
Abstract
Up to now, the problem of sensor fault estimation for integer-order descriptor systems has been tackled by several researchers. However, no attempt has been done to estimate sensor faults for fractional-order descriptor systems. In this context, this paper presents a complete methodology to solve this problem. On the other hand, to the best of our knowledge, among all the existing works dealing with the observer design task for fractional-order descriptor systems, no paper has treated the special class of one-sided Lipschitz systems. In this paper, the designed observer is capable of estimating sensor faults for one-sided Lipschitz systems, thanks to a linear matrix inequality technique. In order to validate the theoretical results, a second-order numerical example as well as a third-order one are studied in the simulation section. The simulation results show that the sensor fault estimates are satisfactory.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Estimating faults that may appear in dynamic systems is a necessary task for some diagnosis and fault-tolerant control (DFTC) schemes. Indeed, as mentioned in [1, 2], detecting and isolating faults are insufficient for several fault-tolerant controllers. These controllers need accurate estimates of the actual faults, in order to guarantee desired performances, in the fault-free mode as well as in the faulty mode. Faults that may happen in real systems include sensor faults, actuator faults and component faults. Sensor faults, which are treated in the present paper, denote every kind of malfunctioning that can affect one or several sensors in the process. Among the different types of sensor faults, we treat in this paper constant sensor faults. Technically speaking, these faults reflect a constant bias between the measured output signal and the real output signal.
Due to their great importance, observers have been amply investigated in the literature, in different contexts [3,4,5,6,7]; they have been particularly used for the fault estimation purpose [8, 9]. Generally, most of the existing papers, treating the observer-based fault estimation problem for nonlinear systems, use the traditional Lipschitz assumption. Though, Lipschitz observers present a major limitation: they can usually stabilize the error dynamics with a conveniently small Lipschitz constant. When this constant becomes large, the problem becomes unfeasible [10]. To relax this problem, the Lipschitz nonlinearity is substituted in the present paper by the one-sided Lipschitz nonlinearity. In fact, the one-sided Lipschitz constant is always smaller than its Lipschitz counterpart [10]. Another advantage of the one-sided Lipschitz property is the following: it has been proved in [10] that the one-sided Lipschitz class of systems is larger than the Lipschitz one, meaning that: using the one-sided Lipschitz nonlinearity, a broader family of nonlinear systems is covered. This new nonlinearity has been first introduced to the observer design problem by Hu [11]. Then, several researchers have shown interest in designing observers for one-sided Lipschitz systems, for instance [10, 12, 13]. Concerning sensor fault estimation for this class of systems, to the best of our knowledge, very few papers exist in the literature tackling this particular problem.
The previous mentioned survey of this section is about the classical integer-order systems, where the derivative order is equal to 1. However, the integer-order calculus is inconvenient for several physical systems whose true dynamics contain fractional (noninteger) derivatives. Such systems are conventionally called fractional-order systems. Fractional-order systems with a fractional derivative between 0 and 1 (the case treated in the present paper) correspond to an extension of the classical integer-order ones, so that a larger set of real systems is covered. To accurately model these systems, the fractional-order differential equations are used. For example, electromagnetic systems [14], heat transfer systems [15] and financial systems [16] have been modelled using the fractional-order calculus. In the last years, the use of fractional-order equations in the stability theory has distinctly risen [17, 18], and several works have been done in relation to the observer design problem for fractional-order systems. Note that only two papers have been recently done, tackling the fractional-order one-sided Lipschitz systems [19, 20] and without estimating possible faults.
On the other hand, most of the observer design and/or fault diagnosis works in the literature use normal models, where no algebraic relations between the system variables exist. Though, various physical systems such that power systems, robotics and electric systems [21] show in their models these algebraic equations, in addition to the ordinary differential equations. Such systems are called descriptor systems, singular systems or implicit systems. Readers can refer to this survey on physical descriptor systems [21]. In the last decade, researchers are showing a particular and increasing interest in the observer design and the observer-related problems for descriptor systems. In [22], functional observers are designed for integer-order linear descriptor systems. In [23], authors have proposed a generalized framework for robust nonlinear H\(\infty \) filtering of Lipschitz descriptor integer-order systems with parametric and nonlinear uncertainties. An example of works that have tackled the observer-based control for integer-order descriptor systems is given in [24]. Recently, several papers treating fractional-order descriptor systems have been established, but without solving the fault estimation problem (see for instance [25, 26]). On the other hand, observers for one-sided Lipschitz descriptor systems have been just tackled in the literature and only very few works have been very recently done within this specific topic [27, 28]. These very few works have treated the integer-order descriptor one-sided Lipschitz systems without estimating any type of faults. Otherwise, note that only few works have been done in the literature, in relation to sensor fault estimation for descriptor integer-order systems. Some of these works can be found in [29, 30].
Based on all the above discussions and inspired by the works of Gupta et al. [31], a first solution is presented in this paper to solve the problem of sensor fault estimation for one-sided Lipschitz descriptor integer-order and fractional-order systems. Thanks to a linear matrix inequality (LMI) technique and a suitable adaptation law, the sensor faults are estimated simultaneously with the state vector, and a complete methodology is given, with a detailed design procedure, in order to solve this particular problem. As discussed earlier, no paper exists in the literature combining the one-sided Lipschitz class of systems, the descriptor class of systems, the fractional-order calculus and the sensor fault estimation problem. In this context, the novelties of the present paper compared to the existing research works can be summarized as follows:
-
In [19, 20], the state estimation problem for normal fractional-order one-sided Lipschitz systems has been tackled. The present paper is more general than these cited works, since it extends the problem to descriptor systems, with the estimation of sensor faults.
-
In [25, 26], the stability analysis of linear fractional-order descriptor systems, without sensor faults, is achieved. The present paper is more general, since it treats nonlinear one-sided Lipschitz systems instead of linear systems, and the system model includes possible sensor faults.
-
In [27, 28], the system states are estimated for integer-order descriptor one-sided Lipschitz systems. The present paper is more general, since it extends the problem to fractional-order systems, with estimating sensor faults, too.
The rest of the paper is organized as follows. Useful results in relation to the fractional-order calculus and other preliminaries are presented in Sect. 2. Then, the main contributions, dealing with the sensor fault estimation strategy for one-sided Lipschitz descriptor fractional-order systems, are given in Sect. 3. Finally, simulation studies are presented in Sect. 4, to show the efficiency of the proposed scheme.
2 Problem statement and preliminaries
Some useful results about the fractional calculus, some definitions and the problem statement are given in this section. By the following two definitions, the Riemann–Liouville fractional integral and the Caputo fractional derivative are presented. In the literature, other concepts of the fractional derivative can be found in [32, 33].
Definition 1
The Riemann–Liouville fractional integral of order \(\alpha >0\) is defined as,
\(\varGamma \left( \alpha \right) =\int \nolimits _0^{+\infty } e^{-t}t^{\alpha -1}dt\) is the Gamma function generalizing factorial for noninteger arguments.
Definition 2
Let a be the integer part of \(\alpha +1\). The Caputo fractional derivative is defined as,
When \(0<\alpha <1\), the Caputo fractional derivative of order \(\alpha \) of \(x\left( t \right) \) can be reduced as:
By the next definition, a frequently used function in the resolution of fractional-order systems is presented. This function can be regarded as a generalization of the exponential function.
Definition 3
The Mittag–Leffler function with two parameters is defined as
where \(\alpha>0, \mu >0, \xi \in {\mathbb {C}}\). When \(\mu =1\), one has \(E_\alpha \left( \xi \right) =E_{\alpha ,1} \left( \xi \right) \) , furthermore, \(E_{1,1} \left( \xi \right) =e^{\xi }.\)
In this paper, the following nonlinear fractional-order descriptor system is considered, for all \(t\ge t_0 \) and with a fractional derivative order \(\alpha \in ] {0,1} ]\)
where \(x\in {\mathbb {R}}^{n}\) is the state, \(u\in {\mathbb {R}}^{m}\) is the input, \(y\in {\mathbb {R}}^{p}\) is the output, \(f\in {\mathbb {R}}^{q}\) is a constant fault vector, \(E^{*},A^{*}\in {\mathbb {R}}^{n\times n}\), \(B^{*}\in {\mathbb {R}}^{n\times m}\), \(D^{*}\in {\mathbb {R}}^{n\times n_d }\), \(H\in {\mathbb {R}}^{n_h \times n}\), \(F\in {\mathbb {R}}^{p\times q}\) and \(C\in {\mathbb {R}}^{p\times n}\) are known constant matrices. With the condition \(\hbox {rank}\left( {E^{*}} \right) =r<n\), the matrix \(E^{*}\) is singular and system (1) is a descriptor system, else it is a normal system. Without loss of generality, let \(\hbox {rank}\left( C \right) =p\). The nonlinear part \(\varphi \left( {Hx,u} \right) \) is supposed to satisfy the one-sided Lipschitz and the quadratic inner-boundedness conditions, given by the two next definitions. Note that, as shown in [10], the class of nonlinear systems satisfying the one-sided Lipschitz and the quadratic inner-boundedness properties represents a broader family of nonlinear systems, compared to the class of Lipschitz systems.
Definition 4
Function \(\varphi \left( {Hx,u} \right) \) is one-sided Lipschitz in \({\mathbb {R}}^{n}\) with a one-sided Lipschitz constant \(\rho \) , if \(\forall x_1 ,x_2 \in {\mathbb {R}}^{n}\)
Definition 5
Function \(\varphi \left( {Hx,u} \right) \) is quadratically inner bounded in \({\mathbb {R}}^{n}\) , if \(\forall x_1 ,x_2 \in {\mathbb {R}}^{n}\)
, where \(\beta \) and \(\gamma \) are known scalars.
Definition 6
System (1) is said to be globally Mittag–Leffler stable if there exist positive scalars b and \(\lambda \) such that the trajectory of (1) passing through any initial state \(x_0 \) at any initial time \(t_0 \) evaluated at time t satisfies:
with \(m\left( 0 \right) =0,m\left( x \right) \ge 0\) and m is locally Lipschitz.
Theorem 2.1
[34] Let \(x=0\) be an equilibrium point for system (1). Let \(V:\left[ {0,\infty } \right) \times {\mathbb {R}}^{n}\rightarrow {\mathbb {R}}\) be a continuously differentiable function and locally Lipschitz with respect to x such that
where \(t\ge t_0 , x\in {\mathbb {R}}^{n},\alpha \in ] {0,1} [,\mu _1 ,\mu _2 ,\mu _3 ,c\) and d are arbitrary positive constants. Then, \(x=0\) is globally Mittag–Leffler stable.
Lemma 1
[35] Let \(\alpha \in ] {0,1} [\) and \(P\in {\mathbb {R}}^{n\times n}\) a constant symmetric and positive definite matrix. Then, the following relationship holds
In the next section, the main results of this paper are presented. A complete and general procedure is proposed to estimate sensor faults for the general class of integer-order and fractional-order descriptor one-sided Lipschitz systems.
3 Sensor fault estimation strategy
In this section, an overall scheme is given in order to reconstruct constant sensor faults. The organization of the section is as follows. First, a system transformation step is presented. Then, the main part dealing with the observer design and the LMI formulation is detailed. Finally, a summarizing design procedure is given. But to begin, the following assumption should be cited.
Assumption 1
The triple matrix \(\left( {E^{*},A^{*},C} \right) \) satisfies the following conditions [36, 37]:
where \({\mathbb {C}}\) denotes the complex plane.
3.1 System transformation
Later, in order to guarantee the existence of the designed observer, system (1) has to be transformed into the following equivalent restricted system, by means of a nonsingular matrix \(R\in {\mathbb {R}}^{n\times n}\).
where \(E=RE^{*},A=RA^{*},B=RB^{*}\) and \(D=RD^{*}\). Note that, according to [38]: When assumption 1 holds, one has the following property
If (5) is satisfied from the beginning with \(E^{*}\), i.e \(\hbox {rank}\left[ {{\begin{array}{c} {I-E^{*}} \\ C \\ \end{array} }} \right] =p\), then there is no need to make the system transformation and to calculate the matrix R (one takes \(R=I_n )\). The existence proof of the matrix R can be found in [38]. R is constructed as follows [31]:
If \(\hbox {rank}\left[ {{\begin{array}{c} {I-E^{*}} \\ C \\ \end{array} }} \right] =p\) then take \(R=I_n \) and stop.
Else (under assumption 1), follow these instructions:
-
Make the singular value decomposition of C: \(C=U_1 \left[ {D_1 \,\, 0} \right] V_1 ^\mathrm{T}\).
-
Compute \(Q=V_1 \left[ {{\begin{array}{cc} {D_1 ^{-1}U_1 ^\mathrm{T}}&{}\quad 0 \\ 0&{}\quad {I_{n-p} } \\ \end{array} }} \right] \).
-
Compute \({\bar{E}} =E^{*}Q\left[ {{\begin{array}{c} 0 \\ {I_{n-p} } \\ \end{array} }} \right] \).
-
Make the singular value decomposition of \({\bar{E}} \) : \({\bar{E}} =U_2 \left[ {{\begin{array}{c} {D_2 } \\ 0 \\ \end{array} }} \right] V_2 \).
-
Compute \(R_0 =\left[ {{\begin{array}{cc} 0&{}\quad {I_p } \\ {V_2 ^\mathrm{T}D_2 ^{-1}}&{}\quad 0 \\ \end{array} }} \right] U_2 ^\mathrm{T}\).
-
Compute \(R=QR_0 \).
3.2 Observer design and LMI formulation
Let system (6) be an observer for the fractional-order descriptor system (1). Since (4) is the equivalent restricted system of (1), the proposed observer (6) gives the same results when applied to (4).
where \(z\left( t \right) \) is the state vector of the observer, \({\hat{x}} \left( t \right) \) is the estimate of \(x\left( t \right) \), N, L and M are design matrices with appropriate dimensions. These matrices satisfy the following conditions:
where K is an introduced design matrix. Define the state estimation error as \(e=x-{\hat{x}} \) and the sensor fault estimation error as \({\tilde{f}} =f-{\hat{f}} \). Then, one has
Taking into consideration: \(\Delta \varphi \!=\!\varphi \left( {Hx,u} \right) -\varphi \left( {H{\hat{x}} ,u} \right) \), the dynamics of the state estimation error are governed by
From (8) and (9), one has: \(A-LC-N+NMC=0\), then
By introducing the following adaptation law, the possible sensor faults can be accurately estimated. The main theorem of this paper is then presented.
where \({\hat{f}} \left( t \right) \) is the estimate of the fault vector, \({\hat{y}} \left( t \right) \) is the estimate of the output vector and G is a design matrix.
Theorem 3.1
Consider the descriptor fractional-order system (4), under assumption 1, the observer (6) and the adaptation law (12). If there exist matrices \({\bar{K}} ,G\) and \(P=P^\mathrm{T}>0\) and positive scalars \(\tau _1 ,\tau _2 ,\varepsilon \) and \(\eta \) such that the LMI (13) is feasible under condition (14), then the error origin \(\left( {e,{\tilde{f}} } \right) =\left( {0,0} \right) \) is globally Mittag–Leffler stable.
where \({\bar{K}} =PK, X=2\left( {\tau _1 \rho +\tau _2 \beta } \right) H^\mathrm{T}H\) and \(Y=PD+\left( {\tau _2 \gamma -\tau _1 } \right) H^\mathrm{T}.\)
Proof
Previously in the paper, we have ensured that (5) is always satisfied by the “restricted system” transformation. Thus, the equation (7) has always a solution M. Consider the following Lyapunov function
Using Lemma 1 and condition (14), one can write for any time \(t\ge t_0 \):
Using the inequality (2) for any positive scalar \(\tau _1 \), one has
Similarly, for any positive scalar \(\tau _2 \), the inequality (3) yields
Now, using (16) and (17), one can obtain the following successions of bounds for \(^C D_{t_0 ,t}^\alpha V\left( t \right) \):
where
Then from (13), we have \(^C D_{t_0 ,t}^\alpha V\left( t \right) \!\le \! -\varepsilon \left[ {{\begin{array}{c} e \\ {{\tilde{f}} } \\ \end{array} }} \right] ^\mathrm{T}\left[ {{\begin{array}{c} e \\ {{\tilde{f}} } \\ \end{array} }} \right] \). Thus, using Theorem 2.1, \(\left( {e,{\tilde{f}} } \right) =\left( {0,0} \right) \) is globally Mittag–Leffler stable. This ends the proof. \(\square \)
Remark 3.1
For \(\alpha =1\) (the classical integer-order systems), this proof still remains correct, but the obtained result becomes the global exponential stability. Then, Theorem 3.1 is applicable for \(\alpha =1\), leading to the global exponential stability.
Remark 3.2
Condition (13) is satisfied if the following inequality holds (A necessary condition):
where \({\bar{K}} =PK\).
3.3 Recapitulation: final design procedure
A general and optimal framework is presented, so that the problem of estimating potential sensor faults for descriptor fractional-order systems of the form (1) can be achieved:
-
1.
Find the one-sided Lipschitz and the quadratic inner-boundedness constants \(\rho ,\beta \) and \(\gamma \), from conditions (2) and (3).
-
2.
Search the equivalent restricted system (4), if \(\hbox {rank}\left[ {{\begin{array}{c} {I-E^{*}} \\ C \\ \end{array} }} \right] \ne p\).
-
3.
Compute the matrix M from equation (7).
-
4.
Find the optimal solution (\({\bar{K}} ,P,\tau _1 ,\tau _2 )\) of the LMI (18), and then the optimal solution \(K=P^{-1}{\bar{K}} \).
-
5.
The solution K found in step 4 is rectified such that :
-
Condition (14) is verified.
-
The matrix F has the higher possible number of columns.
-
Inequality (18) is still valid (here, K is fixed from the beginning to verify (14), and the parameters \(P,\tau _1 \) and \(\tau _2 \) are to be computed; they are the variables of (18) in this step, and they are expected to compensate the variation of the matrix K, compared to the solutions found in step 4). Further information about the resolution of the problem {(14), (18)}, can be found in the simulation study section.
-
-
6.
Solve the LMI (13).
-
7.
With the final solution K, one can find the matrix N (from (8)), then the matrix L (from (9)) and have the estimates of sensor faults by means of the observer (6) and the adaptation law (12).
Remark 3.3
The number of sensor faults, which can be simultaneously estimated, is directly related to the number of columns in the matrix F. That is why step 5 of the design procedure takes into consideration the condition of a higher possible number of columns of F. Discussions, interpretations and further explanation in relation to this remark can be found in the simulation examples.
4 Simulation study
4.1 Example 1
Consider a fractional-order nonlinear descriptor system in the form of (1), with the following distribution matrices
The nonlinear part in (1) is taken: \(\varphi \left( {Hx,u} \right) =0.1\sin \left( {x_3 } \right) \), where \(x=\left[ {{\begin{array}{ccc} {x_1 }&{}\quad {x_2 }&{}\quad {x_3 } \\ \end{array} }} \right] ^\mathrm{T}\) is the state vector. This nonlinear function satisfies the one-sided Lipschitz and the quadratic inner-boundedness conditions (2) and (3) with \(\rho =0.1,\beta =0.01\) and \(\gamma =0\). In fact, the following inequalities hold
It is easy to verify that \(\hbox {rank}\left[ {{\begin{array}{c} {I-E^{*}} \\ C \\ \end{array} }} \right] =2\), then one takes \(R=I_3 \), and there is no need to search the equivalent restricted system (4). The matrix M, solution of (7), is computed: \(M=\left[ {{\begin{array}{cc} 1&{}\quad 0\\ 0&{}\quad 0\\ 0&{}\quad 0\\ \end{array} }} \right] \). Step 4 of the design procedure gives the following solution to the LMI (18): \(K=\left[ {{\begin{array}{cc} {-0.5}&{}\quad {6.1511}\\ {-4.1511}&{}\quad {-1.5} \\ 1&{}\quad 0 \\ \end{array} }} \right] \). For this numerical example, the plant has two measured outputs. Then, the most interesting is to try to estimate the two possible sensor faults simultaneously. To do it, the matrix F has to be a square two by two matrix, and we take \(F=\left[ {{\begin{array}{cc} 1&{}\quad 0 \\ 0&{}\quad 1 \\ \end{array} }} \right] \). Then, the outputs equation (the second equation in (1)) could be rewritten as follows:
With such a situation, in order to make equation (14) fulfilled, matrix K has to be set to zero. Then, the solution K found in step 4 is rectified in step 5 to \(K=0\). With this fixed matrix K, the inequality (18) (which is now a LMI with the variables \(P,\tau _1 \) and \(\tau _2 )\) is found feasible, with \(\tau _1 =\tau _2 =1.5936\) and
Then, the mathematical problem {(14), (18)} is solved.
Remark 4.1
For other simulation examples, the LMI (18), with the fixed matrix \(K=0\), could be unfeasible, meaning that all the sensor faults could not be estimated simultaneously. In such a case, a nonnull matrix K(rectified from the solution found in step 4) will make the negative term \(-{\bar{K}} C-C^\mathrm{T}{\bar{K}} ^\mathrm{T}\) appear in the inequality (18) (see (18)), and the appearance of this negative term will make (18) feasible. This remark is illustrated in example 2.
With the found parameters in step 5: \(P,K,\tau _1 \) and \(\tau _2 \), the LMI (13) can be solved. We find out: \(\eta =1.663,\varepsilon =0.1668\) and \(G=\left[ {{\begin{array}{cc} {1.3045}&{}\quad {-0.0246} \\ {-0.0246}&{}\quad {1.3117} \\ \end{array} }} \right] \). From (8), one can have \(N=A\), and then from (9), the matrix L is computed : \(L=AM=\left[ {{\begin{array}{cc} {-1}&{}\quad 0 \\ 0&{}\quad 0 \\ 1&{}\quad 0 \\ \end{array} }} \right] \). Thus, the observer (6) and the adaptation law (12) can be exploited.
For simulation, it is assumed that the two following constant sensor faults \(f_1 =7\) and \(f_2 =10\) occur at \(t=30\) s. The goal is to check whether the fault estimates will reach accurately \(f_1 \) and \(f_2 \). The fractional derivative order is set to \(\alpha =0.9\), and the simulation is done with the following initial conditions:
The true and the estimated sensor faults are depicted in Fig. 1. One can note from this figure the Mittag–Leffler convergence of the fault estimates.

Actual faults \(f_1 \) and \(f_2 \) and their estimates (example 1)

Actual fault and its estimate (example 2)
4.2 Example 2
Consider a fractional-order nonlinear descriptor system in the form of (1), with the following distribution matrices
The nonlinear part of the plant is \(\varphi \left( {Hx,u} \right) =0.1\sin \left( {x_1 } \right) \), where \(x=\left[ {{\begin{array}{cc} {x_1 }&{}\quad {x_2 } \\ \end{array} }} \right] ^\mathrm{T}\) is the state vector. We have \(\hbox {rank}\left[ {{\begin{array}{c} {I-E^{*}} \\ C \\ \end{array} }} \right] =2=p\), then one takes \(R=I_2 \), which means that: \(E=E^{*},A=A^{*},B=B^{*}\) and \(D=D^{*}\). Thus, (7) can be solved. Its solution is the following:
Step 4 of the design procedure gives the following solution to the LMI (18): \(K=\left[ {{\begin{array}{cc} {0.7}&{}\quad {-0.1} \\ {-0.3}&{}\quad {-1.1} \\ \end{array} }} \right] \). Moving to step 5, note that unlike example 1, it is impossible herein to make (18) feasible with a null matrix K. In other words, we cannot estimate two sensor faults simultaneously in this example. We aim to estimate the sensor fault affecting the second measured output, and we take \(F=\left[ {{\begin{array}{cc} 0&{}\quad 1 \\ \end{array} }} \right] ^\mathrm{T}\). With such a situation, the outputs equation could be rewritten as follows:
In order to have the feasibility of {(14),(18)} in step 5, the matrix K found in step 4 is rectified to:
With this fixed matrix K, (18) is found feasible with: \(\tau _1 =\tau _2 =1.479\) and
With the found parameters in step 5: \(P,K,\tau _1 \) and \(\tau _2 \), the LMI (13) can be solved. Solutions to (13) are found: \(\eta =1.5723,\varepsilon =0.1127\) and \(G=\left[ {{\begin{array}{cc} {0.0281}&{}\quad {0.4958} \\ \end{array} }} \right] \). From (8), one can have \(N=\left[ {{\begin{array}{cc} {-0.4}&{}\quad {-0.7} \\ {1.6}&{}\quad {-2.7} \\ \end{array} }} \right] \). Then from (9), the matrix L is computed : \(L=\left[ {{\begin{array}{cc} {0.54}&{}\quad {0.08} \\ {0.34}&{}\quad {-0.32} \\ \end{array} }} \right] \). Now, the observer (6) and the adaptation law (12) can be used.
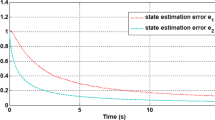
For simulation, it is assumed that the following constant sensor fault \(f=-3\) occurs at \(t=50\) s. The derivative order is set to \(\alpha =0.8\), and the simulation is done with the following initial conditions:
The actual and the estimated sensor fault are illustrated in Fig. 2. It can be clearly seen that the estimated sensor fault converges well to the actual one, in the Mittag–Leffler stability sense.
5 Conclusion
In this paper, a first scheme is proposed to estimate possible sensor faults for the general class of descriptor one-sided Lipschitz systems. The solution presented to solve this problem is efficient for both, integer-order and fractional-order systems. To do it, a convenient adaptation law and a LMI technique are used. A general and optimal design procedure is given, in order to more clarify the whole technique and to summarize the different steps of the work. This research study has the following limitation: the elaborated scheme is not always capable of estimating all the possible sensor faults simultaneously. This fact is due to the solvability of the mathematical constraints (14) and (18), which must be satisfied to obtain the desired Mittag–Leffler stability. This aspect has been further clarified and illustrated through two numerical simulation examples. In the first example, it has been shown that all the possible sensor faults can be estimated simultaneously, while in the second example, it is not the case. Both examples gave satisfactory results, confirming the validity of the whole theoretical findings.
References
Hu, Z.G., Zhao, G.R., Zhou, D.W.: Active fault tolerant control based on fault estimation. Appl. Mech. Mater. 635–637, 1199–1202 (2014)
Alwi, H., Edwards, C., Tan, C.P.: Fault Detection and Fault-tolerant Control Using Sliding Modes. Springer, Berlin (2011)
Naifar, O., Boukattaya, G., Ouali, A.: Robust software sensor with online estimation of stator resistance applied to WECS using IM. Int. J. Adv. Manuf. Technol. (2015). https://doi.org/10.1007/s00170-015-7753-3
Naifar, O., Makhlouf, A.B., Hammami, M.A.: On observer design for a class of nonlinear systems including unknown time-delay. Mediterr. J. Math. 13, 2841 (2016). https://doi.org/10.1007/s00009-015-0659-3
Naifar, O., Makhlouf, A.B., Hammami, M.A., Ouali, A.: State feedback control law for a class of nonlinear time-varying system under unknown time-varying delay. Nonlinear Dyn. 82, 349 (2015). https://doi.org/10.1007/s11071-015-2162-6
Gouta, H., Saïd, S.H., Barhoumi, N., M’Sahli, F.: Generalized predictive control for a coupled four tank MIMO system using a continuous-discrete time observer. ISA Trans. 67, 280–292 (2016)
Efimov, D., Zolghadri, A.: Optimization of fault detection performance for a class of nonlinear systems. Int. J. Robust Nonlinear Control 22(17), 1969–1982 (2012)
Mahmoud, M.S., Xia, Y.: Analysis and Synthesis of Fault Tolerant Control Systems. Wiley, New York (2014)
Kahkeshi, M.S., Sheikholeslam, F., Askari, J.: Adaptive fault detection and estimation scheme for a class of uncertain nonlinear systems. Nonlinear Dyn. 79, 2623–2637 (2014)
Abbazadeh, M., Marquez, H.J.: Nonlinear observer design for one-sided Lipschitz systems. In: Proceeding 2010 American Control Conference, Baltimore, USA, pp. 5284–5289 (2010)
Hu, G.D.: Observers for one-sided Lipschitz nonlinear systems. IMA J. Math. Control Inf. 23, 395–401 (2006)
Zhang, W., Su, H.S., Liang, Y., Han, Z.Z.: Non-linear observer design for one-sided Lipschitz systems: an linear matrix inequality approach. IET Control Theory Appl. 6, 1297–1303 (2012)
Karkhane, M., Pourgholi, M.: Adaptive observer design for one sided Lipschitz class of nonlinear systems. Modares J. Electr. Eng. 11, 45–51 (2012)
Engheta, N.: On fractional calculus and fractional multipoles in electromagnetism. IEEE Trans. Antennas Propag. 44(4), 554–566 (1996)
Dadras, S., Momeni, H.R.: A new fractional order observer design for fractional order nonlinear systems. In: Proceedings of ASME 2011 International Design Engineering Technical Conference and Computers and Information in Engineering Conference, Washington DC, USA, DETC2011-48861 (2011)
Dadras, S., Momeni, H.R.: Fractional sliding mode observer design for a class of uncertain fractional order nonlinear systems. In: Proceedings of the 50th IEEE Conference on Decision and Control and European Control Conference (CDC-ECC) (2011)
Naifar, O., Makhlouf, A.B., Hammami, M.A.: Comments on “Lyapunov stability theorem about fractional system without and with delay”. Commun. Nonlinear Sci. Numer. Simul. 30(1), 360–361 (2016)
Naifar, O., Makhlouf, A.B., Hammami, M.A.: Comments on “Mittag–Leffler stability of fractional order nonlinear dynamic systems [Automatica 45 (8)(2009) 1965–1969]”. Automatica 75, 329 (2017)
Jmal, A., Naifar, O., Derbel, N.: Unknown Input observer design for fractional-order one-sided Lipschitz systems. In: SSD conference, Marrakech, Morocco (2017)
Lan, Y.H., Li, W.J., Zhou, Y., Luo, Y.P.: Non-fragile observer design for fractional-order one-sided Lipschitz nonlinear systems. Int. J. Autom. Comput. 10(4), 296–302 (2013)
Lewis, F.L.: A survey of linear singular systems. Circuits Syst. Signal Process. 5, 3–36 (1986)
Darouach, M.: On the functional observers for linear descriptor systems. Syst. Control Lett. 61, 427–434 (2012)
Abbaszadeh, M., Marquez, H.J.: A generalized framework for robust nonlinear \(\text{ H }\infty \) filtering of Lipschitz descriptor systems with parametric and nonlinear uncertainties. Automatica 48(5), 894–900 (2012)
Liu, P., Yang, W.T., Yang, C.E.: Robust observer-based output feedback control for fuzzy descriptor systems. Expert Syst. Appl. 40(11), 4503–4510 (2013)
Zhang, H., Wu, D., Cao, J., Zhang, H.: Stability analysis for fractional-order linear singular delay differential systems. Discrete Dyn. Nat. Soc. 2014 (2014). https://doi.org/10.1155/2014/850279
Ji, Y., Qiu, J.: Stabilization of fractional-order singular uncertain systems. ISA Trans. 56, 53–64 (2015)
Zulfiqar, A., Rehan, M., Abid, M.: Observer design for one-sided Lipschitz descriptor systems. Appl. Math. Model. 40(3), 2301–2311 (2016)
Tian, J., Ma, S.: Reduced order \(\text{ H }\infty \) observer design for one-sided Lipschitz nonlinear continuous-time singular Markov jump systems. In: 35th Chinese Control Conference (CCC), pp. 709–714. IEEE (2016)
Gao, Z., Ho, D.W.: State/noise estimator for descriptor systems with application to sensor fault diagnosis. IEEE Trans. Signal Process. 54(4), 1316–1326 (2006)
Li, X., Zhu, F.: Simultaneous actuator and sensor fault estimation for descriptor LPV system based on \(\text{ H }\infty \) reduced order observer. Optim. Control Appl. Methods 37(6), 1122–1138 (2015)
Gupta, M.K., Tomar, N.K., Bhaumik, S.: Observer design for descriptor systems with Lipschitz nonlinearities: an LMI approach. Nonlinear Dynam. Syst. Theory 14(3), 292–302 (2014)
Kilbas, A.A., Srivastava, H.M., Trujillo, J.J.: Theory and Application of Fractional Differential Equations. Elsevier, New York (2006)
Podlubny, I.: Fractional Differential Equations. Academic Press, San Diego (1999)
Li, Y., Chen, Y.Q., Podlubny, I.: Mittag-Leffler stability of fractional order nonlinear dynamic systems. Automatica 45, 1965 (2009)
Duarte-Mermoud, M.A., Aguila-Camacho, N., Gallegos, J.A., Castro-Linares, R.: Using general quadratic Lyapunov functions to prove Lyapunov uniform stability for fractional order systems. Commun. Nonlinear Sci. Numer. Simul. 22, 650–659 (2015)
Rodrigues, M., Hamdi, H., Theilliol, D., Mechmeche, C., Braiek, BenHadj, N.: Actuator fault estimation based adaptive polytopic observer for a class of LPV descriptor systems. Int. J. Robust Nonlinear Control 25(5), 673–688 (2015)
Zhang, J., Swain, A.K., Nguang, S.K.: Robust \(\text{ H }\infty \) adaptive descriptor observer design for fault estimation of uncertain nonlinear systems. J. Franklin Inst. 351(11), 5162–5181 (2014)
Gupta, M.K., Tomar, N.K., Bhaumik, S.: Detectability and observer design for linear descriptor system. In: 22nd Mediterranean Conference on Control and Automation, pp. 1094–1098. IEEE (2014)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Jmal, A., Naifar, O., Ben Makhlouf, A. et al. Sensor fault estimation for fractional-order descriptor one-sided Lipschitz systems. Nonlinear Dyn 91, 1713–1722 (2018). https://doi.org/10.1007/s11071-017-3976-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-017-3976-1