
Abstract
This study investigates an adaptive fixed-time tracking problem of nonlinear interconnected high-order systems with unknown control direction and stochastic disturbances. Under the framework of adaptive feedback, the backstepping method and fuzzy logic system are utilized to handle the stochastic disturbances and the packaged unknown nonlinearities. By utilizing the Nussbaum gain technique, an adaptive fixed-time controller is proposed to overcome the difficulties associated with unknown control directions. Distinguishing from the most existing results, a modified fixed-time control scheme is presented to deal with the positive odd integer terms from the interconnected high-order system with the help of adding a power integrator method. The designed control strategy guarantees that the tracking error converges within a fixed settling time and all signals of the closed-loop system are fixed-time stable. Simulation results validate the designed control approach.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
In the past decades, adaptive intelligent control containing fuzzy control or neural network control has garnered increasingly attention because it can handle the uncertainty of nonlinear system and guarantee the satisfactory tracking performance of the closed-loop system. A significant amount of achievements have been already made [1,2,3,4,5,6]. The adaptive fuzzy control methods have been presented for nonlinear single-input and single-output (SISO) system [1,2,3] and multi-input multi-output (MIMO) system [4, 5]. The adaptive neural network control methods have been studied for SISO system [6] and MIMO system [7, 8]. Furthermore, there are many intelligent control schemes for nonlinear interconnected system, which is consisted of a series of interconnected subsystems. The decentralized control technology, as an effective design approach, has attracted considerable attention and made numerous significant achievements [9,10,11,12]. The aforementioned control schemes do not take into account the control problems of high-order system with the positive odd integer terms. It is meaningful to research the consensus tracking control strategies for the nonlinear high-order interconnected system, and a plenty of significant achievements have been presented in [13, 14]. Among them, the literature [13] solves the low-complexity tracking control problem for a class of nonlinear large-scale high-order systems with uncertain high powers. In [14], the adaptive backstepping event-triggered control strategy has been investigated for uncertain interconnected high-order system by designing an adaptive observer.
As is known to all, stochastic disturbances often occur in practical control system, which are caused by the system oscillation or inaccuracy source. Many promising achievements on nonlinear interconnected stochastic system have been carried out [15,16,17,18]. In [15], an adaptive tracking controller is designed for nonlinear interconnected system with stochastic disturbances by using dynamic surface. The continuously asymptotic tracking control scheme has been proposed for nonlinear interconnected stochastic system in [16]. The output-feedback control problem of the nonlinear interconnected stochastic system has been addressed by the adaptive control scheme and backstepping technology [17] and [18]. Further, the adaptive state-feedback fuzzy control approaches have been developed for a class of nonlinear high-order system with stochastic disturbances [19,20,21].
To improve the steadiness of the controlled system, a great deal of progressive results put forward the concept of finite time control scheme, which has been widely considered in different fields [22,23,24,25]. In comparison with these results, the convergence time of fixed-time control does not rely on the initial condition. Thus, fixed-time control can eliminate the dependence on initial conditions, and many related constructive achievements have been developed for a class of nonlinear system [26,27,28,29,30,31,32,33]. Fixed-time control algorithm has been reported to solve the design difficult caused by uncertain linear plants, which guarantees all signals of controlled system can maintain global fixed-time stability [26]. The problem of fixed-time control has been studied for nonlinear systems with the stochastic disturbance in [27]. On the basis of these results, fault-tolerant control method has been considered to solve the actuator faults in [28]. In [29], an adaptive backstepping fixed-time control approach has been presented for nonlinear interconnected system with unknown system uncertainties. The output-feedback control problem of a class of interconnected system has been studied by the adaptive fixed-time controller in [30]. In [31] and [32], fixed-time control problems of nonlinear interconnected system with stochastic disturbances have been addressed by the adaptive fixed-time control method, where the stochastic disturbance can be handled and the controlled system can keep steady. For the nonlinear interconnected high-order system, there is only one literature about designing a fixed-time control scheme to solve the output tracking problem of controlled system [33]. However, there exist plenty of considerable achievements on fixed-time control for nonlinear interconnected systems with stochastic disturbances, but there are few outcomes about the fixed-time control for interconnected high-order system with stochastic disturbances. In brief, it is a challenging and meaningful topic in developing an adaptive fixed-time controller for nonlinear interconnected high-order system with stochastic disturbances, which is still open for research.
From what has been discussed above, an adaptive fuzzy fixed-time control strategy is investigated for nonlinear interconnected high-order system with stochastic disturbances and unknown control direction. In the design process of control scheme, the method named adding a power integrator is employed to eliminate the effect of high-order terms of the nonlinear interconnected high-order system. On the basis of the Nussbaum gain functions and the fuzzy logic system technique, the adaptive fuzzy control scheme is proposed to solve the stochastic term and unknown control direction of nonlinear interconnected high-order system. According to the definition of fixed-time control, an adaptive fixed-time control approach is investigated to ensure that the outputs signal can track the desired trajectory and all signals can maintain semi-globally fixed-time steady. The main contributions are summarized as follows:
-
1.
An adaptive fixed-time fuzzy decentralized control strategy is developed for a class of nonlinear large-scale high-order stochastic systems for the first time. Both stochastic disturbances and unknown control direction are taken into consideration, which enhances the robustness and steadiness of the system.
-
2.
The tracking control problem of nonlinear interconnected high-order systems is discussed by using the adding power integrators method, where the considered system is nonlinear large-scale high-order (i.e., \(p_i\ge 1\)) but not high-dimensional.
-
3.
By introducing Nussbaum gain functions, the difficulties caused by the unknown control direction and the interconnection of subsystems are overcome successfully.
The remainder of this paper can be outlined as follows. The problem statement and basic assumptions are introduced in Sect. 2, and the controller design and analysis are derived in Sect. 3. The simulation example is provided in Sect. 4. Finally, Sect. 5 summarizes this work.
2 Preliminaries and problem description
In this research, the nonlinear interconnection high-order system is composed of N subsystems. The ith subsystem is shown as:
where \({\bar{x}}_{i}=[x_{i,1}, x_{i,2},...., x_{i,n_i}]^T\in R^{n_i}\) denotes the state variables, \(y_i\in R\) expresses the system output, and \(p_{i,j}\ge 1\) shows positive odd numbers with \(i=1,..., N, j=1, 2,..., n_i\). \(h_{i,j}({\bar{x}}_i)(i=1, 2,... N, j=1,2,....,n_i)\) are unknown continuous interconnected terms which exist in each subsystem where \(h_{i,j}({\bar{x}}_i)(0)=0\). \(\omega \) is an r-dimensional standard Wiener process defined on the complete probability space (\(\Omega , F, P\)), where \(\Omega , F\) and P denote the sample space, the \(\sigma \)-field and the probability measure, respectively. \(g_{i,j}(\cdot ):R^n\rightarrow R^r\) represents the uncertain smooth functions. The control directions are referred to as the signs of \(d_i(t)\), which are assumed to be unknown.
The aim of this paper is that the adaptive fixed-time fuzzy control project is developed for the nonlinear interconnection high-order system (1) with stochastic disturbances and unknown control direction such that the controlled system remain semi-global stability and all the signals are bounded in fixed time. Consequently, the assumptions and lemmas can be considered:
Assumption 1
[34]: The desired trajectory \(y_{i,d}(t)\) and its j-order derivative \(y^j_{i,d}(t)\) denote the known, continuous and bounded functions.
Assumption 2
[35]: Positive odd integer \(p_{i,j}\) satisfies:
where \(p_i=\max \{p_{i,j}\}, j=1, 2,..., n\).
Assumption 3
[17]: The interconnections among subsystems \(h_{i,j}({x}_{i})\) satisfy \(|h_{i,j}({x}_{i})|\le \Delta _{i,j}({\bar{x}}_{i,j})\) with \(\Delta _{i,j}(\cdot )\) being uncertain continuous functions.
Definition 1
[36]: Consider the system
with \(x\in R^n\) and \(\omega \) being state variable and the r-dimensional independent standard Wiener process, respectively. If any initial state is satisfied \(x_0 \in \Xi \), where \(\Xi \) denotes the compact set, the system (3) is semi-globally practically fixed-time steady. The settling time function \(T(x_0, \omega )\) is bounded, and the upper bound \(T_{max}>0\) is an known constant. In other words, \(E(T(x_0,\omega ))\le T_{max}, \forall x_0 \in \Xi \).
Lemma 1
[36]: For the stochastic system (3) with any initial state \(x_0 \in \Xi \). Define the positive radially unbounded Lyapunov function \(V(x)\in C^2\), if there exist constants \(\eta _1, \eta _2>0, 0<\gamma <1, \chi > 1\) and \(\vartheta > 0\) such that
Hence, the system (3) remains semi-globally fixed-time steady in probability and the settling time \(T_s\) is expressed as follows:
where \(\lambda \in (0,1)\). And the residual set of the solution for (3) can be derived as
Lemma 2
[37]: Defining \(x, y\in R\), one holds
with \(m>0\), \(p>0\), \(q>0\).
Lemma 3
[37]: For any real numbers \(a_1,...a_n\) and \(c\in (0,1)\), the following inequality has
Lemma 4
[37]: For \(x_i\ge 0, i=1,...,n\), we have
Lemma 5
[38]: Consider a continuous function \(f\left( Z\right) \) on the bounded closed set \(\Omega _{Z}\). For the positive constants \(\varepsilon _0\), there is a fuzzy system \(W^{T}S\left( Z\right) \), which is satisfied
with \(W=\left[ \omega _{1},\omega _{2},\cdots ,\omega _{n}\right] ^{T}\) being the excepted weight vector. \(S\left( Z\right) =\frac{\left[ s_{1}\left( Z\right) ,s_{2}\left( Z\right) ,\cdots ,s_{N}\left( Z\right) \right] ^{T}}{\sum \limits _{i=1}^{N}s_{i}\left( Z\right) }\) expresses the fuzzy basic function vector with N being the number of fuzzy ruler and \(s_i(Z)\) can be expressed by
where \(\varsigma _{i}=\left[ \varsigma _{i1},\varsigma _{i2},\cdots ,\varsigma _{in}\right] ^{T}\) and \(\eta _{i}\) indicate the center and width vector of Gaussian function, respectively.
Lemma 6
[35]: Define the given positive odd integer \(p\ge 1\); we can get
where \(\alpha , \beta \) denote the real-valued function.
Lemma 7
[35]: For an known constant \(d\ge 0\), there exists the formula satisfying
with
In this work, the term \(d=p_i-1\) needs further judgment. For simplify, the above two cases (\(d<1\) and \(d\ge 1\)) are shown as follows:
Definition 2
[39]: Assume the smooth function N(K) as a function of Nussbaum type satisfying
The following lemma about stochastic differential equation is given as
where the definition of x and w in (1) and (18) is alike. Define \(V(x,t)\in R^n\times R_+\) as nonnegative functions on \(C^{2,1}:R^n\times R_+\), which are continuously twice differentiable in x and one differentiable in t.
Lemma 8
[39]: For the above stochastic system (18), \(V(x,t)\in C^{2,1}:R^n\times R_+\) and \(K(t):R_+\rightarrow R\) are defined as smooth bounded functions, and \(N(\cdot )\) is a smooth Nussbaum-type function. If the inequality below has
with \(c_0>0\) being a nonnegative random variable, S(t) denotes a real-valued continuous local martingale where \(M(0)=0\) and V(x, t), K(t), \([d_i(t)N(K_i)+1]{\dot{K}}\) are bounded.
Definition 3
[40]: In consideration of the stochastic system as \(dx=f(x,t)dt+h(x,t)d\omega \), if V is a function of x, one holds
3 Controller design process
The adaptive fixed-time control strategy is presented by fuzzy logic system technology and the backstepping control approach which is applied by coordinate transformation as follows:
To simplify the control process, we can define \(h_{i,j}(\bar{{x}}_i)=h_{i,j}, g_{i,j}(\bar{{x}}_{i,j})=g_{i,j}\) for \(i=1, 2,..., N, j=1,..., n_i\).
Step i, 1. From (1) and (21), one has
Consider the following Lyapunov function
where \({\tilde{\theta }}_{i}=\theta _i-{\hat{\theta }}_i\) with \({\hat{\theta }}_i\) being the approximation of the uncertain parameter \(\theta _i\) and \(\lambda _i\ge 0\) being an known constant.
The term \({\mathcal {L}}{V}_{i,1}\) can be expressed by
According to the Young’s inequality, one holds
Substituting (25) and (26) into (24) gets
where \({\bar{f}}_{i,1}({\hat{Z}}_{i,1})=\frac{p_i-p_{i,1}+3}{4}z_{i,1}^{p_i-p_{i,1}+1}\Vert g_{i,1}\Vert ^4 -{\dot{y}}_{i,d}+z_{i,1}^{p_{i,1}}+\frac{1}{2}z_{i,1}^{p_i-p_{i,1}+3}\Delta _{i,1}^2+\frac{1}{2}z_{i,1}^{p_i-p_{i,1}+3}\) with \({\hat{Z}}_{i,1}=[x_{i,1}, y_{i,d}, {\dot{y}}_{i,d}]^T\).
According to Lemma 5, the fuzzy logic system \(W_{i,1}^{T}S_{i,1} ({\hat{Z}}_{i,1})\) can be introduced to approximate the unknown function \({\bar{f}}_{i,1}({\hat{Z}}_{i,1})\); we can get
with \(\delta _{i,1}({\hat{Z}}_{i,1})\) indicating the estimation error and \(\varepsilon _{i,1}>0\).
Then, we can obtain by using Young’s inequality
where \(\theta _i=\Vert W_{i,1}\Vert ^{2}\) and \(a_{i,1}>0\)
Based on (46), we can get
Choose virtual control signal \(\alpha _{i,1}\) as
where \(c_{i, 11}\) and \(c_{i, 12}\) are both positive given parameters.
So, the \({\mathcal {L}}{V}_{i,1}\) can be further written as
Based on Lemma 6 and Lemma 7, we can get
Next, let \(p=p_i-p_{i,1}+3, q=p_{i,1}, m=\frac{p_i+3}{p_i-p_{i,1}+3} \times \frac{1}{p_{i,1}2^{p_{i,1}}}\) of Lemma 2, one holds
where \(\rho _{i,11}=\frac{(2^{p_{i,1}-1}+1)p_{i,1}^2}{p_i+1}(\frac{p_i+3}{p_i-p_{i,1}+3}\frac{1}{p_{i,1}2^{p_{i,1}}}) ^{-\frac{p_i-p_{i,1}+3}{p_{i,1}}} \alpha _{i,1}^{\frac{(p_i+3)(p_{i,1}-1)}{p_{i,1}}}\).
By using the same above method with \(p=p_i-p_{i,1}+3, q=p_{i,1}, m=\frac{p_i+3}{p_i-p_{i,1}+3}\frac{1}{p_{i,1} 2^{p_{i,1}}}\), we can get
where \(\rho _{i, 12}=p_{i,1}2^{p_{i,1}-1}(\frac{p_i+3}{p_i-p_{i,1}+3}\frac{1}{p_{i,1} 2^{p_{i,1}}})^{-\frac{p_i-p_{i,1}+3}{p_{i,1}}}\).
Next, substituting the above inequalities into (32) gives
With the support of Lemma 2, one has
Therefore, \({\mathcal {L}}{V}_{i,1}\) becomes
where \(D_{i,1}=\frac{1}{2} +\frac{1}{4}(p_i-p_{i,1}+3)+\frac{1}{2}a_{i,1}^2+\frac{1}{2}\varepsilon _{i,1}^2 +\frac{1}{4}(\frac{4c_{i,11}}{3})^{-3}\).
Step i, j \((2\le j\le n_i-1)\). According to (21), \(d{z}_{i, j}\) can be expressed by
The Lyapunov function can be designed as
With the help of (21) and (40), one has
According to the Young’s inequality, one holds
Substituting (42) and (43) into (41) gets
where \({\bar{f}}_{i,j}({\hat{Z}}_{i,j})=\frac{1}{2}z_{i,j}^{p_i-p_{i,j}+3}\Delta _{i,j}^2-\dot{\alpha }_{i,j-1} +\frac{1}{4}(p_i-p_{i,j}+3)z_{i,j}^{p_i-p_{i,j}+1}\Vert g_{i,j}\Vert ^4+z_{i,j}^{\frac{p_i+3}{p_{i,j-1}}-(p_i-p_{i,j}+3)}\rho _{i,j-1,1} +z_{i,j}^{p_{i,j}}\rho _{i,j-1,2}+z_{i,j}^{p_{i,j}}+\frac{1}{2}z_{i,j}^{p_i-p_{i,j}+3}\) with \({\hat{Z}}_{i,j}=[x_{i,j}, y_{i,d}, {\dot{y}}_{i,d},..., y_{i,d}^{(j)}]^T\).
With the help of Lemma 5, the unknown packaged function \({\bar{f}}_{i,j}({\hat{Z}}_{i,j})\) can be solved by the fuzzy logic system \(W_{i,j}^{T}S_{i,j}({\hat{Z}}_{i,j})\)
where \(\delta _{i,j}({\hat{Z}}_{i,j})\) denotes a estimation error and \(\varepsilon _{i,j}>0\).
Then, we can obtain by using Young’s inequality
where \(a_{i,j}>0\) is a given parameter.
With the help of (46), one holds
Choose virtual control signal \(\alpha _{i,j}\) as
where \(c_{i,j1}\) and \(c_{i,j2}\) are both positive given parameters.
So, the \({\mathcal {L}}{V}_{i,j}\) is further rewritten as
Similar to the Step 1, one holds
where \(\rho _{i,j1}=\frac{(2^{p_{i,j}-1}+1)p_{i,j}^2}{p_i+1}(\frac{p_i+3}{p_i-p_{i,j}+3}\frac{1}{p_{i,j}2^{p_{i,j}}}) ^{-\frac{p_i-p_{i,j}+3}{p_{i,j}}} \alpha _{i,j}^{\frac{(p_i+3)(p_{i,j}-1)}{p_{i,j}}}\) and \(\rho _{i, j2}=p_{i,j}2^{p_{i,j}-1}(\frac{p_i+3}{p_i-p_{i,j}+3} \times \frac{1}{p_{i,j} 2^{p_{i,j}}})^{-\frac{p_i-p_{i,j}+3}{p_{i,j}}}\).
Next, substituting the above equation into (49) gives
With the support of Lemma 2, one has
Therefore, \({\mathcal {L}}{V}_{i,j}\) becomes
where \(D_{i,j}=D_{i,j-1}+\frac{1}{2}+\frac{1}{4}(p_i-p_{i,j}+3)+\frac{1}{2}a_{i,j}^2+\frac{1}{2}\varepsilon _{i,j}^2 +\frac{1}{4}(\frac{4c_{i,j1}}{3})^{-3}\).
Step \(i, n_i\). The derivative of \(z_{n_i}\) becomes
Take into account the Lyapunov function as follows:
The time derivative of \(V_{i,n_i}\) can be expressed by
According to the Young’s inequality, one holds
Substituting (57) and (58) into (56) gets
where the unknown nonlinear function is \({\bar{f}}_{i,n_i}({\hat{Z}}_{i,n_i})=\frac{1}{2}z_{i,n_i}^{p_i-p_{i,n_i}+3}\Delta _{i,n_i}^2-\dot{\alpha }_{i,n_i-1} +\frac{p_i-p_{i,n_i}+3}{4}z_{i,n_i}^{p_i-p_{i,n_i}+1}\Vert g_{i,n_i}\Vert ^4 +z_{i,n_i}^{\frac{p_i+3}{p_{i,n_i-1}}-(p_i-p_{i,n_i}+3)}\rho _{i,n_i-1,1} +z_{i,n_i}^{p_{i,n_i}}\rho _{i,n_i-1,2}+z_{i,n_i}^{p_{i,n_i}}+\frac{1}{2}z_{i,n_i}^{p_i-p_{i,n_i}+3}\) with \({\hat{Z}}_{i,n_i}=[x_{i,n_i}, y_{i,d}, {\dot{y}}_{i,d},..., y_{i,d}^{(n_i)}]^T\).
On the basis of Lemma 5, the unknown function \({\bar{f}}_{i,n_i}({\hat{Z}}_{i,n_i})\) is handled by using the fuzzy logic system \(W_{i,n_i}^{T}S_{i,n_i}({\hat{Z}}_{i,n_i})\)
with \(\delta _{i,n_i}({\hat{Z}}_{i,n_i})\) being an approximation error and \(\varepsilon _{i,n_i} >0\) being a positive constant.
Then, we can obtain by using Young’s inequality
where \(a_{i,n_i}>0\) is a given parameter.
With the help of (61), we can obtain
Choose virtual control signal \(u_{i}\) as
with \(c_{i,n_i,1}>0\) and \(c_{i,n_i,2}>0\) being the given parameters.
So, \({\mathcal {L}}{V}_{i,n_i}\) can be further written as
With the support of Lemma 2, one has
So, \({\mathcal {L}}{V}_{i,n_i}\) becomes
where \(D_{i,n_i}=D_{i,n_i-1}+\frac{1}{2}+\frac{1}{4}(p_i-p_{i,n_i}+3)+\frac{1}{2}a_{i,n_i}^2+\frac{1}{2}\varepsilon _{i,n_i}^2 +\frac{1}{4}(\frac{4c_{i,n_i,1}}{3})^{-3}\).
The adaptive laws are given by
where \(\sigma _{i}\) and \(\iota _{i}\) are known positive parameters.
Therefore, we can obtain
Theorem 1
Consider the nonlinear interconnected high-order stochastic system (1) with Assumption 1- 3, the virtual control input \(\alpha _{i,j}\), \(j=1,...,n_i-1\) (48), real controller \(u_i\) (64), and adaptive law \(\dot{{\hat{\theta }}}_i\) (68), all signals of the controlled system can remain fixed-time stable and the tracking error can converge into a small area at the fixed time.
Proof
For an known constant \(0<\mu <1\), based on Lemma 2, we define \(m=\frac{3}{4}(p_i-p_{i,1}+4), n=\frac{3}{4}(p_i+3)-\frac{3}{4}(p_i-p_{i,1}+4), x=z_{i,1}, y=\mu \), one has
It can be converted in the following form:
By considering Lemma 3 and Lemma 4, we can obtain
In the same way, we can get
Thus, \({\mathcal {L}}{V}_{i}\) can be rewritten as
where \({\bar{c}}_{i,1}=\sum _{i=1}^N\sum _{k=1}^{n_i}\mu _{i,k}^{\frac{3}{4}(p_i+3-(p_i-p_{i,k}+4))}\), \({\bar{c}}_{i,2}=\sum _{i=1}^N\sum _{k=1}^{n_i}c_{i,k2}\mu _{i,k}^{2(p_i+3-(p_i-p_{i,k}+4))}\), \(D_{i}=\sum _{i=1}^N\sum _{k=1}^{n_i} \frac{p_i+3-(p_i-p_{i,k}+4)}{p_i+3}\mu _{i,k}^{\frac{3}{4}(p_i+3)} +\sum _{i=1}^N\sum _{k=1}^{n_i}\frac{p_i+3-(p_i-p_{i,k}+4)}{p_i+3} \mu _{i,k}^{2(p_i+3)}+D_{i,n_i}\).
Since \({\hat{\theta }}_i{\tilde{\theta }}_i\le -\frac{{\tilde{\theta }}_i^2}{2}+\frac{\theta _i^2}{2}\), we have
By subtracting and adding the term \((\frac{\sigma _i}{2\lambda _i}{\tilde{\theta }}_i^2)^\frac{3}{4}\), combining (75) with (74), we can get
According to Lemma 2, choosing \(\phi =1, \varphi =\frac{\sigma _i}{2\lambda _i}\theta _i^2, p=1-\gamma , q=\gamma , m=e^{(\gamma /(1-\gamma ))\ln \gamma }\), one holds
Now, (77) can be rewritten by designing \(\gamma =\frac{3}{4}\).
where \(\gamma _1=\frac{27}{256}>0\).
Substituting (78) into (76), one holds
where \({\tilde{D}}_{i}={D}_{i}+\frac{\sigma _i}{2\lambda _i}\theta _i^2+\gamma _1\)
For the term \(\frac{\iota _i}{\lambda _i^2}{\tilde{\theta }}_i{\hat{\theta }}_i^3\), it can be dealt with as follows:
So, (79) can be rewritten as
By utilizing the Yong’s inequality, we can get
Therefore, we can obtain
where \({\check{D}}_i=\frac{3\iota _i}{4\varepsilon ^4\lambda _i^2}\theta _i^4+\frac{\iota _i}{12\lambda _i^2}\theta _i^4+{\tilde{D}}_i\), \({\check{c}}_{i,1}=\sum _{i=1}^N\sum _{k=1}^{n_i}{\bar{c}}_{i,1} (p_{i}-p_{i,k}+4)^{\frac{3}{4}}, {\check{c}}_{i,2}=\sum _{i=1}^N\sum _{k=1}^{n_i}{\bar{c}}_{i,2}{\bar{c}}_{i,1}(p_{i}-p_{i,k}+4)^2\)
Defining \({\hat{c}}_1=\min \{\sum _{i=1}^N{\tilde{c}}_1,\sigma _i\}, {\hat{c}}_2=\min \{\sum _{i=1}^N{\bar{c}}_{i,2}, 4\iota _i-9\iota _i\varepsilon ^\frac{4}{3}\}\), we have
The whole Lyapunov function candidate can be chosen as
Hence, we can get
where \(\acute{c}_2=\frac{{\hat{c}}_2}{2n}\)
The whole proof process is divided into two parts: Part 1: the boundedness of \(V_i\) and Part 2: the fixed-time convergence of \(V_i\).
Part 1: According to (87), one obtains
Multiplying both sides of (88) by \(e^{\acute{c}_2t}\) and integrating it over [0, t], one has
Integrating (89) over \([0, t_1]\), we have
From Lemma 8, it can be seen that \(e^{-\acute{c}_2t}\int _0^{t_1}e^{\acute{c}_2t}\frac{{\check{D}}_{i}}{\acute{c}_2}dw\) is a real-valued continuous local martingale. So, we can get \(V_i(t)\), \(K_i(t)\) and \(\int _0^{t_1}e^{\acute{c}_2t}[d_i(t)N(K_i)+1]{\dot{K}}_idt\) are guaranteed to be bounded. Let \(\eta \) be the upper bound of the term \(e^{-\acute{c}_2t}\int _0^{t_1}e^{\acute{c}_2t}[d_i(t)N(K_i)+1]{\dot{K}}_idt\), we can obtain \(e^{-\acute{c}_2t}\int _0^{t_1}E(d_i(t)N(K_i)+1){\dot{K}}_ie^{\acute{c}_2t}dt \le \int _0^{t_1}E(d_i(t)N(K_i)+1){\dot{K}}_ie^{\acute{c}_2(t-{t_1})}dt\le \eta \) with \(E(\cdot )\) being the expectation operator. By using the expectation of (90), we can get \(EV_i\le EV_i(0)+\eta \). Hence, \(z_{i,j}\) and \(x_{i,j}\) are bounded. In short, it can be indicated that tracking error approaches to a small residual set within a fixed time and all the signals of the controlled system remain bounded.
Part 2: Based on Lemma 1, we can conclude that the tracking errors will converge to a small region \({\hat{D}}_i+ e^{-\acute{c}_2t}\int _0^{t_1}e^{\acute{c}_2t}[d_i(t)N(K_i)+1]{\dot{K}}_idt\) in fixed time T.
where \(0<\tau <1\). \(\square \)
4 Simulation
Example 1: Numerical Example
To test the effectiveness of the control strategy, two control methods are used to carry out simulation and comparison experiments: (a) fixed-time control method and (b) control method without considering fixed-time. The considered nonlinear interconnected high-order system is selected as follows
with \(h_{i,1}({\bar{x}}_{i})=sin(x_{i,1}x_{i,2})\), \(h_{i,2}({\bar{x}}_{i})=cos(x_{i,1}x_{i,2})\), \(g_{i,1}({\bar{x}}_{i,1})=0.01\sin (x_{i,1})\), \(g_{i,2}({\bar{x}}_{i,2})=0.01\sin (x_{i,2})\) for \(i=1, 2\). The desired trajectory can be chosen as \(y_{i,d}=\sin (t)\).
Afterward, fuzzy control scheme is introduced to handle the unknown nonlinearities, where the fuzzy sets are designed in the interval [-5, 5]. Fuzzy membership functions can be selected as \(\mu _{i,1}=e^{-0.5(x_1-j)^2}, j=-5,-4,...,4,5\), \(\mu _{i,2}=e^{-0.5(x_1-j)^2-0.5(x_2-l)^2}, j,l=-5, -4,...,4,5\). The initial conditions are \(x_{1,1}(0)=0, x_{1,2}(0) =0, x_{2,1}(0)=0, x_{2,2}(0)=0\), \({\hat{\theta }}_1(0)={\hat{\theta }}_2(0)=0, K_1(0)=0.1, K_2(0)=1.25\).
-
(a)
Fixed-time control method: the fixed-time adaptive fuzzy controllers are constructed whose control parameters are chosen as follows: \(c_{i,11}=40, c_{i,12}=15, c_{i,21} =15, c_{i,22}=20, \lambda _1=\lambda _2=1, \iota _1=\iota _2=1, \sigma _1=\sigma _2=5, a_1=a_2=1\).
-
(b)
Control method without considering fixed-time: adaptive control approach without considering fixed-time is proposed to compare with the control method in this paper. The corresponding control parameters are selected as: \(c_{i,11}=2.5, c_{i,12}=0.5, c_{i,21}=2.5, c_{i,22}=0.5, \lambda _1=\lambda _2=1, \iota _1=\iota _2=1, \sigma _1=\sigma _2=5, a_1=a_2=1\).
Figures 1, 2, 3, 4, 5, 6 and 7 show the simulation comparison results. Figures 2, 3, 4 and 5 introduce the tracking performance of \(x_{i,1}\) and \(y_d\) and the tracking error \(z_{i,1}\) with and without fixed-time control. Figures 6 and 7 propose the boundedness of adaptive parameter \({\hat{\theta }}_i (i=1, 2)\) and actual control input \(u_i (i=1, 2)\), respectively. Finally, Fig. 8 indicates the system state \(x_{i,2}\). It can be seen that the controlled system is semi-global fixed-time stable and the tracking error converges to a small area at fixed time.

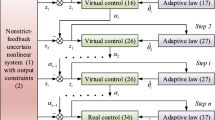
Block diagram of the design procedure for the proposed controller

The system output \(y_1\) and reference signal \(y_{1d}\) with fixed-time controller and without fixed-time controller

The system output \(y_2\) and reference signal \(y_{2d}\) with fixed-time controller and without fixed-time controller

The trajectories of the tracking error \(z_1\) with fixed-time controller and without fixed-time controller

The trajectories of the tracking error \(z_2\) with fixed-time controller and without fixed-time controller

The adaptive parameter \({\hat{\theta }}_1, {\hat{\theta }}_2\)

The actual control inputs \(u_1\) and \(u_2\)

The system states \(x_{1,2}\) and \(x_{2,2}\)
Example 2: Practical Example
The practical control system of two inverted pendulums connected by a spring is employed [41]. Let \(\theta _1=x_{1,1}, \theta _2=x_{2,1}, \dot{\theta }_1=x_{1,2}, \dot{\theta }_2=x_{2,2}\), and the system model of the inverted pendulum with disturbances \(g_{i,1}=0.01\sin (x_{1,1})\) and \(g_{i,2}=0.01\sin (x_{1,2})\). Therefore, the model can be described as follows:
where the outputs \(y_1\) and \(y_2\) are the angular displacements of the pendulum from the vertical reference. The pendulum masses are given as: the end masses of pendulum are \(m_1=2\,kg\) and \(m_2=2.5kg\), the moments of inertia are \(J_1=0.5kg\) and \(J_2=0.625kg\), the constant of connecting spring is \(k=100 N/m\), the pendulum height is \(r=0.5m\), the natural length of the spring is \(l=0.5m\), and the gravitational acceleration is \(g=9.8m/s^2\). The distance between the pendulum hinges is \(b=0.4m\). \(g_{i2}({\bar{x}}_{i,2})=0.01\sin (x_{i,2})\) for \(i=1, 2\).
The design parameters are chosen as \(c_{i,11}=40, c_{i,12}=15, c_{i,21}=15, c_{i,22}=20, \lambda _1=\lambda _2=1, \iota _1=\iota _2=1, \sigma _1=\sigma _2=5, a_1=a_2=1\). The initial conditions and reference signals are chosen as \(x_{1,1}(0)=0.1, x_{1,2}(0)=0.3, x_{2,1}(0)=0.1, x_{2,2}(0)=0.3\), \({\hat{\theta }}_1(0)={\hat{\theta }}_2(0)=0, K_1(0) =0, K_2(0)=0\). The simulation results are shown in Figs. 9, 10, 11, 12 and 13. Based on the above simulation results, we can conclude that the signals within the closed-loop system remain fixed-time bounded, which implies that the good tracking performance is acquired.

The system output \(y_i\) and reference signal \(y_{id}\)

The trajectory of the tracking error \(z_1\)

The adaptive parameter \({\hat{\theta }}_1, {\hat{\theta }}_2\)

The actual control inputs \(u_1\) and \(u_2\)

The system states \(x_{1,2}\) and \(x_{2,2}\)
5 Conclusion
In this paper, a novel fixed-time adaptive fuzzy controller is designed for a class of nonlinear interconnected high-order stochastic system with unknown control direction. The unknown nonlinear functions and stochastic disturbances of the closed-loop system are handled by utilizing the fuzzy logic system. By combining the technique of adding the power integrator and Nussbaum gain functions, an adaptive backstepping control scheme is proposed for nonlinear interconnected high-order system, where the high-order terms and the design difficulties of unknown control directions are both handled. Based on the fixed-time theory, the fixed-time control strategy is designed for a class of nonlinear interconnected high-order system, which can ensure the property of fixed-time convergence and all the signals of the controlled system are fixed-time bounded. This paper considers both unknown control direction and stochastic disturbances, which can better meet the practical requirements. The validity of the presented control scheme can be tested by theoretical analysis along with simulation results.
In addition, the impact of the senor faults and actuator faults is not considered in this paper. More attention should be paid to the adaptive fixed-time control for the large-scale stochastic system with faults, which will be considered in our future research.
Data availability
Data sharing is not applicable to this article as no datasets were generated or analyzed during the current study. This work was supported in part by the National Natural Science Foundation of China under Grant 62173046.
References
Wang, X.: Stable adaptive fuzzy control of nonlinear systems. IEEE Trans. Fuzzy Syst. 1(2), 146–155 (1993)
Tong, S.: Adaptive fuzzy control for uncertain nonlinear systems. J. Control Decis. 6(1), 30–40 (2019)
Zhang, Q., Dong, J.: Disturbance-observer-based adaptive fuzzy control for nonlinear state constrained systems with input saturation and input delay. Fuzzy Sets Syst. 392(1), 77–92 (2020)
Su, H., Zhang, W.: Adaptive fuzzy control of MIMO nonstrict-feedback nonlinear systems with fuzzy dead zones and time delays. Nonlinear Dyn. 95(2), 1565–1583 (2019)
Kalat, A.A.: A robust direct adaptive fuzzy control for a class of uncertain nonlinear MIMO systems. Soft. Comput. 23(19), 9747–9759 (2019)
Li, B., Zhu, J., Zhou, R., et al.: Adaptive neural network sliding mode control for a class of SISO nonlinear systems. Mathematics 10(7), 1182 (2022)
Wang, S., Xia, J., Wang, X., et al.: Adaptive neural networks control for MIMO nonlinear systems with unmeasured states and unmodeled dynamics. Appl. Math. Comput. 408, 126369 (2021)
Wang, X., Yin, X., Wu, Q., et al.: Disturbance observer based adaptive neural control of uncertain MIMO nonlinear systems with unmodeled dynamics. Neurocomputing 313, 247–258 (2018)
Ma, M., Wang, T., Qiu, J., et al.: Adaptive fuzzy decentralized tracking control for large-scale interconnected nonlinear networked control systems. IEEE Trans. Fuzzy Syst. 29(10), 3186–3191 (2020)
Han, Q.: Design of decentralized adaptive control approach for large-scale nonlinear systems subjected to input delays under prescribed performance. Nonlinear Dyn. 106(1), 565–582 (2021)
Zhang, J., Li, S., Ahn, C.K., et al.: Decentralized event-triggered adaptive fuzzy control for nonlinear switched large-scale systems with input delay via command-filtered backstepping. IEEE Trans. Fuzzy Syst. 30(6), 2118–23 (2021)
Wang, Z., Huang, Y.S.: Robust decentralized adaptive fuzzy control of large-scale nonaffine nonlinear systems with strong interconnection and application to automated highway systems. Asian J. Control 21(5), 2387–2394 (2019)
Yoo, S.J., Kim, T.H.: Decentralized low-complexity tracking of uncertain interconnected high-order nonlinear systems with unknown high powers. J. Franklin Inst. 355(11), 4515–4532 (2018)
Yang, P., Chen, X., Zhao, X., et al.: Observer-based event-triggered tracking control for large-scale high-order nonlinear uncertain systems. Nonlinear Dyn. 105(4), 3299–3321 (2021)
Niu, B., Li, H., Zhang, Z., et al.: Adaptive neural-network-based dynamic surface control for stochastic interconnected nonlinear nonstrict-feedback systems with dead zone. IEEE Trans. Syst. Man Cybernet. Syst. 49(7), 1386–1398 (2018)
Zhang, Y., Shi, F., Gu, Y.: Continuously asymptotic tracking of disturbed interconnected systems with unknown control directions. Nonlinear Dyn. 109(4), 2723–2743 (2022)
Wang, H., Liu, P.X., Bao, J., et al.: Adaptive neural output-feedback decentralized control for large-scale nonlinear systems with stochastic disturbances. IEEE Trans. Neural Netw. Learn. Syst. 31(3), 972–983 (2020)
Hua, C., Li, K., Guan, X.: Event-based dynamic output feedback adaptive fuzzy control for stochastic nonlinear systems. IEEE Trans. Fuzzy Syst. 26(5), 3004–3015 (2018)
Fang, L., Ding, S., Park, J.H., et al.: Adaptive fuzzy control for stochastic high-order nonlinear systems with output constraints. IEEE Trans. Fuzzy Syst. 29(9), 2635–2646 (2020)
Sun, W., Su, S.F., Wu, Y., et al.: Adaptive fuzzy control with high-order barrier Lyapunov functions for high-order uncertain nonlinear systems with full-state constraints. IEEE Trans. Cybernet. 50(8), 3424–3432 (2019)
Wang, N., Tao, F., Fu, Z., et al.: Adaptive fuzzy control for a class of stochastic strict feedback high-order nonlinear systems with full-state constraints. IEEE Trans. Syst. Man Cybernet. Syst. 52(1), 205–213 (2020)
Bhat, S.P., Bernstein, D.S.: Continuous finite-time stabilization of the translational and rotational double integrators. IEEE Trans. Autom. Control. 43(5), 678–682 (1998)
Liu, Y., Jing, Y.: Practical finite-time almost disturbance decoupling strategy for uncertain nonlinear systems. Nonlinear Dyn. 95, 117–128 (2019)
Zhang, X., Li, C.: Finite-time stability of nonlinear systems with state-dependent delayed impulses. Nonlinear Dyn. 102(1), 197–210 (2020)
Qi, X., Liu, W.: Adaptive finite-time event-triggered command filtered control for nonlinear systems with unknown control directions. Nonlinear Dyn. 109(4), 2705–2722 (2022)
Polyakov, A.: Nonlinear feedback design for fixed-time stabilization of linear control systems. IEEE Trans. Autom. Control 57(8), 2106–2110 (2011)
Qi, X., Xu, S., Li, Y., et al.: Global fixed-time event-triggered control for stochastic nonlinear systems with full state constraints. Nonlinear Dyn. 111(8), 7403–7415 (2023)
Zhang, X., Tan, J., Wu, J., et al.: Event-triggered-based fixed-time adaptive neural fault-tolerant control for stochastic nonlinear systems under actuator and sensor faults. Nonlinear Dyn. 108(3), 2279–2296 (2022)
Li, Y., Zhang, J., Xu, X., et al.: Adaptive fixed-time neural network tracking control of nonlinear interconnected systems. Entropy 23(9), 1152 (2021)
Su, Y., Xue, H., Wang, Y., et al.: Command filter-based event-triggered adaptive fixed-time output-feedback control for large-scale nonlinear systems. Int. J. Syst. Sci. 52(15), 3190–3205 (2021)
Li, K., Li, Y., Zong, G.: Adaptive fuzzy fixed-time decentralized control for stochastic nonlinear systems. IEEE Trans. Fuzzy Syst. 29(11), 3428–3440 (2020)
Zhou, Q., Du, P., Li, H., Lu, R., Yang, J.: Adaptive fixed-time control of error-constrained pure-feedback interconnected nonlinear systems. IEEE Trans. Syst. Man Cybernet. Syst. 51(10), 6369–6380 (2021)
Li, H., Hua, C., Li, K.: Fixed-time stabilization for interconnected high-order nonlinear systems with dead-zone input and output constraint. J. Franklin Inst. 358(14), 6923–6940 (2021)
Bai, W., Wang, H.: Robust adaptive fault-tolerant tracking control for a class of high-order nonlinear system with finite-time prescribed performance. Int. J. Robust Nonlinear Control 30(12), 4708–4725 (2020)
Ling, S., Wang, H., Liu, P.X.: Adaptive tracking control of high-order nonlinear systems under asymmetric output constraint. Automatica 122, 109281 (2020)
Zhang, X., Tan, J., Wu, J., Chen, W.: Event-triggered-based fixed-time adaptive neural fault-tolerant control for stochastic nonlinear systems under actuator and sensor faults. Nonlinear Dyn. 108(3), 2279–2296 (2022)
Wang, F., Chen, B., Liu, X., Lin, C.: Finite-Time adaptive fuzzy tracking control design for nonlinear systems. IEEE Trans. Fuzzy Syst. 26(3), 1207–1216 (2018)
Wang, L.X.: Stable adaptive fuzzy control of nonlinear systems. IEEE Trans. Fuzzy Syst. 1(2), 146–155 (1993)
Wang, Y., Zhang, H., Wang, Y.: Fuzzy adaptive control of stochastic nonlinear systems with unknown virtual control gain function. Acta Automatica Sinica. 32(2), 170–178 (2006)
Wang, H., Liu, K., Liu, X., Chen, B., Lin, C.: Neural-based adaptive output-feedback control for a class of nonstrict-feedback stochastic nonlinear systems. IEEE Trans. Cybernet. 45(9), 1977–1987 (2015)
Spooner, J., Passino, K.: Decentralized adaptive control of nonlinear systems using radial basis neural networks. IEEE Trans. Autom. Control 44(11), 2050–2057 (1999)
Funding
This work was supported in part by the National Natural Science Foundation of China under Grant 62173046.
Author information
Authors and Affiliations
Corresponding authors
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Bai, W., Liu, P.X. & Wang, H. Fixed-time adaptive fuzzy control for nonlinear interconnection high-order systems with unknown control direction. Nonlinear Dyn 111, 17079–17093 (2023). https://doi.org/10.1007/s11071-023-08724-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-023-08724-z