
Abstract
This paper proposes an adaptive stabilization control scheme for a class of multivariable interconnected nonlinear systems with nonlinear parametrization. It is a systematic result in a sense that the proposed control scheme is a general one that also applies to systems with linear parametrization, without changing the controller structure. A novel integrated framework is built by means of a functional bounding technique for handling nonlinear parameter/structure uncertainties, a modified backstepping method for designing continuous state-feedback controllers, and Lyapunov stability analysis for stabilizing interconnected system states and parameter estimates. A commonly physical simulation and a representative numerical simulation are presented, and their results demonstrate the effectiveness of the proposed control scheme.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
In the real world, many nonlinear engineering systems have complex multivariable properties and uncertainties, such as aircraft [1], robotic arms [2], and chemical processes [3]. To effectively control these systems and improve their control performance, researchers have been exploring various control strategies [4,5,6,7,8,9,10,11,12,13,14]. In many practical applications, control systems of some physical models have uncertain dynamics with nonlinear parametrization, which may affect the control performance of systems and even cause safety issues. For example, an aircraft control system may have system uncertainties to lead to an imprecise result under unknown flight conditions [6]. Therefore, to solve these problems, it is essential to put forward a control method for a class of uncertain multivariate systems with nonlinearly parametrized dynamics, so the designed adaptive controller can achieve the desired control performance.
Based on the available literature [7,8,9,10,11,12,13], globally asymptotic stability is difficult to achieve for nonlinearly parametrized multivariable systems with structure and parameter uncertainties. In [12], the designed controller can achieve a globally asymptotically stable performance, but it only takes into account SISO systems. When the multivariable characteristics of control systems are considered, some literature neglects the existence of nonlinearly parametrized dynamics [14, 15]. Indeed, there is also some literature considering both nonlinearly parametrized dynamics and multiple variables: one solution is to propose an adaptive fuzzy control strategy, such as [4, 7], and the other solution is to propose a neural network-based control strategy, such as [5, 11]. However, these approximation methods only ensure semi-global stability of nonlinearly parametrized multivariate systems, and they have a common limitation that asymptotical performance fails to be achieved.
Although some attempts have been made in this field, there are still some challenges and problems to be solved. Therefore, our objective is to propose a new adaptive control scheme to ensure the closed-loop signals global boundedness and achieve asymptotic convergence for a class of uncertain multivariable systems with nonlinear parametrization.
With the aim of achieving the objective, before designing adaptive controllers, nonlinearly parametrized dynamics in each subsystem are handled with the help of a function bounding technique, which can be estimated as a known function signal multiplied by an unknown parameter signal. Then an adaptive backstepping control method is applied to uncertain multivariable systems to design state-feedback controllers and adaptive laws, which achieves a globally asymptotic convergence of system state variables to origin. The following two aspects are the contributions of this paper:
(i) With the help of a function bounding technique, the parametrized upper-bound growth of nonlinearly parametrized dynamics are obtained in order to satisfy a matching condition which is used for adaptive control schemes. Therefore, the original system is controlled by processing a parametrized upper bound, instead of directly dealing with the nonlinearly parametrized dynamics.
(ii) Compared with fuzzy and neural network control strategies, this paper proposes a new adaptive control scheme for handling nonlinearly parametried dynamics and stabilizing interconnected system states, which ensures all the state variables globally asymptotic convergence to origin.
The remainder of this paper is structured. Section 2 gives uncertain nonlinearly parametrized multivariable systems, some lemmas, and propositions used in the adaptive controller design process. Section 3 details the design process of the adaptive controller and the stability analysis. Section 4 verifies the feasibility of the designed controller by physical simulation and numerical simulation, respectively. Section 5 summarizes the conclusion.
2 Preliminaries and problem formulation
2.1 Problem Formulation
This paper considers the following nonlinearly para-metrized multivariable interconnected systems with str-ucture and parameter uncertainties
where \(\bar{z}_{r,q}=[z_{r,1}, z_{r,2},\ldots , z_{r,q}]^{T}\in \mathbb {R}^q\), \(z_{r,q}\) is the q-th state variable of the r-th subsystem, and \(u_r\) is a control input for the r-th subsystem. For \(r=1,\ldots ,l, q=1,\ldots ,n_{r}\), \(g_{r,q}(\cdot )=k_{r,q}^{*}\varphi _{r,q}(\cdot )\ne 0\) is an unknown control coefficient, where parameter \(k_{r,q}^{*}>0\) is unknown, function \(\varphi _{r,q}(\cdot )\) is known, and \(f_{r,q}(\cdot )\in \mathbb {C}^1\) is a nonlinearly parametrized function with \(f_{r,q}(0)=0\). \(n_{r}\) is a system order of the r-th subsystem. In this paper, it is assumed that all state variables can be measured, and make \(n_{r}=n, r=1,2,\ldots ,l\), without loss of generality. Without confusion, sometimes the independent variables of the function are omitted, such as demitting f(z) as \(f(\cdot )\) or f.
Control objective. Using a function bounding technique and an adaptive backstepping design method, a state feedback control scheme is developed for a class of uncertain multivariable interconnected systems with nonlinearly parametrized dynamics, so that all states are globally bounded and asymptotically converge to the origin.
Remark 1
Many real-world systems conform to the characteristics of the system (1), such as aircraft [1], robotic arms [2], and UAVs [16]. They all play an important role in promoting economic growth, promoting scientific and technological innovation, and improving the quality of life, so the system we study is meaningful.
Remark 2
Considering the parameter uncertainties, th-ere are two commonly used approaches for the design of an adaptive controller: a direct approach and an indirect approach. If a direct adaptive control approach is applied to the system (1) to estimate the controller parameter directly, the estimated error is not obtained from the nominal controller. If an indirect adaptive control approach is applied to the system (1), matching parameters calculated from a design equation using an online estimate cannot be obtained. Therefore, a novel adaptive control method needs to be proposed to overcome the nonlinearly parametrized dynamics of the system (1).
2.2 Preliminaries
This subsection lists some lemmas and propositions used in control design and their proofs can refer to relevant references [17,18,19].
Lemma 1
[17] For arbitrarily real-valued continuous function h(u, v), where \(u\in \mathbb {R}^n, v\in \mathbb {R}^m\), there is a scalar smooth function \(a(u)\ge 0\), \(b(v)\ge 0\), \(c(u)\ge 1\), \(d(v)\ge 1\) satisfying
Lemma 2
[18] Let \(y:\mathbb {R}^n \rightarrow \mathbb {R}\) be continuously differentiable at every point u within an open set \(S\subset \mathbb {R}^n\). For \( \forall u, v\in S\), there is a point \(w\in S\) such that
Lemma 3
[19] Given a pair of constants \(m\ge 1\) and \(n\ge 1\) to satisfy the relation \(\frac{1}{m}+\frac{1}{n}=1\), for any \(a\in \mathbb {R}\), \(b\in \mathbb {R}\) and all \(\epsilon >0\) satisfy
Before designing state-feedback controllers and adaptive laws, we give a property of nonlinearly parametrized function \(f_{r,q}(\cdot )\) which is concluded as the following proposition.
Proposition 1
For continuously differentiable functions \(f_{r,j}(\cdot )\) and \(f_{r,n}(\cdot )\), \(r=1,\ldots ,l\), \(j=1,\ldots ,n-1\) in the system (1), for the following equalities hold
where smooth functions \(\gamma _{r,j}(\cdot )\) and \(\gamma _{r,n}(\cdot )\) are known, and constants \(\theta ^*_{r,j}\) and \(\theta ^*_{r,n}\) are unknown.
Proof
According to \(f_{r,j}(0)=0\) and Lemma 2, we have
where \(b_{r,j}(\cdot )\) is a continuous function. It follows from Lemma 1 that there are a known function \(\gamma _{r,j}(\cdot )\) and an unknown parameter \(\theta ^*_{r,j}\) such that
Substituting (7) into (6) yields the bounds of functions \(f_{r,j}(\cdot )\) and \(f_{r,n}(\cdot )\) in the form below:
At this point, the proposition is proved. \(\square \)
Remark 3
For the choice of \(\gamma _{ij}\), we give some guidelines. Due to space limit, we only choose \(\gamma _{11}\) of the two subsystems as an example. Since \(f_{11}(x_{11},x_{21})\) is a continuously differentiable function, it follows from Lemma 1 that there exist \(\sigma _{11},\sigma _{21}\in [0,1]\) such that
where \(A(x_{11},x_{21})\) is a continuous function. With Lemma 1, we obtain \(A(x_{11},x_{21})\le \gamma _{11}(x_{11},x_{21})\theta _{11}^*\), where \(\gamma _{11}(x_{11},x_{21})\) is a smooth function and \(\theta _{11}^*\) is an unknown parameter. Therefore, from \(f_{11}(0,0)=0\) and (9) we have \(f_{11}(x_{11},x_{21})\le (|x_{11}|+|x_{21}|)\gamma _{11}(x_{11},x_{21})\theta _{11}^*\).
3 Adaptive control design
3.1 Redefinition of unknown parameters
For the convenience of control design, a new unknown parameters \(\Theta ^*_{r,j}, r=1,\ldots ,l, j=1,\ldots ,n\), are redefined as
where \(\theta ^*_{r,j}\) is given in (5) and \(k^*_{r,j}\) is an unknown parameter defined in the control coefficient \(g_{r,j}(\cdot )\). From (10), it can be seen that the redefined parameters \(\Theta ^*_{r,j}, r=1,\ldots ,l, j=1,\ldots ,n\), include all of the unknown system parameters. Compared with [20], this paper possesses an advantage, that is, there is no need for prior knowledge of the bounds of the redefined parameters, thereby making the system more reasonable.
3.2 Coordinate transformations
Coordinate transformations need to be performed on the original system. For the r-th subsystem (\(r=1,\ldots ,l\)), virtual control signals \(\alpha _{r,0},\alpha _{r,1},\ldots ,\alpha _{r,s-1}\),\(s=2,3,\ldots ,n\), and state errors \(\xi _{r,1},\xi _{r,2},\ldots ,\xi _{r,s}\) are defined as (12)–(14), where functions \(\psi _{r,s-1}(\cdot )\) are known, whose forms will be given later. There is a parameter estimate vector defined by \(\bar{\hat{\Theta }}_{r,s}=[\hat{\Theta }_{r,1},\ldots ,\hat{\Theta }_{r,s}]^T\), where \(\hat{\Theta }_{r,s}\) is an estimate of \(\Theta ^*_{r,s}\), whose derivation will be determined later.
3.3 Adaptive control design
The adaptive control design process is carried out with the help of a backstepping method.
Step 1: Select the following candidate Lyapunov function
where constant \(k^*_{r,1}\) is unknown in the control coefficient \(g_{r,1}(\cdot )\), and \(\tilde{\Theta }_{r,1}=\Theta _{r,1}^*-\hat{\Theta }_{r,1}\) is a parameter estimate error with \(\hat{\Theta }_{r,1}\) being an estimate of unknown constant \(\Theta _{r,1}^*\) defined in (10). According to (1) and coordinate transformations, the time derivative of \(V_{r,1}\) is
According to (1), (5), (10), coordinate transformations and Lemma 3, we have
Substituting (17) into (16), we have
where \(p_{r,1}\) is a positive design parameter, \(c_{r,1}=2\) is a constant, and \(\eta _{r,1}(\cdot )=(l+r-1+\sum _{i=1}^{r-1}\psi _{i,1}^2)\gamma _{r,1}^2\) is a known function.
Choosing the following virtual control signal \(\alpha _{r,1}\) and adaptive law \(\dot{\hat{\Theta }}_{r,1}\)
where \(\psi _{r,1}(\cdot )=\frac{1}{\xi _{r,1}\varphi _{r,1}}\big (p_{r,1}\xi _{r,1}+\xi _{r,1}\eta _{r,1}\hat{\Theta }_{r,1}\big )\), we have
Step 2: Select the following candidate Lyapunov function
where constant \(k^*_{r,2}\) is unknown in the control coefficient \(g_{r,2}(\cdot )\), \(\tilde{\Theta }_{r,2}=\Theta _{r,2}^*-\hat{\Theta }_{r,2}\) is a parameter estimate error with \(\hat{\Theta }_{r,2}\) being an estimate of unknown constant \(\Theta _{r,2}^*\) defined in (10). According to (1) and coordinate transformations, the time derivative of \(V_{r,2}\) is
According to (1), (5), (10), coordinate transformations and Lemma 3, we have
where \(\bar{\omega }_{i,j}^{(r,2)}=\big (\frac{\partial \alpha _{r,1}}{\partial z_{i,j}}\big )^2\), \(i=1,\ldots ,l\), \(j=1,2\), are known functions, \(\zeta _{i,j}=\xi _{i,j+1}^2+\xi _{i,j}^2+\sum _{v=1}^{i-1}\sum _{w=1}^{j+1}(\xi _{v,w}^2+\xi _{v,w-1}^2)\) \(+\sum _{v=i}^{l}\sum _{w=1}^{j}(\xi _{v,w}^2+\xi _{v,w-1}^2)\) and \(\lambda _{i,j}=(1+\psi _{i,j}^2)\varphi _{i,j}^2+\sum _{v=1}^{i-1}\sum _{w=1}^{j+1}(1+\psi _{v,w-1}^2)\gamma _{i,j}^2+\sum _{v=i}^{l}\sum _{w=1}^{j}(1+\psi _{v,w-1}^2)\) \(\gamma _{i,j}^2\).
Substituting (24), (25) into (23), we have
where \(p_{r,2}\) is a positive design parameter, \(c_{r,2}=2(l+r)+2\) is a constant, and \(\eta _{r,2}(\cdot )\) is the following known function,
Virtual control signal \(\alpha _{r,2}\) and adaptive law \(\dot{\hat{\Theta }}_{r,2}\) are chosen as follows
where \(\psi _{r,2}(\cdot )=\frac{1}{\xi _{r,2}\varphi _{r,2}}\big (\xi _{r,1}\varphi _{r,1}+p_{r,2}\xi _{r,2}+\xi _{r,2}\eta _{r,2}\hat{\Theta }_{r,2}\big )\), we have
Step s-1 (s=3,...,n-1): Assuming that there exist a virtual control signal \(\alpha _{r,s-1}\) and a adaptive law \(\dot{\hat{\Theta }}_{r,s-1}\) making the candidate Lyapunov function
satisfy the following inequality
where constant \(k^*_{r,s-1}\) is unknown in the control coefficient \(g_{r,s-1}(\cdot )\), \(c_{r,s-1}=\frac{(s^2-s-2)(l+r)+4}{2}\) is a constant, \(p_{r,j}\) is a positive design parameter, and \(\tilde{\Theta }_{r,s-1}=\Theta _{r,s-1}^*-\hat{\Theta }_{r,s-1}\) is a parameter estimate error with \(\hat{\Theta }_{r,s-1}\) being an estimate of \(\Theta _{r,s-1}^*\) defined in (10).
Then we will prove the inequality (32) still holds in Step s.
Step s: Select the following candidate Lyapunov function
where constant \(k^*_{r,s}\) is unknown in the control coefficient \(g_{r,s}(\cdot )\), \(\tilde{\Theta }_{r,s}=\Theta _{r,s}^*-\hat{\Theta }_{r,s}\) is a parameter estimate error with \(\hat{\Theta }_{r,s}\) being an estimate of unknown constant \(\Theta _{r,s}^*\) defined in (10). According to (1) and coordinate transformations, the time derivative of \(V_{r,s}\) is
According to (1),(5),(10), coordinate transformations and Lemma 3, we have
where \(\bar{\omega }_{i,j}^{(r,s)}=\big (\frac{\partial \alpha _{r,s-1}}{\partial z_{i,j}}\big )^2\), \(i=1,\ldots ,l\), \(j=1,\ldots ,s\), are known functions, \(\zeta _{i,j}\) and \(\lambda _{i,j}\) are given in (25). Substituting (35), (36), into (34), we have
where \(p_{r,s}\) is a positive design parameter, \(c_{r,s}=\frac{1}{2}[(s^2+s-2)(l+r)+4]\) is a constant, and \(\eta _{r,s}(\cdot )\) is the following known function
Choosing the following virtual control signal \(\alpha _{r,s}\) and adaptive law \(\hat{\Theta }_{r,s}\)
where \(\psi _{r,s}(\cdot )\!=\!\frac{1}{\xi _{r,s}\varphi _{r,s}}\big (\xi _{r,s-1}\varphi _{r,s-1}\!+\!p_{r,s}\xi _{r,s}\!+\!\xi _{r,s}\eta _{r,s}\hat{\Theta }_{r,s}\big )\), we have
So far, we have proved that the inequality (32) still holds in Step s.
Step n: For the n-th differential equation of the r-th subsystem, select the following candidate Lyapunov function
Design actual adaptive control signals
to ensure
where \(c_{r,n}=\frac{(n^2+n-2)(l+r)+4}{2}\) is a constant, \(p_{r,n}\) is a positive design parameter, \(\eta _{r,n}(\cdot )\) and \(\psi _{r,n}(\cdot )\) are known functions as follows
Remark 4
During the control design procedure of the r-th subsystem, \(r=1,\ldots ,l\), the virtual control signals \(\alpha _{r,1},\ldots ,\alpha _{r,n-1}\) will be designed in in the first \(n-1\) steps, and the actual control signal \(u_{r}\) will be designed in Step n. First, at the first step designing \(\alpha _{1,1}\) for the first subsystem, then designing \(\alpha _{2,1}\) for the second subsystem, and then designing \(\alpha _{r,1}\) for the r-th subsystem in turn. After the first step of all the subsystems have been designed, the second step is carried out for the first subsystem, and then the second step is carried out for the second subsystem, and so on in turn. Finally, the actual controller \(u_1\) is designed at the n-th step for the first subsystem, and the actual controller \(u_r\) at the n-th step for the r-th subsystem subsystem. A step-by-step algorithm during the control design is shown in Fig. 1.

The design order of adaptive control scheme
Remark 5
In the design process, the difference with SISO systems is that there will be some state variables in the other subsystems, which will be scaled up using Young’s inequality, and finally dealt with in the last step.
Remark 6
There are a lot of design parameters used in the design process, and these design parameters can be conveniently used to adjust the control speed according to practical situation. For example, if follows from (45) that the larger the design parameter \(p_{r,j}\), the faster the convergence speed, which will be verified in the simulation section.
3.4 Stability analysis
The following theorem gives a globally bounded result of closed-loop signals and parameter estimations and an asymptotic convergence property of system state variables.
Theorem 1
For the nonlinearly parametrized multivariable system (1), the state-feedback controller \(u_{r}, r=1,\ldots ,l\), defined in (43) and the adaptive law \(\dot{\hat{\Theta }}_{r,j}, r=1,\ldots ,l, j=1,\ldots ,n\), defined in (20), (29), (40), (44), ensures that all closed-loop signals are globally bounded and system state variables asymptotically converge to origin.
Proof
: Globally bounded result. For the multivariable system (1) with nonlinear parametrization, the Lyapunov function is chosen as
then according to the control design procedure, we have
where \(c_{r,n}\) is a known constant, and \(p_{r,j}\) is a design parameter satisfying \(p_{r,j}>\frac{1}{4}\sum ^{l}_{r=1}c_{r,n}\).
We choose a new design parameter \(p_{r,j}\) such that
where C is a positive constant. Thus, inequality (49) can be written as
Because \(V\ge 0\) and \(\dot{V}\le 0\), and V(t) is a nonincreasing function of t, we have
where \(\xi _{r,j}(0)\) and \(\tilde{\Theta }_{r,j}(0)\) are bounded, so we can conclude closed-loop signals \(\xi _{r,j}(t)\) and \(\tilde{\Theta }_{r,j}(t)\) are bounded. According to \(\tilde{\Theta }_{r,j}(t)=\Theta _{r,j}^*(t)-\hat{\Theta }_{r,j}(t)\) and boundness of \(\tilde{\Theta }_{r,j}(t)\), we have \(\hat{\Theta }_{r,j}(t)\) is bounded. Therefore, the closed-loop system signals and parameter estimations are globally bounded.
Asymptotical convergence result. According to coordinate transformations, the smoothness of the state error \(\xi _{r,j}\) and the virtual control signal \(\alpha _{r,j-1}\) ensure the global boundedness of the state variable \(z_{r,j}\). Moreover, the boundedness of \(z_{r,j}\) and \(\hat{\Theta }_{r,j}\) implies boundedness of their derivatives \(\dot{z}_{r,j}\) and \(\dot{\hat{\Theta }}_{r,j}\), where \(r=1,\ldots ,l,j=1,\ldots ,n\), so that \(\dot{\xi }_{r,j}\) is also bounded according to coordinate transformations. Due to (51) and (52), we have
According to Barbalat’s Lemma, we obtain \(\lim _{t \rightarrow \infty }\)
\(\xi _{r,j}(t)=0\), thereby we have \(\lim _{t \rightarrow \infty }z_{r,j}(t)=0\) from coordinate transformations. Therefore, the state variables of the system asymptotically converge to the origin. \(\square \)
4 Simulation study
In this section, we respectively give a physical simulation and a numerical simulation to verify the rationality of the designed adaptive control scheme.
4.1 A physical simulation
A system constructed by two inverted pendulums and two carts is considered [21]. The configuration is shown in Fig. 2.

Two inverted pendulums on carts
Plant model. The dynamical equation of the inverted pendulum can be described as:
where \(\theta _1\) and \(\theta _2\) represent the angles of pendulums, \(\dot{\theta }_1\) and \(\dot{\theta }_2\) separately denote the angular velocities of the two pendulums. \(u_1\) and \(u_2\) denote the control torque imposed to the pendulums, k and g denote the spring and gravity constants, respectively. The pendulum mass is denoted by m, and the car mass is denoted by M. \(\chi _1\) and \(\chi _2\) represent the trajectories of two carts, and \(c=\frac{m}{M+m}\) is an intermediate constant. a(t) is a function with t as an independent variable and \(a(t)\in [0,l]\). Due to external environment, sensor aging and poor sensor contact, the sensors may fail during the measurement [22]. Therefore, the state variables \(\theta _1\) and \(\theta _2\) can be diagnosed by the following formulas \(\beta _1=k_1\theta _1\) and \(\beta _2=k_2\theta _2\), where \(k_1\in (0,1]\) and \(k_2\in (0,1]\) are unknown parameters.
Simulation system. Define \(x_{11}=\beta _1\), \(x_{12}=\dot{\beta }_1\), \(x_{21}=\beta _2\), \(x_{22}=\dot{\beta }_2\), then the dynamic equation can be represented by the following equations
where \(b_{11}=1\), \(b_{12}=\frac{k_1}{cml^2}\), \(b_{21}=1\), \(b_{22}=\frac{k_2}{cml^2}\), \(f_{12}=\frac{g}{cl}x_{11}-\frac{m}{Mk_1}x_{12}^2sin\left( \frac{1}{k_1}x_{11}\right) +\frac{k_1k[a(t)-cl]}{cml^2}\left[ \frac{-a(t)}{k_1}x_{11}+\frac{a(t)}{k_2}x_{21}-\chi _1+\chi _2 \right] \), \(f_{22}=\frac{g}{cl}x_{21}-\frac{m}{Mk_2}x_{22}^2sin\left( \frac{1}{k_2}x_{21}\right) +\frac{k_2k[a(t)-cl]}{cml^2}\Big [\frac{-a(t)}{k_2}x_{21}+\frac{a(t)}{k_1}x_{11}+\chi _1-\chi _2\Big ]\). Because \(k_1\in (0,1]\) and \(k_2\in (0,1]\) are unknown parameters, \(f_{12}\) and \(f_{22}\) are nonlinearly parametrized dynamics. Together with the form of control coefficients \(b_{12}\) and \(b_{22}\), the system (54) satisfies characteristics of the system (1) studied above.
Simulation results. Define the following coordinate transformation
From the above adaptive control design procedure, virtual controllers are designed as \(\alpha _{11}=-\xi _{11}\psi _{11}\), \(\alpha _{21}=-\xi _{21}\psi _{21}\), and the actual controllers and the adaptive laws are designed as
where \(\psi _{11}=\frac{1}{b_{11}}p_{11}\), \(\psi _{21}=\frac{1}{b_{21}}p_{21}\), \(\eta _{12}=\psi _{11}^2(1+\psi _{11}^2)b_{11}^2+\gamma _{12}^2\), \(\eta _{22}=\psi _{21}^2(1+\psi _{21}^2)b_{21}^2+\gamma _{22}^2\), \(\gamma _{12}=\frac{g}{cl}+\frac{m}{M}x_{12}^2+\frac{k(1-cl)(3+L)}{cml^2}\), \(\gamma _{22}=\frac{g}{cl}+\frac{m}{M}x_{22}^2+\frac{k(1-cl)(3+L)}{cml^2}\) are known parameters.
For simulation, the values of system parameters are \(M=10kg\), \(m=10\,kg\), \(k=1N/m\), \(l=1\,m\), \(g=1N\), \(c=\frac{1}{2}\), \(a(t)=sin(5t)\), \(\chi _1=sin(2t)\), \(\chi _2=sin(3t)+2\). The initial condition is chosen as \(x_{11}(0)=5\), \(x_{12}(0)=4\), \(x_{21}(0)=2\), \(x_{22}(0)=6\), \(\hat{\Theta }_{12}(0)=2\), \(\hat{\Theta }_{22}(0)=5\). Choose three sets of controller parameters \([p_{11},p_{12},p_{21},p_{22}]^T\) as \([\frac{7}{4},\frac{5}{4},\frac{7}{4},\frac{5}{4}]^T,[3,5,5,3]^T,[10,8,10,6]^T\). Select different parameters and comparing the simulation results in the figure below to verify the description of Remark 6. In the case of three different controller parameters, the simulation results of the state variables \(x_{11}, x_{12}, x_{21}, x_{22}\) are shown in Fig. 3, the trajectories of the parameter estimates \(\Theta _{12}, \Theta _{22}\) are shown in Fig. 4 and the trajectories of the system inputs \(u_{1}, u_{2}\) are shown in Fig. 5.

The trajectories of state variables \(x_{11}\), \(x_{12}\), \(x_{21}\), \(x_{22}\)

The trajectories of parameter estimates \(\hat{\Theta }_{12}\) and \(\hat{\Theta }_{22}\)

The trajectories of control inputs \(u_1\) and \(u_2\)
All simulation results verify the desired control performance: the state variables of the system are globally bounded and asymptotically converge to the origin and the convergence rate is affected by design parameters. To better demonstrate the effectiveness of the control scheme for such systems, the following numerical simulation is considered.
4.2 A numerical simulation
The nonlinearly parametrized system with two subsystems is considered
where \(g_{11}=a(2+x_{11}^2)\), \(g_{12}=b(2+x_{11}^2x_{21}^2)\), \(g_{21}=c(1+2x_{21}^2)\), \(g_{22}=d(1+4x_{12}^2x_{22}^2)\), a, b, c, d, \(\lambda \), \(\theta _{11}\), \(\theta _{12}\), \(\theta _{21}\), \(\theta _{22}\) are unknown parameters, and \(f_{11}=3sin(\theta _{11}x_{11})\), \(f_{12}=2\theta _{12}x_{11}^2x_{21}\), \(f_{21}=4sin(\theta _{21}x_{11}x_{21})\), \(f_{22}=2x_{21}sin\)
\((\theta _{22}x_{22})+\lambda x_{21}e^{-\theta _{22}x_{22}}\), \([f_{11}(0),f_{12}(0),f_{21}(0),f_{22}(0)]=[0,0,0,0]\). Coordinate transformations are defined as
According to the above controller design process, control inputs and adaptive laws are designed as
where virtual controllers \(\alpha _{11}=-\xi _{11}\psi _{11}\),\(\alpha _{21}=-\xi _{21}\psi _{21}\), \(\psi _{11}=\frac{1}{\varphi _{11}}(p_{11}+\gamma _{11}^2\hat{\Theta }_{11})\), \(\psi _{21}=\frac{1}{\varphi _{21}}(p_{21}+\gamma _{21}^2\hat{\Theta }_{21})\), \(\varphi _{11}=2+x_{11}^2\), \(\varphi _{12}=2+x_{11}^2x_{21}^2\), \(\varphi _{21}=1+2x_{21}^2\), \(\varphi _{22}=1+4x_{12}^2x_{22}^2\), \(\gamma _{11}=3\), \(\gamma _{12}=2x_{11}^2+1\), \(\gamma _{21}=4\sqrt{x_{21}^2+1}\), \(\gamma _{22}=2\sqrt{x_{22}^2+1}+0.01(1+e^{x_{22}^2})\), \(\eta _{12}=\gamma _{12}^2+\big (\frac{\partial \alpha _{11}}{\partial x_{11}}\big )^2\big ((1+\psi _{11}^2)\varphi _{11}^2+\gamma _{11}^2\big )+\Big (\frac{\partial \psi _{11}}{\partial \hat{\Theta }_{11}}\dot{\hat{\Theta }}_{11}\Big )^2\), and \(\eta _{22}=\gamma _{22}^2+\big (\frac{\partial \alpha _{21}}{\partial x_{21}}\big )^2\big ((1+\psi _{21}^2)\varphi _{21}^2+\gamma _{21}^2\big )+\Big (\frac{\partial \psi _{21}}{\partial \hat{\Theta }_{21}}\dot{\hat{\Theta }}_{21}\Big )^2\).
We set initial conditions \(x_{11}=6\), \(x_{12}=3\), \(x_{21}=0.1\), \(x_{22}=0.1\), \(\hat{\Theta }_{11}=2\), \(\hat{\Theta }_{12}=1\), \(\hat{\Theta }_{21}=1\), \(\hat{\Theta }_{22}=3\), choose system parameters \(a=2\), \(b=2\), \(c=3\), \(d=1\), \(\lambda =0.01\), \(\theta _{11}=1.5\), \(\theta _{12}=3\), \(\theta _{21}=2\), \(\theta _{22}=2\), and design parameters \(p_{11}=\frac{5}{2}\), \(p_{12}=\frac{5}{4}\), \(p_{21}=2\), \(p_{22}=\frac{5}{4}\). The simulation results are shown in the red solid line in Fig. 6, 7 and 8, it is obvious that all the states are asymptotically converging to origin.
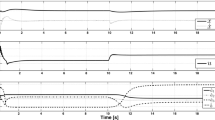
Under the same initial conditions, using a neural network control method, the controllers are designed as \(u_{1c}=-\frac{1}{g_{12}}(\xi _{11}g_{11}+\hat{\Theta }_{12c}\phi _{12}-\dot{\alpha }_{11})\), \(u_{2c}=-\frac{1}{g_{22}}(\xi _{21}g_{21}+\hat{\Theta }_{22c}\phi _{22}-\dot{\alpha }_{21})\), and the adaptive laws are designed as \(\dot{\hat{\Theta }}_{11c}=\xi _{11}\phi _{11}-\sigma _{11}\hat{\Theta }_{11c}\), \(\dot{\hat{\Theta }}_{12c}=\xi _{12}\phi _{12}-\sigma _{12}\hat{\Theta }_{12c}\), \(\dot{\hat{\Theta }}_{21c}=\xi _{21}\phi _{21}-\sigma _{21}\hat{\Theta }_{21c}\), \(\dot{\hat{\Theta }}_{22c}=\xi _{22}\phi _{22}-\sigma _{22}\hat{\Theta }_{22c}\), where \(\phi _{11}\), \(\phi _{12}\), \(\phi _{21}\), \(\phi _{22}\) are chosen as the commonly used Gaussian functions, and \(\sigma _{11}\), \(\sigma _{12}\), \(\sigma _{21}\), \(\sigma _{22}\) are positive design parameters. The simulation results are shown in the blue dashed line in Fig. 6, 7. 8. We can clearly see from the figures that the control method of this paper can make state variables globally asymptotic converge to the origin, while the method of the neural network can only converge to an interval, so the control method of this paper is better.

The trajectories of state variables with two methods

The trajectories of parameter estimates with two methods

The trajectories of control inputs with two methods
5 Conclusion
A new adaptive method is used to effectively solve a class of uncertain multivariate systems with nonlinear parametrization in this paper. Adaptive controllers are designed so that all state variables of a closed-loop system are globally bounded and asymptotic convergence to the origin. The results show that by adjusting design parameters appropriately, the degree of convergence of the system can be improved. The simulation result verifies the rationality of the proposed control method on the system. In future work, we will solve a class of adaptive control problems for the same system when system state variables are unmeasurable.
Data Availability
No datasets were generated or analysed during the current study.
References
Yang, S.H., Tao, G., Jiang, B., Zhen, Z.Y.: Practical output tracking control for nonlinearly parameterized longitudinal dynamics of air vehicles. J. Frankl. Inst. 357, 12380–12413 (2020)
Shang, D.Y., Li, X.P., Yin, M., Li, F.J.: Dynamic modeling and fuzzy adaptive control strategy for space flexible robotic arm considering joint flexibility based on improved sliding mode controller. Adv. Space Res. 70(11), 3520–3539 (2002)
Liu, X.P., Jutan, A., Rohani, S.: Almost disturbance decoupling of MIMO nonlinear systems and application to chemical processes. Automatica 40(3), 465–471 (2004)
Gao, D.X., Sun, Z.Q., Luo, X., Du, T.R.: Fuzzy adaptive control for hypersonic vehicle via backstepping method. Control Theory Appl. 25(5), 805–810 (2008)
Xu, B., Gao, D.X., Wang, S.X.: Adaptive neural control based on HGO for hypersonic flight vehicles. Sci. China 54(3), 511–520 (2011)
Zhang, Y.N., Li, Y., Su, D., Jin, L.: Advanced flight control system failure states airworthiness requirements and verification. Proced. Eng. 80(3), 431–436 (2014)
Chen, B., Liu, X.P., Tong, S.C.: Adaptive fuzzy output tracking control of MIMO nonlinear uncertain systems. IEEE Trans. Fuzzy Syst. 15(2), 287–300 (2007)
Ma, Y.J., Jiang, B., Tao, G., Cheng, Y.H.: Uncertainty decomposition based fault-tolerant adaptive control of flexible spacecraft. IEEE Trans. Aerosp. Electron. Syst. 51(2), 1053–1068 (2015)
Jiang, B., Zhang, K., Shi, P.: Integrated fault estimation and accommodation design for discrete-time Takagi-Sugeno fuzzy systems with actuator faults. IEEE Trans. Fuzzy Syst. 19(2), 291–304 (2011)
Mao, Z.H., Jiang, B., Shi, P.: Fault-tolerant control for a class of nonlinear sampled-data systems via a Euler approximate observer. Automatica 46(11), 1852–1859 (2010)
Ge, S.Z., Wang, C.: Adaptive neural control of uncertain MIMO nonlinear systems. IEEE Trans. Neural Netw. 15(3), 674–692 (2004)
Li, G.: Adaptive quantized control for a class of high-order nonlinear systems. Int. J. Robust Nonlinear Control 33(14), 8124–8141 (2023)
Jiang, B., Shen, Q.K., Shi, P.: Neural-networked adaptive tracking control for switched nonlinear pure-feedback systems under arbitrary switching. Automatica 61, 119–125 (2015)
Qasem, O., Davari, M., Gao, W.N., Kirk, D.R., Chai, T.Y.: Hybrid iteration ADP algorithm to solve cooperative, optimal output regulation problem for continuous-Time, linear, multiagent systems: theory and application in islanded modern microgrids with IBRs. IEEE Trans. Industr. Electron. 71(1), 834–845 (2024)
Tong, S.C., Sui, S., Li, Y.M.: Fuzzy adaptive output feedback control of MIMO nonlinear systems with partial tracking errors constrained. IEEE Trans. Fuzzy Syst. 23(4), 729–742 (2015)
El Hamidi, K., Mjahed, M., El Kari, A., Ayad, H., El Gmili, N.: Design of hybrid neural controller for nonlinear MIMO system based on NARMA-L2 model. IETE J. Res. 69(5), 3038–3051 (2023)
Lin, W., Qian, C.J.: Adaptive control of nonlinearly parameterized systems: the smooth feedback case. IEEE Trans. Autom. Control 47(8), 1249–1266 (2002)
Lang, S.: Real analysis, reading. Addison-Wesley, MA (1983)
Tao, G.: Adaptive Control Design and Analysis. Wiley, Hoboken (2003)
Lin, W., Qian, C.J.: Adding a power integrator: a tool for global stabilization of high-order lower-triangular systems. Syst. Control Lett. 39(5), 339–351 (2000)
Wu, Q.H., Jiang, L., Wen, J.Y.: Decentralized adaptive control of interconnected non-linear systems using high gain observer. Int. J. Control 77(8), 703–712 (2004)
Sun, B., Wu, C.X., Shi, J.P., Ruan, H.L., Ye, W.Q.: Direction-of-arrival estimation under array sensor failures with ULA. IEEE Access 8, 26445–26456 (2020)
Acknowledgements
This work was supported in part by National Natural Science Foundation of China (62303264, 62173208), National Science Foundation of Shandong Province of China (ZR2022QF021, ZR2023QF115) and Taishan Scholar Project of Shandong Province of China (tsqn202103–061).
Funding
This work was supported in part by National Natural Science Foundation of China (62303264).
Author information
Authors and Affiliations
Contributions
Shaohua Yang and Xiaoxi Cao wrote the main manuscript text. Xia Li gave a technique guidance of this manuscript. All authors reviewed the manuscript.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Yang, S., Cao, X., Sun, ZY. et al. Global adaptive stabilization for a class of uncertain multivariable systems with nonlinear parametrization. Nonlinear Dyn 112, 17291–17302 (2024). https://doi.org/10.1007/s11071-024-09954-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-024-09954-5