
Abstract
This paper investigates the fixed-time prescribed performance tracking control problem for a class of nonlinear systems with multiple uncertainties. The considered systems involve input delay, coefficients, nonlinear functions and external disturbances which are both unknown, posing significant challenges. To overcome these challenges, a compensation system is introduced to eliminate the impact of time-varying input delay. Subsequently, new adaptive parameters are introduced into the Lyapunov–Krasovskii functional to address unknown external disturbances. By incorporating a specific funnel function to constrain the transient behavior of tracking error, along with backstepping method and bounded estimation techniques, a novel fixed-time control tracking scheme is proposed which ensures the prescribed transient performance. Ultimately, the efficacy of the proposed control methodology is substantiated through simulation examples.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Time delay refers to the phenomenon between the response and the input of the system, which is widely existed in various fields in the real world, including biology, control engineering, transportation and so on [1,2,3]. The study of time delay systems can help us understand the stability and control performance of the system, and provide a theoretical basis for system design. For example, in control engineering, time delay have an important impact on the stability and performance of the system [4, 5]. In the field of biology, the conduction delay in the nervous system is a kind of time-delay phenomenon, and studying the time-delay system is helpful to understand the dynamic characteristics of the nervous system [6]. Therefore, the study of time-delay systems is of great significance and value for theoretical research and practical application.
In recent years, a wealth of results have been obtained for systems with constant or known time-varying delay, such as [7,8,9,10,11,12,13]. To be specific, the study conducted in [7] addressed the global stabilization issue of nonlinear systems featuring unknown control directions and constant parameter uncertainties within the delay domain. In the realm of feedback systems with input delay, an adaptive neural control approach was proposed in [9]. The predicator-based controller for uncertain nonlinear systems with matching conditions was developed in [11, 12], which included finite integrals of past control values. References [13] examined strictly feedback nonlinear systems using the Pade approximation method and utilized fuzzy systems to approximate unknown functions, but the Pade approximation method is only applicable to situations where the input delay is very small. However, in many practical systems, specific information about system delay is unknown, and unknown delay are frequently encountered in practical engineering systems. Therefore, studying the impact of unknown delay is crucial and has received widespread attention, such as [14,15,16,17,18]. For example, for a class of uncertain nonlinear systems with unknown time-varying input delay and interference, the asymptotic tracking controller was designed in [16].
It is noteworthy that, in contrast to asymptotic stability, fixed-time stability offers superior control performance and is better suited for practical systems, see as [19,20,21,22,23]. However, to our knowledge, there are relatively few results concerning fixed-time control problems. Designing a controller for fixed-time control remains a highly challenging and difficult task when such a requirement is imposed on the system. While the fixed-time control problem for high-order nonlinear systems was addressed in [23], the presence of singularity issues during the analysis restricts the overall generality of the proof.
As is well known, the concept of prescribed performance control was initially introduced by Bechlioulis and Rovithakis [24]. Prescriptive performance control entails the convergence of tracking errors to a predefined small residual set, where the maximum fluctuation of errors is less than a predetermined constant, and the convergence time is not less than a specified duration. There are numerous intriguing results associated with prescribed performance control. For instance, for uncertain MIMO nonlinear systems, a new robust tracking controller was proposed in [25], which can guarantee output tracking with specified performance. In the realm of uncertain strict feedback nonlinear systems with arbitrary relative degrees and unknown control directions, an asymptotic tracking control approach was introduced in [26], which guarantees the specified transient behavior of the system. A hybrid control strategy was proposed in [27] to ensure asymptotic convergence and transient behavior of tracking errors.
Furthermore, in recent years, the combination of backstepping control with neural network control or fuzzy logic systems has been widely applied to mitigate the impact of uncertainties in the system, such as [8, 10, 23, 28,29,30,31,32,33]. Thanks to the unique general approximation, adaptive capabilities, and learning abilities of radial basis function neural networks (RBFNNs), they can effectively approximate unknown continuous functions. In more specific terms, the design of adaptive control strategies utilizing RBFNNs to approximate unknown functions for nonlinear systems with unknown nonlinear functions was discussed in [8, 23, 29]. Moreover, a self-adaptive output feedback control scheme for nonlinear quantized system, developed based on the backstepping method and general approximation, was presented in [33].
In particular, when considering unknown input delay and fixed-time control, the design of the controller becomes more complex in the presence of uncertainties such as unknown control coefficients, unknown nonlinear functions, and external disturbances. To date, there appear to be no existing results to address these challenges. Therefore, inspired by the aforementioned discussion, this paper addresses the problem of fixed-time prescribed performance adaptive control for nonlinear systems with uncertainties including unknown input delay, unknown control coefficients and external disturbances. The contributions of this paper are highlighted as follows:
-
1.
We introduce a novel bounded estimation mechanism in the L-K functional to design adaptive parameters and combine it with the backstepping method. This marks the first consideration of the fixed-time prescribed performance adaptive tracking control problem for nonlinear systems with various uncertainties, including unknown coefficients, delay, nonlinear functions and external disturbances. Importantly, our proposed approach not only eliminates the reliance on priori knowledge of desired signal but also effectively enhances the disturbance rejection performance of the closed-loop system, further extending existing results as shown in [20, 34,35,36,37,38,39,40].
-
2.
In contrast to the existing work on unknown input delay [16, 23], this paper introduces a novel adaptive tracking scheme by incorporating a special funnel function and a logarithmic L–K functional. A key feature of our design is that it ensures globally prescribed transient performance, independent of initial conditions.
-
3.
To address the impact of unknown input delays, introduce a compensation system aimed at eliminating the effects of these delay while demonstrating the fixed-time stability of the compensator system. Furthermore, our approach does not rely on restrictive conditions such as bounded inputs or prior information about signals, and rigorously establishes the fixed-time stability of the compensation system. Different from the majority of current results with input delay, such as [10, 16, 23, 28, 41,42,43,44].
The paper is structured as follows: Sect. 2 presents the problem formulation and some preliminary results. The controller design and the stability analysis are detailed in Sect. 3. Section 4 presents the simulation examples. Lastly, the paper wraps up with the conclusion in Sect. 5.
2 Preliminary
2.1 Problem formulation
Consider a class of nth-order nonlinear systems
where the system state variable \( x=[x_1,x_2,...,x_n]^T \), \(u(t - \tau (t))\in R\) is the control input with input delay, \(\tau (t)\) denotes unknown time-varying input delay, r(t) is tracking error, y is the system output, \(y_r\) denotes the desired signal, the constants \(g_i\) is unknown and can take either positive or negative values for \(i=1,2,...,n\). \(f_i(x,t)\) and \({d_i}(x,t)\) represent the unknown smooth nonlinear function and unknown additive disturbance for \(i=1,2,...,n\), respectively. In the subsequent sections of the paper, when it is not misleading, nonlinear functions \(f_i(\cdot )\), \(d_i(\cdot )\), etc., will be abbreviated as \(f_i\), \(d_i\), etc.
The control objective of this paper is to design an adaptive controller for nonlinear system (1) such that
-
1.
All the closed-loop signals of the system are semi-globally fixed-time uniformly ultimately bounded;
-
2.
The tracking error r(t) will remain within a small bounded range of the origin in finite time;
-
3.
The tracking error r(t) can be guided to a predetermined accuracy set \( {\Theta _r} = \left\{ {r(t) \in { {R}}} \right. \ \left. {\left| {\left| {r(t)} \right| < \varepsilon } \right. } \right\} \) within a specified finite time \(T_k\), where both \(\varepsilon \) and \(T_k\) can be preassigned, ensuring the transient performance of r(t).
In order to achieve the control objective for system (1), we introduce the following assumptions and definition.
Assumption 1
The nonlinear external disturbance \({d_i}(x,t)\) is bounded by constants \(d_{im}>0\) for \(i=1,2,...,n\).
Assumption 2
The desired trajectory \({y_r}\) and its first derivative \({\dot{y}_r}\) exist and bounded.
Assumption 3
Without loss of generality, we assume that the signs of \(g_i\), where \(i = 1, 2,..., n\), are positive throughout this article.
Assumption 4
The input time-varying delay \(\tau (t)\) is bounded such that \(\tau (t)<\tau _{max}\) for all \(t\in R\) and slowly varying such that \({\dot{\tau }}(t)<{\bar{\mu }}<1\), where \(\tau _{max}\) and \({\bar{\mu }} \) are positive constants. Moreover, there exists a sufficiently accurate constant estimate \({\hat{\tau }}\in R \) of \( \tau \) which is available. Then defined \({\tilde{\tau }} \buildrel \Delta \over = \tau -{\hat{\tau }} \) and \({\tilde{\tau }}\) satisfies \( \left| {{\tilde{\tau }} } \right| \leqslant {\bar{\tau }}\) for all \(t\in R\) where \({\bar{\tau }}\) is a known positive constant.
Remark 1
Since the bounds on input delay are attainable in many applications, it is reasonable to assume that the maximum allowable error \(\bar{\tau }\) and error estimation \({\hat{\tau }}\) are known in Assumption 4. Such assumptions are common in addressing the problem of unknown time-varying input delay, as in [16].
Definition 1
[45] Consider the nonlinear system
where state vector \(x\in R^n\) and \(f: R^+\times R^n\rightarrow R^n\) is the nonlinear function. For any initial state x(0), if the solution of the system can converge to the set \(\Omega \) in finite time, then set \(\Omega \) is referred to as the system’s fixed-time attractor, i.e. \(\exists T_{max}\), such that for any \(t\geqslant T(x_0)\), \(x(t,x_0)\in \Omega \) where \(T(x_0)\leqslant T_{max}\). In particular, when \(\Omega =0\), the system is termed fixed-time stable at the origin.
Lemma 1
[46] For all \(x_0 \in R^n\), if there exists a globally radially unbounded and positive definite \(C^1\) function V(x), for some constants \(\alpha \), \(\beta \), p, q, \(k>0\) with \(0<pk<1\) and \(qk>1\), such that
holds, then the system (2) is globally fixed-time stable at the origin and the settling time function \(T (x_0)\) is satisfied
where \(m_p=\frac{1-pk}{q-p}>0\), \(m_q=\frac{qk-1}{q-p}>0\) and \(\Gamma (z):=\int ^{+\infty }_0 e^{-t}t^{z-1}dt\) denote the gamma function [47].
Lemma 2
[48] For \(x>0\), \(y>0\), \(m>0\), \(n>0\) and \(p>0\), which yields
Lemma 3
[49] For \(z_i\in R \), \(0\leqslant i \leqslant n\) and \(0\leqslant a\leqslant 1\), than
Lemma 4
[49] For \(x_i>0 \) and \(0\leqslant i\leqslant n\), such that
2.2 State transformation
The presence of unknown control coefficients \(g_i\) complicates the design of the controller for system (1). To facilitate the controller design, we introduce a linear transformation on the system state \(x_i\). Through this linear transformation, system (1) is transformed into a nonlinear system with only one unknown coefficient.
Define \(e_1=x_1\) and \(e_i=x_i/g_ig_{i+1}...g_n\), then we have
where \(a_0=g_1g_2...g_n\), \(\tilde{d_1}(x,t)=d_1(x,t)\), \(\tilde{d_i}(x,t)=d_i(x,t)/g_ig_{i+1}...g_n\) for \(i=2,3,...,n\), and \(\tilde{f_1}(x,t)=f_1(x,t)\), \(\tilde{f_i}(x,t)=f_i(x,t)/g_ig_{i+1}...g_n\) for \(i=2,3,...,n\). According to Assumption 3, we can easily get that there is a constant \({\bar{d}}_i>0\) such that \(\left| {{\tilde{d}}_i(x,t)} \right| \leqslant {\bar{d}}_i\).
2.3 Compensation system
To mitigate the impact of input delay in system (1), we introduce the following compensation system:
where \({{\hat{p}}_i}\) and \(p_i>0\) are designed parameters and the initial condition is \(\lambda _i(0) = 0\) for \(i=2,3,...,n\).
Remark 2
It is worth mentioning that:
-
1.
In the existing literature as in [23, 47, 50, 51], they have also investigated the adaptive control problem with input delay. These references introduced novel coordinate transformations to effectively compensate for the effects of input delay. However, the design approach mentioned above overlooked the impact of the compensation function on the stability of the closed-loop system, leading to certain limitations in the conclusions. In contrast, in this paper, we introduce an auxiliary system (9) to effectively eliminate the influence of time-varying input delay and the expression of the compensator system aids us in proving its fixed-time convergence property in subsequent sections.
-
2.
In the compensation system, the initial condition is set as \(\lambda _i(0) = 0\), which means that when there is no input delay in the system, \(\lambda _i\) remain zero, and thus it will not affect the controller design of system (1). When the input delay of the system is non-zero, we will utilize the compensation system to mitigate the impact of input delay.
-
3.
In the compensation system (9), there are signals related to u in the auxiliary system. In subsequent sections, we will demonstrate the boundedness of the input u, thereby obtaining the fixed-time boundedness of the auxiliary system (9).
2.4 Funnel constraint function
To impose transient behavior constraints on the system tracking error, inspired by [52,53,54], we define the funnel function as follows:
Definition 2
For any convergence time \(T_k \) and positive error precision \(\varepsilon \), a function taking non-negative values \(\mu (t) \in {\mathbb {R}}\) is called a funnel constraint function if it satisfies:
-
1.
\(\mu (0)=0\) and \(\mu (t) >0\) for all \(t>0\);
-
2.
\(\mu (t)\) and \({\dot{\mu }}(t)\) are bounded by positive constants \( \mu _d\) and \(\mu _{dm}\);
-
3.
there exist a time \(t_s\leqslant T_k\), such that \(\mu (t)\geqslant \frac{1}{\varepsilon }\) holds for all \(t>t_s\).
Then, the prescribed performance funnel can be defined as

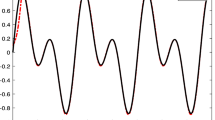
The trajectory of tracking error within the funnel
Remark 3
The tracking error evolution curve within the funnel is depicted in Fig. 1. By constructing an appropriate L-K functional, we confine the product of the tracking error r(t) and the funnel constraint function \(\mu (t)\) within F, thereby regulating the transient behavior of tracking error r(t). Moreover, there are various options for the specific expression of funnel constraint function \(\mu (t)\), such as
where \(0<\alpha <1\), \(\beta >0\) are design constants.
2.5 RBF neural networks
Radial basis function neural networks (RBFNNs) are widely used for the control and identification of nonlinear systems with uncertainties due to their ability to effectively approximate nonlinear functions [55, 56]. In this section, we will introduce the fundamental knowledge of RBFNNs to facilitate their use in the subsequent controller design process.
For any continuous unknown function f(Z), there exist suitable neural network \(W^{*T}S (Z)\) such that
where \(S(Z)=(s_1(Z),...,s_l(Z))\in R^l\) denote the basis function vector, where the Gaussian function \(s_i(Z) \) are defined as following:
where \(\sigma _i \) is the width of the Gaussian functions and \(\xi _i=[\xi _1,\xi _2,...,\xi _n]^T\) denotes the center of the receptive domain. Additionally, \(l > 1\) represents the number of nodes in the neural network, \(Z=[Z_1,Z_2,...,Z_q]^T\in \Omega _Z\in R\) represents the input vector, \(W =(w_1,...,w_l)\in R^l \) is the weight vector and \(\delta (Z)\) represents the approximation error which satisfies \(\left| {\delta (Z)}\right| \leqslant \varepsilon \) with \(\varepsilon >0\). The ideal weight vector \(W^*=[w_1,w_2,...,\) \(w_q]^T \in R^l\) is define as
3 Controller design and stability analysis
3.1 Controller design
In this section, we will utilize the backstepping method to provide the detailed procedure for designing fixed-time adaptive controller.
To begin with, by using system (8) and the compensator system (9), we introduce the following coordinate transformation:
where \({\alpha _{i - 1}}\) is the virtual controller that will be designed in the subsequent steps.
Step 1: According to (8) and (9), differentiating \(z_1\), one has
Then let the Lyapounov function be
where \(\beta _1\) and \(\gamma _1\) are positive design parameters, \({\hat{\theta }}_1=\theta _1-\theta _1^*\) and \({\hat{\eta }}_1=\eta _1-\eta _1^*\) are the estimation error with \( \theta _1^*\) and \( \eta _1^*\) represent the estimate of \( \theta _1\) and \( \eta _1\), respectively. The positivity definiteness and continuous differentiability of \(V_1\) for \( \left| {{z_1}} \right| < 1\) can be confirmed, establishing it as a suitable candidate for a Lyapunov function.
Further, by differentiating \( V_1\) with respect to t, we get
where \(F_1(Z_1)= (\mu (t)(\tilde{{f_1}}(x,t) - {{\dot{y}_r}}-a_0\lambda _2 ) +{\dot{\mu }} (t)({e_1} - {y_r}) )/a_0 \) and \(Z_1=[x_1,x_2,...,x_n,\mu ,{\dot{\mu }},y_r,\dot{y}_r,\lambda _2]^T\) and \(\chi =\frac{1}{{1 - z_1^2}}\).
Since \(F_1(Z_1)\) is an unknown continuous function, we will utilize RBFNNs from Sect. 2.5 to approximate \(F_1(Z_1)\). Therefore, by using RBFNNs in (13) and Young’s inequality, we infer that
where \(\theta _1= \left\| { W^{*T}_1} \right\| ^2 \), \(a_1>0\) is design parameter and \(\varepsilon _1\) is the upper bound of the estimation error.
Inserting the above inequality into (19), one has
where \( \mu _d>0\) is the upper bound of \(\mu \), \(\eta _1= (\frac{{\mu _d{\bar{d}}}_1}{a_0} + \varepsilon _1 )^2 \) and \(b_1>0\) is design parameter.
Remark 4
In contrast to the general approach in adaptive controllers for handling unknown external disturbances and NNs error, in this paper, we consider the unknown external disturbances \({\tilde{d}} _1\) and NNs error \({\varepsilon _1}\) as a collective uncertainty, and then introduce the estimate \(\eta _1\) to quantify this uncertainty. This approach not only eliminates the need for a priori knowledge of boundary information but also enhances the robustness of the closed-loop system.
Then, let the virtual control signal \(\alpha _1\) and the adaptive law be designed as
where \(m_1\), \(q_1\), \(r_1\), \(s_1\), \(K_1\) and \(L_1\) are positive design parameters and error \(r= e_1 - {y_r}\).
Then substituting (22)–(24) into (21), we arrive at
Noting that
Then we can rewrite (25) as
where \({\bar{\sigma }}_1= \frac{{{K_1}}}{2}+\frac{{{L_1}}}{4}+\frac{{{a_1}}}{2}+ \frac{{{b_1}}}{2}\).
Step 2: With the help of (8) and (9), differentiating \(z_2\), we deduce that
Define the Lyapounov function as follow
where the design parameters \(\beta _2>0\) and \(\gamma _2>0\), and the estimation errors are defined as \({\hat{\theta }}_2=\theta _2-\theta _2^*\) and \({\hat{\eta }}_2=\eta _2-\eta _2^*\) with \( \theta _2 ^*\) and \( \eta _2^*\) being the estimates of \( \theta _2\) and \( \eta _2\), respectively.
Thus, \(\dot{V}_2(t)\) can be derived from (27) and (28) that
where \(F_2(Z_2)= \tilde{{f_2}}(x,t) - {{{\dot{\alpha }}}_1} - {\hat{p}}_2 \lambda _2 - {p_2}{\lambda ^3 _2} \) and \(Z_2=[x_1,x_2,...,x_n,\theta _1^*,\eta _1^*,\lambda _2]^T\).
Similar to the calculation of (20), one can get
where \(\theta _2= \left\| { W^{*T}_2} \right\| ^2 \), \(a_2>0\) is design parameter and \(\varepsilon _2\) is the upper bound of identify error.
Substituting (30) into (29), we can get
where \(\eta _2= ({{{\bar{d}}}_2} + {\varepsilon _2} )^2 \) and \(b_2>0\) is design parameter.
Then, the virtual control signal \(\alpha _2\) and the adaptive law are designed as below
where \(m_2\), \(q_2\), \(r_2\), \(s_2\), \(K_2\) and \(L_2\) are positive design parameters.
Recalling the inequality in Lemma 2, one has
where \({\sigma _2}= \frac{1}{4} \times {(\frac{4}{3})^{ - 3}} \). Taking (32)–(35) into (31), yields
where \({\bar{\sigma }}_2=K_2{\sigma _2}+\frac{{{a_2}}}{2}+ \frac{{{b_2}}}{2}\).
Step i \((3\leqslant i\leqslant n-1)\): Based on (8) and (9), differentiating \(z_i\), we have
Then consider the following Lyapounov function defined as
where \(\beta _i \) and \(\gamma _i \) are the positive design parameters, and \({\hat{\theta _i}}=\theta _i-\theta _i^*\) and \({\hat{\eta _i}}=\eta _i-\eta _i^*\) are the estimation errors, \( \theta _i^*\) and \( \eta _i^*\) represent the estimates of unknown constants \( \theta _i\) and \( \eta _i\), respectively.
Differentiating \( V_i(t)\), yields that
where \(F_i(Z_i)= \tilde{{f_i}}(x,t) - {{{\dot{\alpha }}}_{i-1}} - {\hat{p}}_i \lambda _i - {p_i}{\lambda ^3 _i} \) and \(Z_i=[x_1,...,x_n,\theta _1^*,...,\theta _i^*,\eta _1^*,...,\eta _i^*,\lambda _2,...,\lambda _{i }]^T\).
Similar as in (20), we immediately get
where \(\theta _i= \left\| { W^{*T}_i} \right\| ^2 \), the design parameter \(a_i>0\) and \(\varepsilon _i>0\) is a constant.
Inserting (38) into (37), we can get
where \(\eta _i= ( {{{\bar{d}}}_i} + {\varepsilon _i})^2 \) and \(b_i \) is positive design parameter.
Next, we design the virtual controller \(\alpha _i\) and the adaptive law as follows
where \(m_i>0\), \(q_i>0\), \(r_i>0\), \(s_i>0\), \(K_i>0\) and \(L_i>0\) are design parameters.
Furthermore, holds (40)–(42) on the hand, one can rewrite (39) as
where \({\bar{\sigma }}_i=K_i{\sigma _i}+\frac{{{a_i}}}{2}+ \frac{{{b_i}}}{2}\).
Step n: Noting the definition on (8) and (9), differentiating \(z_n\), we deduce that
Consider the Lyapounov function candidate as
where the design parameters \(\beta _n>0\) and \(\gamma _n>0\), and \( \theta _n^*\), \( \eta _n^*\) denote the estimation of unknown constants \( \theta _n\) and \( \eta _n\), respectively, and \({\hat{\eta _n}}=\eta _n-\eta _n^*\), \({\hat{\theta _n}}=\theta _n-\theta _n^*\) mean the estimation errors.
Furthermore, the time derivative of \( V_n(t)\) can be calculated as follows:
where \(F_n(Z_n)= \tilde{{f_n}}(x,t) - {{{\dot{\alpha }}}_{n-1}} -{\hat{p}}_n\lambda _n-p_n\lambda ^3_n+( sign({z_n})- sign({\lambda _n}))\int _{t - {\hat{\tau }} }^{t - {\hat{\tau }} + {\bar{\tau }} } {\left| {\dot{u}(s)} \right| } ds \) and \(Z_n=[x_1,...,x_n,\theta _1^*,...,\) \(\theta _n^*,\eta _1^*,...,\eta _n^*,\lambda _2,...,\lambda _n]^T\).
Following the similar calculation process as in (20), we infer that
where the design parameters \(a_n \) and \(\varepsilon _n \) are positive constants, and \(\vartheta _n= \left\| { W^{*T}_n} \right\| ^2 \). Next, we estimate the first few terms in (45), and by utilizing Assumption 4, we can derive that
where \( sign(\cdot ) = \left\{ \begin{array}{l} 1,\cdot > 0,\\ 0,\cdot = 0,\\ - 1,\cdot < 0. \end{array} \right. \) Substituting (46)–(47) into (45), yields
where \(\eta _n= ({{{\bar{d}}}_n} + {\varepsilon _n} )^2 \) and \(b_n>0\) is design parameter.
Then, the actual controller u and the adaptive law are selected as
where \(m_n>0\), \(q_n>0\), \(r_n>0\), \(s_n>0\), \(K_n>0\) and \(L_n>0\) are design parameters.
In view of (49)–(51), we arrive at
where \({\bar{\sigma }}_n=K_n{\sigma _n}+\frac{{{a_n}}}{2}+ \frac{{{b_n}}}{2}\).
3.2 Stability analysis
Now we are in the position to the proof of Theorem 1.
Theorem 1
Suppose that Assumptions 1–4 hold. For systems (1) with unknown time-varying input delay and disturbance, an adaptive controller (49) coupled with the virtual controller (22), (32), (40) and the adaptive laws (23), (24), (33), (34), (41), (42), (50) and (51) exist. By appropriately choosing the function \(\mu (t)\) to meet Definition 2, the following assertions hold for any bounded initial states:
-
1.
All the closed-loop signals of the system are semi-globally fixed-time uniformly ultimately bounded;
-
2.
The tracking error r(t) will remain within a small bounded range of the origin in finite time if suitable design parameters are chosen;
-
3.
The tracking error r(t) can be guided to a predetermined accuracy set \( {\Theta _r} = \left\{ {r(t) \in R} \right. \ \left. {\left| {\left| {r(t)} \right| < \varepsilon } \right. } \right\} \) within a specified finite time \(T_k\), where both \(\varepsilon \) and \(T_k\) can be pre-set, ensuring the transient performance of r(t).
Proof
First, let us prove the first two assertions. Notice that for any \(1\leqslant i\leqslant n\), one has
Then, by differentiating \(V_n(t)\) with respect to t, we can derive that
In addition, with the help of Lemma 2, one gets
Moreover, utilizing Young’s inequality, we can deduce that
where \(w_j\) and \(v_j\) are positive design parameters.
Inserting (54)–(58) into (53), yields
where \(H_1:= \mathop {\min }\limits _{1 \leqslant j \leqslant n} \{ {(2a_0)^{\frac{3}{4}}}{K_1},{2^{\frac{3}{4}}}{K_j},m_j^{\frac{3}{4}},q_j^{\frac{3}{4}}\} \), \( {H_2}: = \mathop {\min }\limits _{1 \leqslant j \leqslant n} \{4a_0 ^{2}{L_1}, 4{L_j},{r_j}(1 - \frac{{9{w^{\frac{4}{3}}}}}{4}),{s_j}(1 - \frac{{9{v^{\frac{4}{3}}}}}{4})\} \) and \({{\mathcal {F}}}= \sum \limits _{j = 1}^n {{{{\bar{\sigma }} }_j}} + \sum \limits _{j = 1}^n {(\frac{3}{{4{w^4}}} + \frac{1}{{12}})\frac{{\theta _j^4}}{{\beta _j^2}}} + \sum \limits _{j = 1}^n {(\frac{3}{{4{v^4}}} + \frac{1}{{12}})\frac{{\eta _j^4}}{{\gamma _j^2}}} + \sum \limits _{j = 1}^n {\frac{1}{{2{\beta _j}}}\theta _j^2} + \sum \limits _{j = 1}^n {\frac{1}{{2{\gamma _j}}}\eta _j^2} + \frac{1}{2} \times {(\frac{3}{4})^3} + \frac{K_1}{4} \times {(\frac{3}{4})^3}\).
By using Lemmas 3 and 4, we conclude that
where \(0<\varepsilon _1<1\). Therefore, according to inequality (60), for \(V_n \leqslant n{{\mathcal {F}}}/H_2\), we have the boundedness of \(V_n \). Furthermore, if \(V_n > n{{\mathcal {F}}}/H_2\), one can obtain
where \(\sigma =H_1\) and \(\nu = (1-\varepsilon _1) \frac{H_2}{n}\). Thus, according to Lemma 1, \(V_n \) is bounded, and the settling time can be set as
Review the expression for \(V_n \), we have the boundedness of \(z_i\), \({\hat{\theta _i}}\) and \({\hat{\eta _i}}\) for \(i=1,2,...,n\). And owing to the initial value \(z_1(0)=\mu (0)r(0)=0<1\), which means that for all \(t \geqslant 0\), \(z_1(t)\) strictly within the set \(\Omega _{z_1} = \left\{ {{z_1}(t) \in R\left| {\left| {{z_1}(t)} \right| < 1} \right. } \right\} \). As r(0) is bounded and \(\mu (t)>0\) for \(t>0\), \(r(t)=z_1(t)/\mu (t)\) is well defined and bounded. Hence, \(\chi \) and the virtual controller \(\alpha _i\) are bounded. Moreover, the estimated parameters \(\theta ^*_i=\theta _i-{\hat{\theta _i}}\) and \(\eta ^*_i=\eta _i-{\hat{\eta _i}}\) are bounded due to the boundedness of \(\theta _i\), \({\hat{\theta _i}}\), \(\eta _i\), \({\hat{\eta _i}}\) for \(i=1,2,...,n\). Besides, since u is made up of bounded signals, we get the boundedness of u.
Next, we will prove the fixed-time boundedness of the compensator system \(\lambda _i\). To begin with, consider the following Lyapounov function as
Recalling the definition in (9), we can infer that
Furthermore, based on the boundedness of u, we have the following fact
where \(h_u>0\) is a constant and \(\epsilon _2\) is a design parameter. Thus, putting (64) into (63), yields
where \(\sigma _1=P_1=\mathop {\min }\limits _{3 \leqslant i \leqslant n-1} \left\{ {{{{\hat{p}}}_2} - \frac{1}{2}}, {{{{\hat{p}}}_i} - 1}, {{{\hat{p}}}_n} -\frac{1}{2}\right. \left. - \frac{1}{{{ 4\epsilon _2}}} \right\} \), \(P_2= \mathop {\min }\limits _{2\leqslant i \leqslant n} \left\{ {p_i} \right\} \), \(\zeta = {\epsilon _2}h_u^2 +\frac{nP_1}{4} \times {(\frac{3}{4})^{ 3}} \) and \(\nu _1= \frac{(1 - {\epsilon _1}){P_2}}{n}\). Therefore, we immediately observe the fixed-time boundedness of compensation system, and the fixed time can be given as
Therefore, based on coordinate transformation (16), we immediately get the boundedness of \(e_i\) and \(x_i\) for \(i=1,2,...,n\). Then we get the conclusion that all the closed-loop signals of the system are semi-globally fixed-time uniformly ultimately bounded.
Next, we proceed to prove the third assertion. Building upon the previous analysis where we have established that \(z_1 \in \Omega _{z_1} \), we now recall the definition and properties of \(\mu (t)\) to obtain \( {\left| {r(t)} \right| <\frac{1}{\mu (t)}\leqslant \varepsilon } \) for all \(t>t_s\). This implies that the tracking error r(t) can be guided to a pre-specified accuracy region \( (-\varepsilon , \varepsilon )\) within the specified finite time \(t_s\leqslant T_k\).
Remark 5
Due to the presence of unknown time delay in the system input, these delays cannot be explicitly expressed, meaning that direct introduction of approximations or upper bound of unknown delay to eliminate its impact is not feasible. Given the unknown nature of the delay, neither coordinate transformations nor delay compensation within the controller can be employed. Therefore, in this paper, compensation for the unknown delay is achieved by introducing an additional compensator system using an input u containing approximation and approximation error. Furthermore, the integral term ensures the boundedness of the compensator system in fixed-time. Particularly, the compensator system described in this paper can also be applied to scenarios with known input delay by replacing \(u(t - {\hat{\tau }} )\) and \(sign({\lambda _n})\int _{t - {\hat{\tau }} }^{t - {\hat{\tau }} + {\bar{\tau }} } {\left| {\dot{u}(s)} \right| } ds\) in the compensator system with \(u(t-\tau (t))\), thus directly compensating for the effects of known input time delay.
Remark 6
The existing methods for nonlinear systems with input delay as in [28, 41,42,43,44, 57] were not applicable to address unknown delay. This paper, however, has obtained fixed-time control results through compensation systems and the construction of a novel L-K functional. In comparison to asymptotic control, fixed-time control offers rapid convergence, high precision, and independence from initial conditions. Additionally, the transient behavior constraint method designed here is applicable to more complex systems, as well as scenarios where reference signal information is not provided in advance or where the desired trajectories are generated by online planners and measurement devices. Typical applications include missile attitude control systems, spacecraft control [58], intelligent driving systems, and so on.
Remark 7
In the control method proposed in this paper, while ensuring globally specified transient performance, it eliminates most of the initial condition-dependent restrictions in most prescribed performance bound-based results and the requirement for any high-order \((n \geqslant 2)\) derivatives of \(y_r\), relaxing the conditions in related results such as [34,35,36,37].
3.3 Corollary
According to the proof process of the previous Theorem 1, even when saturation exists in the input delay of a nonlinear system, we can still draw conclusions regarding fixed-time control. Therefore, in this section, we introduce input saturation to the system (1) with unknown input delay, and consider the following system:
where the definition of system variables is the same as in (8), and let the system saturation be
where \({\bar{u}}\) and \({\tilde{u}}\) are positive known constants.
Assumption 5
[29, 59] For given system input with saturation and time-varying delay, as well as the nonlinear system (67), there are feasible actual input control thresholds and the controller u, allowing the system output y to track the desired trajectory \(y_r\).
First of all, owing to the presence of unknown time delay and input saturation in the system (67), the compensator system (9) will be modified as follows:
where \(p_i>0\) are designed parameters and the initial condition is \(\lambda _i(0) = 0\).
Then, the coordinate transformations can be given as
where \({\alpha _{i - 1}}\) is the virtual controller.
Similar to the design process in Sects. 3.1 and 3.2, we can also apply the backstepping method to obtain the controller design for the i-th step \((1 \leqslant i < n)\). Therefore, for the sake of brevity and readability, we will not delve into the specific design process here. However, in the design of the n-th step, due to the consideration of input saturation in the system, unlike the previous design methods, we will focus on introducing the design process for step n.
Step n: Based on (67) and (69), differentiating \(w_n\), one has
Let the Lyapounov function be
where \(\varsigma _n>0\) and \(\xi _n>0\) are the design parameters,\({\hat{\vartheta _n}}=\vartheta _n-\vartheta _n^*\), \({\hat{\mu _n}}=\mu _n-\mu _n^*\) denote the estimation errors and \( \vartheta _n^*\), \( \mu _n^*\) represent the estimation of \( \vartheta _n\) and \( \mu _n\), respectively.
Further, by differentiating \( V_n(t)\) with respect to t, we can derive
where \(F_n(Z_n)= \tilde{{f_n}}(x,t) - {{{\dot{\alpha }}}_{n-1}} -{\hat{p}}_n\lambda _n-p_n\lambda ^3_n \) and \(Z_n=[x_1,...,x_n,\vartheta _1^*,...,\) \(\vartheta _n^*,\mu _1^*,...,\mu _n^*,\lambda _2,...,\lambda _n]^T\).
Then, similar as in (46), one obtains
where \(\theta _n= \left\| { W^{*T}_n} \right\| ^2 \), the design parameter \(a_n>0\) and \(\varepsilon _n>0\) is constant. Next, we estimate the first few terms in (72), then by using Assumption 4, we can deduce that
Remark 8
It is worth noting that we do not employ the method for handling unknown time delay as described in Sect. 3.1 here. This is because, in the presence of input saturation, it is challenging to construct integral terms associated with unknown time delay and requires a case-by-case discussion. However, fortunately, when input saturation exists, we can estimate the input with unknown time delay by utilizing the upper and lower bounds of the saturation existing in the system input.
Substituting the above inequalities into (72), yields
where \(\mu _n= ({{{\bar{d}}}_n} + {\varepsilon _n} )^2 \) and \(b_n>0\) is design parameter.
Given the actual controller u and the adaptive law be designed as
where the design parameters \(m_n \), \(q_n \), \(r_n \), \(s_n \), \(K_n \) and \(L_n \) are positive.
Together with (43) and (76)–(78), yields
where \({\bar{\sigma }}_n=K_n{\sigma _n}+\frac{{{a_n}}}{2}+ \frac{{{b_n}}}{2}\).
In accordance with the above design and the proof of Theorem 1, we immediately obtain the following theorem:
Theorem 2
Suppose that Assumptions 1–5 hold. For systems (67) with disturbance, unknown time-varying input delay and saturation, an adaptive controller (76) coupled with the virtual controller and the adaptive laws (77) and (78) exist, ensuring that all the closed-loop signals of the system are semi-globally uniformly ultimately bounded in fixed time. By choosing appropriate function \(\mu (t)\) to satisfy Definition 2, for any bounded initial states, the following facts hold:
-
1.
All the closed-loop signals of the system are semi-globally fixed-time uniformly ultimately bounded;
-
2.
The tracking error r(t) will remain within a small bounded range of the origin in finite time if suitable design parameters are chosen;
-
3.
The tracking error r(t) can be guided to a predetermined accuracy set \( {\Theta _r} = \left\{ {r(t) \in R\left| {\left| {r(t)} \right| < \varepsilon } \right. } \right\} \) within a specified finite time \(T_k\), where both \(\varepsilon \) and \(T_k\) can be pre-set, ensuring the transient performance of r(t).
Proof
Please refer to Theorem 1 for detail.
4 Numerical example
In this section, we will present the following simulation examples to demonstrate the performance of the designed controller. Furthermore, we will conduct comparisons to highlight the innovativeness and contribution of our research results.
4.1 Example 1
Consider the nonlinear system with input delay in [60] as follows
where \(g_1=2\), \(g_2=g_3=1\), unknown function, disturbance are defined as \(f_1=sin(x_1 x_3)\), \(f_2= x_1^2x_3e^{x_2}\), \(f_3= x_1 x_2e^{x_3}\), \(d_1=x_3\), \(d_2= 0\), \(d_3= x_3sin(x_1x_2)\), respectively. To facilitate a direct comparison with the literature [60] under identical conditions, we will simulate based on the design procedures outlined in [60]. Then the initial conditions are selected as \([x_1(0),x_2(0),x_3(0)]^T=[0.01,0,0]^T\), and the desired trajectory \(y_r(t)\) is chosen as \(y_r=0.5sint+0.5sin(0.5t)\). The performance of the system output, based on the parameters and controller design from [60], is illustrated in Figs. 2, 3.

The trajectory of y and \(y_r\) in [60] when \(\tau =0.02\)

The trajectory of y and \(y_r\) in [60] when \(\tau =0.03\)
It is evident from Figs. 2, 3 that as the input delay increases, the controller described in the aforementioned literature may exhibit growth and oscillations. Consequently, under large input delay (\(\tau \geqslant 0.03\)), the state of the nonlinear system may experience an unbounded scenario. Next, we will use the scheme proposed in this paper for numerical simulation. Firstly, the compensation system is given by
The design parameters are set as \(m_1=10\), \(m_2=m_3=20\), \(q_1=4\), \(q_2=q_3=16\), \(r_1= r_2=4\), \(r_3=4\), \(s_1=40\), \(s_2=20\), \(s_3=10\), \(a_1=1\), \(a_2=a_3=5\), \(b_1= b_2=1\), \(b_3=0.5\), \(\beta _1 =2\), \(\beta _2=\beta _3=8\), \(K_1=K_2=0.5\), \(K_3=9\), \(L_1=0.2\), \(L_2=5\), \(L_3=3\), \(\gamma _1=20\), \(\gamma _2=10\), \(\gamma _3=5\), \( p_2= 2\), \({\hat{p}}_2=5\), \( p_3= 1.5\), \({\hat{p}}_3=2\), \({\hat{\tau }}=\bar{\tau }=0.04\), \(T_k=4 \) seconds, \(\varepsilon =0.18\). And the initial condition are select as \([{\hat{\theta }}_1(0),{\hat{\theta }}_2(0),{\hat{\theta }}_3(0)]^T=[{\hat{\eta }}_1(0),{\hat{\eta }}_2(0),{\hat{\eta }}_3(0)]^T=[0,0,0]^T\). Then, the results of the numerical simulation are shown in the pictures below.

Output y and desired trajectory \(y_r\) when \(\tau =0.04\)

Output y and desired trajectory \(y_r\) when \(\tau =0.03+0.02sint\)

The trajectory of tracking error r(t)
It can be observed from Figs. 4 and 5 that our designed adaptive tracking controllers, whether the input delay is constant or time-varying, are capable of effectively tracking the desired trajectory \(y_r\) with minimal error, demonstrating excellent tracking performance. Furthermore, we can observe from Fig. 6 that when we set \(T_k=4\) and \(\varepsilon =0.18\), the system error r(t) can satisfy the predetermined transient performance criteria .

The trajectories of state \(x_2\), \(x_3\) and input u
The operational trajectories of the compensation system \(\lambda _2\), \(\lambda _3\), the adaptive laws \({\hat{\theta }}_1 \), \({\hat{\theta }}_2\), \({\hat{\theta }}_3\) and \({\hat{\eta }}_1 \), \({\hat{\eta }}_2\), \({\hat{\eta }}_3\) and system state \(x_2\), \(x_3\), input u are depicted in Figs. 7, 8, 9 and 10, demonstrating that all signals of the closed-loop system are bounded.

The trajectory of compensation system \(\lambda _2\) and \(\lambda _3\)

The trajectory of adaptive parameters \({\hat{\theta }}_1 \), \({\hat{\theta }}_2 \) and \({\hat{\theta }}_3\)

The trajectory of adaptive parameters \({\hat{\eta }}_1 \), \( {\hat{\eta }}_2 \) and \({\hat{\eta }}_3\)

The trajectory of \([x_1(0), x_2(0),, x_3(0)]=[0.05, 0.1,0.1]\)
Then, setting \(w^{\frac{4}{3}}=v^{\frac{4}{3}}=\frac{2}{9}\), \(\varepsilon _1=\frac{1}{4}\), we have \(\sigma =2^{-\frac{1}{4}}\) and \(\nu =1.25\). By reviewing (61), we can calculate the setting time \(T_m\) as
To demonstrate that our designed controller can achieve fixed-time tracking control, we now present the tracking trajectories for initial values \([x_1(0), x_2(0), x_3(0)]\) set at [0.05, 0.1, 0.1], [0.5, 0.6, 0.2], and [0.7, 0.2, 0.3] in Figs. 11, 12 and 13. The time required for achieving bounded tracking will not exceed the settling time \(T_m\) .

The trajectory of \([x_1(0), x_2(0)]=[0.5, 0.6,0.2]\)

The trajectory of \([x_1(0), x_2(0),x_3(0)]=[0.7, 0.2,0.3]\)
It is evident from the above three figures that as the initial value increases, the time T required for achieving bounded tracking also increases, yet all remain below 4.9 s, not exceeding the settling time \(T_m\). This indicates that our controller can achieve the goal of fixed-time tracking control without depending on the initial value.
4.2 Example 2
Considering the following nonlinear system with input saturation
with compensation system
The design parameters are set as \(m_1=2\), \(m_2=2\), \(q_1=12\), \(q_2=4\), \(r_1=2\), \(r_2=4\), \(s_1=20\), \(s_2=40\), \(a_1=25/3\), \(a_2=2.5\), \(b_1=1\), \(b_2=2\), \(\beta _1 =\beta _2=2\), \(K_1=4\), \(K_2=3\), \(L_1=10\), \(L_2=5\), \(\gamma _1=10\), \(\gamma _2=20\), \( p_2= {\hat{p}}_2=2\), \(T_k=3 \) seconds, \(\varepsilon =0.1\). Let the initial condition are select as \([x_1(0),x_2(0)]^T=[0.05,0.1]^T\), \([{\hat{\theta }}_1(0),{\hat{\theta }}_2(0)]^T=[0,0.1]^T\) and \([{\hat{\eta }}_1(0),{\hat{\eta }}_2(0)]^T=[0.1,0.05]^T\), \(y_r=0.5sint+0.25sin(0.5t)\) and the saturation threshold set to \({\bar{u}} =4.5\) and \({\tilde{u}}=2.5\). The numerical simulation results are shown in the following picture.

Output y and desired trajectory \(y_r\)

The trajectory of tracking error r(t)

The trajectory of system input u with saturation
From Figs. 14, 15 and 16, it can be observed that our adaptive controller remains effective in the presence of unknown input delay and input saturation in nonlinear systems, as the output y can closely track the desired trajectory \(y_r\). And the tracking error r(t) satisfies the specified transient performance.
Therefore, the numerical simulation experiments above validate the effectiveness of the controller we have designed.
5 Conclusion
The study has investigated the fixed-time tracking control problem for uncertain nonlinear systems with unknown input delay, nonlinear function and external disturbances. Initially, the impact of unknown input delay have been mitigated by introducing a compensation system, and a specific funnel function has been constructed to constrain the transient performance of tracking error. Subsequently, new adaptive parameters have been introduced into the Lyapunov-Krasovskii functional to address unknown disturbances, along with a novel bounded estimation method and radial basis function neural network to handle system uncertainties. An adaptive controller is designed using backstepping method to demonstrate the fixed-time boundedness of all signals in the closed-loop system and ensure the transient behavior of tracking error. Finally, the effectiveness of the proposed method has been validated through numerical simulations.
Data availability
The authors confirm that all the data supporting the findings of this study are available in the Numerical Example section of the paper.
References
Downey, R, Kamalapurkar, R, Fischer, N, Dixon, W: Compensating for fatigue-induced time-varying delayed muscle response in neuromuscular electrical stimulation control. In: Recent Results on Nonlinear Delay Control Systems: in Honor of Miroslav Krstic, pp. 143–161. Springer (2015)
Merad, M., Downey, R.J., Obuz, S., Dixon, W.E.: Isometric torque control for neuromuscular electrical stimulation with time-varying input delay. IEEE Trans. Control Syst. Technol. 24(3), 971–978 (2015)
Li, D.-J., Shu-Min, L., Liu, Y.-J., Li, D.-P.: Adaptive fuzzy tracking control based barrier functions of uncertain nonlinear MIMO systems with full-state constraints and applications to chemical process. IEEE Trans. Fuzzy Syst. 26(4), 2145–2159 (2017)
Zhang, M., Jing, X., Wang, G.: Bioinspired nonlinear dynamics-based adaptive neural network control for vehicle suspension systems with uncertain/unknown dynamics and input delay. IEEE Trans. Ind. Electron. 68(12), 12646–12656 (2020)
Sharma, N., Bhasin, S., Wang, Q., Dixon, W.E.: Predictor-based control for an uncertain Euler–Lagrange system with input delay. Automatica 47(11), 2332–2342 (2011)
Asl, M.M., Valizadeh, A., Tass, P.A.: Delay-induced multistability and loop formation in neuronal networks with spike-timing-dependent plasticity. Sci. Rep. 8(1), 12068 (2018)
Pongvuthithum, R., Rattanamongkhonkun, K., Lin, W.: Asymptotic regulation of time-delay nonlinear systems with unknown control directions. IEEE Trans. Autom. Control 63(5), 1495–1502 (2017)
Ma, J., Xu, S., Cui, G., Chen, W., Zhang, Z.: Adaptive backstepping control for strict-feedback non-linear systems with input delay and disturbances. IET Control Theory Appl. 13(4), 506–516 (2019)
Wang, H., Liu, S., Yang, X.: Adaptive neural control for non-strict-feedback nonlinear systems with input delay. Inf. Sci. 514, 605–616 (2020)
Li, H., Wang, L., Haiping, D., Boulkroune, A.: Adaptive fuzzy backstepping tracking control for strict-feedback systems with input delay. IEEE Trans. Fuzzy Syst. 25(3), 642–652 (2016)
Kamalapurkar, R., Fischer, N., Obuz, S., Dixon, W.E.: Time-varying input and state delay compensation for uncertain nonlinear systems. IEEE Trans. Autom. Control 61(3), 834–839 (2015)
Deng, W., Yao, J., Ma, D.: Time-varying input delay compensation for nonlinear systems with additive disturbance: an output feedback approach. Int. J. Robust Nonlinear Control 28(1), 31–52 (2018)
Khanesar, M.A., Kaynak, O., Yin, S., Gao, H.: Adaptive indirect fuzzy sliding mode controller for networked control systems subject to time-varying network-induced time delay. IEEE Trans. Fuzzy Syst. 23(1), 205–214 (2014)
Jain, A.K., Bhasin, S.: Tracking control of uncertain nonlinear systems with unknown constant input delay. IEEE/CAA J. Autom. Sin. 7(2), 420–425 (2019)
Yang, Y., Zhang, H.H.: Neural network-based adaptive fractional-order backstepping control of uncertain quadrotors with unknown input delays. Fractal Fract. 7(3), 232 (2023)
Obuz, S., Klotz, J.R., Kamalapurkar, R., Dixon, W.: Unknown time-varying input delay compensation for uncertain nonlinear systems. Automatica 76, 222–229 (2017)
Liu, W., Ma, Q., Xu, S.: Event-triggered adaptive output-feedback control for nonlinearly parameterized uncertain systems with quantization and input delay. IEEE Trans. Cybern. 53(10), 6690–6699 (2023)
Huang, C., Yu, C.: Global adaptive controller for linear systems with unknown input delay. IEEE Trans. Autom. Control 62(12), 6589–6594 (2017)
Hua, C., Li, Y., Guan, X.: Finite/fixed-time stabilization for nonlinear interconnected systems with dead-zone input. IEEE Trans. Autom. Control 62(5), 2554–2560 (2016)
Wang, F., Lai, G.: Fixed-time control design for nonlinear uncertain systems via adaptive method. Syst. Control Lett. 140, 104704 (2020)
Hu, X., Li, Y.-X., Hou, Z.: Event-triggered fuzzy adaptive fixed-time tracking control for nonlinear systems. IEEE Trans. Cybern. 52(7), 7206–7217 (2020)
Chen, M., Wang, H., Liu, X.: Adaptive fuzzy practical fixed-time tracking control of nonlinear systems. IEEE Trans. Fuzzy Syst. 29(3), 664–673 (2019)
Zhai, J., Wang, H., He, Z.: Fixed-time tracking control for high-order nonlinear systems with unknown time-varying input delay. Appl. Math. Comput. 452, 128027 (2023)
Bechlioulis, C.P., Rovithakis, G.A: Prescribed performance adaptive control of SISO feedback linearizable systems with disturbances. In: 2008 16th Mediterranean Conference on Control and Automation, pp. 1035–1040. IEEE (2008)
Lee, J.G., Trenn, S.: Asymptotic tracking via funnel control. In: 2019 IEEE 58th Conference on Decision and Control (CDC), pp. 4228–4233. IEEE (2019)
Zhao, K., Song, Y., Chen, C.P., Chen, L.: Adaptive asymptotic tracking with global performance for nonlinear systems with unknown control directions. IEEE Trans. Autom. Control 67(3), 1566–1573 (2021)
Kanakis, G.S., Rovithakis, G.A.: Guaranteeing global asymptotic stability and prescribed transient and steady-state attributes via uniting control. IEEE Trans. Autom. Control 65(5), 1956–1968 (2019)
Li, D.P., Liu, Y.J., Tong, S., Chen, C.P., Li, D.J.: Neural networks-based adaptive control for nonlinear state constrained systems with input delay. IEEE Trans. Cybern. 49(4), 1249–1258 (2018)
Ma, J., Xu, S., Zhuang, G., Wei, Y., Zhang, Z.: Adaptive neural network tracking control for uncertain nonlinear systems with input delay and saturation. Int. J. Robust Nonlinear Control 30(7), 2593–2610 (2020)
Li, Y.-X.: Barrier Lyapunov function-based adaptive asymptotic tracking of nonlinear systems with unknown virtual control coefficients. Automatica 121, 109181 (2020)
Li, S., Ahn, C.K., Xiang, Z.: Sampled-data adaptive output feedback fuzzy stabilization for switched nonlinear systems with asynchronous switching. IEEE Trans. Fuzzy Syst. 27(1), 200–205 (2018)
Qi, W., Yang, X., Park, J.H., Cao, J., Cheng, J.: Fuzzy SMC for quantized nonlinear stochastic switching systems with semi-Markovian process and application. IEEE Trans. Cybern. 52(9), 9316–9325 (2021)
Wang, F., Chen, B., Lin, C., Zhang, J., Meng, X.: Adaptive neural network finite-time output feedback control of quantized nonlinear systems. IEEE Trans. Cybern. 48(6), 1839–1848 (2017)
Liu, C., Liu, X., Wang, H., Gao, C., Zhou, Y., Lu, S.: Event-triggered adaptive finite-time prescribed performance tracking control for uncertain nonlinear systems. Int. J. Robust Nonlinear Control 30(18), 8449–8468 (2020)
Zhou, S., Song, Y.: Prescribed performance neuroadaptive fault-tolerant compensation for MIMO nonlinear systems under extreme actuator failures. IEEE Trans. Syst. Man Cybern. Syst. 51(9), 5427–5436 (2019)
Berger, T.: Fault-tolerant funnel control for uncertain linear systems. IEEE Trans. Autom. Control 66(9), 4349–4356 (2020)
Wang, W., Wen, C.: Adaptive actuator failure compensation control of uncertain nonlinear systems with guaranteed transient performance. Automatica 46(12), 2082–2091 (2010)
Wang, H., Zhu, Q.: Finite-time stabilization of high-order stochastic nonlinear systems in strict-feedback form. Automatica 54, 284–291 (2015)
Chen, C.-C., Sun, Z.-Y.: A unified approach to finite-time stabilization of high-order nonlinear systems with an asymmetric output constraint. Automatica 111, 108581 (2020)
Xie, X.-J., Li, G.-J.: Finite-time output-feedback stabilization of high-order nonholonomic systems. Int. J. Robust Nonlinear Control 29(9), 2695–2711 (2019)
Chengwei, W., Liu, J., Jing, X., Li, H., Ligang, W.: Adaptive fuzzy control for nonlinear networked control systems. IEEE Trans. Syst. Man Cybern. Syst. 47(8), 2420–2430 (2017)
Cao, L., Pan, Y., Liang, H., Huang, T.: Observer-based dynamic event-triggered control for multiagent systems with time-varying delay. IEEE Trans. Cybern. 53(5), 3376–3387 (2022)
Li, K., Hua, C., You, X., Guan, X.: Finite-time observer-based leader-following consensus for nonlinear multiagent systems with input delays. IEEE Trans. Cybern. 51(12), 5850–5858 (2020)
Yue, H., Gong, C.: Adaptive tracking control for a class of stochastic nonlinearly parameterized systems with time-varying input delay using fuzzy logic systems. J. Low Freq. Noise Vib. Active Control 41(3), 1192–1213 (2022)
Filippov, A.F.: Differential Equations with Discontinuous Righthand Sides: Control Systems, vol. 18. Springer, Berlin (2013)
Aldana-López, R., Gómez-Gutiérrez, D., Jiménez-Rodríguez, E., Sánchez-Torres, J.D., Defoort, M.: Enhancing the settling time estimation of a class of fixed-time stable systems. Int. J. Robust Nonlinear Control 29(12), 4135–4148 (2019)
Erdélyi, A.: Higher transcendental functions. In: Higher Transcendental Functions, p. 59 (1953)
Khalil, H.: Nonlinear Systems. Prentice-Hall, Hoboken (2002)
Qian, C., Lin, W.: Non-Lipschitz continuous stabilizers for nonlinear systems with uncontrollable unstable linearization. Syst. Control Lett. 42(3), 185–200 (2001)
Na, J., Huang, Y., Wu, X., Shun-Feng, S., Li, G.: Adaptive finite-time fuzzy control of nonlinear active suspension systems with input delay. IEEE Trans. Cybern. 50(6), 2639–2650 (2019)
You, F., Chen, N., Zhu, Z., Cheng, S., Yang, H., Jia, M.: Adaptive fuzzy control for nonlinear state constrained systems with input delay and unknown control coefficients. IEEE Access 7, 53718–53730 (2019)
Zhang, Z., Dong, Y., Duan, G.: Global asymptotic fault-tolerant tracking for time-varying nonlinear complex systems with prescribed performance. Automatica 159, 111345 (2024)
Berger, T., Ilchmann, A., Ryan, E.P.: Funnel control of nonlinear systems. Math. Control Signals Syst. 33, 151–194 (2021)
Berger, T., Lê, H.H., Reis, T.: Funnel control for nonlinear systems with known strict relative degree. Automatica 87, 345–357 (2018)
Park, J., Sandberg, I.: Universal approximation using radial basis function networks. Neural Comput. 3(2), 46–257 (2008)
Sanner, R.M., Slotine, J.J.E.: Gaussian networks for direct adaptive control. IEEE Trans. Neural Netw. 3(6), 837–863 (1992)
Shi, C., Liu, Z., Dong, X., Chen, Y.: A novel error-compensation control for a class of high-order nonlinear systems with input delay. IEEE Trans. Neural Netw. Learn. Syst. 29(9), 4077–4087 (2017)
Jiang, B., Qinglei, H., Friswell, M.I.: Fixed-time attitude control for rigid spacecraft with actuator saturation and faults. IEEE Trans. Control Syst. Technol. 24(5), 1892–1898 (2016)
Chen, M., Tao, G., Jiang, B.: Dynamic surface control using neural networks for a class of uncertain nonlinear systems with input saturation. IEEE Trans. Neural Netw. Learn. Syst. 26(9), 2086–2097 (2014)
Yang, Z., Zhang, X., Zong, X., Wang, G.: Adaptive fuzzy control for non-strict feedback nonlinear systems with input delay and full state constraints. J. Frankl. Inst. 357(11), 6858–6881 (2020)
Funding
The authors have not disclosed any funding.
Author information
Authors and Affiliations
Contributions
H.Z.W performed the conceptualization, methodology, formal analysis and editing of the manuscript.
Corresponding author
Ethics declarations
Conflict of interest
The authors have no Conflict of interest to declare that are relevant to the content of this article.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Hua, Z. Fixed-time prescribed performance tracking for nonlinear systems with unknown time-varying input delay. Nonlinear Dyn (2024). https://doi.org/10.1007/s11071-024-10247-0
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11071-024-10247-0