
Abstract
A linear oscillator subjected to multiplicative Gaussian white noise in both frequency and input signal fluctuation has been investigated in this paper. We mainly focus on the studies of the stochastic resonance(SR). Using the properties of Brownian motion and itô formula, we obtain the analytic expressions of both the first-order and second-order moment of the system’s stationary response. And the signal-to-noise ratio is introduced to analyze the influence of fluctuation in this system. It is worth mentioning that we solve the generalized Langevin equation with mathematical methods. Meanwhile, we discuss the variation of the output amplitude with the parameters of the system. We find that there is no SR in the first-order moment expression, while both SR and inverse stochastic resonance phenomena exist in the second-order moment expression, which have not been reported in the previous study.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
The vibration phenomena widely exist in our daily life as well as in various types of engineering systems [1,2,3]. Among them, the simple harmonic vibration plays a critical role in the study of the vibration phenomena. So far, the dynamic behavior of harmonic oscillators without noise has been widely studied [4]. However, in natural science, especially in the study of vibration phenomena, stochastic forces exist almost everywhere. Thus, in order to describe the phenomenon more realistically, it is crucial to consider the effect of the stochastic forces on natural phenomena. More precisely, the stochastic forces, according to their origins, can be divided into internal noise and external noise [5, 6]. The internal noise, which usually appears as additive noise, is caused by the irregular collisions of the internal molecules within the system. On the other hand, the external noise, which usually appears as multiplicative noise, originates from the fluctuation of external input signal or parameters. By the way, compared with the external noise, the influence of the internal thermal fluctuation noise is generally small; therefore, the internal noise can be ignored [5].
However, when considering the external noise of the system, many researchers only focus on the multiplicative fluctuation of the system intrinsic parameters [7,8,9,10], while we consider the multiplicative fluctuation in the input signal as well. Moreover, the study on the fluctuation of the system affected by multiplicative noise mainly focused on the multiplicative dichotomous or trichotomous noise, and few studies analyze the systems fluctuated by multiplicative white noise. As a result, we take Gaussian white noise as multiplicative fluctuation of frequency and input signal of the system.
As for a harmonic oscillator, the system can be described by the Langevin equation. Thus, if we take Gaussian white noise into account, the solution of the equation can be described as a Wiener process. Bernt Øksendal introduced Brownian motion and stochastic calculus in 2003 [11]; thus, the solution of the system is itô process precisely. And with the theory of stochastic differential equation, that a function of an itô process \(X_t\) and time t which is twice continuously differentiable in \(X_t\) and once continuously differentiable in t satisfies the conditions of itô formula [12], we can derive the analytic expression of the displacement of the system.
In this paper, we study the phenomenon of stochastic resonance (SR). The concept of SR was first introduced by Benzi [13] to explain the periodic recurrence of ice ages on Earth in 1981. And the term SR is a nonlinear synergistic effect of non-monotonicity among system parameters, noise and periodic input signals of a physical system [14]. The phenomenon of SR shows that, under certain conditions, when appropriately increasing the input noise, the ordered component of the system output will greatly increase instead of decreasing. The phenomenon of SR has attracted considerable interest due to many applications in biology [15,16,17,18], physics [19, 20], chemistry [21], signal detection and recovery [22, 23], circuit [24], molecular motor [25]. Thus, the mathematical modeling and parameter analysis of SR will be of great importance, which can potentially provide theoretical support for applications. Li et al. [26] hold the view that SR takes place only for multiplicative colored noise, but disappears for white noise, which is verified by us. However, we find that SR occurs in the second-order moment solution. As we change the parameters of the system, the phenomenon of inverse stochastic resonance (ISR) [27, 28] appears instead of SR. The term ISR is similar to SR but consists of an unexpected depression in the response of a system under external noise [27]. Though we mainly focus on SR instead of ISR, we hope our work could be helpful in the research of ISR.
Before us, Zhang et al. [29] use Taylor series to approximate the nonlinear expression of Gaussian white noise to analyze the damped linear oscillator model. Though their results go against that SR disappears for white noise, they built a constructed role in the study of linear system with Gaussian white noise. Furthermore, Cao et al. [30] studied a linear system driven by correlated Gaussian colored noise instead of Gaussian white noise. And they focused on signal-modulated noise, while we are going further, focusing on frequency and input signal fluctuation of the system. Thus, we would like to explore the SR phenomenon in a linear oscillator subjected to multiplicative Gaussian white noise in both frequency and input signal fluctuation.
At last, the structure of this paper is as follows. In Sect. 2, we provide the analytic expressions of both the first-order and the second-order moment of output signal amplitude. Furthermore, we obtain the analytic expression of the SNR. In Sect. 3, we propose the numerical simulations based on analytic expressions. At last, some discussions conclude this paper in Sect. 4.
2 System model
2.1 The expression of the first-order moment
We consider the generalized Langevin equation with Gaussian white noise as follows
where X(t) is the oscillator displacement, \(\omega \) is the frequency constant of the system, and \(A_0\) and \(\Omega \) are the amplitude and the frequency of the periodic cosine wave input signal, respectively. \(\xi _t\) and \(\eta _t\) are Gaussian white noise, satisfying
where \(D_1\) and \(D_2\) are the variances of the \(\xi _t\) and \(\eta _t\), respectively. And we can learn from the theory of stochastic differential equation (SDE) [11] that \(\mathop {}\!\mathrm {d}G_t\), which is the differentiation of a Brownian motion \(G_t\), can be written as
where \(\gamma _t\) is Gaussian white noise. Thus, we can rewrite Eq. (1) as follows
where \(B_t\) and \(W_t\) are Brownian motions satisfying Eq. (3). In particular, \(\mathop {}\!\mathrm {d}B_t=\xi _t\cdot \mathop {}\!\mathrm {d}t\) and \(\mathop {}\!\mathrm {d}W_t=\eta _t\cdot \mathop {}\!\mathrm {d}t\). Then, we simply multiply both sides of Eq. (4) by \(e^{\omega ^2t}\) to obtain
and the integration of both sides of the above equation is as follows,
In fact, since \(\omega ^2 > 0\), the initial displacement has little effect on the stable displacement of the system, as time t grows. Therefore, we obtain the following equation, assuming that \(X_0=0\),
and then, take average of Eq. (7), and we acquire
where \(A_1/A_0=\frac{1}{\sqrt{\omega ^4+\Omega ^2}}\) and \(tan\phi _0 =\Omega /\omega ^2\). And the stationary solution \(\langle X_t \rangle _{as}\) satisfies
From Eq. (9), we find that the amplitude of the response is monotone with both \(\Omega \) and \(\omega \). Thus, we deduce that there is no SR phenomenon in the first-order moment of the response, which is one of our main results in this paper.
2.2 The expression of the second-order moment
Assume there exists a function \(f(t,x_t)=x_t^2\), and obviously \(f(t,x_t)\) is twice continuously differentiable in \(x_t\) which is an itô process and once continuously differentiable in time t. Then by itô formula [12], we have
and
Thus, it can be obtained by Eqs. (4) and (11) that
Inserting Eqs. (4) and (12) into Eq. (10) by substituting \(\mathop {}\!\mathrm {d}x_t\) with \(\mathop {}\!\mathrm {d}X_t\), and \(\mathop {}\!\mathrm {d}x_t \cdot \mathop {}\!\mathrm {d}x_t\) with \(\mathop {}\!\mathrm {d}X_t \cdot \mathop {}\!\mathrm {d}X_t\), respectively, Eq. (10) can be rewritten as
After taking average of the above equation, we have
Since \(\langle X_t^2 \rangle \) and \(\langle X_t \rangle \) are functions of t, then we can take the differential of Eq. (14) by t and acquire
The solution of Eq. (15) is convergent if and only if \(2\omega ^2>D_1^2\). In the long-time limit(\(t \rightarrow +\infty \)), we then obtain the expression of the stationary second-order moment
where
Additionally, Eq. (15) shows that the system is stable if and only if
2.3 SNR
The influence of the external signal on the system reflects on SNR. Then, the effect of frequency and input signal fluctuation is going to be considered. It is crucial that correlation function should be calculated, in order to obtain the analytic expression of SNR. In Eq. (7), replace t by \(t+\tau (\tau \ge 0)\); we obtain the time-delay model of Eq. (7)
and take average of Eq. (19) to obtain
On the other hand, let \(E[X\mid {\mathcal {F}}]\) represent the conditional expectation of random variable X with a given \(\sigma \)-algebra \({\mathcal {F}}\), then
where \({\mathcal {F}}_t=\{e^{\omega ^2s}X_s,s\le t\}\) is a \(\sigma \)-algebra [11], and since
is a martingale [11],
Divide both sides of Eq. (23) by \(e^{\omega ^2(2t+\tau )}\)
Therefore, we derive the correlation function from Eq. (24)
On the other hand, when \(\tau <0\), we can easily obtain
Thus, for any \(\tau \) we have
The power spectrum \(S(\omega _0)\) is calculated as the Fourier transform of the correlation function. Then in order to calculate the output SNR we break up \(S(\omega _0)\) into two parts:
where
and
Finally, the expression of the SNR is derived
where the parameters in Eq. (31) are introduced above.
3 Simulation
In order to verify the expression of the first-order moment in Eq. (9) and the second-order moment in Eq. (16), we use numerical simulation to approximate the system model Eq. (1) and compare the simulation results with the analytic results. The existence of noise makes the output of the system unpredictable, and the amplitude of the response is a random variable. Thus, the Monte Carlo method is used under the same parameter conditions taking simulation times \(N=200\), simulation time \(t=30s\) and time interval \(\Delta t=1e-3s\). The average value of simulation times N is taken as the steady-state response of the system.

When fixing parameters to \(\Omega =0.8, D_1=1.1, D_2=0.9, \omega =1\), a the relationship between first-order moment analytic solution and numerical solution, and b errors between first-order moment analytic solution and numerical solution

When fixing parameters to \(\Omega =0.8, D_1=1.1, D_2=0.9, \omega =1\), a the relationship between second-order moment analytic solution and numerical solution, and b errors between first-order moment analytic solution and numerical solution
When we do simulations on the numerical solution, we set the initial value to zero regardless of the initial value of the analytic solution. The first-order moment analytic solution and the numerical solution of Eq. (1) are shown in Fig. 1, which shows that the numerical first-order moment solution is statistically consistent to the analytic solution meaning that the initial value does not affect our analysis of the results. Thus, it is certain that the first-order moment of the analytic expression is reliable.

When fixing parameters to \(\Omega =0.8, D_2=0.9, \omega =1\), a the region of stability of the system versus \(D_1\) and \(\omega \), and b the numerical solution of the second-order moment with \(D_1=2\)

The amplitude versus \(\omega \) while fixing, a \(\Omega = 0.8\) and \(D_1=0.5\); b \(\Omega =0.8\) and \(D_2=0.9\). Specifically, the green points in both a and b are the lower bounds of \(\omega \) with different \(D_1\) satisfying Eq. (18)
Similarly, the initial value of second-order moment of numerical solution is also set to zero. Then, we can learn from Fig. 2 that the numerical solution of the second-order moment expression is statistically consistent to the analytic one. Thus, we can say that the second-order moment of the analytic expression is reliable.
According to Eq. (18), we obtain the stable region of the system in Fig. 3a. Take \(D_1=2\) and Fig. 3b shows that the output is unstable. And comparing to Fig. 2a in which the parameters are identical to Fig.3a except that \(D_1=1.1\), we verify the condition of stability of the system.
However, it is difficult for us to tell if there is any SR phenomenon directly in Eq. (16). Thus, we figure out the parameters which influence the amplitude through simulation. For some \(D_1\) and \(\omega \) satisfying Eq. (18), the peak appears. In particular, in Fig. 4, the green points are lower bounds of \(\omega \) satisfying \(D_1^2=2\omega ^2\). In other words, the figure is valid when \(\omega \) is over the lower bound.

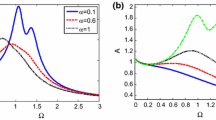
The amplitude versus \(D_2\) while fixing, a \(\Omega =0.8\) and \(\omega =0.9\); b \(\Omega =0.8\) and \(D_1=1.1\)

When fixing parameters to \(D_1=1.1, \Omega =0.8\), a the SNR versus \(\omega \) and \(D_2\); b the projection of a to \(\omega \)-SNR plane
From Eqs. (9) and (16), we obtain the first-order and second-order moment response of the system model Eq. (1). Equation (9) shows that the expression of amplitude is monotone with \(\Omega \) and \(\omega \), resulting in the lack of SR phenomenon in the first-order moment expression of the response. On the other hand, from Figs. 4 and 5, we obtain both SR and ISR phenomenon.
From Eq. (31), we obtain the analytical expression of SNR. In Fig. 6, we investigate that SNR versus both \(\omega \) and \(D_2\) has a peak, while \(\Omega \) and \(D_1\) are fixed. In other words, as \(D_2\) or \(\omega \) increase, the SNR rises at first and then falls. Since the system is under the synergy between each parameter, the noise does not only restrain the system, but enhances the system under some conditions.
4 Conclusion
In this paper, we investigate the phenomenon of stochastic resonance(SR), inverse stochastic resonance(ISR) and signal-to-noise ratio (SNR) in generalized Langevin equation (GLE) subjected to a multiplicative Gaussian white noise in both frequency and input signal fluctuation. We obtain the analytic response, which is in both the first- and second-order moment of the system. Then, we verify the analytic responses by comparison with the numerical stationary ones. Then, we find that SR phenomenon does not exist in the first-order moment response in theory, while there are both SR and ISR phenomenon existing in the second-order moment response. Specifically, the output amplitude versus \(\omega \) presents one-peak oscillation. Since \(D_1\) has strong relationships with \(\omega \), when fixing \(\omega \), the amplitude versus \(D_1\) also presents one-peak oscillation. On the other hand, while fixing \(D_1\) and \(\omega \), the parameter \(D_2\) causes one-valley in the amplitude. Finally, in Fig. 6 we investigate the graphic of SNR versus \(\omega \) and \(D_2\) with fixed \(D_1=1.1\) and \(\Omega =0.8\).
In summary, by adjusting the parameters properly, we can control SR and ISR of the system. Additionally, we expect that the model of Gaussian white noise in both frequency and input signal fluctuation will find ways to fit in applications of modern science.
Data Availability
The data used to support the findings of this study are included within the article.
References
Xu, J., Zhou, W., Jing, J.: An electromagnetic torsion active vibration absorber based on the fxlms algorithm. J. Sound Vib. 524, 116734 (2022)
Hu, J., Wan, D., Hu, Y., Wang, H., Jiang, Y., Xue, Y., Li, L.: A hysteretic loop phenomenon at strain amplitude dependent damping curves of pre-strained pure mg during cyclic vibration. J. Alloy. Compd. 886, 161303 (2021)
Yang, X., Ding, K., He, G.: Phenomenon-model-based am-fm vibration mechanism of faulty spur gear. Mech. Syst. Signal Process. 134, 106366 (2019)
Landau, L., Lifshitz, E., Sykes, J., Bell, J.: Mechanics: Volume 1, Course of Theoretical Physics. Elsevier (1976)
Gang, H.: Stochastic Forces and Nonlinear Systems. Shanghai Scientific and Technological Education Press (1994)
Bao, J.: Random simulation method of classical and quantum dissipation system (2009)
Gao, S., Gao, N., Kan, B., Wang, H.: Stochastic resonance in coupled star-networks with power-law heterogeneity. Physica A 580, 126155 (2021)
Ren, R., Deng, K.: Noise and periodic signal induced stochastic resonance in a langevin equation with random mass and frequency. Physica A 523, 145–155 (2019)
Guo, F., Yuan Wang, X., Wei Qin, M., Dong Luo, X., Wei Wang, J.: Resonance phenomenon for a nonlinear system with fractional derivative subject to multiplicative and additive noise. Physica A 562, 125243 (2021)
Zhong, S., Zhang, L.: Noise effect on the signal transmission in an underdamped fractional coupled system. Nonlinear Dyn. 102, 2077–2102 (2020)
Øksendal, B.: Stochastic Differential Equations, 6th edn. Springer, Berlin (2003)
Itô, K.: On a formula concerning stochastic differentials. Nagoya Math. J. 3, 55–65 (1951)
Benzi, R., Sutera, A., Vulpiani, A.: The mechanism of stochastic resonance. J. Phys. A: Math. Gen. 14(11), L453–L457 (1981)
Gitterman, M.: Classical harmonic oscillator with multiplicative noise. Physica A 352(2), 309–334 (2005)
Rodrigo, G., Stocks, N.G.: Suprathreshold stochastic resonance behind cancer. Trends Biochem. Sci. 43(7), 483–485 (2018)
Bene, L., Bagdány, M., Damjanovich, L.: Adaptive threshold-stochastic resonance (at-sr) in mhc clusters on the cell surface. Immunol. Lett. 217, 65–71 (2020)
Yamakou, M.E., Tran, T.D.: Lévy noise-induced self-induced stochastic resonance in a memristive neuron. Nonlinear Dyn. 107(3), 2847–2865 (2022)
Zhu, Q.H., Shen, J.W., Ji, J.C.: Internal signal stochastic resonance of a two-component gene regulatory network under lévy noise. Nonlinear Dyn. 100(1), 863–876 (2020)
Zhang, G., Shu, Y., Zhang, T.: Piecewise unsaturated multi-stable stochastic resonance under trichotomous noise and its application in bearing fault diagnosis. Results Phys. 30, 104907 (2021)
Jiao, S., Gao, R., Zhang, D., Wang, C.: A novel method for uwb weak signal detection based on stochastic resonance and wavelet transform. Chin. J. Phys. 76, 79–93 (2022)
Zhong, W.-R., Shao, Y.-Z., He, Z.-H.: Pure multiplicative stochastic resonance of a theoretical anti-tumor model with seasonal modulability. Phys. Rev. E 73, 060902 (2006)
Shi, P., Li, M., Zhang, W., Han, D.: Weak signal enhancement for machinery fault diagnosis based on a novel adaptive multi-parameter unsaturated stochastic resonance. Appl. Acoust. 189, 108609 (2022)
Zhou, Z., Yu, W., Wang, J., Liu, M.: A high dimensional stochastic resonance system and its application in signal processing. Chaos Solitons Fract. 154, 111642 (2022)
Djurhuus, T., Krozer, V.: Numerical analysis of stochastic resonance in a bistable circuit. Int. J. Circuit Theory Appl. 45(5), 625–635 (2017)
Lin, L., Wang, H., Ma, H.: Directed transport properties of double-headed molecular motors with balanced cargo. Physica A 517, 270–279 (2019)
Peng, L., Lin-Ru, N., Qi-Rui, H., Xing-Xiu, S.: Effect of inertia mass on the stochastic resonance driven by a multiplicative dichotomous noise. Chin. Phys. B 21, 050503 (2012)
Torres, J.J., Uzuntarla, M., Marro, J.: A theoretical description of inverse stochastic resonance in nature. Commun. Nonlinear Sci. Numer. Simul. 80, 104975 (2020)
Lu, L., Jia, Y., Ge, M., Xu, Y., Li, A.: Inverse stochastic resonance in hodgkin-huxley neural system driven by gaussian and non-gaussian colored noises. Nonlinear Dyn. 100(1), 877–889 (2020)
Zhang, L.-Y., Jin, G.-X., Cao, L., Wang, Z.-Y.: Stochastic resonance of a damped oscillator with frequency fluctuation driven by a periodic external force. Chin. Phys. B 21(12), 120502 (2012)
Cao, L., Wu, D.J.: Stochastic resonance in a linear system with signal-modulated noise. Europhys. Lett. (EPL) 61(5), 593–598 (2003)
Acknowledgements
This work is supported by the National Science Foundation of China (Grant No. 12102369) and National Key R &D Program of China (Grant No. 2020YFA0714000).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that there is no conflict of interests regarding the publication of this paper.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Ma, C., Ren, R., Luo, M. et al. Stochastic resonance in an overdamped oscillator with frequency and input signal fluctuation. Nonlinear Dyn 110, 1223–1232 (2022). https://doi.org/10.1007/s11071-022-07715-w
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-022-07715-w