
Abstract
The present paper aims to explore bifurcation analysis, modulation instability, and optical soliton solutions in nonlinear media with third-order dispersion terms. A variable coefficient third-order nonlinear Schrödinger’s equation (PNLSE) with truncated \(M\)-fractional derivative is considered. We also discuss a few assets that the derivative satisfies. Initially, a novel evaluation method known as bifurcation analysis is employed to look at the complex model's dynamic behavior. Figure 1 provides an analytical and graphical study of the observed mechanism of static soliton through a saddle-node bifurcation in the nonlinear Schrödinger problem using a matching technique. Secondly, By implementing novel two analytic techniques such as unified solver and generalized unified techniques to offer insights into wave propagation and optical soliton conduct in nonlinear optics, optical communications, quantum mechanics, plasma physics, and engineering. The underlying idea of these two approaches is to transform the equation with partial derivatives into a version of the equation with ordinary derivatives, which are first required to incorporate a new wave definition. These techniques permit us to generate innovative soliton solutions that can be formulated in terms of rational, hyperbolic, and trigonometrical functions. The collected outcomes have the potential to facilitate an understanding and elucidation of the physical characteristics of waves moving within a dispersive substance. We additionally estimated conservative values related to solitons, such as energy, momentum, and power. By selecting appropriate parameter values, the graphical shapes in 3D, density, and 2D are generated using relevant parameter values to visually present the obtained results, including periodic wave soliton, interaction of kink and bell shape soliton, periodic breather wave soliton, double periodic soliton through unified solver method and interaction of kink and periodic lump wave soliton and also with the periodic soliton, double periodic wave soliton, periodic wave soliton with lump soliton, multi periodic wave with kink shape soliton, periodic wave soliton, periodic breather wave soliton, periodic wave soliton, multi periodic wave soliton, periodic lump wave soliton, breather wave soliton multi periodic wave through generalized unified technique, providing an insightful visualization of the discovered solutions. In a two-dimensional graph, we show the effect of truncated \(M\)-fractional parameters for [\(g=0.1, 0.5, 0.9\)]. Additionally, the modulation instability spectrum can be expressed utilizing a linear analysis technique, and the modulation instability bands are shown to be influenced by the third-order and group velocity dispersion. The findings indicate that the modulation instability disappears for negative values of the fourth order in a typical dispersion regime. Consequently, it was shown that the techniques mentioned previously could be an effective tool to generate unique, precise soliton solutions for numerous uses, which are crucial to nonlinear optics, optical communications, and engineering.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Nonlinear complex models stand at the forefront of scientific inquiry, providing powerful tools to unravel intricacies in various domains. Nonlinear complex models, characterized by intricate mathematical relationships and nonlinearity, represent a class of mathematical frameworks that capture the complexities inherent in real-world phenomena. Unlike their linear counterparts, these models can describe and simulate intricate behaviors, offering a more nuanced understanding of complex systems. Nonlinear complex models find profound applications in mathematical physics, especially in studying chaotic systems and quantum phenomena [1,2,3,4,5,6,7,8,9,10]. Chaos theory utilizes these models to analyze deterministic systems with chaotic behavior, while in quantum mechanics, nonlinear Schrödinger equations with complex variables model quantum phenomena like entanglement and tunneling. The optical soliton solution of nonlinear complex models holds significant importance in nonlinear optics and communication systems. Optical solitons are stable, localized wave packets that maintain their shape and amplitude while propagating through a nonlinear medium. Considering nonlinear complex models, often described by equations like the nonlinear Schrödinger equation (NLSE), plays a crucial role in defining the balance between dispersive and nonlinear effects, enabling the formation and maintenance of solitons over long distances. This stability is crucial for signal integrity in optical communication systems. The investigation of optical soliton solutions from nonlinear complex models is complicated. Recently there are some method are developed to integrate optical soliton solution of NLCE such as Modified extended tanh-function method [11], Extended MSE technique [12, 13], novel approach [14], transformed rational function [15], two versatile integration architectures [16], \({\varphi }^{6}\)-expansion method and modified generalized exponential rational function method [17], modified extended tanh expansion method[18], New extended direct algebraic method [19], modified Sardar sub-equation method (MSSEM) [20], refined invariant subspace method [21], NMSE technique [22], simplest equation method and NMK method [23], exponential expansion method [24], Sardar subequation method, new Kudryashov's method, and \((1/G,G^{\prime}/G)\) method [25] \(exp (-\phi (\xi ))\)-expansion and NMK schemes [26], improved collocation technique [27], a single- step implicit block method [28], extended tanh expansion method [29], generalized exponential rational function method (GERFM), \((G^{\prime}/G2)-\) expansion function method [30], \((G^{\prime}/G2)\)—expansion function method, the modified direct algebraic method (MDAM), and the generalized Kudryashov method [31, 32], and so on.
Fractional calculus, which deals with derivatives and integrals of non-integer order, holds significance across various fields including physics, engineering, economics, and biology. Its history dates back to the seventeenth century, with mathematicians like Leibniz, Euler, and Laplace pondering over non-integer order differentials. However, it wasn't until the twentieth century that the subject gained momentum, notably through the works of Liouville, Riemann, and Hadamard. Fractional derivatives offer a more nuanced understanding of systems with memory, long-range dependence, and complex dynamics, which classical calculus fails to capture. They find applications in modeling phenomena such as anomalous diffusion, viscoelasticity, and fractional-order control systems. Furthermore, fractional calculus enables a deeper insight into fractals and chaotic systems. Its burgeoning relevance in modern research underscores the necessity of understanding and leveraging its principles to tackle contemporary challenges across diverse scientific disciplines. Recently there are some fractional form are developed such as conformable fraction [33,34,35], Atangana-Baleanu fractional [36], Caputo fractional derivative [37], beta fractional form [37,38,39], truncated M fractional form [40,41,42], and so on.
The nonlinear Schrödinger equation (NLSE) carries over the basic ideas of quantum mechanics to include nonlinear phenomena, which are important in many areas of science and engineering, through condensed matter physics, plasma physics, and optics, A nonlinear partial differential equation describes complex wave functions in nonlinear mediums. Zhakarov and Shabat initially presented NLSE in the 1970 s. It displays intricate dynamics, such as wave collapse and soliton propagation. Bose–Einstein condensates, ultrafast laser dynamics, and optical fiber modeling are among the applications. NLSE's transdisciplinary significance stems from its capacity to elucidate nonlinear wave behavior, hence promoting progress in several scientific and technological domains. It is well known that two forms of the variable coefficient cubic nonlinear equation Schrödinger equation are the most traditionally used. For the anomalous dispersion regime, the variable coefficient cubic nonlinear equation Schrödinger equation [43,44,45,46,47,48] read as:
It is well known that the anomalous group velocity dispersion (GVD) gives bright solitons, whereas the normal GVD gives rise to dark solitons, where both models are of wide interest in many applications, particularly in optical communications. The complex function \(Q(x, t)\), with \(x\) as the longitudinal variable parameter and \(t\) acting as the co-moving instant of time. The first term is the evolution term, the second term represents the group velocity dispersion (GVD) term, and the third term accounts for the nonlinearity, which is cubic for the Eq. (1).
The main motivation of this research work is to explain the bifurcation analysis with phase portrait and also explain the stable and unstable conditions. Secondly, in this article, we also integrate NLSE with the help of a unified solver technique and unified techniques (UT). By applying these techniques, the obtained solutions are expressed as, trigonometric, hyperbolic, and rational functions, etc. by using this technique we get 29 analytic solutions. Additionally, the modulation instability spectrum can be expressed utilizing a linear analysis technique, and the modulation instability bands are shown to be influenced by the third-order and group velocity dispersion.
The piece of work has been arranged in the following order: In Sect. 2, we elaborate on the features and properties of the truncated M fractional derivative, unified solver technique, and generalized unified technique. In Sect. 3, Mathematical Analysis of the governing model. In Sect. 4, deals with the application of analytic techniques. In Sect. 5, In Sect. 6, the description of graphs is discussed, and also observed the effect of fractional parameters. In Sect. 7, we analyze the modulation instability of the governing model. Lastly in Sect. 8, summarize the conclusion.
2 Methodology
2.1 Truncated M-fractional derivative
Definition: consider \(\Xi :\left( {0,~\infty } \right) \to \mathbb{R}\) the TMD of \(\upchi \) with order \(\text{n}\) exhibit as:
Here \({\text{H}}_{\text{n}}\left(.\right)\) is a truncated Mittag–Leffler function of one parameter that defined as [40, 41]:
Characteristics
Suppose \(0<g<1, n>0, l,m\in \mathfrak{R}\) and \(\Xi ,\Theta , g-\) differentiable at a point \(\uptau >0,\), then
-
(1)
\({D}_{M,\tau }^{g, n}\left(l\Xi \left(\tau \right)+m\Theta \left(\tau \right)\right)=l{D}_{M,\tau }^{g, n}\Xi \left(\tau \right)+m{D}_{M,\tau }^{g, n}\Theta \left(\tau \right).\)
-
(2)
\({D}_{M,\tau }^{g, n}\left(\Xi \left(\tau \right)\Theta \left(\tau \right)\right)=\Xi \left(\tau \right){D}_{M,\tau }^{g, n}\Theta \left(\tau \right)+\Theta \left(\tau \right){D}_{M,\tau }^{g, n}\Xi \left(\tau \right).\)
-
(3)
\({D}_{M,\tau }^{g, n}\left(\frac{\Xi \left(\tau \right)}{\Theta \left(\tau \right)}\right)=\frac{\Xi \left(\tau \right){D}_{M,\tau }^{g, n}\Theta \left(\tau \right)+\Theta \left(\tau \right){D}_{M,\tau }^{g, n}\Xi \left(\tau \right)}{{\Theta \left(t\right)}^{2}}.\)
-
(4)
\({D}_{M,\tau }^{g, n}\left(\Xi \left(\tau \right)\right)=0\) where \(\Xi \left(\tau \right)=a.\)
-
(5)
\({D}_{M,\tau }^{g, n}\Xi \left(\tau \right)=\frac{{\tau }^{1-g}}{\Gamma \left(n+1\right)}\frac{d\Xi \left(\tau \right)}{d\tau }.\)
2.2 Unified solver method
In this subsection, we explored the unified solver technique [38, 39]. For the ordinary differential equations
Here \(\mathcal{B},\mathcal{H},\mathfrak{R}\) are real numbers. The closed-form solution of the model in Eq. (2) are given below:
-
(1)
For \(\mathfrak{R}=0\) and \(\frac{\mathcal{H}}{\mathcal{B}}<0\), we get a rational solution
$$u\left(\varsigma \right)=\pm \sqrt{\frac{-\mathcal{H}}{2\mathcal{B}}}\frac{1}{\varsigma },$$ -
(2)
For \(\frac{\mathfrak{R}}{\mathcal{B}}<0\) and \(\frac{\mathfrak{R}}{\mathcal{H}}>0\), we get trigonometric solution
$$u\left(\varsigma \right)=\pm \sqrt{\frac{\mathfrak{R}}{\mathcal{H}}}tan\left(\sqrt{\frac{-\mathfrak{R}}{2\mathcal{B}}}\varsigma \right),$$$$u\left(\varsigma \right)=\pm \sqrt{\frac{\mathfrak{R}}{\mathcal{H}}}cot\left(\sqrt{\frac{-\mathfrak{R}}{2\mathcal{B}}}\varsigma \right),$$ -
(3)
For \(\frac{\mathfrak{R}}{\mathcal{B}}>0\) and \(\frac{\mathfrak{R}}{\mathcal{H}}<0\), we get hyperbolic solution
$$u\left(\varsigma \right)=\pm \sqrt{\frac{-\mathfrak{R}}{\mathcal{H}}}tanh\left(\sqrt{\frac{\mathfrak{R}}{2\mathcal{B}}}\varsigma \right),$$$$u\left(\varsigma \right)=\pm \sqrt{-\frac{\mathfrak{R}}{\mathcal{H}}}coth\left(\sqrt{\frac{\mathfrak{R}}{2\mathcal{B}}}\varsigma \right),$$
Remark 01
The unified solver method directly executed analytic solutions of the nonlinear models. Using the unified solver method we can 5 analytic solutions that are trigonometric, hyperbolic, and rational. But this method works only for the nonlinear models Eq. (2).
2.3 Unified method
In this section, we elaborate on the procedure of a unified method to time M-fractional NLEEs. For this purpose, the fractional NLEEs are considered in the following form:
where \(\mathcal{W}(\text{x},\text{t})\) is an unaccustomed function.
Now we instigate \( \varsigma = \aleph x - \omega (n + 1)/gt^{g} . \) where \(\mathcal{W}(\text{x},\text{t})=\text{u}(\varsigma ),\) for getting an ODE form of the given nonlinear model. Then we integrate it if it’s possible.
Let's attempt to determine the solutions to problem (4) in the following manner:
where \(M\) is a free positive integer and \({\theta }_{i}\) and \({\vartheta }_{i}\) for \((0\le i\le N)\) are discovered afterward.
the solution in Eq. (5) satisfied the following auxiliary differential equation:
If we insert the Eq. (5) into the dynamic Eq. (4) with the help of Eq. (6), then the following polynomial of \(F\left(\varsigma \right)\).
where \({C}_{i}(-\text{n}\le i\le n)\) are constant coefficient of \({F\left(\varsigma \right)}^{\pm \text{n}}\). Now we set \({C}_{i}=0,i=0,\dots ,n\) and solved these equations to get the non-trivial solutions.
The solutions of Eq. (6) are:
For \(\chi >0,\)
For \(\chi <0,\)
For \(\chi =0,\)
Remark 02
The unified method is the modified version of the modified extended tanh method (METM). In the METM technique, only five solutions are generated, but using the unified method we can 9 analytic solutions, that are trigonometric, hyperbolic, and rational. We can solve any integral or non-integral models. But the rational solution most of the time is rejected.
3 Mathematical analysis of the governing model
In this section, we study the variable coefficient nonlinear Schrödinger equation [43] in the succeeding form:
here \(\lambda (t)\) is the function of time.
According to the method we consider a transformation:
here \(K,\theta \), and \(\beta \) are constants.
Substituting the transformation into (1), we obtain an ordinary differential equation:
4 Bifurcation analysis
According to the Galilean transformation, Eq. (7) is the following form:
where \({\lambda }_{1}=-\frac{\varepsilon \left(t\right)}{{K}^{2}}, {\lambda }_{2}=-\frac{\left(\lambda +{\theta }^{2}\right)}{{K}^{2}}.\)
here \(h\) is the Hamiltonian constant. We solve the system
Now we derive the equilibrium points of (9). The derived points are:
The Jacobian matrix determinant of the system (9) is
We know that:
-
(1)
\((F, \wp )\) is a saddle point if \(j\left(F, \wp \right)<0;\)
-
(2)
\((F, \wp )\) is a center point if \(j\left(F, \wp \right)>0;\)
-
(3)
\((F, \wp )\) is a cuspidor point if \(j\left(F, \wp \right)=0;\)
The outcomes that may be attained by altering the pertinent parameter are listed below:
Case 1: \({\lambda }_{1}>0\) and \({\lambda }_{2}>0.\)
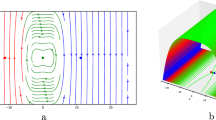
For particular values of the free parameters \(K=1, \lambda =-1.75, \theta =1, \varepsilon =-1\), there are three equilibrium points exist of the required system as \((\text{0,0}),(-\text{0.866025,0})\), and \((\text{0.866025,0})\). In Fig. 1a the point \(\left(\text{0,0}\right)\) performances as the saddle point and \((-\text{0.866025,0})\), and \((\text{0.866025,0})\) performances as the central point.

The phase portrait of the Eq. (8). a when \({\lambda }_{1}>0\) and \({\lambda }_{2}>0\); b \({\lambda }_{1}<0\) and \({\lambda }_{2}>0\); c \({\lambda }_{1}>0\) and \({\lambda }_{2}<0\); d \({\lambda }_{1}<0\) and \({\lambda }_{2}<0\)
Case 2: \({\lambda }_{1}<0\) and \({\lambda }_{2}>0.\)
For particular values of the free parameters \(K=1, \lambda =-1.5, \theta =1, \varepsilon =1\), we find that the only real point \(\left(\text{0,0}\right)\) is the saddle point present in Fig. 1b.
Case 3: \({\lambda }_{1}>0\) and \({\lambda }_{2}<0.\)
For particular values of the free parameters \(K=1, \lambda =\theta =0.5, \varepsilon =-1\), we find that the only real point \(\left(\text{0,0}\right)\) (central point) is present in Fig. 1c.
Case 4: \({\lambda }_{1}<0\) and \({\lambda }_{2}<0.\)
For particular values of the free parameters \(K=2, \lambda =0.206, \theta =1, \varepsilon =1\), three equilibrium points exist of the required system as \((\text{0,0}),(-\text{1.0382,0})\), and \((\text{1.0382,0})\). In Fig. 1a the point \(\left(\text{0,0}\right)\) performances as the saddle point and \((-\text{1.0382,0})\), and \((\text{1.0382,0})\). performances as the central point.
5 Analytical form of optical wave pattern
In the existing section, there are several optical soliton solutions are integrated into the variable coefficient NLSE model by using the unified solver technique and generalized unified technique.
5.1 Unified solver method
In this subsection, we explored the unified solver technique [39, 50]. For the ordinary differential equations
Here \(\mathcal{B}=-{K}^{2},\mathcal{H}=\lambda \left(t\right),\mathfrak{R}=-\left(\beta +{\theta }^{2}\right)\) are real number. The closed form solution of the model in Eq. (7) are given below:
For \(\mathfrak{R}=0\) and \(\frac{\lambda \left(t\right)}{-{K}^{2}}<0\), we get rational solution:
For \(\frac{-\left(\beta +{\theta }^{2}\right)}{-{K}^{2}}<0\) and \(\frac{-\left(\beta +{\theta }^{2}\right)}{\lambda \left(t\right)}>0\), we get trigonometric solution:
For \(\frac{-\left(\beta +{\theta }^{2}\right)}{-{K}^{2}}>0\) and \(\frac{-\left(\beta +{\theta }^{2}\right)}{\lambda \left(t\right)}<0\), we get hyperbolic solution:
where \(\varsigma =iK\left(x-2\theta \frac{\Gamma \left(\text{n}+1\right)}{g}{t}^{g}\right).\)
5.2 Unified technique
According to the generalized unified technique [51,52,53], the trial solution of Eq. (7) is
Make the use of Eq. (16) into Eq. (7) with the help of Eq. (5). Then we get the following system of equations:
Case 01: \(K=\sqrt{\frac{\varepsilon }{2}}{\mu }_{1},\lambda =\lambda ,\theta =\sqrt{-\left(\chi \varepsilon {\mu }_{1}^{2}+\lambda \right)},{\mu }_{0}=0,{\mu }_{1}={\mu }_{1},{\mu }_{2}=0.\)
The trigonometric solution is executed for \(\chi >0.\)
The Hyperbolic solution are executed for \(\chi <0\).
where \( \varsigma = i\sqrt {\frac{\varepsilon }{2}} \mu _{1} \left( {x - 2\sqrt { - \left( {\chi \varepsilon \mu _{1}^{2} + \lambda } \right)} \frac{{\Gamma \left( {n + 1} \right)}}{g}t^{g} } \right). \)
Case 02: \( \theta = \sqrt { - \left( {\chi \varepsilon \mu _{1}^{2} + \lambda } \right)} ,\mu _{0} = 0,\mu _{1} = 0,\mu _{2} = \chi K\sqrt {\frac{2}{\varepsilon }.} \)
The trigonometric solution is executed for \(\chi >0\).
The Hyperbolic solution are executed for \(\chi <0\).
where \( \varsigma = iK\left( {x - 2\sqrt { - \left( {\chi \varepsilon \mu _{1}^{2} + \lambda } \right)} \frac{{\Gamma \left( {n + 1} \right)}}{g}t^{g} } \right). \)
Case 03: \( \lambda = 4K^{2} \chi - \theta ^{2} ,\mu _{0} = 0,\mu _{1} = K\sqrt {\frac{2}{\varepsilon }} ,\mu _{2} = \chi K\sqrt {\frac{2}{\varepsilon }} . \)
The trigonometric solution is executed for \(\chi >0\).
The Hyperbolic solution is executed for \(\chi <0\).
where \( \varsigma = iK\left( {x - 2\theta \frac{{\Gamma \left( {n + 1} \right)}}{g}t^{g} } \right). \)
6 Numerical discussion
The nonlinear Schrödinger equation (NLSE) carries over the basic ideas of quantum mechanics to include nonlinear phenomena, which are important in many areas of science and engineering, through condensed matter physics, plasma physics, and optics, A nonlinear partial differential equation describes complex wave functions in nonlinear mediums. Zhakarov and Shabat initially presented NLSE in the 1970s. It displays intricate dynamics, such as wave collapse and soliton propagation. Bose–Einstein condensates, ultrafast laser dynamics, and optical fiber modeling are among the applications. NLSE's transdisciplinary significance stems from its capacity to elucidate nonlinear wave behavior, hence promoting progress in several scientific and technological domains. In this division, we discuss the numerical form of the obtained solutions of NLSE with the Kerr law nonlinearity model with a wide range of significance in the applied science. The NLS equation advocates the nonlinear optical wave propagations in nonlinear optical fibers which exhibits a Kerr law nonlinearity. The optical wave pattern has a vital significance to explore the soliton propagation through fiber communications. The attained solutions for the studied equation were achieved in explicit form. These solutions establish enjoyable wave profiles and characterize fabulous phenomena in optical fiber communications. The profiles that were acquired could help clarify the capillary profiles, femtosecond impulses, laser unpredictable pulses, telecommunication demonstrations, and space observations.
6.1 Unified solver technique
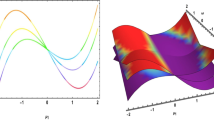
To understand the dynamics inherent in the results, it is necessary to grasp the physical elucidation of the obtained solutions. In this portion, we determine the visual illustrations of the solutions we have evolved, operating the three-dimensional with density plots and two-dimensional plots to reveal our obvious solutions. Since the cNLS equation is equivalent to the Schrödinger equation, we focus on three essential components: the real, imaginary, and absolute values of the derived solutions. By using the unified solver technique, we plot some profiles of periodic wave soliton, the interaction of kink and bell shape soliton, periodic breather wave soliton, double periodic soliton, etc. These profiles find extensive applications in fields like as nonlinear optics, plasma physics, and fuzzy dynamics. For example, periodic singular soliton structures can be used in nonlinear optics to regulate and modulate light propagation. Similar to this, these structures may help understand and control periodic disturbances in furious flocks in the field of furious dynamics.
Figure 2 displays the 3D with density and 2D view of the solution Eq. (12) which is the periodic wave soliton for the parametric values \(\theta =1, \lambda =-2, K=0.5, \varepsilon =-t, n=1.5\). The effect of truncated M fractional parameters is provided by 3D and 2D plots with density plots. For the parametric values \(\theta =1, \lambda =-2, K=0.5, \varepsilon =-t, n=1.5\), the solution of Eq. (12) represents the interaction of kink and bell shape soliton solutions in Fig. 3. Figure 4, displays the 3D with density and 2D view of the solution Eq. (12) which is the periodic breather wave soliton for the parametric values \(\theta =1, \lambda =2, K=-0.5i, \varepsilon =-tanh\left(t\right), n=1.5\). The effect of truncated M fractional parameters is provided by 3D and 2D plots with density. For the parametric values \(\theta =1, \lambda =-3, K=2, \varepsilon =sec\left(t\right), n=1.5\), the solution of Eq. (12) represents the double periodic soliton solutions in Fig. 5. Figure 6 displays the 3D with density and 2D view of the solution Eq. (14) which is the periodic wave soliton for the parametric values \(\theta =1, \lambda =-0.5, K=0.5, \varepsilon =sec\left(t\right)+tan\left(t\right), n=1.5\).

3D and 2D plots are graphically numerical simulations related to the complex term of Eq. (12) for the parametric values \(\theta =1, \lambda =-2, K=0.5, \varepsilon =-t, n=1.5\)

3D and 2D plots are graphically numerical simulations related to the complex term of Eq. (12) for the parametric values \(\theta =1, \lambda =-2, K=0.5, \varepsilon =-t, n=1.5\)

3D and 2D plots are graphically numerical simulations related to the complex term of Eq. (12) for the parametric values \(\theta =1, \lambda =2, K=-0.5i, \varepsilon =-tanh\left(t\right), n=1.5\)

3D and 2D plots are graphically numerical simulations related to the complex term of Eq. (12) for the parametric values \(\theta =1, \lambda =-3, K=2, \varepsilon =sec\left(t\right), n=1.5\)

3D and 2D plots are graphically numerical simulations related to the complex term of Eq. (14) for the parametric values \(\theta =1, \lambda =-0.5, K=0.5, \varepsilon =sec\left(t\right)+tan\left(t\right), n=1.5\)
6.2 Unified technique
In this portion, we determine the visual illustrations of the obtained solutions of the cNLSE by using a generalized unified technique. For the appropriate values of the parameters, we plot some profile of interaction of kink and periodic lump wave soliton and also with the periodic soliton, double periodic wave soliton, periodic wave soliton with lump soliton, multi periodic wave with kink shape soliton, periodic wave soliton, periodic breather wave soliton, periodic wave soliton, multi periodic wave soliton, periodic lump wave soliton, breather wave soliton multi periodic wave, etc. These profiles find extensive applications in fields like as nonlinear optics, plasma physics, and fuzzy dynamics. For example, periodic singular soliton structures can be used in nonlinear optics to regulate and modulate light propagation. Similar to this, these structures may help understand and control periodic disturbances in furious flocks in the field of furious dynamics.
Figure 7 shows 3D and 2D with a density view of the solutions in Eq. (17) which is the interaction of kink and periodic lump wave soliton and also with the periodic soliton solution for the parametric values \(\Lambda =2, K=0.1, h=-1, \wp =-2, \varepsilon =tanh\left(t\right),\chi =2,\lambda =-0.5,{\mu }_{1}=1, n=1.5.\)

3D and 2D plots are graphically numerical simulations related to the complex term of Eq. (17) for the parametric values \(\Lambda =2, K=0.1, h=-1, \wp =-2, \varepsilon =tanh\left(t\right),\chi =2,\lambda =-0.5,{\mu }_{1}=1, n=1.5\)
Figure 8 demonstrates the 3D with density and 2D view of the solutions of Eq. (18) which is a double periodic wave soliton profile for the parametric values \(\Lambda =-0.5, K=-1, h=0.01, \wp =-6, \varepsilon =cos\left(t\right)+tanh\left(t\right),\chi =0.1,\lambda =-0.1,{\mu }_{1}=1, n=1.5.\)

3D and 2D plots are graphically numerical simulations related to the complex term of Eq. (18) for the parametric values \(\Lambda =-0.5, K=-1, h=0.01, \wp =-6, \varepsilon =cos\left(t\right)+tanh\left(t\right),\chi =0.1,\lambda =-0.1,{\mu }_{1}=1, n=1.5\)
Figure 9 displays the 3D with density and 2D plots of the solution in Eq. (18) which is the periodic wave soliton with lump soliton solutions for the parametric values \(\Lambda =1, h=0.1, \wp =2, \varepsilon ={t}^{2},\chi =2,\lambda =5,{\mu }_{1}=1, n=1.5.\)

3D and 2D plots are graphically numerical simulations related to the complex term of Eq. (18) for the parametric values \(\Lambda =1, h=0.1, \wp =2, \varepsilon ={t}^{2},\chi =2,\lambda =5,{\mu }_{1}=1, n=1.5\)
Figure 10 displays the 3D with density and 2D plots of the solution of Eq. (21) which is the multi-periodic wave with kink shape soliton solution for the parametric values \(\Lambda =0.4, h=-0.1, \wp =-1, \varepsilon =tanh\left(t\right),\chi =-2,\lambda =-0.5,{\mu }_{1}=1, n=1.5.\)

3D and 2D plots are graphically numerical simulations related to the complex term of Eq. (21). For the parametric values \(\Lambda =0.4, h=-0.1, \wp =-1, \varepsilon =tanh\left(t\right),\chi =-2,\lambda =-0.5,{\mu }_{1}=1, n=1.5\)
Figure 11 represents 3D with density and 2D plots of the solution of Eq. (21) which is the periodic wave soliton for the parametric values \(\Lambda =2, h=-0.1, \wp =1, \varepsilon =sin\left(t\right),\chi =-2,\lambda =-0.5,{\mu }_{1}=1, n=1.5.\)

3D and 2D plots are graphically numerical simulations related to the complex term of Eq. (21) for the parametric values \(\Lambda =2, h=-0.1, \wp =1, \varepsilon =sin\left(t\right),\chi =-2,\lambda =-0.5,{\mu }_{1}=1, n=1.5\)
Figure 12 shows the 3D with density and 2D plots of the solution of Eq. (25) which is a periodic breather wave soliton for the parametric values \(\Lambda =2, h=-1, \wp =1, \varepsilon =tanh\left(t\right),\chi =2,\lambda =-0.5,{\mu }_{1}=1, n=1.5.\)

3D and 2D plots are graphically numerical simulations related to the complex term of Eq. (25) for the parametric values \(\Lambda =2, h=-1, \wp =1, \varepsilon =tanh\left(t\right),\chi =2,\lambda =-0.5,{\mu }_{1}=1, n=1.5\)
Figure 13 displays the 3D with density and 2D plots of the solution of Eq. (25) which is periodic wave soliton for the parametric values \(\Lambda =0.5, K=1, h=-1, \wp =1, \varepsilon =t,\chi =2,\lambda =5, n=1.5.\)

3D and 2D plots are graphically numerical simulations related to the complex term of Eq. (25) for the parametric values \(\Lambda =0.5, K=1, h=-1, \wp =1, \varepsilon =t,\chi =2,\lambda =5, n=1.5\)
Figure 14 displays the 3D with density and 2D views of the solution of Eq. (30) which is the multi-periodic wave soliton for the parametric values \(\Lambda =0.5, K=-1, h=-1, \wp =0.1, \varepsilon =\text{sech}(t),\chi =-1,\lambda =0.5, n=1.5.\)

3D and 2D plots are graphically numerical simulations related to the complex term of Eq. (30) for the parametric values \(\Lambda =0.5, K=-1, h=-1, \wp =0.1, \varepsilon =\text{sech}(t),\chi =-1,\lambda =0.5, n=1.5\)
Figure 15 displays the 3D with density and 2D plots of the solution of Eq. (30) which is the multi-periodic wave soliton for the parametric values \(\Lambda =-0.5, K=1, h=-1, \wp =4, \varepsilon =\text{sin}(t),\chi =-2,\lambda =1, n=1.5.\)

3D and 2D plots are graphically numerical simulations related to the complex term of Eq. (30) for the parametric values \(\Lambda =-0.5, K=1, h=-1, \wp =4, \varepsilon =\text{sin}(t),\chi =-2,\lambda =1, n=1.5\)
Figure 16 represents the 3D with density and 2D plots of the solution of Eq. (38) which is periodic lump wave soliton for the parametric values \(\Lambda =-2, K=0.5, h=0.01, \wp =1, \varepsilon =\text{sec}(t),\chi =-1,\theta =-0.5, n=1.5\)

3D and 2D plots are graphically numerical simulations related to the complex term of Eq. (38) for the parametric values \(\Lambda =-2, K=0.5, h=0.01, \wp =1, \varepsilon =\text{sec}(t),\chi =-1,\theta =-0.5, n=1.5\)
Figure 17 represents 3D with density and 2D plots of the solution of Eq. (38) which is breather wave soliton for the parametric values \(\Lambda =0.5, K=-0.5, h=0.01, \wp =1, \varepsilon =\text{tanh}(t)+\text{cos}(t),\chi =-1,\theta =0.5, n=1.5.\)

3D and 2D plots are graphically numerical simulations related to the complex term of Eq. (38) for the parametric values \(\Lambda =0.5, K=-0.5, h=0.01, \wp =1, \varepsilon =\text{tanh}(t)+\text{cos}(t),\chi =-1,\theta =0.5, n=1.5\)
7 Modulation instability
Several higher-order non-linear complex PDEs show an instability that leads to an analysis of how the interaction between the dispersive and non-linear effects modulates the steady state. Using the conventional linear instability examination, one may determine the modulation instability of NLSE in Eq. (1). The NLSE study state solution is in the subsequent format [54]:
where \(P\) is normalized power. The perturbation \(\Psi (x,t)\) is explored by utilizing linear stability examination. Setting Eq. (41) into Eq. (1) and linearizing, we get
where the character \({\Psi }^{*}\) designates complex conjugate. Consider the solution of Eq. (42) in the form
where \(k\) and \(\omega \) are the standardized wave number and frequency of perturbation. The relationship between time oscillations and spatial oscillations \({e}^{i\omega t}\) of wave number \(k\) is determined by the dispersion relation \(k=k(\omega )\) of a constant coefficient linear PDE. By substituting Eq. (43) into Eq. (42), the dispersion relation that follows is derived as
The dispersion relation's Eq. (44) demonstrates that the self-phase modulation stimulated Raman scattering, wave number, and group velocity dispersion all influence the steady-state stability. If
However, the stable solution turns into an unstable one.
The \(\omega \) is the imaginary part since the perturbation grows exponentially. One can easily see that, for the occurrence of modulation stability when \({\gamma }^{2}{k}^{2}\ne 1\). if (Fig. 18).

Gain spectrum of MI for different values of \(k=\left[\text{3,5},7\right],\epsilon =\left[\text{0.7,0.8,0.9}\right],p=\left[-0.01,-0.03,-0.05\right],\delta =\left[\text{1,2},3\right]\)
8 Comparison
The nonlinear Schrödinger equation (NLSE) carries over the basic ideas of quantum mechanics to include nonlinear phenomena, which are important in many areas of science and engineering, through condensed matter physics, plasma physics, and optics, A nonlinear partial differential equation describes complex wave functions in nonlinear mediums. It displays intricate dynamics, such as wave collapse and soliton propagation. Bose–Einstein condensates, ultrafast laser dynamics, and optical fiber modeling are among the applications. NLSE's transdisciplinary significance stems from its capacity to elucidate nonlinear wave behavior, hence promoting progress in several scientific and technological domains. Different researchers integrated NLSE by using different techniques [43,44,45,46,47,48] such as Taghizadeh used the simplest equation technique [43] to study NLSE with Kerr law nonlinearity, W.X. Ma applied direct algebraic technique [44] to find exact solutions to NLSE, N.H. Sweilam, Variational iteration scheme [45] for solving cNLSE, Taghizadeh found exact solutions of the NLSE by the first integral method [46] and also [47, 48]. In this division, we compare our study with existing work in [43] and also describe the novelty of our outcomes.
9 Compare with simplest equation method [36]
Simplest equation method, Taghizadeh [43] | Our study |
If we set \(\mu =2, \alpha =2, K=1, a=1,{a}_{1}=-1\), \({\xi }_{0}=0\), then the solution Eq. (24) is: \(u\left(x,t\right)=\sqrt{\frac{3}{2}} coth\left(i\left(x-4t\right)\right){e}^{i\left(2x-\frac{7}{2}t\right)}\) | If we set \(\theta =2, K=1,\beta =-\frac{7}{2} \varepsilon \left(t\right)=-1\), then the solution Eq. (15) is: \(Q\left(x,t\right)=\sqrt{\frac{3}{2}} coth\left(i\left(x-4t\right)\right){e}^{i\left(2x-\frac{7}{2}t\right)}\) |
If we set \(\mu =2, \alpha =1, K=1,\beta =1\), then the solution Eq. (27) is: \(u\left(x,t\right)=tanh\left(i\left(x-2t\right)\right){e}^{i\left(x+t\right)}\) | If we set \(\theta =1, K=1,\beta =1,\varepsilon \left(t\right)=1\), then the solution Eq. (14) is: \(Q\left(x,t\right)=tanh\left(i\left(x-2t\right)\right){e}^{i\left(x+t\right)}\) |
9.1 Our novelty
Taghizadeh used the simplest equation (SE) technique [43] to study NLSE with Kerr law nonlinearity. Using the SE technique, they got two soliton solutions such as one exponential and one hyperbolic solution. In this work, we got 24 solutions by unified technique and 5 solutions using the unified solver technique. For numerical observation, we discuss some solutions graphically such as periodic wave soliton, the interaction of kink and bell shape soliton, periodic breather wave soliton, double periodic soliton through unified solver method, and interaction of kink and periodic lump wave soliton and also with the periodic soliton, double periodic wave soliton, periodic wave soliton with lump soliton, multi periodic wave with kink shape soliton, periodic wave soliton, periodic breather wave soliton, periodic wave soliton, multi periodic wave soliton, periodic lump wave soliton, breather wave soliton multi periodic wave through generalized unified technique, providing an insightful visualization of the discovered solutions. We also analyzed the bifurcation analytical and graphical study of the observed mechanism of static soliton through a saddle-node bifurcation in the nonlinear Schrödinger problem using a matching technique. Additionally, the modulation instability spectrum can be expressed utilizing a linear analysis technique, and the modulation instability bands are shown to be influenced by the third-order and group velocity dispersion. For the first time, we investigate a lot of phenomena from the cNLSE.
10 Conclusion
In this work, we have successfully executed the bifurcation analysis, modulation instability, and optical soliton solutions of variable coefficient third-order nonlinear Schrödinger's equation (PNLSE) with truncated time \(M\)-fractional derivative. We also discuss a few assets that the derivative satisfies. Using the bifurcation analysis, we observed the mechanism of static soliton through a saddle-node bifurcation in the nonlinear Schrödinger problem. In Fig. 1, we explain the phase portrait to check it graphically. By implementing novel two analytic techniques such as unified solver and generalized unified techniques to offer insights into wave propagation and closed form optical soliton of NLS equation. By picking suitable parameter values, the graphical profiles in 3D, density, and 2D are engendered to visually contemporary the attained solutions, including periodic wave soliton, interaction of kink and bell shape soliton, periodic breather wave soliton, double periodic soliton through unified solver method and interaction of kink and periodic lump wave soliton and also with the periodic soliton, double periodic wave soliton, periodic wave soliton with lump soliton, multi periodic wave with kink shape soliton, periodic wave soliton, periodic breather wave soliton, periodic wave soliton, multi periodic wave soliton, periodic lump wave soliton, breather wave soliton multi periodic wave through generalized unified technique, providing an insightful visualization of the discovered solutions. The collected outcomes have the potential to facilitate an understanding and elucidation of the physical characteristics of waves moving within a dispersive substance. In a two-dimensional graph, we show the effect of truncated \(M\)-fractional parameters for [\(g=0.1, 0.5, 0.9\)]. Additionally, the modulation instability spectrum can be expressed utilizing a linear analysis technique, and the modulation instability bands are shown to be influenced by the third-order and group velocity dispersion. The findings indicate that the modulation instability disappears for negative values of the fourth order in a typical dispersion regime. The performance of the obtained solutions demonstrates the efficiency, conciseness, and effectiveness of the applied techniques, leading to fewer computations and wide applicability. The results of the examined wave are reliable for the researchers and have significant implications for mathematics and optical physics. In the future, we will study the chaotic behavior and sensitivity analysis of variable coefficient nonlinear variable coefficient third order nonlinear Schrödinger’s equation (PNLSE) with truncated space–time \(M\)-fractional derivative.
Data availability
All relevant data are within the manuscript.
References
Osman, M.S., Machado, J.A.T., Baleanu, D., Zafar, A., Raheel, M.: On distinctive solitons type solutions for some important nonlinear Schrödinger equations. Opt. Quantum Electron. 53(2), 70 (2021)
Wazwaz, A.M.: A variety of multiple-soliton solutions for the integrable (4+ 1)-dimensional Fokas equation. Waves Random Complex Media. 31(1), 46–56 (2020)
Lü, X., Ma, W.X., Yu, J., Lin, F., Khalique, C.M.: Envelope bright-and dark-soliton solutions for the Gerdjikov-Ivanov model. Nonlinear Dyn. 82, 1211–1220 (2015)
Ali, A., Ahmad, J., Javed, S., Hussain, R., Alaoui, M.K.: Numerical simulation and investigation of soliton solutions and chaotic behavior to a stochastic nonlinear Schrödinger model with a random potential. PLoS ONE 19(1), e0296678 (2024)
Arnous, A.H., Nofal, T.A., Biswas, A., Yıldırım, Y., Asiri, A.: Cubic-quartic optical solitons of the complex Ginzburg-Landau equation: a novel approach. Nonlinear Dyn. 111, 1–16 (2023)
Asghari, Y., Eslami, M., Matinfar, M., Rezazadeh, H.: Novel soliton solution of discrete nonlinear Schrödinger system in nonlinear optical fiber. Alex. Eng. J. 90, 7–16 (2024)
Ghanbari, B., Inc, M.: A new generalized exponential rational function method to find exact special solutions for the resonance nonlinear Schrödinger equation. Eur. Phys. J. Plus. 133(4), 142 (2018)
Kalita, J., Das, R., Hosseini, K., Baleanu, D., Salahshour, S.: Solitons in magnetized plasma with electron inertia under weakly relativistic effect. Nonlinear Dyn. 111(4), 3701–3711 (2023)
Akram, G., Sadaf, M., Khan, M.A.U.: Soliton solutions of the resonant nonlinear Schrödinger equation using modified auxiliary equation method with three different nonlinearities. Math. Comput. Simul 206(4), 1–20 (2023)
Asghari, Y., Eslami, M., Rezazadeh, H.: Soliton solutions for the time-fractional nonlinear differential-difference equation with conformable derivatives in the ferroelectric materials. Opt. Quantum Electron. 55, 289 (2023)
Zahran, E.H., Khater, M.M.: Modified extended tanh-function method and its applications to the Bogoyavlenskii equation. Appl. Math. Model. 40(3), 1769–1775 (2016)
Roshid, M.M., Rahman, M.M., Roshid, H.O.: Effect of the nonlinear dispersive coefficient on time-dependent variable coefficient soliton solutions of Kolmogorov–Petrovsky–Piskunov arising in biological and chemical science. Heliyon. (2024). https://doi.org/10.1016/j.heliyon.2024.e31294
Hossain, S., Roshid, M.M., Uddin, M., Ripa, A.A., Roshid, H.O.: Abundant time-wavering solutions of a modified regularized long wave model using the EMSE technique. Partial Differ. Equ. Appl. Math. 8, 100551 (2023)
Osman, M.S., Ghanbari, B.: New optical solitary wave solutions of Fokas-Lenells equation in presence of perturbation terms by a novel approach. Optik 175, 328–333 (2018)
Ma, W.X., Lee, J.H.: A transformed rational function method and exact solutions to the 3+ 1 dimensional Jimbo-Miwa equation. Chaos Solit. Fractals. 42(3), 1356–1363 (2009)
Raza, N., Osman, M.S., Abdel-Aty, A.H., Abdel-Khalek, S., Besbes, H.R.: Optical solitons of space-time fractional Fokas-Lenells equation with two versatile integration architectures. Adv. Differ. Equ. 2020, 1–15 (2020)
Younas, U., Yao, F., Nasreen, N., Khan, A., Abdeljawad, T.: Dynamics of M-truncated optical solitons and other solutions to the fractional Kudryashov’s equation. Results Phys. 58, 107503 (2024)
Younas, U., Yao, F., Ismael, H.F., Sulaiman, T.A., Murad, M.A.: Sensitivity analysis and propagation of optical solitons in dual-core fiber optics. Opt. Quantum Electron. 56(4), 548 (2024). https://doi.org/10.1007/s11082-023-06220-7
Younas, U., Yao, F., Nasreen, N., Khan, A., Abdeljawad, T.: On the dynamics of soliton solutions for the nonlinear fractional dynamical system: application in ultrasound imaging. Results Phys. 57, 107349 (2024)
Younas, U., Ismael, H.F., Sulaiman, T.A.: Dynamics of M-truncated optical solitons in fiber optics governed by fractional dynamical system. Opt. Quant. Electron. 56, 25 (2024)
Ma, W.X.: A refined invariant subspace method and applications to evolution equations. Sci China Math 55, 1769–1778 (2012)
Roshid, M.M., Abdeljabbar, A., Aldurayhim, A., Rahman, M.M.: Dynamical interaction of solitary, periodic, rogue type wave solutions and multi-soliton solutions of the nonlinear models. Heliyon. 8(12), e11996 (2022)
Roshid, M.M., Rahman, M.M., Bashar, M.H., Hossain, M.M., Mannaf, M.A.: Dynamical simulation of wave solutions for the M-fractional Lonngren-wave equation using two distinct methods. Alex. Eng. J. 81, 460–468 (2023)
Wazwaz, A.M., Kaur, L.: New integrable Boussinesq equations of distinct dimensions with diverse variety of soliton solutions. Nonlinear Dyn. 97, 83–94 (2019)
Rehman, H.U., Said, G.S., Amer, A., Ashraf, H., Tharwat, M.M., Abdel-Aty, M., Elazab, N.S., Osman, M.S.: Unraveling the (4+ 1)-dimensional Davey–Stewartson–Kadomtsev–Petviashvili equation: exploring soliton solutions via multiple techniques. Alex. Eng. J. 90, 17–23 (2024)
Roshid, M.M., Hossain, M.M., Hasan, M.S., Munshi, M.J.H., Sajib, A.H.: Dynamical structure of truncated M− fractional Klein-Gordon model via two integral schemes. Results Phys. 46, 106272 (2023)
Priyanka, S., Arora, F., Mebrek-Oudina, S.: Sahani, Super convergence analysis of fully discrete Hermite splines to simulate wave behaviour of Kuramoto-Sivashinsky equation. Wave Motion 121, 103187 (2023)
Farhan, M., Omar, Z., Mebarek-Oudina, F., Raza, J., Shah, Z., Choudhari, R.V., Makinde, O.D.: Implementation of the one-step one-hybrid block method on the nonlinear equation of a circular sector oscillator. Comput. Math. Model. 31(1), 116–132 (2020). https://doi.org/10.1007/s10598-020-09480-0
Osman, M.S., Ali, K.K., Gómez-Aguilar, J.F.: A variety of new optical soliton solutions related to the nonlinear Schrödinger equation with time-dependent coefficients. Optik 222, 165389 (2020)
Bilal, M., Rehaman, S.-U., Ahmad, J.: Dispersive solitary wave solutions for the dynamical soliton model by three versatile analytical mathematical methods. Eur. Phys. J. Plus 137, 674 (2022)
Bilal, M., Younas, U., Ren, J.: Dynamics of exact soliton solutions to the coupled nonlinear system using reliable analytical mathematical approaches. Commun. Theor. Phys. 73, 085005 (2021)
Bilal, M., Ahmad, J.: A variety of exact optical soliton solutions to the generalized (2+1)-dimensional dynamical conformable fractional Schrödinger model. Results Phys. 33, 105198 (2022)
Manikandan, K., Serikbayev, N., Aravinthan, D., Hosseini, K.: Solitary wave solutions of the conformable space–time fractional coupled diffusion equation. Partial Differ. Equ. Appl. Math. 9, 100630 (2024)
Wang, B.H., Wang, Y.Y., Dai, C.Q., Chen, Y.X.: Dynamical characteristic of analytical fractional solitons for the space–time fractional fokas-lenells equation. Alex. Eng. J. 59, 4699–4707 (2020)
Ameen, I.G., Elboree, M.K., Taie, R.O.A.: Traveling wave solutions to the nonlinear space–time fractional extended KdV equation via efficient analytical approaches. Alex. Eng. J. 82, 468–483 (2023)
Umer, A., Abbas, M., Shafiq, M., Abdullah, F.A., Sen, M.D.I., Abdeljawad, T.: Numerical solutions of Atangana-Baleanu time-fractional advection diffusion equation via an extended cubic B-spline technique. Alex. Eng. J. 74, 285–300 (2023)
Atangana, A., Alqahtani, R.T.: Modelling the spread of river blindness disease via the Caputo fractional derivative and the beta-derivative. Entropy 18(2), 40 (2016)
Zainab, I., Akram, G.: Effect of β-derivative on time fractional Jaulent-Miodek system under modified auxiliary equation method and exp (-g(Ω))- expansion method. Chaos Solit. Fractals. 168, 113147 (2023)
Akram, G., Sadaf, M., Zainab, I.: Observations of fractional effects of β-derivative and M-truncated derivative for space time fractional Phi-4 equation via two analytical techniques. Chaos Solit. Fractals. 154, 111645 (2022)
Yao, S.W., Manzoor, R., Zafar, A., Inc, M., Abbagari, S., Houwe, A.: Exact soliton solutions to the Cahn-Allen equation and Predator-Prey model with truncated M-fractional derivative. Results Phys. 37, 105455 (2022)
Sadaf, M., Akram, G., Arshed, S., Farooq, K.: A study of fractional complex Ginzburg-Landau model with three kinds of fractional operators. Chaos Solit. Fractal. 166, 112976 (2023)
Zafar, A., Ashraf, M., Saboor, A., Bekir, A.: M-Fractional soliton solutions of fifth order generalized nonlinear fractional differential equation via (G′/G2)-expansion method. Phys. Scr. 99, 025242 (2024)
Taghizadeh, N., Mirzazadeh, M.: The simplest equation method to study perturbed nonlinear Schrödinger’s equation with Kerr law nonlinearity. Commun. Nonlinear Sci. Numer. Simulat. 17, 1493–1499 (2012)
Ma, W.X., Chen, M.: Direct search for exact solutions to the nonlinear Schrödinger equation. Appl. Math. Comput. 215, 2835–2842 (2009)
Sweilam, N.H.: Variational iteration method for solving cubic nonlinear Schrödinger equation. J. Comput. Appl. Math. 207(1), 155–163 (2007)
Taghizadeh, N., Mirzazadeh, M., Farahrooz, F.: Exact solutions of the nonlinear Schrödinger equation by the first integral method. J. Math. Anal. Appl. 374(2), 549–553 (2011)
Zhou, Y., Wang, M., Miao, T.: The periodic wave solutions and solitary for a class of nonlinear partial differential equations. Phys. Lett. A 323, 77–88 (2004)
Forestieri, E., Secondini, M.: Solving the nonlinear schrödinger equation. Opt. Commun. Theory Techn. 2005, 3–11 (2005)
Boulaaras, S.M., Rehman, H.U., Iqbal, I., Sallah, M., Qayyum, A.: Unveiling optical solitons: solving two forms of nonlinear Schrödinger equations with unified solver method. Optik 295, 171535 (2023)
Alkhidhr, H.A., Abdelrahman, M.A.: Wave structures to the three coupled nonlinear Maccari’s systems in plasma physics. Results Phys. 33, 105092 (2022)
Turgut, A.K., Tugba, S.A., Saha, A., Kara, A.H.: Propagation of nonlinear shock waves for the generalized Oskolkov equation and its dynamic motions in the presence of an external periodic perturbation. Pramana J. Phys. 90, 78 (2018)
Roshid, M.M., Uddin, M., Mostafa, G.: Dynamic optical soliton solutions for M-fractional Paraxial Wave equation using unified technique. Result Phys. 51, 106632 (2023)
Roshid, M.M., Rahman, M.M., Roshid, H.-O., Bashar, M.H.: A variety of soliton solutions of time M-fractional non-linear models via a unified technique. PLoS ONE 19(4), e0300321 (2024)
Bilal, M., Hu, W., Ren, J.: Different wave structures to the Chen–Lee–Liu equation of monomode fibers and its modulation instability analysis. Eur. Phys. J. Plus 136, 385 (2021)
Acknowledgements
The authors like to express their gratitude to the Research Grant (Grant No. 1111202309017). Bangladesh University of Engineering and Technology (BUET)
Funding
The authors have not disclosed any funding.
Author information
Authors and Affiliations
Contributions
Md. Mamunur Roshid: Resources, Acquisition, Writing—review & editing, Validation, Methodology; M. M. Rahman: Visualization, Investigation, Supervision, Formal analysis, Validation.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Roshid, M.M., Rahman, M.M. Bifurcation analysis, modulation instability and optical soliton solutions and their wave propagation insights to the variable coefficient nonlinear Schrödinger equation with Kerr law nonlinearity. Nonlinear Dyn 112, 16355–16377 (2024). https://doi.org/10.1007/s11071-024-09872-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-024-09872-6