
Abstract
This article investigates the exponential ultimate boundedness of fractional-order differential systems via periodically intermittent control. By utilizing the Lyapunov function method and the monotonicity of the Mittag-Leffler function along with the periodically intermittent controller, several sufficient conditions ensuring the exponential ultimate boundedness of the addressed systems are obtained. An example is given to explain the obtained results.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Differential systems arise from a lot of applications such as commerce, finance, medicine, neural networks [1,2,3,4]. Among these applications, boundedness is an essential and useful characteristic to analyze their dynamic behavior. Notably, it provides an effective tool to estimate the asymptotical controllability and thus plays an indispensable role in nonlinear control systems. Thus, the boundedness research of differential systems becomes a hot topic and develops rapidly (see, e.g., [5,6,7,8,9,10,11]).
Meanwhile, there are also developed many useful control methods to measure the boundedness of nonlinear control systems, such as impulsive control [12,13,14], fuzzy control [15, 16], dissipative control [17, 18] and intermittent control [19,20,21] and so on. Intermittent control, which was first proposed by Deissenberg [17] to achieve optimal control of linear economic models, has been used for a wide variety of applications such as mechanics, neural networks, chaotic control and secure communication. For example, the intermittent control offers an impressive way to tackle the signal-loss problems which may occur during the transmission and even the chaotic phenomena due to sensitive dependence on initial conditions. As is well known, the intermittent control and the impulsive control are regarded as the discontinuous control methods. Compared with the continuous control methods, the discontinuous control methods have main advantages in saving working time and reducing the control cost. Furthermore, compared with the impulsive control, the periodically intermittent control has the advantage of easier operation due to it has a nonzero control time. Therefore, a large number of important results in terms of intermittent control (for example [17,18,19,20,21,22]) have been reported in the last decade.
On the other hand, as an extension of the classical integer-order calculus, fractional calculus [23, 24] has gained considerable popularity and importance in many different fields, such as physics, chemistry, control systems, aerodynamics, biological networks, coelastic materials and thermo-elasticity. Because the fractional-order differential operator has the memory and hereditary properties, the fractional-order differential systems can more exactly describe the actual phenomena than the integer-order ones. On the other side, as we know, the standard Lyapunov function method plays a key role in the stability analysis of integer-order differential systems. However, for arbitrary \(0<q<1\), the Leibniz chain rule with Caputo fractional-order derivatives \(_{t_0}^CD_t^{q}(fg)=(_{t_0}^CD_t^{q}g)f+(_{t_0}^CD_t^{q}f)g\) cannot be derived [25], in which a counterexample has been given. In addition, the most difficulty that we have to overcome is to construct a suitable Lyapunov function(al) and calculate its fractional-order derivative, which is also the main reason that there is not many practical studies on this subject. Although some effective control methods have been developed to investigate the stability, stabilization, synchronization and quasi-synchronization of the fractional-order differential systems (see for example [26,27,28,29,30,31]), the problem of the intermittent control for the boundedness of the fractional-order differential systems is more complicated and still open.
Motivated by the above discussion, our main purpose is to fill this gap in this paper. Firstly, we propose a class of fractional-order differential systems and present two new lemmas about the monotonicity of the Mittag-Leffler function. Based on these lemmas, and utilizing the Lyapunov function and the periodically intermittent controller, several related sufficient conditions ensuring the exponential ultimate boundedness of the addressed fractional-order differential systems are derived. From our results, we shall see that the intermittent controller can make the unstable system into the stable one. Moreover, the obtained results on the boundedness of the addressed systems still hold even \(q=1\).
The main contributions of this paper can be summarized as follows: (i) the periodically intermittent control is introduced for the first time to the boundedness analysis of the fractional-order differential systems; (ii) the monotonicity of the function \(H(t)=t^qE_{q,q+1}(at^q)\) is discussed; (iii) some sufficient conditions are derived to ensure the exponential ultimate boundedness of the considered systems.
This paper is organized as follows. We formulate a class of fractional-order differential systems with periodically intermittent controller and indicate some elementary notations and definitions in Sect. 2. Four useful lemmas and several criteria ensuring exponential ultimate boundedness are addressed in Sect. 3. A numerical simulation illustrated the effectiveness of the derived bounded results in Sect. 4. Finally, the conclusion of this paper is drawn in Sect. 5.
2 Preliminaries
Let \({\mathbb {N}}\) be the natural numbers, \(I_n\) be the nth identity matrix and \({\mathbb {R}}^n\) (\({\mathbb {R}}^{n\times n}\)) be the set of n(\(n\times n\))-dimensional real vectors (matrices). \(\Vert \cdot \Vert \) denotes the Euclidean norm in \({\mathbb {R}}^n\), \({\mathbb {R}}_+=[0,\infty )\). \(\lambda _{\max }(\cdot )\) and \(\lambda _{\min }(\cdot )\) denote the maximum and the minimum eigenvalue of the corresponding matrix, respectively. For convenience, some useful definitions and facts in [32] are listed here.
Gamma function\(\varGamma (z)\):
where the real part Re(z) of complex number z satisfies \(Re(z)>0\).
Caputo fractional derivative:
One-parameter Mittag-Leffler function:
Two-parameter Mittag-Leffler function
Obviously, \(E_\alpha (z)=E_{\alpha ,1}(z)\).
In this paper, we consider the following fractional-order differential systems:
where \(x(t)=(x_1(t), \ldots , x_n(t))^T\in {\mathbb {R}}^n\) denotes the system state. \(A\in {\mathbb {R}}^{n\times n}\), \(f(x(t))=(f_1(x_1(t)), \ldots , f_n(x_n(t)))^T:{\mathbb {R}}^n\rightarrow {\mathbb {R}}^n\) with \(f_i(0)=0\) denotes the activation function of the system state, \(i=1,2,\ldots ,n, n\) is the number of units in a differential system. \(0<q<1\), and \(J\in {\mathbb {R}}^n\) is are an external bias vector. Let \(\mu (t)\) be an intermittent controller, which is described by
where \(K\in {\mathbb {R}}^{n\times n}\) is the control gain matrix, \(T>0\) denotes the control period and \(\tau >0\) is called the control width. Under control law (5), system (4) can be rewritten as
This is a classical switched system where the switching rule only depends on the time.
Definition 1
System (6) is said to be globally exponentially ultimately bounded if there exist constants \(r> 0\), \(K > 0\) and \(M\ge 0\) such that for any solution with the initial condition \(x_0\in {\mathbb {R}}^n\), \(\Vert x(t)\Vert \le K\Vert x_0\Vert e^{-r t}+M\), \(t\ge 0\).
3 Main results
In this section, some useful lemmas would be presented at first, then, the global exponential ultimate boundedness of the fractional-order differential systems (4) would be investigated using these lemmas.
Lemma 1
[33] Let \(y(t)\in {\mathbb {R}}^n\) be a vector of differentiable function. Then for any time constant \(t\ge t_0\), the following relationship holds
where \(q\in (0,1)\), \({\mathscr {P}}\in {\mathbb {R}}^{n\times n}\) is a constant, symmetric and positive definite matrix.
Lemma 2
[34] Let \(X\in {\mathbb {R}}^n , Y\in {\mathbb {R}}^n\), and a scalar \(\xi >0\). Then, it holds that
Lemma 3
For any \(q\in (0, 1)\), \(a\in {\mathbb {R}}\) and \(t\in {\mathbb {R}}_+\), the function \(H(t)=t^qE_{q,q+1}(at^q)\) is a monotonically increasing function.
Proof
From the assumptions, we easily get
Therefore, H(t) is a monotonically increasing function. \(\square \)
Lemma 4
Let \(0<q<1\), \(\hbar (t)\) is a continuous function on \([t_0,+\infty )\), if there exist constants \(\kappa _1\in {\mathbb {R}}\) and \(\kappa _2\ge 0\) such that
then
Proof
The proof of Lemma 4 is similar to that of Lemma 3 in [35], so be omitted here. And by the way, if \(\kappa _1<0\), Lemma 4 is exactly Lemma 3 in [35]. \(\square \)
Theorem 1
Assume that there exist several positive constants \( l_f\), \(\xi _1\), \(\xi _2\), \(\gamma \), \(\alpha _1\), \(\beta _1\) and a symmetric positive definite matrix \(P\in {\mathbb {R}}^{n\times n}\) such that
-
(i)
for \(\forall x_1,x_2\in {\mathbb {R}}^n\),
$$\begin{aligned} {\Vert f(x_1)-f(x_2)\Vert \le l_f\Vert x_1-x_2\Vert ,} \end{aligned}$$(12) -
(ii)
$$\begin{aligned}&A^TP+K^TP+PA+PK+\xi _1P^2\nonumber \\&\quad +\xi _1^{-1}l_f^2I_n+\xi _2P^2+\alpha _1 P\le 0, \end{aligned}$$(13)
-
(iii)
$$\begin{aligned}&A^TP+PA+\xi _1P^2+\xi _1^{-1}l_f^2I_n\nonumber \\&\quad +\xi _2P^2-\beta _1 P\le 0, \end{aligned}$$(14)
-
(iv)
$$\begin{aligned} \gamma =E_q(-\alpha _1\tau ^q) E_q(\beta _1(T-\tau )^q)<1. \end{aligned}$$(15)
Then, System (6) is globally exponentially ultimately bounded and the solution x(t) will exponentially converge to the compact set defined by
where \(\lambda =\max \{\tau ^qE_{q,q+1}(\beta _1\tau ^q),(T-\tau )^qE_{q,q+1}(\beta _1(T-\tau )^q)\}\) and \(\lambda _3=E_q(\beta _1(T-\tau )^q)\).
Proof
Consider the candidate Lyapunov function
Obviously, we have
By Lemma 1, we obtain the q-order Caputo derivatives of V(x(t)) along the trajectories of the first subsystem of system (6) for \(t\in [nT,nT+\tau )\), \(n\in {\mathbb {N}}\), as follows
Taking into account Lemma 2 and (12)–(14), we obtain
Similarly, when \(t\in [nT+\tau ,(n+1)T)\), we have
Next, taking into account (20) and (21), we will estimate V(t). For \(t\in [nT,nT+\tau )\), by (20) and Lemma 4, we have
On the other hand, when \(t\in [nT+\tau ,(n+1)T)\), by (21) and Lemma 4, we have
From (22), (23), it follows that:
(1) when \(t\in [0,\tau )\), we obtain
and
(2) when \(t\in [\tau ,T)\), we have
(3) when \(t\in [T,T+\tau )\), we have
(4) when \(t\in [T+\tau ,2T)\), we have
By induction, we have:
(5) when \(t\in [nT,nT+\tau )\),
(6) when \(t\in [nT+\tau ,(n+1)T)\), we have
where \(\blacktriangle =\sum _{i=0}^{n}\tau ^qE_{q,q+1}(-\alpha _1 \tau ^q)[E_q(-\alpha _1 \tau ^q)E_q(\beta _1(T-\tau )^q)]^i\) and \(\blacksquare =\sum _{i=1}^{n}(T-\tau )^qE_{q,q+1}(\beta _1(T-\tau )^q)E_q(-\alpha _1 \tau ^q)[E_q(-\alpha _1 \tau ^q)E_q(\beta _1(T-\tau )^q)]^{i-1}\).
By Lemma 3, we have
and
From (32)–(35) and the fact that \(0<E_q(x)\le 1\) for \(0<q<1\) and \(x\le 0\), we have
and
Combining (36) and (37), we obtain
where \(\lambda _1=\max \{\lambda _2,1\}\), \(\lambda _2=\max _{\theta \in [0,T-\tau ]}E_q(\beta _1\theta ^q)\) and \(\lambda _3=E_q(\beta _1(T-\tau )^q)\). Therefore, for any \(t\ge t_0\),
which concludes the proof. \(\square \)
Corollary 1
Suppose that all conditions in Theorem 1 hold. Then, System (6) with \(J=0\) is globally exponentially stable with the exponential convergence rate \(r=-\frac{\ln \gamma }{2T}\).
Remark 1
As Li et al. point out in [19], the periodic feedback will reduce to the general continuous feedback when \(\tau \rightarrow T\). In this case, Conditions (i) and (ii) in the theorem are enough for ensuring the globally exponential ultimate boundedness of the system (4) with the continuous feedback control \(\mu (t)=Kx(t)\) for any \(\tau \ge 0\). In fact, \(\tau \rightarrow T\), Condition (iii) is otiose, and Condition (iv) holds obviously since \(E_q(-\alpha _1T^q)<1\) and \(E_q(0)=1\).
Replacing \(K\in {\mathbb {R}}^{n\times n}\) by \(k\in {\mathbb {R}}\) in (5), we obtain the following special intermittent controller
where \(k\in {\mathbb {R}}\).
Corollary 2
If all the conditions in Theorem 1 hold, except that Condition (ii) is replaced by
- (ii)\('\):
-
$$\begin{aligned} \alpha _1+\beta _1+2k\le 0. \end{aligned}$$(42)
Then, System (4) under the controller (41) is globally exponentially ultimately bounded and the solution x(t) will exponentially converge to the compact set defined by
where \(\lambda =\max \{\tau ^qE_{q,q+1}(\beta _1\tau ^q),(T-\tau )^qE_{q,q+1}(\beta _1(T-\tau )^q)\}\) and \(\lambda _3=E_q(\beta _1(T-\tau )^q)\).
Proof
The proof is similar to that of Theorem 1 and then omitted.
If fractional-order \(q=1\), the fractional-order differential system (6) turns to the following integer-order differential systems
where \(K\in {\mathbb {R}}^{n\times n}\). \(\square \)
Remark 2
When \(q=1\), Lemma 3 still holds. In fact, when \(q=1\), \(H(t)=t^qE_{q,q+1}(at^q)=\frac{e^{at}-1}{a}\). So, \({\dot{H}}(t)=e^{at}>0,\) and Lemma 3 still holds for \(q=1\).
With the help of Remark 2, we can know that the above results and their proofs still hold for \(q=1\). Therefore, the following results are valid.
Theorem 2
If all the conditions in Theorem 1 hold, except that Condition (iv) is replaced by
- (iv)\('\):
-
$$\begin{aligned} \beta _1T-(\alpha _1+\beta _1)\tau <0. \end{aligned}$$(45)
Then, System (44) is globally exponentially ultimately bounded and the solution x(t) will exponentially converge to the compact set defined by
where \(\lambda =\max \{\frac{e^{\beta _1\tau }-1}{\beta _1},\frac{e^{\beta _1(T-\tau )}-1}{\beta _1}\}\) and \(\lambda _3=e^{\beta _1(T-\tau )}\).
Corollary 3
Suppose that all conditions in Theorem 2 hold. Then, System (44) with \(J=0\) is globally exponentially stable.
Remark 3
The linear matrix inequalities may help us to verify the negative definiteness of the left of (13) and (14). In fact, according to the theory of the Schur complement, one can know that the following inequalities (47) and (48) imply (13) and (14), respectively.
where \({\mathscr {G}}=A^TP+PA+\xi _1^{-1}l_f^{2}I_n+\alpha _1P+\frac{1}{\xi _1+\xi _2}(I_n-K^T-K)\).
Remark 4
Though some interesting results concerning the intermittent control problem of the fractional-order differential systems have been reported [36,37,38], these results are limited to the stability. Obviously, these results are not appropriate for the exponential ultimate boundedness of fractional-order differential systems. Therefore, techniques and methods for the boundedness of fractional-order differential systems with intermittent control should be developed and explored. In order to prove our theory, a new fractional-order differential inequality needs to be introduced, the monotonicity of the function \(H(t)=t^qE_{q,q+1}(at^q)\) needs to be discussed, and the upper bound of \(\Vert x(t)\Vert \) should be estimated, which lead to a more difficult and complex proof process than the one in [36,37,38].
4 Illustrative example
The following illustrative example will demonstrate the effectiveness of our results.

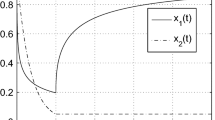
State trajectories of Sys. (6) with the initial values \((\hbox {x}_1(0)\),\(\hbox {x}_2(0))^T=(1.5,-1.5)^T\), \((9.5,-2.5)^T\), \((-1.5,3.5)^T\), \((-9,4)^T,(-5,2)^T\)
Example 1
Consider system (6) with the following parameters
Taking
By simple computation, we have \(l_f=0.1\),
It follows from Theorem 1 that System (6) is globally exponentially ultimately bounded and the solution x(t) will exponentially converge to the compact set defined by

State trajectories of the Sys. (6) without intermittent controller, with the initial values \((\hbox {y}_1(0),\hbox {y}_2(0))^T=(1.5,-1.5)^T\), \((9.5,-2.5)^T\), \((-1.5,3.5)^T\), \((-9,4)^T,(-5,2)^T\)

State trajectories of Sys. (6) with \(J=(0,0)^T\) and the initial values \((\hbox {x}_1(0),\hbox {x}_2(0))^T=(1.5,-1.5)^T\), \((9.5,-2.5)^T\), \((-1.5,3.5)^T, (-9,4)^T,(-5,2)^T\)
The numerical simulation of the periodically intermittent control system (6) is shown in Fig. 1, and the corresponding original system is shown in Fig. 2. From Figs. 1 and 2, we see that intermittent controller can make the unbounded system into the bounded one.
Remark 5
If \(J=(0,0)^T\) and all other parameters are the same as that of Example 1. It follows from Corollary 1 that system (6) is globally exponentially stable. The numerical simulation of the periodically intermittent control system (6) with \(J=(0,0)^T\) is shown in Fig. 3 and the corresponding original system with \(J=(0,0)^T\) is shown in Fig. 4. From Figs. 3 and 4, we see that intermittent controller can make the unstable system into the stable one.
5 Conclusion

State trajectories of the Sys. (6) without intermittent controller, with \(J=(0,0)^T\) and the initial values \((\hbox {x}_1(0),\hbox {x}_2(0))^T=(1.5,-1.5)^T\), \((9.5,-2.5)^T\), \((-1.5,3.5)^T\), \((-9,4)^T,(-5,2)^T\)
In this paper, we have investigated the exponential ultimate boundedness for a class of fractional-order differential systems by means of periodically intermittent control. By utilizing the Lyapunov function method and the monotonicity of the Mittag-Leffler function along with the periodically intermittent controller, sufficient conditions ensuring the exponential ultimate boundedness of the addressed systems have been derived. Both theoretical and numerical analysis have shown the effectiveness of the contributed results.
Although the problem of the intermittent control for the boundedness of the fractional-order differential systems has been discussed in this paper, the time delays were ignored in the addressed systems. As is well known, time delays are usually inevitable in many practical systems. They can deteriorate the control performance and can even destroy the stability and the boundedness of the systems. Therefore, it is significant to investigate the boundedness of fractional-order delay differential systems. How to extend the current results to the delay case is still a challenge, which is our future research topic.
References
Xu, D., Yang, Z.: Impulsive delay differential inequality and stability of neural networks. J. Math. Anal. Appl. 305, 107–120 (2005)
Huang, Y., Xu, D., Yang, Z.: Dissipativity and periodic attractor for non-autonomous neural networks with time-varying delays. Neurocomputing 70, 2953–2958 (2007)
Xu, D., Long, S.: Attracting and quasi-invariant sets of non-autonomous neural networks with delays. Neurocomputing 77, 222–228 (2012)
Xu, L., Xu, D.: Exponential \(p\)-stability of impulsive stochastic neural networks with mixed delays. Chaos Solitons Fractals 41, 263–272 (2009)
Xu, D., Zhou, W.: Existence-uniqueness and exponential estimate of pathwise solutions of retarded stochastic evolution systems with time smooth diffusion coefficients. Discrete Contin. Dyn. Syst. Ser. A 37, 2161–2180 (2017)
Xu, D., Xu, L.: New results for studying a certain class of nonlinear delay differential systems. IEEE Trans. Autom. Control 55, 1641–1645 (2010)
Xu, L., Ge, S.S., Hu, H.: Boundedness and stability analysis for impulsive stochastic differential equations driven by \(G\)-Brownian motion. Int. J. Control (2017). https://doi.org/10.1080/00207179.2017.1364426
Xu, L., Ge, S.S.: Asymptotic behavior analysis of complex-valued impulsive differential systems with time-varying delays. Nonlinear Anal. Hybrid Syst. 27, 13–28 (2018)
Hu, H., Xu, L.: Existence and uniqueness theorems for periodic Markov process and applications to stochastic functional differential equations. J. Math. Anal. Appl. 466, 896–926 (2018)
Fan, X., Chen, H.: Attractors for the stochastic reaction–diffusion equation driven by linear multiplicative noise with a variable coefficient. J. Math. Anal. Appl. 398, 715–728 (2013)
He, D., Xu, L.: Ultimate boundedness of non-autonomous dynamical complex networks under impulsive control. IEEE Trans. Circuits Syst. II Exp. Briefs 62, 997–1001 (2015)
Xu, L., Hu, H., Qin, F.: Ultimate boundedness of impulsive fractional differential equations. Appl. Math. Lett. 62, 110–117 (2016)
Xu, L., Dai, Z., He, D.: Exponential ultimate boundedness of impulsive stochastic delay differential equations. Appl. Math. Lett. 85, 7–76 (2018)
Rakkiyappan, R., Balasubramaniama, P., Cao, J.: Global exponential stability results for neutral-type impulsive neural networks. Nonlinear Anal. Real World Appl. 11, 122–130 (2010)
Li, X., Rakkiyappanb, R., Balasubramaniam, P.: Existence and global stability analysis of equilibrium of fuzzy cellular neural networks with time delay in the leakage term under impulsive perturbations. J. Frankl. Inst. 348, 135–155 (2011)
Zhou, C., Zhang, H., Zhang, H., Dang, C.: Global exponential stability of impulsive fuzzy Cohen–Grossberg neural networks with mixed delays and reaction–diffusion terms. Neurocomputing 91, 67–76 (2012)
Deissenberg, C.: Optimal control of linear econometric models with intermittent controls. Econ. Plan. 16, 49–56 (1980)
Zochowski, M.: Intermittent dynamical control. Physica D 145, 181–190 (2000)
Li, C., Feng, G., Liao, X.: Stabilization of nonlinear systems via periodically intermittent control. IEEE Trans. Circuits Syst. II Exp. Briefs 54, 1019–1023 (2007)
Hu, C., Yu, J., Jiang, H., Teng, Z.: Exponential stabilization and synchronization of neural networks with time-varying delays via periodically intermittent control. Nonlinearity 23, 2369–2391 (2010)
Huang, J., Li, C., Han, Q.: Stabilization of delayed chaotic neural networks by periodically intermittent control. Circuits Syst. Signal Process. 28, 567–579 (2009)
Song, Q., Huang, T.: Stabilization and synchronization of chaotic systems with mixed time-varying delays via intermittent control with non-fixed both control period and control width. Neurocomputing 154, 61–69 (2015)
Samko, S., Kilbas, A., Marichev, O.: Fractional Integrals and Derivatives: Theory and Applications. Gordon and Breach, Yverdon (1993)
Zähle, M.: Integration with respect to fractal functions and stochastic calculus I. Probab. Theory Relat. Fields 111, 333–374 (1998)
Aguila-Camacho, N., Duarte-Mermoud, M.A.: Comments on “fractional order Lyapunov stability theorem and its applications in synchronization of complex dynamical networks”. Commun. Nonlinear Sci. Numer. Simul. 25, 145–148 (2015)
Yang, X., Song, Q., Li, C., Huang, T.: Global Mittag–Leffler stability and synchronization analysis of fractional-order quaternion-valued neural networks with linear threshold neurons. Neural Netw. 47, 427–442 (2018)
Song, Q., Yang, X., Li, C., Huang, T., Chen, X.: Stability analysis of nonlinear fractional-order systems with variable-time impulses. J. Frankl. Inst. 354, 2959–2978 (2017)
Wang, F., Yang, Y., Hu, A., Xu, X.: Exponential synchronization of fractional-order complex networks via pinning impulsive control. Nonlinear Dyn. 82, 1979–1987 (2015)
Wang, F., Yang, Y., Xu, X., Li, L.: Global asymptotic stability of impulsive fractional-order BAM neural networks with time delay. Neural Comput. Appl. 28, 345–352 (2017)
Wang, F., Yang, Y.: Quasi-synchronization for fractional-order delayed dynamical networks with heterogeneous nodes. Appl. Math. Comput. 339, 1–14 (2018)
Xu, L., Li, J., Ge, S.S.: Impulsive stabilization of fractional differential systems. ISA Trans. 70, 125–131 (2017)
Podlubny, I.: Fractional Differential Equations. Academic Press, San Diego (1999)
Duarte-Mermoud, M., Aguila-Camacho, N., Gallegos, J., Castro-Linares, R.: Using general quadratic Lyapunov functions to prove Lyapunov uniform stability for fractional order systems. Commun. Nonlinear Sci. Numer. Simul. 22, 650–659 (2015)
Xu, S., Chen, T., Lam, J.: Robust \(H_\infty \) filtering for uncertain Markovian jump systems with mode-dependent time delays. IEEE Trans. Autom. Control 48(5), 900–907 (2003)
Wu, A., Zeng, Z.: Boundedness, Mittag–Leffler stability and asymptotical \(\omega \)-periodicity of fractional-order fuzzy neural networks. Neural Netw. 74, 73–84 (2015)
Wan, P., Jian, J., Mei, J.: Periodically intermittent control strategies for \(\alpha \)-exponential stabilization of fractional-order complex-valued delayed neural networks. Nonlinear Dyn. 92, 247–265 (2018)
Wang, F., Yang, Y.: Intermittent synchronization of fractional order coupled nonlinear systems based on a new differential inequality. Physica A 512, 142–152 (2018)
Li, H., Hu, C., Jiang, H., Teng, Z., Jiang, Y.: Synchronization of fractional-order complex dynamical networks via periodically intermittent pinning control. Chaos Solitons Fractals 103, 357–363 (2017)
Acknowledgements
The work is supported by the National Natural Science Foundation of China under Grants 11501518, 11771397 and 11701060 and the Natural Science Foundation of Chongqing under Grant KJ1704099. The authors are very grateful to the Editors and the Reviewers for their insightful and constructive comments.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that there is no conflict of interest in preparing this article.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Xu, L., Liu, W., Hu, H. et al. Exponential ultimate boundedness of fractional-order differential systems via periodically intermittent control. Nonlinear Dyn 96, 1665–1675 (2019). https://doi.org/10.1007/s11071-019-04877-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-019-04877-y