
Abstract
This paper studies the consensus of leader-following multiagent systems with nonlinear dynamics. Consider that control protocols for the consensus work under an intermittent framework due to inevitable factors; meanwhile, the event-triggered mechanism is introduced, so as to reduce the update frequency of the control protocols. In particular, threshold parameters in the event-triggered conditions are supposed to be dynamically changed, and the minimum event-triggered intervals are set to be positive in advance. Furthermore, according to whether event-triggered conditions depend on combined measurements or a single measurement, two forms of event-triggered schemes are designed; then, the corresponding distributed control protocols are demonstrated. Based on the graph theory and Lyapunov function method, sufficient conditions and a concrete algorithm for the consensus of multiagent systems are presented. It is shown that the intermittent dynamic event-triggered protocols given in this paper can effectively reduce the update frequency of control and exclude Zeno behavior. Finally, detailed numerical examples are supplied to illustrate the proposed results.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
A multiagent system is composed of multiple interacting agents, which can complete specific tasks through information exchange and cooperation among the agents. There are many real systems that can be modeled as multiagent systems, such as clustered animals, sensor networks, smart power grids, and so on. During the past decades, the cooperative control problem of multiagent systems has been widely addressed [1,2,3,4], wherein the consensus is regarded as an important issue [5, 6]. In general, the consensus of multiagent systems implies that all the agents can reach a common value by adopting appropriate control protocols. Multiagent systems in the study of consensus can be divided into two main types, that is, leader-following systems and leaderless systems [7,8,9,10]. Particularly, a leader-following system includes multiple followers and one leader, then all the followers converge to the trajectory of the leader if the consensus is realized, in other words, the state of the leader can be used as the target of control. Therefore, in the leader-following consensus, all the agents can achieve a prescribed behavior, which can be applied to the tracking problem.
In order to achieve the consensus of multiagent systems, a number of cooperative control strategies have been reported in the existing results, such as adaptive control [11], output feedback control [12], optimal control [13], and so on. It is worth mentioning that the controller applied to an agent mainly depends on the information from its neighboring agents via communication links. However, because of the existence of inevitable factors including cyber-attacks and the transmission distance greater than the effective sensing range, it is unrealistic for an agent to sense the information all the time. On the other hand, control protocols may be disabled due to the sensor or actuator failures. Accordingly, an intermittent framework is more practical compared with a continuous one. In the intermittent scheme, protocols are required to work for a period of time, then rest or recover from failures for the next interval, which can also extend the service life of the control equipment. So far, the intermittent control protocols have been adopted for the consensus. For example, by utilizing the intermittent pinning control, synchronization of nonlinear coupled networks was discussed [14]. The consensus of multiagent systems in a heterogeneous coupling network was realized through intermittent scheme [15]. In [16], an intermittent pinning strategy on time scales was put forward, and in [17], the consensus of second-order multiagent systems with intermittent approach was investigated.
In addition to the intermittent framework described above, many current works are concerned with economic and effective ways for designing control laws, such as impulsive control, sampled-data control, and so on [18, 19]. In recent years, it has been shown that the update frequency of control can be reduced by adopting event-triggered mechanism [20], since the instants for updating are discrete rather than continuous. Compared with the sampled-data control employing the time-triggered approach, in the event-triggered strategy, those instants are decided by the given specific conditions, then update intervals are not fixed and unnecessary updates can be avoided. To be specific, in the time-triggered mechanism, updates of control depend on the time device, therefore, at each new sampling instant, even if the received information changes a little, the control still needs to be updated. Until now, event-triggered schemes have been used for the consensus of multiagent systems. The consensus in switching networks via event-triggered control was investigated [21], the consensus of stochastic multiagent systems with event-triggered strategy was proposed [22], and a fully distributed event-triggered method for the consensus was developed [23].
It should be noted that the event-triggered mechanism may cause Zeno phenomenon, which implies that the controlled system will be instable owning to the existence of infinite switches in finite time. Therefore, Zeno behavior should be excluded in practical control protocols with the triggering mechanism, that is, event-triggered intervals need to be strictly positive. Some related results demonstrated the design of event-triggered conditions for avoiding Zeno behavior [24,25,26,27]. In particular, in the literature [25,26,27], the minimum triggering interval is set to be positive in advance. In addition, from the perspective of reducing the update frequency of control, the event-triggered conditions that can bring about larger triggering intervals are more effective. Recently, dynamic event-triggered schemes have been put forward and discussed [28,29,30,31,32,33]. It is found that if the threshold parameters in triggering conditions are supposed to be dynamic, the update frequency can be further reduced. By introducing a dynamic variable, a new class of dynamic event-triggered mechanism was presented [28]. In [29, 30], the consensus of linear multiagent systems under dynamic strategies was investigated, and the control problem of switched systems under dynamic event-triggered method was addressed [31, 32].
Based on the above discussion, the design of practical and effective control protocols for the consensus deserves further investigation. In this work, we put forward intermittent dynamic event-triggered control protocols, and the main contributions can be summarized as follows.
-
1.
This paper proposes intermittent dynamic event-triggered schemes for the consensus of multiagent systems. To the authors’ knowledge, there exist few results of the event-triggered mechanism that is both dynamic and works in the intermittent framework. On the one hand, the cost of updating the control can be saved in the dynamic strategies. On the other hand, compared with the available results on the dynamic event-triggered mechanism, such as [29, 30], the protocols in this paper can work well for multiagent systems subject to cyber-attacks or actuator failures. Moreover, under the intermittent framework, the life of the control devices can be prolonged.
-
2.
As is well known, Zeno behavior should be excluded in the event-triggered control protocols, therefore, the minimum triggering interval is set to be positive in advance for excluding Zeno behavior, which is partially motivated by the current results involving Zeno-free method [26, 27]. However, it should be noted that this paper focuses on the dynamic triggered mechanism and multiagent systems with nonlinear dynamics [34, 35], then, how to design the minimum interval is challenging and innovative.
-
3.
Two forms of event-triggered conditions are given in the paper, where combined measurements and a single measurement are utilized, respectively, furthermore, the characteristics of these two schemes are compared and illustrated. In addition, in comparison with our previous work [36], the event-triggered protocols in this paper are more advanced, since the protocols are dynamic and Zeno-free, and the leader in the multiagent system is not required to be static.
Organization In Sect. 2, multiagent systems are modeled, and intermittent dynamic event-triggered control protocols for the consensus are formulated. In Sect. 3, two types of dynamic event-triggered schemes are put forward. Section 4 shows detailed numerical examples. Finally, Sect. 5 gives concluding remarks.
Notations Let \(\mathbb {R}^m\) be the m-dimensional Euclidean space. \(\Vert \cdot \Vert \) denotes the Euclidean norm of a vector or the spectral norm of a matrix, and \(|\cdot |\) indicates the length of an interval. \(\otimes \) denotes the Kronecker product. \(\bigcup \), \(\bigcap \), and \(\backslash \) represent the union, intersection, and relative complement in set operations, respectively. \({\mathrm{diag}}\{\cdots \}\) indicates a diagonal matrix. \(P>0\) means that the symmetric matrix P is positive definite. \(I_{m}\) is supposed to be m-dimensional identity matrix.
2 Problem formulation and preliminaries
2.1 Multiagent systems and graph theory
Consider that a leader-following multiagent system is composed of N followers and one leader labeled by 0, and each agent has nonlinear dynamics, which is described as
where \(x_{i}(t)\in \mathbb {R}^m\) is the state of the ith follower, and \(x_{0}(t)\in \mathbb {R}^m\) is the state of the leader. \(f(t,\cdot )\in \mathbb {R}^m\) denotes the nonlinear dynamics. \(u_{i}(t)\in \mathbb {R}^m\) indicates the control protocol applied to the ith follower, which mainly utilizes the information from neighboring followers and the leader. Obviously, the leader is an isolated agent. It should be noted that the nonlinear dynamics is supposed to be the same for all the agents, which is similar to the existing related results, such as in the literature [37, 38].
Generally, the protocol \(u_{i}(t)\) is given as (2) if it works under a continuous framework:
where \(c>0\) represents the coupling strength, \(\mathcal {N}_{i}\) denotes the set of the neighbors for the ith follower. \(a_{ij}\ge 0\) and \(b_{i}\ge 0\) represent the weights of the information from the jth follower and the leader, respectively. Moreover, it is usually supposed that \(b_{i}=0\) for most of the followers, which means that just a fraction of the followers are pinned by the leader.
The communication topology of a multiagent system can be represented as a graph. Take the N followers in (1) for illustration, the graph is described as \(\mathcal {G}=(\mathcal {W},\mathcal {E},A)\), where \(\mathcal {W}\) is the set of the N followers or nodes, and \(\mathcal {E}\) is the set of communication channels or edges. \(A=(a_{ij})_{N\times N}\) is called the adjacency matrix. If there is an edge from the jth agent to the ith agent, then \(a_{ij}>0\), otherwise, \(a_{ij}=0\). Furthermore, \(a_{ij}>0\) implies that the information from the jth agent affects the state \(x_{i}(t)\) through the protocol \(u_{i}(t)\), therefore, the jth agent can be regarded as a neighbor for the ith agent. Besides the matrix A, the Laplacian matrix L is an important element for the graph, which is defined as \(L=(l_{ij})_{N\times N}\) with \(l_{ii}=\sum _{j=1}^{N}a_{ij}\) and \(l_{ij}=-a_{ij}\) (\(i\ne j\)). In addition, a directed path for two nodes in a graph refers to a sequence of ordered edges between them. A graph is called to have a spanning tree if there is a node owning directed paths to any other node, and this node can be taken as the root of the graph.
2.2 Consensus and event-triggered protocols
First, the definition of consensus for the multiagent system (1) is presented as follows.
Definition 1
The multiagent system (1) is called to realize consensus if, for any given initial conditions \(x_{i}(0)\) (\(i=1,2,\ldots ,N\)), \(\lim _{t\rightarrow \infty }\Vert x_{i}(t)-x_{0}(t)\Vert =0\) holds.
Remark 1
It is obvious that the states of the followers converge to that of the leader if the consensus is realized, then the leader-following consensus can be regarded as the tracking problem [15].
The main objective of this work is to design appropriate and effective protocols \(u_{i}(t)\) for the consensus of the system (1). However, it is difficult to require the protocol to be continuous as (2) due to cyber-attacks, actuator failures, and so on. Accordingly, intermittent strategies may be more practical. Suppose that the initial time is \(t_{0}\), and the protocol fails during the intervals \([T_{k},T_{k}+\tau _{k})\) (\(k=1,2,\ldots \)). Without loss of generality, assume \(\tau _{k}\ge \tau _{0}>0\) and \(T_{k+1}>T_{k}+\tau _{k}\). Figure 1 presents the time intervals for the intermittent protocol. Moreover, let \(\Delta ^f(t_{0},t_{1})\) be the set of all intervals that the protocol \(u_{i}(t)\) fails in the period \([t_{0},t_{1}]\), then \(\Delta ^f(t_{0},t_{1})\) is described as \(\Delta ^{f}(t_{0},t_{1})=\bigcup _{k=1,2,\ldots }[T_{k},T_{k}+\tau _{k}) \bigcap [t_{0},t_{1}]\). Instead, \(\Delta ^{w}(t_{0},t_{1})=[t_{0},t_{1}]\backslash \Delta ^f(t_{0},t_{1})\) denotes the set of all intervals that the protocol works.

Illustration for intermittent control protocols
On the other hand, as described in Sect. 1, so as to reduce the update frequency of control, the event-triggered scheme is utilized for the protocol, then the control protocol \(u_{i}(t)\) is given as
where \(i=1,2,\ldots ,N\). \(\hat{x}_{i}(t)\) and \(\hat{x}_{j}(t)\) denote the states of the ith and jth agents at certain event-triggered instants, respectively, which will be discussed later. Obviously, the event-triggered instants will decide the updating of the control.
Suppose that event-triggered instants of the ith agent are \(t_{1}^i,t_{2}^i,\ldots \) with \(t_{1}^i=t_{0}\), furthermore, since we focus on the intermittent protocols, the event-triggered mechanism is assumed to only work during \(\Delta ^{w}(t_{0},t_{1})\). Additionally, in order to avoid Zeno behavior, which can induce the instability of the controlled system, Zeno-free mechanism is utilized, that is, assume that the current triggering instant is \(t_{q}^i\), then the next triggering instant \(t_{q+1}^i\) satisfies
where \(\varepsilon _{i}>0\), and \(\delta _{q}^i\) is obtained through the following dynamic event-triggered condition:
for \(i=1,2,\ldots ,N\), \(q=1,2,\ldots \), \(g_{i}(t)\) is a specific function relying on the information from the neighboring agents, and the form of \(g_{i}(t)\) will be presented in Sect. 3. Moreover, the threshold parameter \(\eta _{i}(t)\) is dynamic with a law as
where \(\alpha _{i}\) is a positive constant, and \(\eta _{i}(t_{0})>0\).
Remark 2
Zeno behavior means that there exist infinite switches in finite time, accordingly, strictly positive event-triggered intervals \(t_{q+1}^i-t_{q}^i\) can guarantee the exclusion of Zeno behavior. Therefore, motivated by the results in [26, 27], this paper adopts Zeno-free mechanism, that is, \(t_{q+1}^i-t_{q}^i\ge \varepsilon _{i}>0\), and the selection of parameters \(\varepsilon _{i}\) will be given later. Recently, a different method for designing the parameter \(\eta _{i}(t)\) was presented [30], which may play a better role in adjusting \(\eta _{i}(t)\). However, since the intermittent framework is introduced in this work, the condition (6) is more suitable.
It should be noted that \(t_{q+1}^i\) may locate in \(\Delta ^{f}(t_{0},t_{1})\) when \(t_{q+1}^i=t_{q}^i+\varepsilon _{i}\) and \(t_{q}^i+\varepsilon _{i}\in \Delta ^{f}(t_{0},t_{1})\). However, the information from the neighboring agents at \(t_{q+1}^i\) may be unavailable if \(t_{q+1}^i\in \Delta ^{f}(t_{0},t_{1})\) due to the intermittent scheme. Accordingly, \(t_{q+1}^i=t_{q}^i+\varepsilon _{i}\) is replaced with \(t_{q+1}^i=\min _{T_{k}+\tau _{k}\ge t_{q}^i+\varepsilon _{i}}\{T_{k}+\tau _{k}\}\) if \(t_{q}^i+\varepsilon _{i}\in \Delta ^{f}(t_{0},t_{1})\).
Remark 3
If \(\eta _{i}(t)\) in the condition (5) equals zero, then the condition changes into \(g_{i}(t)\ge 0\), which has been employed in the existing literature such as our previous work [36], and this case will be illustrated in Sect. 4. On the other hand, in order to further increase event-triggered intervals, dynamic event-triggered control with time regularization was proposed [39]. However, it is difficult to apply the time regularization technique to this work, since the event-triggered time sequences \(\{t_{1}^i,t_{2}^i,\ldots \}\) can be non-identical for different agents.
Obviously, \(\eta _{i}(t)>0\) can be guaranteed by the law (6) and \(\eta _{i}(t_{0})>0\). Specifically, as described in Fig. 1, if \(t\in [t_{0},T_{1})\), \(\eta _{i}(t)=\eta _{i}(t_{0})\exp \{-\alpha _{i}(t-t_{0})\}>0\), and if \(t\in [T_{1},T_{1}+\tau _{1})\), \(\eta _{i}(t)=\eta _{i}(T_{1})=\eta _{i}(t_{0})\exp \{-\alpha _{i}(T_{1}-t_{0})\}>0\), therefore, \(\eta _{i}(t)=\eta _{i}(t_{0})\exp \{-\alpha _{i}(t-\tau _{k}-\tau _{k-1}-\cdots -\tau _{1}-t_{0})\}>0\) when \(t\in [T_{k}+\tau _{k},T_{k+1})\), and \(\eta _{i}(t)=\eta _{i}(T_{k+1})>0\) for \(t\in [T_{k+1},T_{k+1}+\tau _{k+1})\). In conclusion, \(\eta _{i}(t)>0\) is verified. Moreover, the threshold parameter \(\eta _{i}(t)>0\) in the condition \(g_{i}(t)\ge \eta _{i}(t)\) brings about larger event-triggered intervals \(\delta _{q}^i\) compared with the case of \(\eta _{i}(t)\equiv 0\) (see Sect. 4 for more details). Consequently, the dynamic event-triggered mechanism can further reduce the number of control updates. It should be noted that the condition \(g_{i}(t)\ge \eta _{i}(t)\) is detected continuously when \(t\in \Delta ^{w}(t_{0},t_{1})\), while in some existing results, the corresponding condition can be detected discretely [20]. However, since the intermittent framework, dynamic parameter, and nonlinear dynamics are introduced in the model of this paper, it will be difficult to deal with the discrete event-triggered detector.

Block diagram of the controlled multiagent system
In short, as described in Fig. 2, the event-triggered detector and the controller work under the same intermittent framework, in other words, the failures of sensor and actuator are synchronous. Of course, the failures can be asynchronous, however, this problem is more complicated, which will be focused on in our future work. The control input \(u_{i}(t)\) is updated according to \(\hat{x}_{i}(t)\), and kept a constant through the zero-order hold (ZOH) until the new event is triggered. It should be noted that ZOH is usually employed in the event-triggered scheme [39], in addition, the first-order hold (FOH) is also utilized for the networked control systems [40].
2.3 Preliminaries
This subsection provides some essential definition, lemmas, and assumptions.
Definition 2
([41]) A nonsingular matrix H is called to be an M-matrix if each off-diagonal element is nonpositive, and all of its eigenvalues have positive real parts.
Lemma 1
([42]) For a graph \(\mathcal {G}=(\mathcal {W},\mathcal {E},A)\) containing N nodes, if there exists a leader node having a directed path to every other node in \(\mathcal {G}\), then the matrix \(L+B\) is an M matrix, where L is the Laplacian matrix of the graph \(\mathcal {G}\), and \(B={\mathrm{diag}}\{b_{1},b_{2},\ldots ,b_{N}\}\), \(b_{i}\) denotes the weight of the edge from the leader node to the ith node (\(i=1,2,\ldots ,N\)).
Lemma 2
([43]) If \(H\in \mathbb {R}^{N\times N}\) is an M-matrix, then there is a vector \((p_{1}, p_{2},\ldots ,p_{N})^T\in \mathbb {R}^N\) such that \(P H+H^TP>0\), where \(P={\mathrm{diag}}\{p_{1}, p_{2},\ldots ,p_{N}\}\) and \(p_{i}>0\). In addition, \(H^{-1}\) exists.
Lemma 3
([41]) For matrices \(\mathcal {U}_{1}\), \(\mathcal {U}_{2}\), \(\mathcal {V}_{1}\) and \(\mathcal {V}_{2}\) with appropriate dimensions, the Kronecker product \(\otimes \) satisfies:
-
(i)
\((\rho \mathcal {U}_{1})\otimes \mathcal {U}_{2}=\mathcal {U}_{1}\otimes (\rho \mathcal {U}_{2})=\rho (\mathcal {U}_{1}\otimes \mathcal {U}_{2})\), where \(\rho \) is a constant.
-
(ii)
\((\mathcal {U}_{1}+\mathcal {U}_{2})\otimes \mathcal {V}_{1}=\mathcal {U}_{1}\otimes \mathcal {V}_{1}+\mathcal {U}_{2}\otimes \mathcal {V}_{1}\).
-
(iii)
\((\mathcal {U}_{1}\otimes \mathcal {U}_{2})(\mathcal {V}_{1}\otimes \mathcal {V}_{2})=(\mathcal {U}_{1}\mathcal {V}_{1})\otimes (\mathcal {U}_{2}\mathcal {V}_{2})\).
-
(iv)
\((\mathcal {U}_{1}\otimes \mathcal {U}_{2})^{T}=\mathcal {U}_{1}^{T}\otimes \mathcal {U}_{2}^{T}\).
Assumption 1
There exists \(\gamma >0\) such that \( \Vert f(t,x_{i})-f(t,x_{j})\Vert \le \gamma \Vert x_{i}-x_{j}\Vert \) for all \(x_{i},\ x_{j}\in \mathbb {R}^m\).
Assumption 2
The leader node 0 in the graph \(\mathcal {G}\) has a directed path to every follower, where \(\mathcal {G}\) represents the topology of the multiagent system (1).
Assumption 3
There exist \(n_{0}\ge 0\) and \(T^{f}>1\) satisfying
for all \(t_{0}\ge 0\), and \(t_{1}> t_{0}\), where \(|\Delta ^{f}(t_{0},t_{1})|\) represents the length of time when the control protocol \(u_{i}(t)\) fails within \([t_{0},t_{1}]\).
Remark 4
The parameter \(T^{f}>1\) in Assumption 3 guarantees that the time without control protocols is less than \(t_{1}-t_{0}\). In addition, Assumption 3 has been utilized in current results on cyber-attacks [33, 44].
3 Main results
3.1 Protocol with combined measurements
This subsection presents the consensus under the intermittent dynamic event-triggered protocol with combined measurements. First, let \(\hat{x}_{i}(t)\), \(\hat{x}_{j}(t)\), and \(\hat{x}_{0}(t)\) in (3) be \(x_{i}(t_{q}^i)\), \(x_{j}(t_{q}^i)\), and \(x_{0}(t_{q}^i)\), respectively, where \(t_{q}^i\le t\) indicates the latest triggering instant of the ith agent. Accordingly, the protocol (3) for \(t\in \Delta ^{w}(t_{0},t_{1})\) is rewritten as
then the protocol \(u_{i}(t)\) is updated only at each discrete event-triggered instant \(t_{q}^i\) (\(q=1,2,\ldots \)) of the ith agent, which reduces the number of updates. According to the definition of the Laplacian matrix L, \(u_{i}(t)\) as (8) can be described as
Furthermore, \(t_{q}^i\) is decided by the event-triggered mechanism introduced in Sect. 2, where \(g_{i}(t)\) in (5) is defined as
where \(i=1,2,\ldots ,N\), \(\beta _{i}(t)=\sum _{j=1}^Nl_{ij}x_{j}(t)-b_{i}(x_{0}(t)-x_{i}(t))\), and \(\beta _{i}(t_{q}^i)=\sum _{j=1}^Nl_{ij}x_{j}(t_{q}^i)-b_{i} (x_{0}(t_{q}^i)-x_{i}(t_{q}^i))\). The parameter \(\sigma _{i}>0\). \(\beta _{i}(t_{q}^i)-\beta _{i}(t)\triangleq \vartheta _{i}(t)\) denotes combined measurement relying on the information from neighbors at the triggering instant \(t_{q}^i\) and the current time t.
Remark 5
Obviously, the condition \(g_{i}(t)\ge \eta _{i}(t)\) in (5) changes into \(\Vert \vartheta _{i}(t)\Vert ^2\ge \sigma _{i}\Vert \beta _{i}(t)\Vert ^2+\eta _{i}(t)\). Then, if \(\Vert \vartheta _{i}(t)\Vert ^2\ge \sigma _{i}\Vert \beta _{i}(t)\Vert ^2+\eta _{i}(t)\), an event is triggered.
Denote the consensus error to be \(e_{i}(t)=x_{i}(t)-x_{0}(t)\) (\(i=1,2,\ldots ,N\)), based on the multiagent system (1) and the control protocol (9), one has
Next, conditions guaranteeing the consensus are given in Theorem 1.
Theorem 1
The leader-following multiagent system (1) under the intermittent control protocol (9) with the dynamic event-triggered mechanism, i.e., described as (4)–(6) and (10), will realize the consensus if Assumptions 1–3 and the following conditions hold.
-
(i)
The coupling strength \(c>\frac{2\gamma \bar{p}}{2\kappa _{1}-\theta \bar{p}^2}\), where \(0<\theta <\frac{2\kappa _{1}}{\bar{p}^2}\), \(\bar{p}=\max \{p_{1},p_{2},\ldots ,p_{N}\}\), \(\kappa _{1}=\min _{i=1,2,\ldots ,N}\{\lambda _{i}(\frac{PH+H^TP}{2})\}\).
-
(ii)
The parameter \(\sigma _{i}\) in (10) satisfies \(0<\sigma _{i}\le \bar{\sigma }_{1}<\bar{\sigma }\) for \(i=1,2,\ldots ,N\), where \(\bar{\sigma }<\frac{2\theta c\kappa _{1}-2\theta \gamma \bar{p}-c\theta ^2\bar{p}^2}{c\kappa _{2}}\), and \(\kappa _{2}=\max _{i=1,2,\ldots ,N}\) \(\{\lambda _{i}(H^TH)\}\).
-
(iii)
The parameter \(\alpha _{i}\) in (6) satisfies \(\alpha _{i}>\frac{c}{2\theta }\) for \(i=1,2,\ldots ,N\).
-
(iv)
The parameter \(T^f\) in Assumption 3 satisfies \(T^f>\frac{\rho _{1}+\rho _{2}}{\rho _{1}}\), where \(\rho _{1}=-\max _{i=1,2,\ldots ,N}\{\frac{c}{2\theta }-\alpha _{i},\frac{2\gamma \bar{p}+c\theta \bar{p}^2-2c\kappa _{1}+\frac{c}{\theta }\bar{\sigma }\kappa _{2}}{\bar{p}}\}\), and \(\rho _{2}=2\gamma \).
-
(v)
The parameter \(\varepsilon _{i}\) in (4) satisfies \(0<\varepsilon _{i}\le \frac{1}{\varpi }\) \(\times \ln \left( \sqrt{\frac{\bar{\sigma }_{2}}{N}}+1\right) \), where \(\varpi =\gamma \Vert H\Vert \Vert H^{-1}\Vert +c\Vert H\Vert \times \sqrt{\bar{\sigma }_{2}N}+c\Vert H\Vert \), and \(\bar{\sigma }_{2}=\bar{\sigma }-\bar{\sigma }_{1}\).
Proof
According to Assumption 2 and Lemma 1, the matrix \(H=L+B\) is an M-matrix, where L is the Laplacian matrix and \(B={\mathrm{diag}}\{b_{1},b_{2},\ldots ,b_{N}\}\), then there is a matrix \(P={\mathrm{diag}}\{p_{1}, p_{2},\ldots ,p_{N}\}\) satisfying \(P H+H^TP>0\) due to Lemma 2. Therefore, select the Lyapunov function as
When \(t\in \Delta ^{w}(t_{0},t_{1})\), based on the error system (11), the law (6), and Assumption 1, one can get
moreover, for any \(\theta >0\),
and according to the event-triggered conditions (4), (5) and (10), we assume that
where \(\sigma _{i}\) in (10) satisfies \(\sigma _{i}\le \bar{\sigma }_{1}<\bar{\sigma }\). It is worth pointing out that \(\sum _{i=1}^N\vartheta _{i}^T(t)\vartheta _{i}(t)\le \sum _{i=1}^N(\bar{\sigma }\beta _{i}^T(t)\beta _{i}(t)+\eta _{i}(t))\) is employed, instead of \(\sum _{i=1}^N\vartheta _{i}^T(t)\vartheta _{i}(t)\le \sum _{i=1}^N\) \((\sigma _{i}\beta _{i}^T(t)\beta _{i}(t)+\eta _{i}(t))\), since the triggering mechanism is given as \(t_{q+1}^i=t_{q}^i+\max \{\delta _{q}^i,\varepsilon _{i}\}\) rather than \(t_{q+1}^i=t_{q}^i+\delta _{q}^i\) for avoiding Zeno behavior.
In addition, it can be verified that \(\beta _{i}(t)=\sum _{j=1}^Nh_{ij}\) \(\times e_{j}(t)\) with \(h_{ij}\) being the element of matrix H, therefore,
where \(e(t)=(e_{1}^T(t),e_{2}^T(t),\ldots ,e_{N}^T(t))^T\in \mathbb {R}^{Nm}\).
Based on (13)–(16), one can get
where \(\bar{p}=\max \{p_{1},p_{2},\ldots ,p_{N}\}\), and the parameter \(\kappa _{1}=\min _{i=1,2,\ldots ,N}\{\lambda _{i}(\frac{PH+H^TP}{2})\}\), which denotes the minimum eigenvalue of \(\frac{PH+H^TP}{2}\). Obviously, if the coupling strength \(c>\frac{2\gamma \bar{p}}{2\kappa _{1}-\theta \bar{p}^2}\), where \(0<\theta <\frac{2\kappa _{1}}{\bar{p}^2}\), i.e., the condition (i) in Theorem 1 is satisfied, \(\gamma \bar{p}+\frac{c}{2}\theta \bar{p}^2-c\kappa _{1}<0\) holds.
Furthermore, due to \(\sum _{i=1}^N\beta _{i}^T(t)\beta _{i}(t)\!=\!e^T(t)(H^TH\otimes I_{m})e(t)\), then
where \(\kappa _{2}=\max _{i=1,2,\ldots ,N}\{\lambda _{i}(H^TH)\}\). Therefore, if the conditions (ii) and (iii) in Theorem 1 are guaranteed, \(\gamma \bar{p}+\frac{c}{2}\theta \bar{p}^2-c\kappa _{1}+\frac{c}{2\theta }\bar{\sigma }\kappa _{2}<0\), and \(\frac{c}{2\theta }-\alpha _{i}<0\). Obviously, one has
where \(-\rho _{1}=\max _{i=1,2,\ldots ,N}\bigg \{\frac{2\gamma \bar{p}+c\theta \bar{p}^2-2c\kappa _{1}+\frac{c}{\theta }\bar{\sigma } \kappa _{2}}{\bar{p}},\frac{c}{2\theta }-\alpha _{i}\bigg \}<0\).
When \(t\in \Delta ^{f}(t_{0},t_{1})\), according to (11) and (6), one has
where \(\rho _{2}=2\gamma >0\).
Therefore, \(\dot{V}(t)\le -\rho _{1}V(t)\) holds when \(t\in \Delta ^{w}(t_{0},t_{1})\), while \(\dot{V}(t)\le \rho _{2}V(t)\) holds for \(t\in \Delta ^{f}(t_{0},t_{1})\), moreover, V(t) is a continuous function, then for any \(t\le t_{1}\),
where \(|\Delta ^{w}(t_{0},t_{1})|\) and \(|\Delta ^{f}(t_{0},t_{1})|\) indicate the length of time with or without control protocols, respectively. It is obvious that if \(-\rho _{1}|\Delta ^{w}(t_{0},t_{1})|+\rho _{2}|\Delta ^{f} (t_{0},t_{1})|<-\epsilon (t_{1}-t_{0})\) with \(\epsilon \) being a small positive constant, then \(\lim _{t\rightarrow \infty }V(t)=0\). On the other hand, \(-\rho _{1}|\Delta ^{w}(t_{0},t_{1})|+\rho _{2}|\Delta ^{f}(t_{0},t_{1}) |<-\epsilon (t_{1}-t_{0})\) is ensured by \(|\Delta ^{f}(t_{0},t_{1})|<\frac{\rho _{1}}{\rho _{1}+\rho _{2}}(t_{1}-t_{0})\) due to \(|\Delta ^{w}(t_{0},t_{1})|=t_{1}-t_{0}-|\Delta ^{f}(t_{0},t_{1})|\). Furthermore, if Assumption 3 is satisfied, then \(T^f>\frac{\rho _{1}+\rho _{2}}{\rho _{1}}\), i.e., the condition (iv) in Theorem 1, can ensure \(|\Delta ^{f}(t_{0},t_{1})|<\frac{\rho _{1}}{\rho _{1}+\rho _{2}}(t_{1}-t_{0})\).
On the other hand, \(\lim _{t\rightarrow \infty }V(t)=0\) implies that \(\lim _{t\rightarrow \infty }\Vert e_{i}(t)\Vert =0\) and \(\lim _{t\rightarrow \infty }\eta _{i}(t)=0\), moreover, \(\lim _{t\rightarrow \infty }\Vert e_{i}(t)\Vert =0\) means that \(\lim _{t\rightarrow \infty }\Vert x_{i}(t)-x_{0}(t)\Vert =0\), in other words, the consensus of the multiagent system (1) is realized.
It should be noted that \(\sum _{i=1}^N\vartheta _{i}^T(t)\vartheta _{i}(t)\le \sum _{i=1}^N\) \((\bar{\sigma }\beta _{i}^T(t)\beta _{i}(t)+\eta _{i}(t))\) as (15) plays an essential role. As described above, the event-triggered instant satisfies \(t_{q+1}^i=t_{q}^i+\max \{\delta _{q}^i,\varepsilon _{i}\}\), where \(\delta _{q}^i\) is defined as \(\delta _{q}^i=\inf _{t>t_{q}^i,t\in \Delta ^{w}(t_{0},t_{1})}\{t-t_{q}^i | \Vert \vartheta _{i}(t)\Vert ^2\ge \sigma _{i}\Vert \beta _{i}(t)\Vert ^2+\eta _{i}(t)\}\) based on (5) and (10). Accordingly, divide the N followers into two non-overlapping parts \(\Omega _{1}(t)\) and \(\Omega _{2}(t)\) at time t, which satisfy that \(t_{q+1}^i=t_{q}^i+\delta _{q}^i\) for \(i\in \Omega _{1}(t)\), and \(t_{q+1}^i=t_{q}^i+\varepsilon _{i}\) for \(i\in \Omega _{2}(t)\).
Moreover, for \(i\in \Omega _{1}(t)\), as soon as \(\Vert \vartheta _{i}(t)\Vert ^2\ge \sigma _{i}\) \(\times \Vert \beta _{i}(t)\Vert ^2+\eta _{i}(t)\) holds, a new event is triggered, then \(\vartheta _{i}(t)\) is set to be a zero vector, which implies that
due to \(\sigma _{i}\le \bar{\sigma }_{1}\). Then, if the following (23) holds for \(i\in \Omega _{2}(t)\), (15) can be guaranteed.
where \(\bar{\sigma }_{2}=\bar{\sigma }-\bar{\sigma }_{1}\). For each \(i\in \Omega _{2}(t)\), \(\Vert \vartheta _{i}(t)\Vert \le \sqrt{\frac{\bar{\sigma }_{2}}{N}}\Vert \beta (t)\Vert \) is a sufficient condition for (23), where \(\beta (t)=(\beta _{1}^T(t),\beta _{2}^T(t),\ldots ,\beta _{N}^T(t))^T\). Therefore, the parameter \(\varepsilon _{i}\) corresponds to the time interval from 0 to \(\sqrt{\frac{\bar{\sigma }_{2}}{N}}\) for \(\Vert \vartheta _{i}(t)\Vert /\Vert \beta (t)\Vert \). Analysis of the time interval is given as follows.
Due to \(\beta (t)=(H\otimes I_{m})e(t)\), based on Lemma 2, one gets \(e(t)=(H^{-1}\otimes I_{m})\beta (t)\), then from (11),
On the other hand,
where \(\Vert \dot{\vartheta }_{i}(t)\Vert =\Vert \dot{\beta }_{i}(t)\Vert \le \Vert \dot{\beta }(t)\Vert \). Owning to \(\Vert \vartheta _{i}(t)\Vert \le \sqrt{\frac{\bar{\sigma }_{2}}{N}}\Vert \beta (t)\Vert \) and (24), one can obtain
where \(\varpi =\gamma \Vert H\Vert \Vert H^{-1}\Vert +c\Vert H\Vert \sqrt{\bar{\sigma }_{2}N}+c\Vert H\Vert \). Consequently, \(\frac{\Vert \vartheta _{i}(t)\Vert }{\Vert \beta (t)\Vert }\) satisfies the bound of \(\frac{\Vert \vartheta _{i}(t)\Vert }{\Vert \beta (t)\Vert }\le \varphi (t)\), where \(\varphi (t)\) denotes the solution of \(\dot{\varphi }=\varpi (1+\varphi )\) with \(\varphi (0)=0\), then \(t=\frac{1}{\varpi }\ln \left( \sqrt{\frac{\bar{\sigma }_{2}}{N}}+1\right) \) is the value for \(\varphi (t)=\sqrt{\frac{\bar{\sigma }_{2}}{N}}\). Accordingly, if the parameter \(\varepsilon _{i}\) satisfies the condition (v) in Theorem 1, i.e., \(0<\varepsilon _{i}\le \frac{1}{\varpi }\ln \left( \sqrt{\frac{\bar{\sigma }_{2}}{N}}+1\right) \), then (23) holds, which means that (15) can be ensured. This completes the proof. \(\square \)
Remark 6
In the proof of Theorem 1, there are two main steps, one is stability analysis of the error system, and the other is selection of the time interval for excluding Zeno behavior. The conditions proposed in Theorem 1 include the coupling strength c in control protocol, the parameters \(\sigma _{i}\), \(\alpha _{i}\), and \(\varepsilon _{i}\) in dynamic event-triggered mechanism, and the requirement of \(T^f\) for intermittent framework.
In order to illustrate the protocols clearly, Algorithm 1 is provided.

3.2 Protocol with a single measurement
It should be noted that in the previous subsection, \(\vartheta _{i}(t)\) in the event-triggered condition is defined as \(\beta _{i}(t_{q}^i)-\beta _{i}(t)\), which is taken as combined measurements, and the control protocol \(u_{i}(t)\) is given as (9), consequently, at the triggering instant \(t_{q}^i\) of the ith agent, the states of all the agents should be available. This subsection presents another scheme, where the protocol is described as
where \(t_{q'}^j\le t\) and \(t_{q}^i\le t\) denote the latest event-triggered instant of the jth and ith agents, respectively. Moreover, the leader is supposed to satisfy \(f(t,x_{0}(t))=0\), that is, the state \(x_{0}\) is an equilibrium point. If the consensus is realized, then \(\lim _{t\rightarrow \infty }\Vert x_{i}(t)-x_{0}\Vert =0\) holds, which was also investigated in [45] by utilizing continuous feedback control.
Remark 7
Compared with (9), the control protocol \(u_{i}(t)\) as (27) requires the information \(x_{j}(t_{q'}^j)\) of the jth agent at the latest event-triggered instant \(t_{q'}^j\) rather than \(t_{q}^i\), where \(t_{q'}^j\) and \(t_{q}^i\) can be non-identical. Consequently, for the ith agent, \(u_{i}(t)\) will be updated at \(t_{q'}^j\) besides \(t_{q}^i\).
Furthermore, let \(\vartheta _{i}(t)=x_{i}(t_{q}^i)-x_{i}(t)\), which is a measurement depending on its own information for the ith agent, and the function \(g_{i}(t)\) is given as
where \(i=1,2,\ldots ,N\), \(\beta _{i}(t)\) is defined the same as in (10).
Similarly, denote the consensus error to be \(e_{i}(t)=x_{i}(t)-x_{0}\) (\(i=1,2,\ldots ,N\)), based on the multiagent system (1), the control protocol (27), and \(\vartheta _{i}(t)=x_{i}(t_{q}^i)-x_{i}(t)\), one has
It should be noted that if the leader is not supposed to be static, then the item \(cb_{i}(x_{0}-x_{i}(t_{q}^i))\) in Eq. (27) should be changed into \(cb_{i}(x_{0}(t_{q}^i)-x_{i}(t_{q}^i))\). Correspondingly, we cannot get the consensus error system (29). Therefore, the leader is supposed to be static. Conditions guaranteeing the consensus are given in Theorem 2, which is similar to Theorem 1.
Theorem 2
The leader-following multiagent system (1) under the intermittent control protocol (27) with the dynamic event-triggered mechanism, i.e., described as (4)–(6) and (28), will realize the consensus if Assumptions 1–3 and the following conditions hold.
-
(i)
The coupling strength \(c>\frac{2\gamma \bar{p}}{2\kappa _{1}-\theta \kappa _{3}}\), where \(0<\theta <\frac{2\kappa _{1}}{\kappa _{3}}\), \(\bar{p}=\max \{p_{1},p_{2},\ldots ,p_{N}\}\), \(\kappa _{1}=\min _{i=1,2,\ldots ,N}\) \(\{\lambda _{i}(\frac{PH+H^TP}{2})\}\), \(\kappa _{3}=\max _{i=1,2,\ldots ,N}\{\lambda _{i}(PHH^TP)\}\).
-
(ii)
The parameter \(\sigma _{i}\) in (28) satisfies \(0<\sigma _{i}\le \bar{\sigma }_{1}<\bar{\sigma }\) for \(i=1,2,\ldots ,N\), where \(\bar{\sigma }<\frac{2\theta c\kappa _{1}-2\theta \gamma \bar{p}-c\theta ^2\kappa _{3}}{c\kappa _{2}}\), and \(\kappa _{2}=\max _{i=1,2,\ldots ,N}\{\lambda _{i}(H^TH)\}\).
-
(iii)
The parameter \(\alpha _{i}\) in (6) satisfies \(\alpha _{i}>\frac{c}{2\theta }\) for \(i=1,2,\ldots ,N\).
-
(iv)
The parameter \(T^f\) in Assumption 3 satisfies \(T^f>\frac{\rho _{1}+\rho _{2}}{\rho _{1}}\), where \(\rho _{1}=-\max _{i=1,2,\ldots ,N}\{\frac{c}{2\theta }-\alpha _{i},\) \(\frac{2\gamma \bar{p}+c\theta \kappa _{3}-2c\kappa _{1}+\frac{c}{\theta }\bar{\sigma }\kappa _{2}}{\bar{p}}\}\), and \(\rho _{2}=2\gamma \).
-
(v)
The parameter \(\varepsilon _{i}\) in (4) satisfies \(0<\varepsilon _{i}\le \frac{1}{\varpi }\) \(\times \ln \left( \frac{1}{\Vert H^{-1}\Vert }\sqrt{\frac{\bar{\sigma }_{2}}{N}}+1\right) \), where \(\varpi =\gamma \Vert H\Vert \Vert H^{-1}\Vert +c\Vert H\Vert ^2\sqrt{\bar{\sigma }_{2}N}+c\Vert H\Vert \), and \(\bar{\sigma }_{2}=\bar{\sigma }-\bar{\sigma }_{1}\).
Proof
Choose the Lyapunov function the same as (12), when \(t\in \Delta ^{w}(t_{0},t_{1})\), based on the error system (29), one can get
moreover, for any \(\theta >0\),
where \(\vartheta (t)=(\vartheta _{1}^T(t),\vartheta _{2}^T(t),\ldots ,\vartheta _{N}^T(t))^T\), and the parameter \(\kappa _{3}=\max _{i=1,2,\ldots ,N}\{\lambda _{i}(PHH^TP)\}\). The following proof is similar to that of Theorem 1, then the conditions (i)–(iv) of Theorem 2 can be obtained.
Next, since \(\vartheta _{i}(t)\) is changed in the event-triggered mechanism, the parameter \(\varepsilon _{i}\) in (4) needs to be reselected. Based on (25) in Theorem 1, one can get that
still holds. Meanwhile, owning to \(\vartheta _{i}(t)=x_{i}(t_{q}^i)-x_{i}(t)\), one has \(\Vert \dot{\vartheta }_{i}(t)\Vert =\Vert \dot{x}_{i}(t)\Vert =\Vert \dot{e}_{i} (t)\Vert \le \Vert H^{-1}\Vert \Vert \beta (t)\Vert \), and
Then, we have
where \(\varpi =\gamma \Vert H\Vert \Vert H^{-1}\Vert +c\Vert H\Vert ^2\sqrt{\bar{\sigma }_{2}N}+c\Vert H\Vert \). Consequently, \(\frac{\Vert \vartheta _{i}(t)\Vert }{\Vert \beta (t)\Vert }\) satisfies the bound of \(\frac{\Vert \vartheta _{i}(t)\Vert }{\Vert \beta (t)\Vert }\le \varphi (t)\), where \(\varphi (t)\) denotes the solution of \(\dot{\varphi }=\varpi (\Vert H^{-1}\Vert +\varphi )\) with \(\varphi (0)=0\), then the value for \(\varphi (t)=\sqrt{\frac{\bar{\sigma }_{2}}{N}}\) is \(t=\frac{1}{\varpi }\ln \left( \frac{1}{\Vert H^{-1}\Vert }\sqrt{\frac{\bar{\sigma }_{2}}{N}}+1\right) \). Therefore, the parameter \(\varepsilon _{i}\) should satisfy the condition (v) in Theorem 2, i.e., \(0<\varepsilon _{i}\le \frac{1}{\varpi }\ln \left( \frac{1}{\Vert H^{-1}\Vert }\sqrt{\frac{\bar{\sigma }_{2}}{N}}+1\right) \). This completes the proof. \(\square \)
Remark 8
\(\vartheta _{i}(t)\) depends on the single measurement as \(x_{i}(t_{q}^i)-x_{i}(t)\), then it is not required to save the information \(x_{j}(t_{q}^i)\). However, the control protocol \(u_{i}(t)\) as (27) may be updated more frequently than that as (9). The corresponding algorithm can be obtained according to Algorithm 1, thus the detail is omitted here.
4 Numerical simulations
This section demonstrates specific numerical examples for illustrating the consensus of multiagent systems via intermittent dynamic event-triggered control protocols.
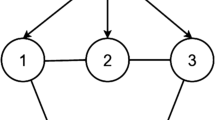
Consider that a multiagent system consists of five followers (\(N=5\)) and one leader, where the communication topology is shown in Fig. 3, obviously, the leader 0 has a directed path to every follower. Moreover, suppose that \(f(t,x_{i}(t))=0.05\sin (x_{i}(t))\), the weights of edges equal one and \(x_{i}(t)\in \mathbb {R}\) for simplicity, where \(i=0,1,\ldots ,5\).

The graph for communication topology of the multiagent system
According to Fig. 3, the matrix H is represented as \(H=\) \(\begin{pmatrix}1&{} 0&{} 0&{} 0&{} 0\\ -1&{} 1&{} 0&{} 0&{} 0\\ 0&{} 0&{} 1&{} 0&{} 0\\ 0&{} 0&{} -1&{} 1&{} 0\\ 0&{} 0&{} -1&{} 0&{} 1\end{pmatrix}\), then we have the matrix \(P=\mathrm {diag}\{0.5,0.25,0.75,0.25,0.25\}\) based on Lemma 2.
Example 1 First, the event-triggered mechanism is designed as (4)–(6) and (10), where \(\vartheta _{i}(t)=\beta _{i}(t_{q}^i)-\beta _{i}(t)\) denotes combined measurements. The control protocol \(u_{i}(t)\) is given as (9). Correspondingly, the parameters can be obtained through calculation, where \(\bar{p}=0.75\), \(\kappa _{1}=0.1938\), \(\kappa _{2}=3.7321\). Therefore, in order to satisfy the conditions (i)–(v) of Theorem 1, for \(i=1,2,\ldots ,5\), choose \(\theta =0.1\), the coupling strength \(c=0.5\) in the control protocol, \(\bar{\sigma }=0.004\) and \(\sigma _{i}=0.0035\) in the event-triggered condition, \(\alpha _{i}=2.6\) for \(\eta _{i}(t)\), \(T^f=5.7\) (\(\rho _{1}=0.0214\) and \(\rho _{2}=0.1\)) in Assumption 3 for intermittent framework, and \(\varepsilon _{i}=0.008\) (\(\varpi =1.2009\)) for Zeno-free scheme. Additionally, assume that \(t_{0}=0\), \(t_{1}=20\mathrm {s}\), the initial conditions \(x_{i}(0)\) are randomly generated, and \(\eta _{i}(0)=100\). By employing Algorithm 1, the numerical results are presented in Figs. 4, 5, and 6 and Table 1.

States \(x_{i}(t)\) of the agents in Example 1
In Fig. 4, the states of the followers and leader are provided. Obviously, the followers track the trajectory of the leader, which shows that the consensus is achieved based on Definition 1. Additionally, the time intervals without control protocol are also given, where the length of the time intervals \(|\Delta ^f(0,20)|=3.0191\), then Assumption 3 is satisfied.

Intermittent control protocols \(u_{i}(t)\) in Example 1
Figure 5 demonstrates the intermittent control protocols \(u_{i}(t)\), where \(u_{i}(t)=0\) during \(\Delta ^f(0,20)\). Furthermore, as the consensus realizes, all the protocols converge to zero. Particularly, the protocols are updated discretely owning to the event-triggered mechanism.

Event-triggered instants \(t_{q}^i\) in Example 1
In order to display the discrete instants when the protocols are updated, Fig. 6 supplies the event-triggered instants, i.e., \(t_{q}^i\) (\(q=1,2,\ldots ; i=1,2,\ldots ,5\)), which implies that the mechanism greatly reduces the number of the control updates. On the other hand, the event-triggered instants of different agents can be non-identical, and Zeno behavior is excluded due to the minimum time interval \(\varepsilon _{i}>0\).
Moreover, for the event-triggered times during \([0,20\mathrm {s})\), Table 1 provides a comparison between two cases, i.e., in the condition (5), \(\eta _{i}(t)\equiv 0\) and \(\eta _{i}(t)\) is updated with the law (6), which correspond to the static and dynamic event-triggered strategies, respectively. Clearly, the times in the dynamic strategy are much less than those in the static situation.
Example 2: Second, the event-triggered mechanism is designed as (4)–(6) and (28), where \(\vartheta _{i}(t)=x_{i}(t_{q}^i)-x_{i}(t)\) denotes a single measurement. The control protocol \(u_{i}(t)\) is given as (27). The parameters \(\bar{p}=0.75\), \(\kappa _{1}=0.1938\), \(\kappa _{2}=3.7321\), and \(\kappa _{3}=0.6998\), then if select \(c=0.5\), \(\bar{\sigma }=0.004\), \(\sigma _{i}=0.0035\), and \(\alpha _{i}=2.6\), which are the same as in Example 1, the conditions (i)–(iii) of Theorem 2 are also satisfied. Besides, the conditions (iv) and (v) can be guaranteed by \(T^f=9.2\) (\(\rho _{1}=0.0122\), \(\rho _{2}=0.1\)) and \(\varepsilon _{i}=0.004\) (\(\varpi =1.2459\)). The initial conditions \(x_{i}(0)\) except \(x_{0}(0)\) are randomly generated, while \(x_{0}(0)=2\pi \), and \(\eta _{i}(0)=100\). \(t_{0}=0\), and \(t_{1}=15\mathrm {s}\). The corresponding results for illustrating Theorem 2 are given in Figs. 7, 8, and 9 and Table 2. On the other hand, since the parameter \(T^f\) in this example is larger than that in Example 1, the length without control \(|\Delta ^f(0,15)|=0.9712\).

States \(x_{i}(t)\) of the agents in Example 2

Intermittent control protocols \(u_{i}(t)\) in Example 2
Figure 7 presents the states of the followers and leader, which implies that the consensus is realized. Compared with Fig. 4 in Example 1, the state of the leader in Fig. 7 is a constant for ensuring \(f(t,x_{0}(t))=0\). In Fig. 8, the control protocols as (27) are given, and it can be seen that the protocols are updated more frequently than those in Fig. 5, since for the ith agent, besides its own triggering instants \(t_{q}^i\), \(u_{i}(t)\) is updated at the triggering instants of its neighbors \(t_{q'}^j\), which is different from the protocols in Example 1.

Event-triggered instants \(t_{q}^i\) in Example 2
Figure 9 shows the event-triggered instants produced by the mechanism (4)–(6) and (28). Furthermore, as presented in Table 2, during \([0,15\mathrm {s})\), the event-triggered times of the agents with dynamic strategy are 86, 105, 74, 100, and 102, respectively, which implies that the dynamic event-triggered approach reduces the update frequency more effectively compared with the static scheme.
In the two examples above, for simplicity, the agents are assumed to move on the one-dimensional space, i.e., \(x_{i}(t)\in \mathbb {R}\). It should be noted that for the physical systems moving on higher-dimensional space, if the conditions in the theorems can be guaranteed, the designed control algorithm should also be applicable.
5 Conclusion and discussion
In order to realize the consensus of nonlinear multiagent systems, this paper has investigated how to improve control protocols. On the one hand, suppose that the protocols are intermittent. On the other hand, event-triggered scheme has been utilized and developed for reducing the update frequency of control. In particular, the event-triggered strategies under intermittent framework are not only dynamic but also Zeno-free. Two forms of the event-triggered protocols have been provided and discussed, where combined measurements and a single measurement have been adopted in the event-triggered conditions. Correspondingly, we put forward the sufficient conditions for the consensus via the proposed schemes, and designed the concrete algorithm. It can be found that the conditions are related to the coupling strength, parameters in the event-triggered mechanism, and the length of time without control. However, we focused on the fixed communication topology rather than switching topologies, since both the event-triggered mechanism and intermittent framework have been considered, then if the topologies are supposed to be switching, the exclusion of Zeno behavior needs further analysis. Furthermore, the consensus conditions depend on the communication topology, i.e., the matrix H. Therefore, only the fixed communication topology has been studied, and the case under switching topologies is a problem to be solved.
References
Liu, T., Huang, J.: Cooperative robust output regulation for a class of nonlinear multi-agent systems subject to a nonlinear leader system. Automatica 108, 108501 (2019)
Wu, J., Ugrinovskii, V., Allgöwer, F.: Cooperative estimation and robust synchronization of heterogeneous multiagent systems with coupled measurements. IEEE Trans. Control Netw. Syst. 5(4), 1597–1607 (2018)
Wang, W., Liang, H., Zhang, Y., Li, T.: Adaptive cooperative control for a class of nonlinear multi-agent systems with dead zone and input delay. Nonlinear Dyn. 96, 2707–2719 (2019)
Gao, W., Liu, Y., Odekunle, A., Yu, Y., Lu, P.: Adaptive dynamic programming and cooperative output regulation of discrete-time multi-agent systems. Int. J. Contr. Autom. Syst. 16, 2273–2281 (2018)
Wu, L., Park, J.H., Xie, X., Ren, Y., Yang, Z.: Distributed adaptive neural network consensus for a class of uncertain nonaffine nonlinear multi-agent systems. Nonlinear Dyn. 100, 1243–1255 (2020)
Zuo, Z., Defoort, M., Tian, B., Ding, Z.: Distributed consensus observer for multiagent systems with high-order integrator dynamics. IEEE Trans. Autom. Control 65(4), 1771–1778 (2020)
Xie, X., Mu, X.: Observer-based intermittent consensus control of nonlinear singular multi-agent systems. Int. J. Contr. Autom. Syst. 17, 2321–2330 (2019)
Zhao, H., Park, J.H.: Group consensus of discrete-time multi-agent systems with fixed and stochastic switching topologies. Nonlinear Dyn. 77, 1297–1307 (2014)
Ye, Y., Su, H.: Leader-following consensus of nonlinear fractional-order multi-agent systems over directed networks. Nonlinear Dyn. 96, 1391–1403 (2019)
Fu, J., Wen, G., Yu, W., Huang, T., Cao, J.: Exponential consensus of multiagent systems with Lipschitz nonlinearities using sampled-data information. IEEE Trans. Circuits Syst. I, Reg. Papers 65(12), 4363–4375 (2018)
Li, S., Ma, H.: Decentralized adaptive consensus control for discrete-time heterogeneous semiparametric multiagent systems. Int. J. Robust Nonlinear Control 29(11), 3756–3776 (2019)
Wu, T., Hu, J., Chen, D.: Non-fragile consensus control for nonlinear multi-agent systems with uniform quantizations and deception attacks via output feedback approach. Nonlinear Dyn. 96, 243–255 (2019)
Zhang, H., Yue, D., Zhao, W., Hu, S., Dou, C.: Distributed optimal consensus control for multiagent systems with input delay. IEEE Trans. Cybern. 48(6), 1747–1759 (2018)
Liu, X., Chen, T.: Synchronization of nonlinear coupled networks via aperiodically intermittent pinning control. IEEE Trans. Neural Netw. Learn. Syst. 26(1), 113–126 (2015)
Wang, B., Chen, W., Wang, J., Zhang, B., Zhang, Z., Qiu, X.: Cooperative tracking control of multiagent systems: a heterogeneous coupling network and intermittent communication framework. IEEE Trans. Cybern. 49(12), 4308–4320 (2019)
Wang, B., Zhang, Y., Zhang, B.: Exponential synchronization of nonlinear complex networks via intermittent pinning control on time scales. Nonlinear Anal. Hybrid Syst. 37, 100903 (2020)
Yu, Z., Jiang, H., Hu, C.: Second-order consensus for multiagent systems via intermittent sampled data control. IEEE Trans. Syst. Man Cybern. Syst. 48(11), 1986–2002 (2018)
Liu, X., Xiao, J., Chen, D., Wang, Y.: Dynamic consensus of nonlinear time-delay multi-agent systems with input saturation: an impulsive control algorithm. Nonlinear Dyn. 97, 1699–1710 (2019)
Ye, Y., Su, H., Chen, J., Peng, Y.: Consensus in fractional-order multi-agent systems with intermittence sampled data over directed networks. IEEE Trans. Circuits Syst. Ii Exp. Briefs 67(2), 365–369 (2020)
Ding, L., Han, Q.L., Ge, X., Zhang, X.M.: An overview of recent advances in event-triggered consensus of multiagent systems. IEEE Trans. Cybern. 48(4), 1110–1123 (2018)
Liu, K., Duan, P., Duan, Z., Cai, H., Lü, J.: Leader-following consensus of multi-agent systems with switching networks and event-triggered control. IEEE Trans. Circuits Syst. I, Reg. Papers 65(5), 1696–1706 (2018)
Zou, W., Shi, P., Xiang, Z., Shi, Y.: Consensus tracking control of switched stochastic nonlinear multiagent systems via event-triggered strategy. IEEE Trans. Neural Netw. Learn. Syst. 31(3), 1036–1045 (2020)
Li, X., Tang, Y., Karimi, H.R.: Consensus of multi-agent systems via fully distributed event-triggered control. Automatica 116, 108898 (2020)
Sun, Z., Huang, N., Anderson, B.D.O., Duan, Z.: Event-based multiagent consensus control: Zeno-free triggering via \({L}^p\) signals. IEEE Trans. Cybern. 50(1), 284–296 (2020)
Fan, Y., Liu, L., Feng, G., Wang, Y.: Self-triggered consensus for multi-agent systems with Zeno-free triggers. IEEE Trans. Autom. Control 60(10), 2779–2784 (2015)
Wan, Y., Wen, G., Yu, X., Huang, T.: Distributed consensus tracking of networked agent systems under denial-of-service attacks. IEEE Trans. Syst. Man Cybern. Syst. https://doi.org/10.1109/TSMC.2019.2960301
Feng, Z., Hu, G.: Secure cooperative event-triggered control of linear multiagent systems under DoS attacks. IEEE Trans. Control Syst. Technol. 28(3), 741–752 (2020)
Girard, A.: Dynamic triggering mechanisms for event-triggered control. IEEE Trans. Autom. Control 60(7), 1992–1997 (2015)
Hu, W., Yang, C., Huang, T., Gui, W.: A distributed dynamic event-triggered control approach to consensus of linear multiagent systems with directed networks. IEEE Trans. Cybern. 50(2), 869–874 (2020)
He, W., Xu, B., Han, Q.L., Qian, F.: Adaptive consensus control of linear multiagent systems with dynamic event-triggered strategies. IEEE Trans. Cybern. 50(7), 2996–3008 (2020)
Ma, Y., Li, Z., Zhao, J.: \(\cal{H} _{\infty }\) control for switched systems based on dynamic event-triggered strategy and quantization under state-dependent switching. IEEE Trans. Circuits Syst. I, Reg. Papers 67(9), 3175–3186 (2020)
Liu, L., Zhou, W., Li, X., Sun, Y.: Dynamic event-triggered approach for cluster synchronization of complex dynamical networks with switching via pinning control. Neurocomputing 340, 32–41 (2019)
Xu, W., Hu, G., Ho, D.W.C., Feng, Z.: Distributed secure cooperative control under denial-of-service attacks from multiple adversaries. IEEE Trans. Cybern. 50(8), 3458–3467 (2020)
Cui, Y., Liu, Y., Zhang, W., Alsaadi, F.E.: Event-based consensus for a class of nonlinear multi-agent systems with sequentially connected topology. IEEE Trans. Circuits Syst. I, Reg. Papers 65(10), 3506–3518 (2018)
Du, H., Wen, G., Wu, D., Cheng, Y., Lü, J.: Distributed fixed-time consensus for nonlinear heterogeneous multi-agent systems. Automatica 113, 108797 (2020)
Hu, A., Cao, J.: Consensus of multi-agent systems via intermittent event-triggered control. Int. J. Syst. Sci. 48(2), 280–287 (2017)
Wen, G., Duan, Z., Li, Z., Chen, G.: Consensus and its \(L_{2}\)-gain performance of multiagent systems with intermittent information transmissions. Int. J. Control 85(4), 384–396 (2012)
He, W., Zhang, B., Han, Q.L., Qian, F., Kurths, J., Cao, J.: Leader-following consensus of nonlinear multiagent systems with stochastic sampling. IEEE Trans. Cybern. 47(2), 327–338 (2017)
Borgers, D.P., Dolk, V.S., Heemels, W.P.M.H.: Dynamic event-triggered control with time regularization for linear systems. In: 2016 IEEE 55th Conference on Decision and Control (CDC), pp. 1352–1357 (2016)
He, N., Shi, D., Chen, T.: Self-triggered model predictive control for networked control systems based on first-order hold. Int. J. Robust Nonlinear Control 28(4), 1303–1318 (2018)
Horn, R.A., Johnson, C.R.: Matrix analysis. Cambridge University Press (1990)
Song, Q., Liu, F., Cao, J., Yu, W.: \({M}\)-matrix strategies for pinning-controlled leader-following consensus in multiagent systems with nonlinear dynamics. IEEE Trans. Cybern. 43(6), 1688–1697 (2013)
Berman, A., Plemmons, R.J.: Nonnegative matrices in the mathematical sciences. SIAM (1994)
Feng, S., Tesi, P.: Resilient control under Denial-of-Service: Robust design. Automatica 79, 42–51 (2017)
Li, X., Wang, X., Chen, G.: Pinning a complex dynamical network to its equilibrium. IEEE Trans. Circuits Syst. I 51(10), 2074–2087 (2004)
Acknowledgements
This work of A. Hu was supported by the Natural Science Foundation of Jiangsu Province (No. BK20181342). The work of J.H. Park was supported by the National Research Foundation of Korea (NRF) grant funded by the Korea government (MSIT) (No. 2020R1A2B5B02002002).
Author information
Authors and Affiliations
Corresponding authors
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Hu, A., Park, J.H. & Hu, M. Consensus of nonlinear multiagent systems with intermittent dynamic event-triggered protocols. Nonlinear Dyn 104, 1299–1313 (2021). https://doi.org/10.1007/s11071-021-06321-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-021-06321-6