
Abstract
In this paper, the dynamic stability of a simply supported beam excited by the transition of circulating masses is investigated by preserving nonlinear terms in the analysis. The intermittent loading across the beam results in a time-varying periodic equation. The effects of convective mass acceleration besides large deformation beam theory are both considered in the derivation of governing equations which is performed through adopting a variable-mass-system approach. In order to deal with the coupling between longitudinal and transversal deflections, the inextensibility assumption is implicitly introduced into the Hamiltonian formulation to reduce the model order. An appropriate interpretation is presented in order to maintain this approximation reasonable. Different semi-analytical methods are implemented to find the domains of stability and instability of the problem in a parameter space. By accounting the non-autonomous form of the governing equations, a qualitative change in behavior due to nonlinear terms is demonstrated which has not been addressed in previous studies.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Disregarding time-variant properties or nonlinear characteristics of vibrational systems may lead to improper results. Typical examples may include periodically loaded columns, cam-follower systems or bridge-type beams. In real-life situations, a lot of applications can be related to the beam–moving mass interaction problem and has consequently received much attention in the literature. Most studies on dynamic stability are lying in the linear domain [1,2,3]. On the other hand, nonlinear analysis permits to include all effects but poses mathematic challenges, which restrict researchers to focus on qualitative study of system behavior.
The dynamics of mass-beam interactions have been studied extensively in recent years due to its wide applications in many industrial fields such as machining processes [4], rifle dynamics [5], conveying pipelines [6], high-speed transportation on rails [7, 8], etc., but also due to its significance in the development of nonlinear science.
Adopting linear models for dynamic investigation of the beam under the action of moving loads can benefit from techniques such as double Laplace transform, Green’s functions, influence coefficients and modal superposition methods. Nonetheless, this first-order approximate approach may lead to erroneous predictions, resulting in undermined engineering designs. For instance, amplitude dependency of frequency and discontinuity in amplitude (jumps) are phenomena occurring exclusively in the nonlinear domain [9]. Moreover, linear models are not found apt to explore dynamic behaviors when the parameters (e.g., fluid velocity in conveying pipes) approach critical values, leading to dynamic bifurcation of the response [10].
In general, time-varying equations possess no analytic solution, even in the linear case, but useful properties can still be extracted for the sub-variety of periodic systems. Periodic systems exhibit interesting phenomena, involving different mechanisms of energy transfer including internal and parametric resonances [9]. In contrast to forced excited systems which rely on external sources of energy, internal resonance can induce vibrations via nonlinear modal couplings that occur at specific ratios between natural frequencies [11]. On the other hand, parametric resonance is usually considered in the context of self-energizing systems, possessing an inherent oscillatory character commensurate with system’s natural frequencies [12, 13].
Nonlinearity may arise in equations due to geometric terms such as mid-plane stretching and large beam curvature, inertia loading, material property or boundary conditions. In such situations, transverse displacements get coupled to the axial strains. In contrast to linear systems, a set of equilibrium states can cohabit in the phase plane with separate domains of attraction in the presence of nonlinearity. Moreover, maintaining nonlinearity in the analysis may lead to drastic changes in behavior like amplitude jumps or saturation, Hopf bifurcations and limit cycles, etc.
In contrast to nonlinearity which has roots in the physics of the system, time-dependency occurs as a simplifying assumption for lowering system’s degrees of freedom, imposed as prescribed motions and definite time-varying characteristics. Perturbation methods such as multiple scales, homotopy and averaging methods besides Floquet’s theory and incremental harmonic balance (IHB) are well-established tools for dealing with the subject.
Versatile sources of nonlinearity and different assumptions on the mass transition sequence and its acceleration pattern were considered in the literature. A number of studies addressed the dynamic problem by approximating the nonlinearity through cubic terms [14, 15]. Wang [16] considered a beam under the influence of an accelerating mass with all convective terms. In another study, the nonlinear behavior of the system was investigated as a parametrically excited system [17]. The occurrence of internal resonance under conditions of nearly commensurable frequencies was considered. Adams [18] considered a finite-length tensioned beam under consecutive moving loads. The coupling between tension and beam deflection led to nonlinearity. Critical velocities were found to occur at significantly lower speeds compared to single loading passage. Xu et al. [19] investigated the coupling between longitudinal and transverse motion in a beam–mass system, claimed to be insignificant, although without considering the vicinity of critical speeds. Wang and Chou [20] showed that neglecting the weight of the beam while studying the dynamics of large beam amplitudes under moving force may yield erroneous results and underestimation of the fundamental period of the structure. Wayou et al. [21] focused on the parametric resonance caused by the mutual effect of load inertia with large curvatures and mid-plane stretching. Siddiqui et al. [22] investigated large amplitude motion of a beam with a mass reciprocating along it, using a time-frequency technique to demonstrate parametric resonance at excitations close to twice the system’s natural frequencies. Pan et al. [23] examined local bifurcation behavior of a beam–mass system by the method of multiple scales and showed that mass velocity plays an important role in the system stability. Poorjamshidian et al. [24] employed the homotopy perturbation method to investigate the dependency of frequency on amplitude in a nonlinear beam. Adopting a quasi-static perspective for the mass motion put a question on the veracity and applicability of these two studies.
The above papers showed the abundant researches in the study of the vibration of beam–mass interaction. From the practical point of view, the linear theory is already sufficient, whereas the nonlinear dynamic study of such systems is nontrivial and motivating regarding unexplored phenomenological aspects. The present work encompasses the time-varying characteristics which appear due to non-negligible momentum effects induced by the moving mass motion. It is demonstrated that parametric resonance coupled with nonlinearity yields interesting aspects and plays an important role in stability investigations.

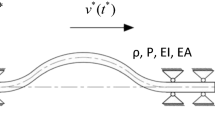
The beam–moving mass problem as a varying-mass system within a control volume
2 Model development
In this paper, the nonlinear dynamic behavior of a simply supported finite-length Euler–Bernoulli beam traversed by a moving mass sequence is considered. The consecutive transition of moving masses gives the system under study a varying mass characteristic, resulting to a so-called “open” system. Although the beam deforms within its linear elastic range and therefore Hooke’s law is prevailing, nonetheless nonlinearity is introduced by adapting nonlinear strain–displacement relations.
The following assumptions for the beam and the moving mass are considered:
-
1.
The mass, m, is assumed one order of magnitude lower than the beam mass and remains permanently in contact with the beam and traverses the beam from left to right with a constant velocity U.
-
2.
The elastic beam is uniform and inextensible with length l.
-
3.
The beam’s x-axis is assumed to pass through the centroid of the cross section and vibrations occur in the x–z plane.
2.1 Hamilton’s principle for open systems
In a control volume formulation viewpoint (open system), the consecutive entrances and exits of the masses across the beam are perceived as intermittent momentum transfer through its permeable boundaries, as depicted in Fig. 1. Such problems cannot be dealt with the conventional Hamilton’s principle since the set of particles involved is flowing across the boundaries and does not permit a system formulation approach [25].
The extended Hamilton’s principle [25] for a system of changing mass can be written as
where,
The Lagrangian of the system contained within the open control volume is denoted by \(\left( L \right) _{ \mathrm o} =\left( \mathrm{KE-PE} \right) _\mathrm{o} \) and \(\delta W\)is the virtual work performed by external forces on this system. Also \({{\varvec{u}}}={\mathrm{D}{{\varvec{r}}}}/{\mathrm{D}t}\) is the material time derivative of particle position vector, \({{\varvec{r}}}\), and \({{\varvec{V}}}_\mathrm{B} \) is the control surface velocity. \({{{\varvec{n}}}}\) is the normal vector on the differential surface element with area ds. In other term, the last expression in Eq. (2) may be thought of as a virtual momentum transport \(\left( {\rho _{m} {{\varvec{u}}}\cdot \delta {{\varvec{r}}}} \right) \) that occurs with a rate \(\left( {{{\varvec{V}}}_\mathrm{B} -{{\varvec{u}}}} \right) \cdot {{\varvec{n}}}\) across the open surface \({B}_\mathrm{o} \left( t \right) \). The virtual momentum transport at both ends due to mass entrance and exit takes part in the calculation as follows. It should be noted that the moving mass cannot suffer virtual displacement along its path due to its prescribed motion. The mass velocity at the beam extremities is \({{\varvec{u}}}={\dot{{\varvec{R}}}}+U{{\varvec{t}}}\) where \({{\varvec{R}}}\) and \({{\varvec{t}}}\) are the displacement and tangent unit vector at the beam ends, respectively. The transition rate across the surface boundaries is \(\left( {{{\varvec{u}}}-{{\varvec{V}}}_\mathrm{B} } \right) \cdot {{\varvec{n}}}=\pm U\). Thus, Eq. (2) eventually becomes
where the last expression denotes the virtual momentum transport across the control surface and mU represents the traffic flow at each instant.
For the case of a simply supported beam, there is no virtual displacement at both ends \(\left( {\delta {{\varvec{r}}}=0} \right) \). So, the right-hand side in Eq. (3) will vanish, but it has to be considered at the free end in case of a cantilever beam. This term would have been omitted if the conventional Hamilton’s principle had been used. Finally, applying the aforementioned consideration on Eq. (1) results in
2.2 Derivation of governing equations
Referring to Eq. (4) in order to obtain the governing differential equations of motion, Hamilton’s principle is applied on the system as follows
where C is introduced as a constraint in order to satisfy assumptions such as inextensibility.
Employing the von-Karman’s strain-displacement relation and setting the neutral axis strain equal to zero, the inextensibility assumption leads to the following constrained relation between the displacement field variables,
in which \(u=u\left( {x,t} \right) \) is the axial longitudinal displacement and \(v=v\left( {x,t} \right) \) is the transverse deflection of the beam. The prime stands for the derivative with respect to spatial coordinate \(\left( x \right) \). According to Eq. (6), v and u are of \(O\left( \varepsilon \right) \) and \(O\left( {\varepsilon ^{2}} \right) \), respectively. This fact will permit to simplify the analysis by only keeping terms up to \(O \left( {\varepsilon ^{4}} \right) \), as it is intentioned to deal with cubic terms in the equations, which leads to following expressions for kinetic and potential energy
where the moving mass velocity includes both convective and local components. \(\rho A\) denotes the mass per unit length and EI is the flexural stiffness.
The constraint of inextensibility is inserted as
where Lagrange multiplier, \(\lambda \left( {x,t} \right) \), has been introduced to enforce the inextensibility condition into the variational principle. By performing variational operations, the following expressions are extracted corresponding to arbitrary virtual variables, \({{\delta }} {{u}}\), \({{\delta }} {{v}}\) and \(\delta \lambda \):
\({{{\delta }} {{u}}}\):
with the following natural boundary condition
\({{{\delta }} {{v}}}\):
in addition to
which is automatically satisfied according to extremities physical conditions. Moreover, the variation on \(\lambda \) restitutes the constraint Eq. (4) represents the fourth derivative with respect to x.
In order to unify these equations in terms of one variable, one can first obtain the Lagrange multiplier \(\lambda \left( {x,t} \right) \) by integrating Eq. (10) on the interval \(\left[ {x, l} \right] \), and then combining with Eqs. (11) and (12), the following equation results in
where higher-order terms, according that m is assumed of \(O\left( \varepsilon \right) \), have been neglected.
It is worthy to interpret the terms that arose with Lagrange’s multiplier, namely \(\left( {\lambda \left( {1+{u}'} \right) } \right) ^{\prime }\) and \(\left( {\lambda {v}'} \right) ^{\prime }\), appearing in Eqs. (10) and (12). These terms represent the differential components of an axial distribution \(\lambda \left( {x,t} \right) \) along the differential beam element, projected on horizontal and vertical directions as shown in Fig. 2. This can be interpreted as a distributed force along the beam axis which is established to insure the constraint of inextensibility.
In what follows, another interpretation of this result is presented. Indeed, in order to reduce the problem dimension, variables u and v can be combined through enforcing the inextensibility condition, emphasizing that the beam does not elongate considerably during bending. By introducing a new set of variables \(\left( {\Delta l,v} \right) \) instead of \(\left( {u,v} \right) \), the inextensibility relation can now be expressed as \(\Delta l=0\) instead of the nonintegrable constraint of Eq. (6). Through this change of variables, the constrained Hamiltonian transforms into the expression\(\int {\left( {L+\lambda \Delta l} \right) } \mathrm{d}t\). Applying the variational operator leads to
where the term \(\delta \lambda .\Delta l\) will vanish according to the inextensibility constraint and the term \(\lambda .\delta \left( {\Delta l} \right) \) expresses the work done by an external force \(\lambda \) during the virtual increment on beam’s element length. This fact proposed that in order to fulfill the given constraint, an artificially “control force,” \(\lambda \), has to be purposely applied.

Schematic of the distributed force applied for satisfying the constraint of inextensibility
2.3 Finite-dimensional reduction
The Galerkin truncation method [26] is applied to reduce the partial differential governing equation to an ordinary one. For this purpose, the solution is expanded in terms of different modes as
where \(\bar{{q}}_i \left( t \right) \) is the generalized coordinate corresponding to the ith modal shape function \(\varphi _{i} \left( x \right) \). Notice that only those modal terms with wavelength much longer than the cross section dimension are valid to be included in this summation. Actually, in unsteady dynamic problems, the deformation propagation cannot be described correctly within the frame of Euler–Bernoulli beam theory. In fact, the speed of strain energy propagation tends to an infinite value for short wave length and will run faster than the deformation itself which is physically unacceptable. Disturbances creating short wavelength (compared to cross section dimensions) will cause large curvature of the elastic line and consequently large angular velocity and shear deformation will exhibit. The Euler–Bernoulli beam theory, where shear strain energy and rotational kinetic energy of cross sections are neglected, is thus not suitable for modeling such disturbances effects [27]. By paying attention to this fact, the frequency of mass transition across the beam should be so that the higher frequencies (causing wavelength shorter than the beam cross section) are not stimulated.
The modal functions which fulfill the essential boundary conditions of a simply supported beam can be defined by
Considering the orthogonality property of modal functions, the partial differential equation, Eq. (14), is transformed into a set of ordinary differential equations on the modal coordinates, expressed by
which, in the special case of one single mode, reduces to the following equation:
where the non-dimensional parameters are defined as
The parameter \(\varepsilon \) represents the mass ratio, also used as a small book-keeping parameter, and \(\gamma \) is introduced purposely to delineate the nonlinearity portion.
According to the intermittent loading of the beam, the coefficients are time-varying with periodicity \(T_p =l/U\). In order to reflect this fact, a Fourier expansion is applied on Eq. (19)
Indeed according to the intermittent passage of the masses, the term \(\sin \left( {{\pi x\left( t \right) }/l} \right) \) contains \(x\left( t \right) =Ut\) as a \(T_\mathrm{p}\)—periodic function which explains the above Fourier expansion.
3 Coexistence
Some differential equations with periodic coefficients feature resonance tongues in their stability parametric plane. Equation (21) represents a special case of Ince’s equation which turned out to exhibit such instability tongues [28]. In case \(\gamma =0\), the equation arises in the linear study of beam–mass interaction where the phenomenon of coexistence prevails as potential traps of instability [3]. In systems that exhibit coexistence, the two transition curves that would normally define a resonance tongue coincide and the tongue apparently closes up. Ng and Rand [28] added a nonlinear spring to the physical model of a thin elastica, permitting them to investigate the effects of nonlinearities on a system exhibiting coexistence. They found that quadratic terms in contrast to cubic terms can affect the stability of the origin.
In [3], the present authors studied the phenomenon of coexistence in a beam–moving mass system. They showed that satisfying the conditions for coexistence got challenged by the slightest variation in the model. By introducing a perturbing axial force \(\left( {p\cos \left( {2\tau } \right) } \right) \) to the model, condition for coexistence will no more subsist and extra instability regions will show up as finite faults [3]. Also as mentioned in the assumptions, the plausibility of separation between the moving mass and the supporting structure has to be verified in order that the model can describe the problem properly. Although the present problem has assumed that the vehicle will not lose contact, this constraint can indeed be realized in diverse cases such as a mass moving through a tube (bullet in rifle tube) or the lateral motion of a train which is restricted from both sides. In this regard, the weight can be omitted or neglected.
After including all mentioned effects, the homogeneous part of the governing equation reduces to the following form:
where \(K\buildrel \Delta \over = \delta \left( {p/{p_\mathrm{cr} }} \right) \) and \(p_\mathrm{cr} \buildrel \Delta \over = {\pi ^{2}\mathrm{EI}}/{l^{2}}\), while \(\mu \) is introduced to model damping effects.
4 Stability analysis
In order to investigate the significance of nonlinearity on the parametric resonance, considering that the solution of Eq. (22) would not differ too much from its linear counterpart, a first-order approximate solution of the governing equation is sought using the multi-scale expansion and averaging methods.
4.1 Multiple-scale perturbation
Following this approximation method, modulation equations on amplitude and phase of the response are obtained for querying stability conditions. For this purpose, by defining different time scales, \(T_i =\varepsilon ^{i}\tau , i=0, 1, 2, ...\) and corresponding partial derivatives, \(\mathrm{D}_{i} \buildrel \Delta \over = \partial /{\partial {T}_{i} }\), the expansion tools are developed accordingly:
Considering \(\varepsilon \) as sufficiently small, it is expected that nonlinear terms introduce extra and temporal variations in terms of \(\varepsilon \) superposed to the linear response
Substituting the expression into nonlinear Eq. (22) and reorganizing the terms in different powers of \(\varepsilon \), it will result
The zero-order equation is readily solved as
where \(\omega \buildrel \Delta \over = \sqrt{\delta }\). Upon substituting the above solution into the first-order equation, it results
where \(\mathrm{cc}\) stands for the complex conjugate of the preceding expression and \(\bar{{A}}\) stands for the complex conjugate of A.
To investigate the primary parametric resonance occurring around \(\omega \approx 1\), the following deviation is assumed
where \(\sigma \) is a detuning parameter.
Secular terms with respect to \({q}_{1} \) appearing on the right-hand side of (28) should be eliminated in order to make this equation solvable for \({q}_{1} \). Eliminating the secular terms yields
The above equation introduces a necessary condition for the complex amplitude A in order that a periodic solution of Eq. (28) may subsist. By substituting \(A=\frac{1}{2}a\exp (i\varphi )\) in Eq. (30), where \(a=a\left( {{T}_{1} } \right) \) and \(\varphi =\varphi \left( {{T}_{1} } \right) \) are slow-varying real functions, real and imaginary parts are separated and transformed as follows
where \(\left( {\prime } \right) \) indicates here derivation with respect to \({T}_{1} \).
The whole process leads to the approximate solution around the primary resonance in the form
where the variable \(\psi \buildrel \Delta \over = \sigma {T}_{1} -\varphi \) has been defined to make the modulation equations autonomous as follows
Notice that the nonlinearity (labeled by \(\gamma \)) has direct influence on the phase which in turn affects the amplitude subsequently.
The equilibrium state of above equation is reached by setting \({a}'={\psi }'=0\) which results in the nontrivial solution
Upon eliminating the variable \(\psi \) and recalling Eq. (33), the steady-state amplitudes of the response up to first order are obtained as
where \(\gamma _1 \buildrel \Delta \over = \gamma \pi ^{2}\left( {{\pi ^{2}}/3-{15}/8} \right) \).
4.2 Averaging method
In order to validate the perturbation analysis, the averaging method is applied as an adequate tool for investigating non-autonomous as well as nonlinear systems. For this purpose, the main equation, Eq. (22), has to be written in a format amenable to averaging:
where the nonlinear term for the present problem is obtained by a Taylor expansion with respect to \(\varepsilon \) obtained as
In the first step, a primary solution can be achieved by omitting nonlinear terms \(\left( {\varepsilon =0} \right) \) as
where a and \(\psi \) are arbitrary constants. An initial guess for the nonlinear solution \(\left( {\varepsilon \ne 0} \right) \) can be based on the same structure by treating these coefficients as slowly varying variables \(a\left( \tau \right) \) and \(\psi \left( \tau \right) \).
Having introduced two functions in place of one, a constraint equation is included as is usual [9]. Concisely, this leads to a system of equations:
Solving above equations algebraically to find \(\dot{a}\) and \(\dot{\psi }\) yields
Regarding that the variables rate is of order \(\varepsilon \), their time variation can be neglected in the right-hand side in the course of applying averaging method. By inspecting, one can distinct different averaged terms for cases \(\omega \ne 1\) and \(\omega =1\). For the non-resonance case \(\omega \ne 1\), it leads to
which indicates a decaying response. For \(\omega =1\), the averaged equation becomes
As it can be seen, the phase is a determining factor for the amplitude which necessitates to investigate the averaged equation for \(\psi \). As this status occurs around primary resonance\(\left( {\omega =1} \right) \), a detuning parameter is introduced purposely
Recalling that \(\delta \buildrel \Delta \over = \omega ^{2}=1-2\varepsilon \sigma +\varepsilon ^{2}\sigma ^{2}\), this will lead to an additional term \(2\sigma q\) in the expression for Q which will disappear in the averaging process on the equation governing amplitude but will bring additional terms in the phase equation:
These so-called slow flow equations will ultimately reach an equilibrium which corresponds to the steady-state periodic solutions of the main system.
One can achieve the nontrivial solutions by setting \(\dot{a}=\dot{\psi }=0\) in above equations which leads to
which is, by transforming \(\psi \rightarrow -\psi \), exactly the same expression presented in the previous section.
5 Solution analysis
In order for a solution to exist, it is necessary that the expression for \(a^{2}\) in Eq. (38) and that one appearing under the square root be positive, which implies
i.e., the restoring force has to be more than the damping to sustain a steady-state oscillation. In addition, multiple solutions for a may be reached according that
These conditions permit to differentiate multiple regions in the parameter plane. In the next subsection, the stability of plausible solutions occurring from those different regions is investigated. It is worthy to mention that for each singular fixed point corresponds a steady-state periodic solution for the main nonlinear equation.
It is through linearization about those equilibrium states that the stability conditions can be obtained, leading to the Jacobian matrix 

where the zero subscript denotes one of the equilibrium states. The corresponding eigenvalues are obtained as
In case \(\cos \left( {2\psi _0 } \right) >0\), the equilibrium state will be a stable node or focus while in the opposite case, a saddle point will appear. As one can verify for the multiple-solution case, the smaller amplitude solution becomes unstable, while the larger one remains stable. In the case of one single solution, the stability is readily concluded.
For further discussion, the steady-state amplitude equation is re-expressed as
where \(\hat{{\sigma }}\buildrel \Delta \over = \varepsilon \sigma \), \(\hat{{\gamma }}_1 \buildrel \Delta \over = \varepsilon \;\gamma _1 \), \(\hat{{\mu }}\buildrel \Delta \over = \varepsilon \mu \) are introduced purposely. For the sake of simplicity, the frequency of excitation is considered constant, while the tuning is performed on natural frequency around the primary resonance. Albeit reorienting the expression in terms of the frequency of excitation is also plausible.
For a given pair \(\left( {\hat{{\mu }},\hat{{\gamma }}_1 } \right) \), the boundary curves obtained from the conditions described in Eqs. (52–53), namely \(\hat{{\sigma }}=-\varepsilon \pm \frac{1}{4}\sqrt{\left( {\varepsilon K} \right) ^{2}-\left( {4\hat{{\mu }}} \right) ^{2}}\) and \(\varepsilon ={4\hat{{\mu }}}/K\), divide the \(\varepsilon -\hat{{\sigma }}\) plane into three separated regions, as shown in Fig. 3. It appears that above-mentioned boundaries are independent of the nonlinear coefficient term \(\hat{{\gamma }}_1 \) which implies that the stability chart will not change for the linear counterpart problem. Indeed, in the absence of nonlinearity, such stability diagrams have already been revealed and sketched in terms of different variables [3]. However, the system’s behavior is surely impacted by nonlinearity as will be shown next.

Solution regions in the plane of parameters

Frequency response of the nonlinear system around \(\omega =1\)
In contrast to linear systems where stability is not amplitude dependent, the nonlinear system appears to behave differently with respect to amplitude. In region I, an initial disturbance may lead to a periodic response or will decay, in contrast to the linear system which would have decay regardless of initial conditions. In region II, although the response of the linear system to initial disturbances seems to grow without bound, nonetheless the nonlinear response becomes ultimately bounded. According to the amplitude dependency of frequency, the system will detune from resonance as amplitude grows and consequently remains bounded. It appears that all solutions converge to rest in region III.
6 Numerical verification and physical interpretation
Let us assume a unilateral variation of parameter \(\hat{{\sigma }}\) while holding \(\varepsilon \) constant. As can be seen in Fig. 4, a trivial solution and a large amplitude oscillatory solution coexist between \(\mathrm{A}_{1} \) and \(\mathrm{A}_{2} \), whose realization depends on the frequency sweeping direction. Further increase of the detuning parameter destabilizes the trivial solution toward the other branch leading to a jump in amplitude (\(\mathrm{A}_{2} -{\mathrm{A}}'_{2} )\). The unified solutions continuously decrease until settling to absolute zero amplitude; no steady oscillatory solution is sustainable beyond \(\mathrm{A}_{3} \).
In Fig. 5, this aforementioned fact has been given a time domain interpretation by performing simulations on the moving mass system with selected parameters as follows, \(\varepsilon =0.01\), \(\mu =0.1\) and \(\gamma =1\). The simulation represents the system response as the frequency is swept gradually and intentionally kept on at each step until a steady-state is reached. The envelope of these oscillations shows similarity with the \(\left( {\mathrm{A}_1 -\mathrm{A}_2 -{\mathrm{A}}'_2 -\mathrm{A}_3 } \right) \) path in Fig. 4, as expected. Furthermore, the jump of amplitude \(a\approx 0.5\) at \(\sigma =-1.21\) appearing in both Figs. 4 and 5 verifies the veracity of the analysis.

Time history illustrating jump in amplitude for a mass ratio of \(\varepsilon =0.01\) while detuning frequency upward

Time history illustrating amplitude growth for a mass ratio of \(\varepsilon =0.01\) while detuning frequency downward

Variation of amplitude illustrating jumps with respect to mass ratio

a Transition of the beam oscillations toward its steady state, b alternation of the normalized contact force in the same period
A similar numerical analysis is performed on the same system by reversing the sweeping direction, as shown in Fig. 6. It is obvious that one should not expect to return to the previous trend as the jump phenomenon is not a reversible process.
In Fig. 7, the amplitude of steady oscillation, a, is sketched versus the mass ratio parameter \(\varepsilon \) while keeping the detuning parameter constant. As seen, the jump phenomenon occurs upon reaching stable/unstable solution boundaries.
By steadily increasing the parameter, no pertinent solution subsists up to \(\mathrm{B}_{3} \) (only trivial solution); upon passing through this point, the trivial solution becomes unstable and jumps to a finite amplitude at \({\mathrm{B}}'_{3} \). Notice that the aforementioned jump concerns the steady part of the solution and any transition of amplitude across the discontinuity actually happens through a transient oscillation. Further increase will result in gradually decrement of the response till a zero amplitude is reached which will persist beyond \(\mathrm{B}_{4} \). A similar trend is experienced in the reverse process when \(\varepsilon \) is decreased. The amplitude increases along curve \(\hbox {DB}_{3}^{\prime } \hbox {C}\) past point \(\hbox {B}_{3}^{\prime } \) without falling down to point \(\hbox {B}_{3} \). Upon reaching point C, further decrease in \(\varepsilon \) causes the amplitude to settle back to zero at point \(\hbox {B}_{2}\), beyond which no multi-valued region subsists.
As maintained, the mass is assumed restricted to remain in contact with the beam through some guideway. With this condition, the contact force alternation from one side to the other will be extracted and verified numerically as follows:
where N is denoted as the contact force. Upon substituting the solution \(v\left( {x,t} \right) =\sqrt{\varepsilon }lq\left( t \right) \sin \left( {{\pi x}/l} \right) \) where \(q\left( t \right) \) is replaced from Eq. (41), it yields at steady state to the following expression
which depicts a sinusoidal function of amplitude \({2\pi ^{2}mU^{2}\sqrt{\varepsilon }a}/l\). As intuitively perceived, the contact force alternates twice as fast as the beam oscillation and there is a phase shift between the beam deflection and the contact force. Next, the numerical solution of Eq. (57) will be compared to the expression obtained in Eq. (58) with parameters set as \(\left( {\varepsilon =0.01,\;\sigma =-1,\;\mu =0.1,\;\gamma =1} \right) \). Figure 8a, b illustrates the transition of the beam oscillations toward its steady state and the alternation of the normalized contact force \(\left( {N^{*}={Nl}/{\pi ^{2}\sqrt{\varepsilon }mU^{2}}} \right) \), respectively. As shown in Fig. 8b, the amplitude perfectly matches with the formula obtained in Eq. (58) and indicates a twofold frequency compared to Fig. 8a as expected.
7 Conclusion
The vibrational motion of a simply supported beam across which a concentrated mass is moving periodically is investigated through both multi-scale perturbation and averaging methods. The governing equations are obtained by considering the model as an open system with permeable boundaries using the extended Hamilton’s principle. In order to reduce the model order, a Lagrange multiplier is introduced to enforce the inextensibility condition as a constraint. Time-varying as well as nonlinear terms are taken into account in the analysis. The occurrence of jump phenomena which is an important aspect of nonlinear vibration is found as a feature of this system. Results of perturbation analyses show that nonlinear terms do not affect the instability boundary curves in the parametric plane but as predictable, restrict the response near resonance according to its amplitude-dependent frequency characteristic. This fact causes the resonance to detune and the amplitude is no more predisposed to grow, consequently. The correspondence of the time sweeping amplitude envelope with the frequency response near resonance indicates a good agreement between theoretical and numerical methods.
References
Ouyang, H.: Moving-load dynamic problems: a tutorial (with a brief overview). Mech. Syst. Signal Process. 25(6), 2039–2060 (2011)
Pirmoradian, M., Keshmiri, M., Karimpour, H.: Instability and resonance analysis of a beam subjected to moving mass loading via incremental harmonic balance method. J. Vibroeng. 16(6), 2779–2789 (2014)
Karimpour, H., Pirmoradian, M., Keshmiri, M.: Instance of hidden instability traps in intermittent transition of moving masses along a flexible beam. Acta Mech. 227(4), 1213–1224 (2016)
Shiau, T.N., Huang, K.H., Wang, F.C., Hsu, W.C.: Dynamic response of a rotating multi-span shaft with general boundary conditions subjected to a moving load. J. Sound Vib. 323(3–5), 1045–1060 (2009)
Esen, I., Koç, M.A.: Dynamic response of a 120 mm smoothbore tank barrel during horizontal and inclined firing positions. Lat. Am. J. Solids Struct. 12(8), 1462–1486 (2015)
Yau, J.D., Yang, Y.B.: Vibration of a suspension bridge installed with a water pipeline and subjected to moving trains. Eng. Struct. 30(3), 632–642 (2008)
Ju, S.H.: Nonlinear analysis of high-speed trains moving on bridges during earthquakes. Nonlinear Dyn. 69(1), 173–183 (2012)
Mazilu, T.: Instability of a train of oscillators moving along a beam on a viscoelastic foundation. J. Sound Vib. 332(19), 4597–4619 (2013)
Nayfeh, A.H., Mook, D.T.: Nonlinear Oscillations. Wiley, New York (1979)
Zhang, Y.L., Chen, L.Q.: Internal resonance of pipes conveying fluid in the supercritical regime. Nonlinear Dyn. 67(2), 1505–1514 (2012)
Siddiqui, S.A.Q., Golnaraghi, M.F., Heppler, G.R.: Dynamics of a flexible cantilever beam carrying a moving mass. Nonlinear Dyn. 15(2), 137–154 (1998)
Pirmoradian, M., Keshmiri, M., Karimpour, H.: On the parametric excitation of a Timoshenko beam due to intermittent passage of moving masses: instability and resonance analysis. Acta Mech. 226(4), 1241–1253 (2015)
Wang, Y.M.: The dynamics of a beam-mass system due to the interaction between the initial curvature of the beam and the existence of parametric resonance under primary resonance. J. Solid Mech. Mater. Eng. 3(4), 698–709 (2009)
Hryniewicz, Z., Kozioł, P.: Wavelet-based solution for vibrations of a beam on a nonlinear viscoelastic foundation due to moving load. J. Theor. Appl. Mech. 51(1), 215–224 (2013)
Mamandi, A., Kargarnovin, M.H.: Dynamic analysis of an inclined Timoshenko beam traveled by successive moving masses/forces with inclusion of geometric nonlinearities. Acta Mech. 218(1), 9–29 (2011)
Wang, Y.M.: The dynamical analysis of a finite inextensible beam with an attached accelerating mass. Int. J. Solids. Struct. 35(9–10), 831–854 (1998)
Wang, Y.M.: The dynamic analysis of a beam-mass system due to the occurrence of two-component parametric resonance. J. Sound. Vib. 258(5), 951–967 (2002)
Adams, G.G.: Critical speeds and the response of a tensioned beam on an elastic foundation to repetitive moving loads. Int. J. Mech. Sci. 37(7), 773–781 (1995)
Xu, X., Xu, W., Genin, J.: A nonlinear moving mass problem. J. Sound Vib. 204(3), 495–504 (1997)
Wang, R.T., Chou, T.H.: Nonlinear vibration of Timoshenko beam due to a moving force and the weight of beam. J. Sound Vib. 218(1), 117–131 (1998)
Wayou, A.N.Y., Tchoukuegno, R., Woafo, P.: Nonlinear dynamics of an elastic beam under moving loads. J. Sound Vib. 273(4–5), 1101–1108 (2004)
Siddiqui, S.A.Q., Golnaraghi, M.F., Heppler, G.R.: Dynamics of a flexible beam carrying a moving mass using perturbation, numerical and time frequency analysis techniques. J. Sound Vib. 229(5), 1023–1055 (2000)
Pan, L., Qiao, N., Lin, W., Liang, Y.: Stability and local bifurcation in a simply-supported beam carrying a moving mass. Acta Mech. Solida Sinica 20(2), 123–129 (2007)
Poorjamshidian, M., Sheikhi, J., Mahjoub-Moghadas, S., Nakhaie, M.: Nonlinear vibration analysis of the beam carrying a moving mass using modified homotopy. J. Solid Mech. 6(4), 389–396 (2014)
McIver, D.B.: Hamilton’s principle for systems of changing mass. J. Eng. Math. 7(3), 249–261 (1973)
Ding, H., Chen, L.Q., Yang, S.P.: Convergence of Galerkin truncation for dynamic response of finite beams on nonlinear foundations under a moving load. J. Sound Vib. 331, 2426–2442 (2012)
Flügge, W.: Die Ausbreitung von Biegewellen in Stäben. Zeitschrift für Angewandte Mathematik und Mechanik (ZAMM) 22(6), 312–318 (1942)
Ng, L., Rand, R.: Nonlinear effects on coexistence phenomenon in parametric excitation. Nonlinear Dyn. 31(1), 73–89 (2003)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Pirmoradian, M., Karimpour, H. Parametric resonance and jump analysis of a beam subjected to periodic mass transition. Nonlinear Dyn 89, 2141–2154 (2017). https://doi.org/10.1007/s11071-017-3575-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-017-3575-1