
Subtracting (6)–(7) from the two above equations, the error functions \(\tilde {e}_{h}^{n+1}=U_{h}^{n+1}-R_{h} u^{n+1}\), \(\tilde {\eta }_{h}^{n+1}={\Psi }_{h}^{n+1}-R_{h} \psi ^{n+1}\) satisfy
where
By (4), (14), (15), and (78), we can derive
By the same techniques used in the proof of estimates (69) and (71), we can obtain
from which and (79), we find
Thanks to (4) and (15), one has
and
Choosing \(v=\tilde {e}_{h}^{n+1}\) in (83) and taking the imaginary parts of the resulting equation to arrive at
Summing up the above equation and using the Cauchy-Schwarz inequality, (86), (87), and (88) lead to
By the discrete Gronwall’s inequality, there exists τ7 > 0, such that
when τ ≤ τ7, with which and (4) and (85), one has
Let \(\tau _{0}^{\prime \prime }=\min \limits \{\tau _{7},\tau _{0}^{\prime }\}\) and \(h\leq h_{0}^{\prime }\), we finish the proof of Theorem 3. □
6 Numerical experiments
In this section, we provide numerical experiments to illustrate our theoretical analysis in the previous sections. All computations are performed with the public finite element software package Freefem++ [20]. In our tests, we choose the unit square Ω = [0,1]2 as a two-dimensional domain, and the unit cube Ω = [0,1]3 as a three-dimensional domain. For the unit square, a uniform triangular partition with K + 1 nodes in both horizontal and vertical directions is made and the mesh width \(h=\frac {\sqrt {2}}{K}\). For the unit cube, a uniform tetrahedra partition with K + 1 nodes is used in each direction, where the mesh width \(h=\frac {\sqrt {3}}{K}\).
We also test the fully decoupled linearized backward Euler Galerkin FEM, which is under an explicit treatment of the nonlinear terms, the scheme is to seek \(U_{h}^{n+1},\psi _{h}^{n+1}\in V_{h}\) such that
with the initial value \({U_{h}^{0}}=R_{h} u_{0}\) and \({{\Psi }_{h}^{0}}\) satisfies (8).
The scheme (6)–(7) can be seen as a semi-decoupled scheme. At each time step, we need to solve (7) for \({\Phi }_{h}^{n+1}\) firstly, and then to solve (6) for \(U_{h}^{n+1}\). However, the second scheme (89)–(90) is fully decoupled. At each time step, we only need to solve the two systems for \(U_{h}^{n+1}\) and \({\Phi }_{h}^{n+1}\) in parallel. In this paper, we only give out error estimates for the linearized scheme (6)–(7). The analysis presented in this paper can be easily extended to the second linearized scheme (89)–(90), which will be confirmed numerically in this section.
Example 6.1
Firstly, we consider the following Schrödinger-Helmholtz equation
where Ω = [0,1]2. In our computations, the right-hand side functions f1 and f2 and the initial condition u0 are determined by the following analytical solution
Choosing α = β = 1, we solve system (91) by the linearized backward Euler scheme (6)–(7) and the full decoupled scheme (89)–(90) with a linear finite element approximation and a quadratic finite element approximation, respectively. To confirm the optimal convergence rate in the L2-norm, we choose τ = h2 for the linear finite element approximation and τ = h3 for the quadratic finite element approximation, respectively. We present numerical results in Tables 1, 2, 3, and 4 at time t = 0.5,1 and 2. From Tables 1, 2, 3, and 4, we can see that the errors in L2-norm are proportional to hr+ 1, r = 1,2, which agrees with the theoretical analysis and indicates that both schemes are optimal convergence in L2-norm.
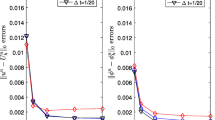
In Theorem 3, we obtain the optimal L2 error estimate \(\mathcal {O}(\tau +h^{r+1})\) unconditionally for r ≥ 1. In order to show the unconditional stability of the linearized backward Euler schemes (6)–(7) and (89)–(90), respectively, we solve problem (91) by using linear and quadratic FEMs with four different time step size τ = 0.2,0.1,0.05,0.01 on gradually refined meshes with K = 10j, j = 1,2,⋅⋅⋅,10. The L2-norm errors at t = 1 are presented in Figs. 1 and 3 for the linear FEM and in Figs. 2 and 4 for the quadratic FEM. From Figs. 1–4, we can observe that for a fixed τ, the L2-norm errors converge to a small constant when the mesh refine gradually, which shows that the two proposed schemes are unconditionally stable and the time step restriction is unnecessary.




Example 6.2
Next, we consider the following high order Schrödinger-Poisson-Slater system
where Ω = [0,1]2. The exact solutions u and ϕ of above system are given as follows:
and the right-hand side functions f1 and f2 and the initial condition u0 are determined by the exact solution and system (92).
To show the unconditional stability (convergence) of the linearized backward Euler scheme (6)–(7), we solve problem (92) by using linear and quadratic FEMs with four different time step size τ = 0.2,0.1,0.05,0.01 on gradually refined meshes with K = 10j, j = 1,2,⋅⋅⋅,10. The numerical results at t = 1 are presented in Fig. 5 for the linear FEM and in Fig. 6 for the quadratic FEM. We can observe that for a fixed τ, L2-norm errors converge to a small constant when the mesh refine gradually, which also shows the unconditional stability of the proposed schemes.


Example 6.3
Finally, we consider the high order Schrödinger-Poisson-Slater system (92) in three-dimensional (3D) space with Ω = [0,1]3. The exact solutions are given as follows:
We solve the high-order Schrödinger-Poisson-Slater system (92) in 3D by the linearized backward Euler scheme (6)–(7) with a linear FEM. We present the numerical results at t = 1 in Fig. 7, which are obtained with four different time step size τ = 0.2,0.1,0.05,0.01 on gradually refined meshes with K = 4j, j = 1,2,⋅⋅⋅,7. Although some previous works give that the error estimates in 3D often required stronger time stepsize conditions than that in 2D, the results in Fig. 7 illustrate that the scheme (6)–(7) is unconditionally convergence for the 3D model.

7 Conclusions and future works
In this paper, we have proved unconditionally optimal error estimates of the linearized backward Euler FEMs for the generalized nonlinear Schrödinger-Helmholtz equations. This optimal error estimate has no restriction on the time and spatial steps. Numerical results in both two- and three-dimensional space are presented to confirm the theoretical predictions and demonstrate clearly the unconditional stability of the proposed schemes. The analytic method in this paper can be considered to analyze other nonlinear physical models in future works.
References
Adams, R.A., Fournier, J.J.: Sobolev Spaces. Academic press, New York (2003)
Akrivis, G.D., Dougalis, V.A., Karakashian, O.A.: On fully discrete Galerkin methods of second-order temporal accuracy for the nonlinear Schrödinger equation. Numer. Math. 59, 31–53 (1991)
Antoine, X., Besse, C., Klein, P.: Absorbing boundary conditions for general nonlinear Schrödinger equations. SIAM J. Sci. Comput. 33, 1008–1033 (2011)
Bao, W., Cai, Y.: Uniform error estimates of finite difference methods for the nonlinear Schrödinger equation with wave operator. SIAM J. Numer. Anal. 50, 492–521 (2012)
Bao, W., Mauser, N.J., Stimming, H.P.: Effective one particle quantum dynamics of electrons: a numerical study of the Schrödinger-Poisson-Xα model. Commun. Math. Sci. 1, 809–828 (2003)
Berezin, F.A., Shubin, M.A.: The Schrödinger Equation. Kluwer Academic Publishers, Dordrecht (1991)
Bohun, S., Illner, R., Lange, H., Zweifel, P.F.: Error estimates for Galerkin approximations to the periodic Schrödinger-Poisson system. Z.MM Z. Angew. Math. Mech. 76, 7–13 (1996)
Borz, A., Decker, E.: Analysis of a leap-frog pseudospectral scheme for the Schrödinger equation. J. Comput. Appl. Math. 193, 65–88 (2006)
Bratsos, A.G.: A modified numerical scheme for the cubic Schrödinger equation. Numer. Methods Part Differ. Equ. 27, 608–620 (2011)
Brenner, S., Scott, L.R.: The Mathematical Theory of Finite Element Methods. Springer, Berlin (1994)
Cao, Y., Musslimani, Z.H., Titi, E.S.: Nonlinear Schrödinger-Helmholtz equation as numercal regularization of the nonlinear Schrödinger equation. Nonlinearity 21, 879–898 (2008)
Dehghan, M., Taleei, A.: Numerical solution of nonlinear Schrödinger equation by using time-space pseudo-spectral method. Numer. Methods Part DifferNumer. Methods Part Differ. Equ. 26, 979–990 (2010)
Douglas, J.J., Ewing, R.E., Wheeler, M.F.: A time-discretization procedure for a mixed finite element approximation of miscible displacement in porous media. RAIRO Anal. Numer. 17, 249–265 (1983)
Ewing, R.E., Wheeler, M.F.: Galerkin methods for miscible displacement problems in porous media. SIAM J. Numer. Anal. 17, 351–365 (1980)
Evans, L.C.: Partial Differential Equations, 2nd edn. AMS, Providence (2010)
Gao, H.: Optimal error estimates of a linearized backward Euler FEM for the Landau-Lifshitz equation. SIAM J. Numer. Anal. 52, 2574–2593 (2014)
Gao, H., Li, B., Sun, W.: Optimal error estimates of linearized Crank-Nicolson Galerkin FEMs for the time-dependent Ginzburg-Landau equations in superconductivity. SIAM J. Numer. Anal. 52, 1183–1202 (2014)
Harrison, R., Moroz, I., Tod, K.P.: A numerical study of the Schrödinger-Newton equations. Nonlinearity 16, 101–122 (2003)
Hou, Y., Li, B., Sun, W.: Error estimates of splitting Galerkin methods for heat and sweat transport in textile materials. SIAM J. Numer. Anal. 51, 88–111 (2013)
Hecht, F.: New development in Freefem++. J. Numer. Math. 20, 251–265 (2012)
Heywood, J.G., Rannacher, R.: Finite element approximation of the nonstationary Navier-Stokes problem. Part IV: Error analysis for the second order time discretization. SIAM J. Numer. Anal. 2, 353–384 (1990)
Leo, M.D., Rial, D.: Well posedness and smoothing effect of Schrödinger-Poisson equation. J. Math. Phys. 48, 093509 (2007)
Li, B., Sun, W.: Error analysis of linearized semi-implicit Galerkin finite element methods for nonlinear parabolic equations. Inter. J. Numer. Anal. Model. 10, 622–633 (2013)
Li, B.: Mathematical Modeling, Analysis and Computation for Some Complex and Nonlinear Flow Problems. PhD Thesis. City University of Hong Kong, Hong Kong (2012)
Li, B., Sun, W.: Unconditional convergence and optimal error estimates of a Galerkin-mixed FEM for incompressible miscible flow in porous media. SIAM J. Numer. Anal. 51, 1959–1977 (2013)
Li, B., Gao, H., Sun, W.W.: Unconditionally optimal error estimates of a Crank-Nicolson Galerkin method for the nonlinear thermistor equations. SIAM J. Numer. Anal. 52, 933–954 (2014)
Lu, T., Cai, W.: A Fourier spectral-discontinuous Galerkin method for time-dependent 3-D Schrödinger-Poisson equations with discontinuous potentials. J. Comput. Appl. Math. 220, 588–614 (2008)
Lubich, C.: On splitting methods for Schrödinger-Poisson and cubic nonlinear Schrödinger equations. Math. Comput. 77, 2141–2153 (2008)
Liao, H., Sun, Z., Shi, H.: Error estimate of fourth-order compact scheme for linear Schrödinger equations. SIAM J. Numer Anal. 47, 4381–4401 (2010)
Masaki, S.: Energy solution to a Schrödinger-Poisson system in the two-dimensional whole space. SIAM J. Math. Anal. 43, 2719–2731 (2011)
Mu, M., Huang, Y.: An alternating Crank-Nicolson method for decoupling the Ginzburg-Landau equations. SIAM J. Numer. Anal. 35, 1740–1761 (1998)
Nirenberg, L.: An extended interpolation inequality. Ann. Scuola Norm. Sup. Pisa (3) 20, 733–737 (1966)
Pathria, D.: Exact solutions for a generalized nonlinear Schrödinger equation. Phys. Scr. 39, 673–679 (1989)
Pelinovsky, D.E., Afanasjev, V.V., Kivshar, Y.S.: Nonlinear theory of oscillating, decaying, and collapsing solitons in the generalized nonlinear Schrödinger equation. Phys. Rev. E 53, 1940–1953 (1996)
Reichel, B., Leble, S.: On convergence and stability of a numerical scheme of coupled nonlinear Schrödinger equations. Comput. Math. Appl. 55, 745–759 (2008)
Sanz-Serna, J.M.: Methods for the numerical solution of nonlinear Schrödinger equation. Math. Comput. 43, 21–27 (1984)
Stimming, H.P.: The IVP for the Schrödinger-Poisson-Xα equation in one dimension. Math. Models Methods Appl. Sci. 8, 1169–1180 (2005)
Sulem, C., Sulem, P.L.: The Nonlinear Schrödinger Equation: Self-Focusing and Wave Collapse. Springer, New York (1999)
Sun, W., Wang, J.: Optimal error analysis of Crank-Nicolson schemes for a coupled nonlinear Schrödinger system in 3D. J. Comput. Appl. Math. 317, 685–699 (2017)
Sun, Z., Zhao, D.: On the \(L^{\infty }\) convergence of a difference scheme for coupled nonlinear Schrödinger. Comput. Math. Appl. 59, 3286–3300 (2010)
Thomee, V.: Galerkin Finite Element Methods for Parabolic Problems. Springer, Berlin (2006)
Tourigny, Y.: Optimal H1 estimates for two time-discrete Galerkin approximations of a nonlinear Schrödinger equation. IMA J. Numer. Anal. 11, 509–523 (1991)
Wang, J.: A new error analysis of Crank-Nicolson Galerkin FEMs for a generalized nonlinear Schrödinger equation. J. Sci. Comput. 60, 390–407 (2014)
Zhang, Y., Dong, X.: On the computation of ground state and dynamics of Schrödinger-Poisson-Slater system. J. Comput. Phys. 220, 2660–2676 (2011)
Zouraris, G.E.: On the convergence of a linear two-step finite element method for the nonlinear Schrödinger equation. M2AN Math. Model. Numer. Anal. 35, 389–405 (2001)
Funding
This work was supported by the Natural Science Foundation of China (NSFC) under grants 11871393 and 61663043, the key project of the International Science and Technology Cooperation Program of Shaanxi Research & Development Plan (2019KWZ-08), and the Doctoral Foundation of Yunnan Normal University (No. 00800205020503093) and the Scientific Research Program Funded by Yunnan Provincial Education Department under grant no. 2019J0076.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Yang, YB., Jiang, YL. Unconditional optimal error estimates of linearized backward Euler Galerkin FEMs for nonlinear Schrödinger-Helmholtz equations. Numer Algor 86, 1495–1522 (2021). https://doi.org/10.1007/s11075-020-00942-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11075-020-00942-5
Keywords
- Schrödinger-Helmholtz equations
- Finite element method
- Optimal error estimates
- Linearized method
- Backward Euler method
- Unconditional convergence