
Abstract
This paper considers a stochastic predator–prey model with hyperbolic mortality and Holling type II response. Firstly, we show that there is a critical value which can easily determine the extinction and persistence in the mean of the predator population. Then by constructing appropriate Lyapunov functions, we prove that there is a stationary distribution to this model and it has the ergodic property. Finally, a numerical example is introduced to illustrate the results developed.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
In the ecological sciences, the dynamical behavior of predator and its prey has long been and will continue to be one of the dominant themes in both ecology and mathematical ecology due to its universal existence and importance [1]. Since Lotka Volterra’s pioneering work on population dynamics, various predator–prey models have been presented and studied widely by both applied mathematicians and ecologists [2–9]. There are a number of different functional responses used to model predator–prey interaction, such as Beddington–DeAngelis type, Hassell–Varley type, Holling–Tanner type and Holling II, III, IV types. The general predator–prey model with Holling type II response has the following form [7, 8]:
where x and y are the population densities of prey and predator, respectively; r is the birth rate, K is the carrying capacity, and a is the maximum uptake rate of the prey; b is the prey density at which predator has the maximum kill rate; m is the birth rate and function h(y) reflects the mortality rate of the predator. Mortality rate of the predator is also essential in population dynamics. Note that when h(y) is linear, model (1) is the classic Holling type II predator–prey model. According to [7], taking
model (1) (after dropping the tildes) becomes
where \(h(v)=\frac{\gamma v^2}{1+\gamma v}\) for hyperbolic mortality, which dominates the mortality when population density is large [10]. Model (2) has always three equilibria, which consist of two boundary equilibria (0, 0) and (1, 0), and a nontrivial stationary state \((u^*, v^*)\) where \(u^*=\frac{(\beta \gamma -s-\beta ^2\gamma )+\sqrt{4\beta ^3\gamma ^2+(\beta \gamma -s-\beta ^2\gamma )^2}}{2\beta \gamma }\), \(v^*=\frac{u^*}{\beta \gamma }\). In this case of hyperbolic mortality, \((u^*, v^*)\) always exists, and it is locally asymptotically stable if \(0<sv^*-(\beta +u^*)^2<\alpha \beta \).
However, in the real life situations, population systems are always affected by environmental noise. May [11] pointed out that due to continuous fluctuation in the environment, the birth rates, death rates, carrying capacity, competition coefficients and all other parameters involved with the model exhibit random fluctuation to a great lesser extent. Up to now, stochastic population systems have been studied by many authors [12–20]. In this paper, we assume that environmental white noises are directly proportional to u(t) and v(t). This approach has been used by many literature, see, e.g., [12, 21]. In this way, predator–prey model with hyperbolic mortality in random environments will be deduced to the form:
where \(B_1(t)\), \(B_2(t)\) are mutually independent Brownian motions defined on a complete probability space \(({\varOmega }, \mathcal {F}, \{\mathcal {F}_{t}\}_{t\ge 0}, \mathcal {P})\) with a \(\sigma -\)field filtration \(\{\mathcal {F}_{t}\}_{t\ge 0}\) satisfying the usual conditions, and positive constants \(\sigma _1^2\), \(\sigma _2^2\) are intensities of the white noises.
The aim of this paper is to study the dynamical behavior of model (3). In the study of a population dynamics, global asymptotic stability of the positive equilibrium is an important topic. However, stochastic model (3) has no positive equilibrium. Therefore, it is impossible for the solution of model (3) tending to a fixed point. In this paper, we will show that model (3) has an ergodic stationary distribution mainly according to the theory of Has’minskii [22], if the white noises are small. The stationary distribution can be considered as a weak stability. The method adopted here is constructing new Lyapunov functions and rectangular set, which do not depend on the equilibrium \((u^*,v^*)\) of the deterministic model (2). Furthermore, we try to find the critical value between the extinction and persistence of predator population and analyze how the environmental noises affect the population dynamics.
2 Preliminaries
For simplicity, we introduce the following notations.
\(\mathbb {R}_+^2:=\{x=(x_1,x_2)\in \mathbb {R}^2:x_i>0, i=1,2\}\).
\(\langle f\rangle _t=\frac{1}{t}\int _{0}^{t}f(s)d s. \)
If g(t) is a bounded function on \([0,\infty )\), define \(\check{g}=\sup _{t\in [0,\infty )}g(t)\).
Lemma 1
[15] Suppose that \(Z(t)\in C({\varOmega }\times [0,\infty ),\mathbb {R}_+)\).
-
(I)
If there are two positive constants T and \(\delta _0\) such that
$$\begin{aligned} \ln Z(t)\le \delta t-\delta _0\int _{0}^{t}Z(s)d s+\sum _{i=1}^{n}\alpha _i B(t)\ a.s. \end{aligned}$$for all \(t>T\), where \(\alpha _i\), \(\delta \) are constants, then
$$\begin{aligned} \left\{ \begin{array}{ll} \limsup _{t\rightarrow \infty }\langle Z\rangle _t\le \frac{\delta }{\delta _0}\ a.s.,&{}\quad \mathrm {if}\ \delta \ge 0;\\ \lim _{t\rightarrow \infty }Z(t)=0\ a.s.,&{}\quad \mathrm {if}\ \delta < 0.\\ \end{array} \right. \end{aligned}$$ -
(II)
If there exist three positive constants T, \(\delta \), \(\delta _0\) such that
$$\begin{aligned} \ln Z(t)\ge \delta t-\delta _0\int _{0}^{t}Z(s)d s+\sum _{i=1}^{n}\alpha _i B(t)\ a.s. \end{aligned}$$for all \(t>T\), then \(\liminf _{t\rightarrow \infty }\langle Z\rangle _t\ge \frac{\delta }{\delta _0}\ a.s..\)
Lemma 2
For any initial value \((u(0),v(0))\in \mathbb {R}_+^2\), there is a unique positive solution (u(t), v(t)) of model (3) on \(t\ge 0\), and the solution will remain in \(\mathbb {R}_+^2\) with probability 1. Moreover, there is a constant K such that
Proof
Define a \(C^2\)-function \(V:\mathbb {R}_+^2\rightarrow \mathbb {R}_+\) as follows:
Applying Itô’s formula, we have
where \(K_0\) is a positive constant. Following the proof of the remainder of Theorem 2.1 in [23], we obtain that model (3) admits a unique global positive solution \((u(t),v(t))\in \mathbb {R}_+^2\) for any initial value \((u(0),v(0))\in \mathbb {R}_+^2\).
Now we are in the position to prove (4). Define a Lyapunov function
Applying Itô’s formula, we obtain
where for \((u,v)\in \mathbb {R}_+^2\) and \(t\ge 0\),
Then we can deduce that there exists a constant \(K_1>0\) such that
Hence
which yields the desired assertion (4). \(\square \)
3 Discussion on the persistence and extinction
In this section, we will try to give the critical value which determines the extinction and persistence of stochastic predator–prey model (3) with hyperbolic mortality. To this end, we quote some concepts and lemmas.
Definition 1
[15]
-
(1)
If \(\lim _{t\rightarrow \infty }v(t)=0\) a.s., then species v(t) is said to be extinctive almost surely.
-
(2)
If \(\liminf _{t\rightarrow \infty }\langle v\rangle _t>0\) a.s., then model (3) is said to be persistent in the mean.
Lemma 3
[16] Consider the following one-dimensional stochastic system
with \(X(0)=u(0)\).
-
If \(1-\frac{\sigma _1^2}{2}<0\), then \(\lim _{t\rightarrow \infty }X(t)=0\), a.s.
-
If \(1-\frac{\sigma _1^2}{2}>0\), then
$$\begin{aligned} \lim _{t\rightarrow \infty }\frac{1}{t}\int _{0}^{t}X(s)d s=1-\frac{\sigma _1^2}{2},\ \ a.s. \end{aligned}$$(6)Furthermore, if \(1-\frac{\sigma _1^2}{2}>0\), system (5) has a unique ergodic stationary distribution \(\nu (\cdot )\) with stationary density \(\mu (x)=Cx^{\frac{2-\sigma _1^2}{\sigma _1^2}-1}e^{-\frac{2}{\sigma _1^2}x}\), where \(C=(2/\sigma _1^2)^{(2-\sigma _1^2)/\sigma _1^2}/{\varGamma }((2-\sigma _1^2)/\sigma _1^2)\), and
$$\begin{aligned}&\mathbb {P}\left\{ \lim _{t\rightarrow \infty }\frac{1}{t}\int _{0}^{t}f(X(s))\mathrm{d} s=\int _{\mathbb {R_+}}f(x)\mu (x)\mathrm{d}x\right\} \\&\quad =1, \end{aligned}$$where f is a function integrable with respect to the measure \(\nu \).
Remark 1
From stochastic comparison theory it follows that \(u(t)\le X(t), a.s.\).
Theorem 1
Assume that \(1-\frac{\sigma _1^2}{2}>0\). Let \(\lambda _1:=-\frac{\sigma _2^2}{2}+\alpha \int _{0}^{\infty }\frac{x}{\beta +x}\mu (x)d x\) and u(t), v(t) be a positive solution of model (3) with initial value \((u(0),v(0))\in \mathbb {R}_+^2\).
-
(i)
If \(\lambda _1<0\), then the predator populations go to extinction a.s..
-
(ii)
If \(\lambda _1>0\), then model (3) will be persistent in the mean.
Proof
(i). An application of Itô’s formula to the second equation of (3) shows that
Integrating above inequality from 0 to t and dividing t on both sides, we get
where \(M_2(t)=\int _{0}^{t}\sigma _2\mathrm{d}B_2(t)\) is a real-valued continuous local martingale. By strong law of large numbers [24], we have \(\lim _{t\rightarrow \infty }\frac{M_2(t)}{t}=0 \ a.s.\). Taking the superior limit on both sides of inequality (7) and then using Lemma 3 we obtain
Obviously, the predator v(t) goes to extinction when \(\lambda _1<0\).
(ii). Applying Itô’s formula to the first equation of (3) and (5), respectively, we have
and
where \(M_1(t)=\int _{0}^{t}\sigma _1\mathrm{d} B_1(r)\) also has the property \(\lim _{t\rightarrow \infty }\frac{M_1(t)}{t}=0\) a.s. From the above two equations it follows that
which implies that
Applying Itô’s formula to the second equation of (3) again we have
Substituting (8) into (9) and combining Lemma 3, we obtain that
for sufficiently large t. Applying (II) in Lemma 1 and the arbitrariness of \(\varepsilon \), one can derive that
That is to say model (3) will be persistent in the mean when \(\lambda _1>0\). The proof is complete. \(\square \)
Remark 2
From Theorem 1, we can see that \(\lambda _1\) is the critical value between persistence in the mean and extinction for predator v(t). Furthermore, combining Lemma 3, we obtain that \(\lim _{t\rightarrow \infty }\langle u\rangle _t=1-\frac{\sigma _1^2}{2}\), \(\lim _{t\rightarrow \infty }v(t)=0\) a.s. when \(\lambda _1<0\).
Remark 3
Lemma 3 and Theorem 1 show that the two species will die out if \(1-\frac{\sigma _1^2}{2}<0\). That is to say, large white noise intensity \(\sigma _1^2\) can cause the species extinction. On the other hand, model (3) will be persistent in the mean if the white noise disturbances are small enough such that \(1-\frac{\sigma _1^2}{2}>0\) and \(\lambda _1>0\).
4 Existence of ergodic stationary distribution
Using the theory of Has’minskii [22] (see “Appendix”) and the Lyapunov function method, in this section, we prove that when the noises are small enough, model (3) has a stationary distribution which is ergodic.
Theorem 2
Assume that
then there exists a stationary distribution \(m(\cdot )\) for model (3) and it has the ergodic property:
Proof
In order to prove Theorem 2, it suffices to verify Assumptions (B1) and (B2) in “Appendix.” To verify (B2), it suffices to prove that there exist a neighborhood \(U\subset \mathbb {R}_+^2\) and a nonnegative \(C^2\)-function V such that for any \((u,v) \in \mathbb {R}_+^2\setminus U\), \(\mathcal {L}V\) is negative (see [25]).
Define a \(C^2\)-function
here \(\theta \in (0,1)\), K and M are constants satisfying the following condition, respectively,
and positive constant C, functions f(x), g(x) will be determined later. It is not difficult to see that there exists a unique point \((u_0,v_0)\) which is the minimum point of h(u, v). Define a nonnegative \(C^2\)-Lyapunov function
Denote
Direct calculations imply that
where \(F(v)=\gamma \left( K-\frac{s}{\beta }\right) v^2-\left( \gamma (\beta \!+\!1)\!+\!\frac{s}{\beta }-\lambda \gamma \right) v+\lambda \). Note that \(\left( \gamma (\beta +1)+\frac{s}{\beta }-\lambda \gamma \right) ^2-4\lambda \gamma \left( K-\frac{s}{\beta }\right) <0\) when condition (11) holds. This implies that \(F(v)>0\) for all \(v\in (0,\infty )\). Therefore, define a positive constant \(C=\inf _{v\in (0,\infty )}\frac{F(v)}{1+\gamma v}\), then one derives
Also
where
It is not difficult to obtain
Applying inequalities \(0<\theta <1\) and \(\frac{\sigma _2^2}{2\alpha }<1\) we obtain
which implies
Therefore
where M satisfies
Now we are in the position to construct a bounded set \(U\subset \mathbb {R}_+^2\) such that \(\mathcal {L}V\le -1\), \((u,v)\in \mathbb {R}_+^2-U\). Consider the following bounded subset
where \(\varepsilon _1\), \(\varepsilon _2\in (0,1)\) are sufficiently small positive constants satisfying the following inequalities
where inequalities (17) and (18) can be derived from (16), and the constants \(\rho \), \(C_1\), \(C_2\) and \(\check{g}_1\) will be determined later. Then
with
Case 1 If \((u,v)\in U_1^c\), (17) implies that
Case 2 If \((u,v)\in U_2^c\), we obtain that
Choosing \(\varepsilon _1=\varepsilon _2^2\) and combining (18), we have
Case 3 If \((u,v)\in U_3^c\), we have
which follows from (19), where
in which \(\rho \) is sufficiently small positive constant such that \(\frac{\theta }{2}\sigma _2^2\left( \frac{s}{\alpha }\right) ^{\theta +1}<s\left( \frac{s}{\alpha }\right) ^{\theta }-\rho \).
Case 4 If \((u,v)\in U_4^c\), it follows that
where
and
which together with (20) imply that
From the above discussion it follows that
On the other hand, in order to verify Assumption (B1), we only need to show that (21) holds. The diffusion matrix of model (3) is
It is not difficult to see that there exists a \(c >0\) such that
for \((u,v)\in \bar{U}\) and \(\xi \in \mathbb {R}_+^2\). That is to say, Assumption (B1) holds. Consequently, model (3) has a stationary distribution \(m(\cdot )\) and it is ergodic.
Following the proof of the remainder of Theorem 2.1 in [15] and (4), we can get the ergodic property (10). The proof is complete. \(\square \)
Remark 4
There is no positive equilibrium for stochastic model (3). Hence we cannot show the permanence of the stochastic model by proving the stability of the positive equilibrium as the deterministic model. Theorem 2 shows that model (3) has an ergodic stationary distribution if the white noise is small. The stationary distribution can be considered as a stability of the model in weaksense, which appears as the solution is fluctuating in a neighborhood of the equilibrium point of the corresponding deterministic model. Theorem 2 also shows that small white noise can make model permanent.
Remark 5
According to the theory of Has’minskii, to prove the existence of the stationary distribution, it is critical to construct a bounded domain U and a nonnegative \(C^2\)-function V such that \(\mathcal {L}V\) is negative outside U. Here we construct a new Lyapunov function and a rectangular set which do not depend on the equilibrium \((u^*,v^*)\) of the deterministic model (2). From the ergodic property (10) it follows that the solution of model (3) tends to a fixed positive point in the sense of time average with probability one.
5 Numerical example
In this section, in order to illustrate the results developed, we introduce a numerical example. Using Milstein’s higher-order method [26], we get the discretization equation:
where time increment \({\varDelta } t>0\), and \(\xi _k\), \(\eta _k\) are N(0, 1)-distributed independent random variables.
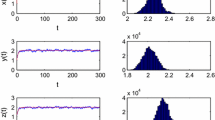
In model (3), let \(s=0.5\), \(\alpha =1.48\), \(\beta =0.4\), \(\gamma =2\), \(\sigma _1=0.1\), \(\sigma _2=0.2\), \(u(0)=0.6\), \(v(0)=0.8\). Then the nontrivial stationary state of the corresponding deterministic model (2) is \((u^*, v^*)=(0.6306,0.7907)\). Notice that
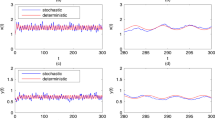
Theorem 2 shows that model (3) has a stationary distribution. (see Figs. 1, 2).

Simulations of prey population u(t) and its histogram to the stochastic model (3)

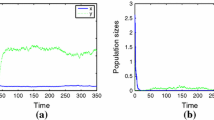
Simulations of predator population v(t) and its histogram to the stochastic model (3)
6 Conclusions
This paper presents a stochastic Holling type II response predator–prey model with hyperbolic mortality. The dynamical behavior of this model has been studied. According to the ergodic property of stochastic logistic model (5), we obtain the critical value \(\lambda _1\) for the persistence in the mean and extinction of this model. If \(\lambda _1<0\), predator population tends to zero. If \(\lambda _1>0\), predator population is persistent in the mean which means model (3) is persistent. Furthermore, by using the theory of Has’minskii and constructing Lyapunov function, we establish sufficient conditions for the existence of ergodic stationary distribution, which implies that the system is permanent. The theories and numerical examples we have presented show that small environmental noise can make the system persistent, while large noise may make the species extinct.
References
Freedman, H.I.: Deterministic Mathematical Models in Population Ecology. Marcel Dekker, New York (1980)
Baurmanna, M., Gross, T., Feudel, U.: Instabilities in spatially extended predator–prey systems: spatio-temporal patterns in the neighborhood of Turing–Hopf bifurcations. J. Theor. Biol. 245, 220–229 (2007)
Li, L., Jin, Z.: Pattern dynamics of a spatial predator–prey model with noise. Nonlinear Dyn. 67, 1737–1744 (2012)
Sun, G., Jin, Z., Li, L., Li, B.: Self-organized wave pattern in a predator–prey model. Nonlinear Dyn. 60, 265–275 (2010)
Hsu, S.B., Hwang, T.W., Kuang, Y.: Global analysis of the Michaelis–Menten ratio-dependent predator-prey system. J. Math. Biol. 42, 489–506 (2001)
Hsu, S.B., Hwang, T.W., Kuang, Y.: Rich dynamics of a ratio-dependent one prey two predator model. J. Math. Biol. 43, 377–396 (2001)
Sambath, M., Balachandran, K., Suvinthra, M.: Stability and Hopf bifurcation of a diffusive predator-prey model with hyperbolic mortality. Complexity (2015). doi:10.1002/cplx.21708
Zhang, T., Xing, Y., Zang, H., Han, M.: Spatio-temporal dynamics of a reaction–diffusion system for a predator–prey model with hyperbolic mortality. Nonlinear Dyn. 78, 265–277 (2014)
Tang, X., Song, Y.: Bifurcation analysis and Turing instability in a diffusive predator–prey model with herd behavior and hyperbolic mortality. Chaos Solitons Fractals 81, 303–314 (2015)
Brentnall, S., Richards, K., Brindley, J., Murphy, E.: Plankton patchiness and its effect on larger-scale productivity. J. Plankton Res. 25, 121–140 (2003)
May, R.M.: Stability and Complexity in Model Ecosystems. Princeton University Press, New Jersey, NJ (1973)
Rudnicki, R.: Long-time behaviour of a stochastic prey–predator model. Stoch. Process. Appl. 108, 93–107 (2003)
Mao, X., Marion, G., Renshaw, E.: Environmental Brownian noise suppresses explosions in population dynamics. Stoch. Processes Appl. 97, 95–110 (2002)
Li, X., Gray, A., Jiang, D., Mao, X.: Sufficient and necessary conditions of stochastic permanence and extinction for stochastic logistic populations under regime switching. J. Math. Anal. Appl. 376, 11–28 (2011)
Liu, M., Wang, K.: Dynamics of a two-prey one-predator system in random environments. J. Nonlinear Sci. 23, 751–775 (2013)
Ji, C., Jiang, D.: Dynamics of a stochastic density dependent predator-prey system with Beddington–DeAngelis functional response. J. Math. Anal. Appl. 381, 441–453 (2011)
Qiu, H., Liu, M., Wang, K., Wang, Y.: Dynamics of a stochastic predator–prey system with Beddington–DeAngelis functional response. Appl. Math. Comput. 219, 2303–2312 (2012)
Liu, M., Wang, K.: Survival analysis of a stochastic cooperation system in a polluted environment. J. Biol. Systems. 19, 183–204 (2011)
Liu, M., Wang, K.: Global stability of a nonlinear stochastic predator-prey system with Beddington–DeAngelis functional response. Commun. Nonlinear. Sci. Numer. Simul. 16, 1114–1121 (2011)
Liu, Q., Zu, L., Jiang, D.: Dynamics of stochastic predator-prey models with Holling II functional response. Commun. Nonlinear Sci. Numer. Simul. 37, 62–76 (2016)
Ji, C., Jiang, D., Yang, Q., Shi, N.: Dynamics of a multigroup SIR epidemic model with stochastic perturbation. Automatica 48, 121–131 (2012)
Has’minskii, R.: Stochastic Stability of Differential equations. Sijthoff & Noordhoff, Alphen aan den Rijn (1980)
Jiang, D., Yu, J., Ji, C., Shi, N.: Asymptotic behavior of global positive solution to a stochastic SIR model. Math. Comput. Model. 54, 221–232 (2011)
Lipster, R.: A strong law of large numbers for local martingales. Stochastics 3, 217–228 (1980)
Zhu, C., Yin, G.: Asymptotic properties of hybird diffusion systems. SIAM J. Control Optim. 46, 1155–1179 (2007)
Higham, D.J.: An algorithmic introduction to numerical simulation of stochastic differential equations. SIAM Rev. 43, 525–546 (2001)
Gard, T.C.: Introduction to Stochastic Differential Equation. Marcel Dekker, Madison Avenue 270, New York (1988)
Strang, G.: Linear Algebra and Its Applications, 3rd edn. Harcourt Brace, Watkins (1988)
Acknowledgements
The authors thank the Natural Science Foundation of Shandong Province, China (No. ZR2014AL008), National Natural Science Foundation of P.R. China (No. 11371085) and the Fundamental Research Funds for the Central Universities of China (Nos.15CX02080A, 15CX08011A).
Author information
Authors and Affiliations
Corresponding author
Appendix
Appendix
In this section, we introduce some results concerning the stationary distribution. For more details readers can see [22].
Let X(t) be a homogeneous Markov process in \(E^l\) (\(E^l\) denotes Euclidean l-space) satisfying the stochastic equation
The diffusion matrix is
Assumption There is a bounded domain \(U\subset E^l\) with regular boundary \({\varGamma }\), which has the properties that
-
(B1)
In the domain U and some neighborhood thereof, the smallest eigenvalue of the diffusion matrix \(\bar{A}(x)\) is bounded away from zero.
-
(B2)
If \(x\in E^l\setminus U\), the mean time \(\tau \) at which a path issuing from x reaches the set U is finite, and \(\sup _{x\in \mathbb {K}}\mathbb {E}_x\tau <+\infty \) for every compact subset \(\mathbb {K}\in E^l\).
Lemma 4
(see [24]). If Assumption 1 holds, then the Markov process X(t) has a stationary distribution \(\mu (\cdot )\). Let \(f(\cdot )\) be a function integrable with respect to the measure \(\mu \). Then
In order to verify (B1), we only need to show that F is uniformly elliptical in U, where \(F(u)=h(x)u_x+0.5\text {trace}(\bar{A}(x)u_{xx})\), that is to say, there is \(M>0\) such that
(see Chapter 3 of [27] and Rayleigh’s principle in [28]). To verify (B2), it suffices to prove that there exist a neighborhood U and a nonnegative \(C^2\)-function such that for any \(x \in E^l\setminus U\), \(\mathcal {L}V\) is negative (see [25]).
Rights and permissions
About this article

Cite this article
Zhang, X., Li, Y. & Jiang, D. Dynamics of a stochastic Holling type II predator–prey model with hyperbolic mortality. Nonlinear Dyn 87, 2011–2020 (2017). https://doi.org/10.1007/s11071-016-3172-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-016-3172-8