
Abstract
The two-wave solutions of the KdV–Sawada–Kotera–Ramani equation are studied in this paper. By reducing this high-order wave equation into two associated solvable ordinary differential equations, we derive the two-wave solutions in the form \(u(x,t)=U(x-c_1t)+V(x-c_2t)\) which includes solitary wave solutions, periodic solutions and quasi-periodic wave solutions by letting \(c_1=c_2\). We obtain a family of new exact two-wave solutions combined by a solitary wave and a periodic wave with two different wave speeds. These new exact two-wave solutions are neither periodic nor quasi-periodic wave solutions but approximating periodic wave solutions as time tends to infinity. The process of translation of the two-wave solution combined by two solitary wave solutions is illustrated by simulation. The approach presented in this work might be applied to study the bifurcation of multi-wave solutions of some important high-order nonlinear wave model equations.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
The KdV–Sawada–Kotera–Ramani equation [1, 5–11] given by
was used to theoretically study the resonances of solitons in one-dimensional space by Hirota [2]. Obviously, Eq. (1.1) becomes the KdV equation when \(b=0\). It reduces to the Sawada–Kotera equation when \(a=0\). As for this equation, the existence of conservation laws was studied in [3]. With the help of symbolic computation system Maple, Zhang, et al. [4] obtained a family of traveling wave solutions by using the generalized auxiliary equation method. Some traveling wave solutions were derived in [5] by the \( ({G'}/{G})-\)expansion method. By using the method of dynamical systems and Congrove’s results [6], Li and Zhang [7] investigated the exact explicit gap soliton, embedded soliton, periodic and quasi-periodic and quasi-periodic wave solutions of the KdV–Sawada–Kotera–Ramani equation. More recently, based on the results in [8], a class of general traveling wave solutions including solitary wave solution, periodic wave solutions and quasi-periodic wave solutions were obtained in [9]. In [10], the KdV–Sawada–Kotera–Ramani Eq. (1.1) was reduced to a classes of first-order solvable nonlinear ordinary differential equations to obtain the traveling wave solutions of this fifth-order nonlinear wave equation.
For the associated fourth-order traveling wave equation
where \(A=15, B= {a}/{b}, D=15, E=3{a}/{b}, F=-{c}/{b}\) and \(G=g\), we recall the following results from [8].
Theorem 1.1
Suppose that \(D\le {3A^2}/{40}\). The function \(y=y(\xi )\) solves the fourth-order ordinary differential Eq. (1.2) if it solves the equation
where
Note that all the denominators in (1.4) should be nonzero. However, if the denominator of \(a_i\) in (1.4) is zero, then \(a_i\) can be arbitrary constant if the numerator is also zero.
Theorem 1.2
Denote \(h_{\pm }=\frac{2\Delta (-a_{2}\pm \sqrt{\Delta })+3a_{1}a_{2}a_{3}}{54a_{3}^2}\) and \(y_{e}^{\pm }=\frac{-a_{2}\pm \sqrt{\Delta }}{3a_{3}}\), where \(\Delta =a_{2}^2-3a_{1}a_{3}>0\), then, the following conclusions hold.
-
(1)
For \(a_{0}=2h_{+}\), Eq. (1.3) has a bounded solution approaching \(y_{e}^{+}\) as \(\xi \) goes to infinity, which can be expressed as
$$\begin{aligned} y= \frac{-a_{2}+\sqrt{\Delta }}{3a_{3}}-\frac{\sqrt{\Delta }}{a_{3}} \text {sech}^2\left[ \frac{1}{2}\Delta ^{\frac{1}{4}}(\xi -\xi _0) \right] , \end{aligned}$$(1.5)a constant solution
$$\begin{aligned} y= \frac{-a_{2}+\sqrt{\Delta }}{3a_{3}}, \end{aligned}$$(1.6)and an unbounded solution
$$\begin{aligned} y= \frac{-a_{2}+\sqrt{\Delta }}{3a_{3}}+\frac{\sqrt{\Delta }}{a_{3}} \text {csch}^2\left[ \frac{1}{2}\Delta ^{\frac{1}{4}}(\xi -\xi _0) \right] , \end{aligned}$$(1.7)where \(\xi _0\) is an arbitrary constant.
-
(2)
For \(a_{0}\in (2h_{-}, 2h_{+})\), if \(a_{3}>0\), then there exists \(y_0\in \left( \frac{-a_{2}-2\sqrt{\Delta }}{3a_{3}}, \frac{-a_{2}-\sqrt{\Delta }}{3a_{3}} \right) \) such that
$$\begin{aligned} y=&y_{0}-\frac{1}{2}\left( 3y_0+\frac{a_2}{a_3}+\sqrt{\Delta _+}\right) \nonumber \\&\quad \times \text {sn}^2 \left( \Omega _+(\xi -\xi _{0}), k_+ \right) , \end{aligned}$$(1.8)where \(k_+=\frac{2\sqrt{3y_{0}^2+2\frac{a_2}{a_3}y_{0} +\frac{a_1}{a_3}}}{-3y_{0}-\frac{a_2}{a_3}+\sqrt{\Delta _+}} \), \(\Omega _+=\frac{\sqrt{2}}{4} \sqrt{-3a_3y_0-a_2+a_3\sqrt{\Delta _+}}\) and \(\Delta _+=\left( \frac{a_2}{a_3}\right) ^2-3y_{0}^2-2\frac{a_2}{a_3}y_0-4\frac{a_1}{a_3}\), is a smooth periodic solution of Eq. (1.3). If \(a_{3}<0\), then there exists \(y_0\in \Big (\frac{-a_{2}-\sqrt{\Delta }}{3a_{3}}, \frac{-a_{2}-2\sqrt{\Delta }}{3a_{3}} \Big )\),
$$\begin{aligned}&y= y_{0}-\frac{1}{2}\left( 3y_0+\frac{a_2}{a_3}-\sqrt{\Delta _-}\right) \nonumber \\&\quad \text {sn}^2\left( \Omega _-(\xi -\xi _{0}), k_- \right) , \end{aligned}$$(1.9)where \( \Omega _-=\frac{\sqrt{2}}{4} \sqrt{-3a_3y_0-a_2-a_3\sqrt{\Delta _-}}\), \(k_-=2\frac{\sqrt{3y_{0}^2+2\frac{a_2}{a_3}y_0+\frac{a_1}{a_3}}}{3y_{0}+\frac{a_2}{a_3}+\sqrt{\Delta _-}} \) and \(\Delta _-=\left( \frac{a_2}{a_3}\right) ^2-3y_{0}^2-2\frac{a_2}{a_3}y_0-4\frac{a_1}{a_3}\), is a smooth periodic solution of Eq. (1.3); here \( a_{0}=-(a_{3}y_0^3+a_{2}y_0^{2}+a_{1}y_0)\).
-
(3)
For \(a_{0}\in (-\infty , 2h_{-}]\cup (2h_{+}, +\infty )\), Eq. (1.3) has no nontrivial bounded solution. When \(a_{0}= 2h_{-}\), an unbounded solution is given by
$$\begin{aligned} y= -\frac{a_{2}+\sqrt{\Delta }}{3a_{3}}+\frac{\sqrt{\Delta }}{a_{3}} \text {sec}^2\left[ \frac{1}{2}\Delta ^{\frac{1}{4}}(\xi -\xi _0) \right] , \end{aligned}$$(1.10)
and a constant solution is written as
In this paper, extending the idea in [8–10], we investigate the two-wave solutions of the nonlinear wave Eq. (1.1) in the form \(u(x, t)=U(x-c_1t)+V(x-c_2t)\) which includes the traveling wave solutions by choosing \(c_1=c_2\).
2 Exact two-wave and quasi-periodic wave solutions to the KdV–Sawada–Kotera–Ramani equation
In this section, we aim to study the two-wave solutions of the KdV–Sawada–Kotera–Ramani Eq. (1.1) which can be rewritten as
Let \(u(x, t)=U(\xi _1)+V(\xi _2)\), where \(\xi _1=x-c_1t\) and \(\xi _2=x-c_2t\). Substituting \(u(x, t)=U(\xi _1)+V(\xi _2)\) into Eq. (2.1) yields
where \(g_1\), \(g_2\), \(f_1\) and \(f_2\) are arbitrary constants. Clearly, \(u(x, t)=U(\xi _1)+V(\xi _2)\) solves the KdV–Sawada–Kotera–Ramani Eq. (1.1) provided that there exist some values of \(g_1\), \(g_2\), \(f_1\) and \(f_2\) such that U and V satisfy
and
respectively.
Multiplying the first equation of system (2.3) by \(\frac{dU}{d\xi _1}\) and integrating once with respect to \(\xi _1\) yield
where \(G_1\) is a constant of integration. This is to say that for the case when \(\frac{dU}{d\xi _1}\ne 0\) the first equation of system (2.3) is equivalent to Eq. (2.5) with arbitrary constant \(G_1\) which is Eq. (1.3) with \(a_3=-2, \ a_2=-\frac{a}{5b}, \ a_1=\frac{2}{15}(\frac{c_2}{b}+f_2),\) \(a_0=G_1\). Note that the second equation of system (2.3) is exactly Eq. (1.2) with \(A=15, \ B=\frac{a}{b}, \ D=15, \ E=3\frac{a}{b}, \ F=f_1\) and \(G=g_1\). According to Theorem 1.1, we know that the solution set of the first equation of system (2.3) can be the subset of the solution set of the second equation of system (2.3) if the coefficients of system (2.3) satisfy (1.4). Based on the analysis above and careful computations, we can draw the following conclusion.
Lemma 2.1
Let
Then the solutions of the first equation of systems (2.3) or (2.4) satisfy (2.3) or (2.4) with certain values of \(g_1\) or \(g_2\), respectively.
Proof
It is easy to see that for any given value of \(f_2\) there exists a constant \(g_1\) such that the constant solution of the first equation of (2.3) satisfies the second one. According to Theorem 1.1 and the analysis above, to prove the nontrivial solutions of the first equation of system (2.3) satisfy (2.3) with certain value of \(g_1\), we only need to check that for any given \(G_1\) there exists a constant \(g_1\) such that (2.5) and the second equation of system (2.3) satisfy (1.4) when (2.6) holds.
Actually, it is easy to check that the first equivalent of (1.4) is valid when its right side is “+”. The second equivalent of (1.4) is right because the numerator and denominator of its right side are both zero. The third equivalent require the following condition
Obviously, the last equation of (1.4) is linear in G and thus it is also linear in \(g_1\), which implies that there exists \(g_1\) such that the last equivalent of (1.4) holds for any values of \(f_1\) and \(f_2\). That is to say that the solutions of the first equations of (2.3) satisfy the second one with some constant \(g_1\) provided that (2.7) holds.
Similar analysis on system (2.4) gives the condition that
under which V solves system (2.4) provided that it solves the first equation of (2.4).
Now solving Eqs. (2.7) and (2.8) for \(f_1\) and \(f_2\) yields (2.6). This complicate the proof of Lemma 2.1. \(\square \)
Theorem 2.1
Suppose that \(U(x, t)=U(x-c_1t)=U(\xi _1)\) and \(V(x,t)=V(x-c_2t)=V(\xi _2)\) satisfy equations
and
respectively. Then \(u(x,t)=U(x,t)+V(x,t)\) solves Eq. (1.1).
Proof
Clearly, Eqs. (2.9) and (2.10) are exactly the first equation of (2.3) and (2.4) with \(f_1=\frac{c_1+5c_2}{24b}+\frac{a^2}{5b^2}\) and \(f_2=\frac{c_2+5c_1}{24b}+\frac{a^2}{5b^2}\). By Lemma 2.1, one knows that there exist two constants \(g_1\) and \(g_2\) such that the solutions of (2.9) satisfy (2.3) and the solutions of (2.10) satisfy (2.4). That is to say that if \(U(\xi _1)\) and \(V(\xi _2)\) satisfy (2.9) and (2.10), respectively, then there are two constants \(g_1\) and \(g_2\) such that substituting \(U(\xi _1)\) and \(V(\xi _2)\) makes (2.2) an identity, which implies that \(u(x,t)=U(x,t)+V(x,t)\) solves Eq. (1.1). \(\square \)
From Theorem 1.2, we know that Eq. (2.9) admits the following solutions:
For any \(\theta _1 \in \left( \frac{-6\text {sgn}(b)a+\sqrt{180a^2+150b(5c_2+c_1)}}{180|b|},\right. \left. \frac{-3\text {sgn}(b)a+\sqrt{180a^2+150b(5c_2+c_1)}}{90|b|} \right) \),
where \(\Omega _1(\theta _1, c_1, c_2)=\frac{\sqrt{2}}{4} \sqrt{6\theta _1+\frac{a}{5b}+2\sqrt{\Delta _1}}\), \(k_1(\theta _1, c_1, c_2) =\frac{2\sqrt{3\theta _1^2+\frac{a}{5b}\theta _1-\left( \frac{a^2}{75b^2}+\frac{5c_2+c_1}{72b}\right) }}{3\theta _1+\frac{a}{10b}+\sqrt{\Delta _1}} \) and \(\Delta _1(\theta _1, c_1, c_2)=-3\theta _1^2 -\frac{a}{5b}\theta _1+\frac{19a^2}{300b^2}+\frac{5c_2+c_1}{18b}\).

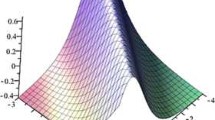
Portrait of the two-wave solution: \(u_{33}(x, t)=U_3(x-c_1t)+V_3(x-c_2t)\) of Eq. (1.1) with parameters: \(a=1, \ b=1, \ c_1=1, \ c_2=2, \ \xi _1=\xi _2=0\). a Three-dimensional portrait; b overhead view with contour plot; c \(t=-5\); d \(t=-2\); e \(t=0\); f \(t=3\); g \(t=4\); h \(t=10\); i \(t=20\); j \(t=40\)
According to Theorem 1.2, we know that (2.10) admits the following solutions:
For any \(\theta _2 \in \left( \frac{-6\text {sgn}(b)a+\sqrt{180a^2+150b(c_2+5c_1)}}{180|b|},\right. \left. \frac{-3\text {sgn}(b)a+\sqrt{180a^2+150b(c_2+5c_1)}}{90|b|} \right) \),
where \(\Omega _2(\theta _2, c_1, c_2)=\frac{\sqrt{2}}{4} \sqrt{6\theta _2+\frac{a}{5b}+2\sqrt{\Delta _2}}\), \(k_2(\theta _2, c_1, c_2) =\frac{2\sqrt{3\theta _2^2+\frac{a}{5b}\theta _2-\left( \frac{a^2}{75b^2}+\frac{c_2+5c_1}{72b}\right) }}{3\theta _2+\frac{a}{10b}+\sqrt{\Delta _2}} \) and \(\Delta _2(\theta _2, c_1, c_2)=-3\theta _2^2 -\frac{a}{5b}\theta _2+\frac{19a^2}{300b^2}+\frac{c_2+5c_1}{18b}\).

Portrait of the two-wave solution: \(u_{66}(x, t)=U_6(x-c_1t)+V_6(x-c_2t)\) of Eq. (1.1) with parameters: \(a=1,\ b=1, \ c_1=1, \ c_2=2, \ \theta _1=-1/30+\sqrt{1830}/120, \ \theta _2=-1/30+2\sqrt{1230}/225, \ \xi _1=\xi _2=0\). a Three-dimensional portrait; b overhead view with contour plot; c \(t=0\); d \(t=6\)

Portrait of the two-wave solution: \(u_{36}(x, t)=U_3(x-c_1t)+V_6(x-c_2t)\) of Eq. (1.1) with parameters: \(a=1, \ b=1, \ c_1=1, \ c_2=2, \ \theta _1=-1/30+2\sqrt{1230}/225,\) \( \xi _0=\xi _1=0\). a Three-dimensional portrait; b overhead view with contour plot; c \(t=0\); d \(t=1\); e \(t=6\)
Based on the analysis above and Theorem 2.1, we obtain some exact two-wave solutions to the KdV–Sawada–Kotera–Ramani Eq. (1.1).
Theorem 2.2
The KdV–Sawada–Kotera–Ramani Eq. (1.1) admits the wave solutions \(u_{ij}(x, t)=U_i(x-c_1t)+V_j(x-c_2t)\), \(i, j\in \{1,2,3,4,5,6\}\). Here \(U_i\) and \(V_j\) (\(i, j\in \{1,2,3,4,5,6\}\)) are determined by (2.11)–(2.22), and the wave speeds \(c_1\) and \(c_2\) satisfy \(6a^2+5b(c_1+5c_2)>0\) and \(6a^2+5b(c_2+5c_1)>0\), respectively.

Three-dimensional portrait of the two-wave solution \(u_{63}(x, t)=U_6(x-c_1t)+V_3(x-c_2t)\) of Eq. (1.1) with parameters: \(a=1, \ b=1, \ c_1=1, \ c_2=2, \ \theta _1=-1/30+\sqrt{1830}/120,\) \(\xi _0=\xi _1=0\)
Remark 2.1
For \(c_1\ne c_2\) and \( i\ne j, \ i, j\in \{3,4,5,6\}\), \(u_{ij}(x, t)=U_i(x-c_1t)+V_j(x-c_2t)\) is a two-wave solution to the KdV–Sawada–Kotera–Ramani equation. If \(c_1=c_2=c\), for any \(i\in \{1,2\}, \ j\in \{1,2,3,4,5,6\}\), \(u_{jj}(x, t)=2U_j(x-ct)\) and \(u_{ij}(x, t)=u_{ji}(x, t)=U_i(x-ct)+V_j(x-ct)\) are the exact traveling wave solutions obtained in [10]. However, for \(c_1=c_2=c\) and \(i, j \in \{3,4,5,6\}\) and \(i\ne j\) the exact traveling wave solutions \(u_{ij}(x, t)=U_i(x-ct)+V_j(x-ct)\) are new traveling wave solutions. We also point out that \(u_{ij}(x, t)\) is an unbounded solution if and only if \(\{i,j\}\cap \{4,5 \}\ne \emptyset \).
3 Simulation of some two-wave and quasi-periodic wave solutions
In order to understand intuitively the properties of these exact bounded wave solutions to the KdV–Sawada–Kotera–Ramani Eq. (1.1) obtained in Sect. 2, four figures which are drawn with Maple are presented in this section.
Figure 1 illustrates the two-wave solution \(u_{33}(x, t)=U_3(x-c_1t)+V_3(x-c_2t)\) of Eq. (1.1) with two different wave speeds \(c_1\) and \(c_2\). We can observe the process of two solitary waves that intersect and separate clearly from the wave profiles in Fig. 1. The two solitary waves coincide into one solitary wave and gradually separate into two waves when t tends to positive or negative infinity, which exhibits the typical properties of solitons.
Figure 2 illustrates the quasi-periodic two-wave solution \(u_{66}(x, t)=U_6(x-c_1t)+V_6(x-c_2t)\) of Eq. (1.1) with two different wave speeds \(c_1\) and \(c_2\). The wave profiles at \(t=0\) and \(t=6\) are presented to demonstrate that the solution \(u_{66}(x, t)\) is quasi-periodic with respect to the variable x. Actually, it is also quasi-periodic with respect to the variable t.
Figure 3 illustrates the two-wave solution \(u_{36}(x, t)=U_3(x-c_1t)+V_6(x-c_2t)\) of Eq. (1.1) with two different wave speeds \(c_1\) and \(c_2\). It is worth pointing out that the solution \(u_{36}(x, t)=U_3(x-c_1t)+V_6(x-c_2t)\) is an exact wave solution which is neither a quasi-periodic wave nor a solitary wave solution. In fact, \(u_{36}(x, t)\) is not a quasi-periodic function and its limit fails to exist as t approaches \(\infty \) if \(c_1c_2\ne 0\) even when \(c_1=c_2\). From (2.13) we know that \( lim_{\xi \rightarrow \infty }U_3(\xi )=U_1\) when \(b<0\) or \( lim_{\xi \rightarrow \infty }U_3(\xi )=U_2\) when \(b>0\), so \(u_{36}(x, t)\) with \(c_1c_2\ne 0\) approximates the periodic wave solution \(u _{16}(x, t)\) when \(b<0\) or \(u_{26}(x, t)\) when \(b>0\) as t approaches \(\infty \). By the symmetry of Eq. (2.9) and (2.10), we can find that the two-wave solution \(u_{i,j}(x, t)=U_i(x-c_1t)+ V_j(x-c_2t)\) is equivalent to the solution \(u_{ji}(x, t)=U_j(x-c_2t)+ V_i(x-c_1t)\). Thus, the two-wave solution \(u_{6,3}(x, t)=U_6(x-c_1t)+ V_3(x-c_2t)\) illustrated in Fig. 4 is the same as the solution \(u_{3, 6}(x,t)= U_3(x-c_2t)+V_6(x-c_1t)\).
4 Conclusion and discussion
The dynamical system theory has been well applied to study the bifurcation and exact traveling wave solutions of some nonlinear wave equations [7–18], especially those equations whose corresponding traveling wave systems can be reduced into planar dynamical systems. The advantage of this method is that all possible kinds of traveling wave solutions can be observed clearly from the phase portraits of their corresponding traveling wave systems. It has been successfully applied [11–13, 17, 18] to explain the reason why some analytic nonlinear wave equations possess the singular traveling wave solutions, such as compacton, peakon and cuspon. However, it is usually out of the reach of this approach to study the multi-wave solutions of nonlinear wave equations.
In this paper, by reducing the KdV–Sawada–Kotera–Ramani equation (1.1) into two systems of ordinary differential equations, we obtained a very general class of exact solutions of this equation, which include the solitary wave solutions, periodic and quasi-periodic traveling wave solutions, some unbounded traveling solutions and some two-wave solutions as well. This work provides a supplement to existing literature on reductions of nonlinear PDEs [19]. It is worth pointing out that the multi-wave solutions of nonlinear wave equations, especially Hirota bilinear equations, could be generated through the multiple exp-function method [20, 21].
Evidently, the method we have proposed in this paper can also be applied to study the existence and exact multi-wave solutions of some other high-order nonlinear wave equations provided that they can be reduced into ordinary differential equations properly. Research on multiple wave solutions shows various situations of integrability and bifurcation of nonlinear PDEs, and so the approach proposed in this work will amend the PDE theory and improve our understanding on solutions to nonlinear PDEs.
References
Fan, E.G.: Supersymmetric KdV–Sawada–Kotera–Ramani equation and its quasi-periodic wave solutions. Phy. Lett. A 374, 744–749 (2010)
Hirota, R., Ito, M.: Resonance of solitons in one dimension. J. Phys. Soc. Jpn. 52(3), 744–748 (1983)
Konno, K.: Conservation law of modified Sawada–Kotera equation in complex plane. J. Phys. Soc. Jpn. 61, 51–54 (1992)
Zhang, J., Zhang, J., Bo, L.: Abundant travelling wave solutions for KdVSawadaKotera equation with symbolic computation. Appl. Math. Comput. 203, 233–237 (2008)
Qin, Z., Mu, G., Ma, H.: \(G^{\prime }/G\)-expansion method for the fifth-order forms of KdV–Sawada–Kotera equation. Appl. Math. Comput. 222, 29–33 (2013)
Cosgrove, M.C.: Higher-order Painleve equations in the polynomial class I. Bureau symbol P2. Stud. Appl. Math. 104, 1–65 (2000)
Li, J.B., Zhang, Y.: Homoclinic manifolds, center manifolds and exact solutions of four-dimensional traveling wave systems for two classes of nonlinear wave equations. Int. J. Bifurcation and Chaos 21(2), 527–543 (2011)
Zhang, L.J., Khalique, C.M.: Exact Solitary wave and periodic wave solutions of the Kaup–Kuperschmidi equations. J. Appl. Anal. Comput. 5(3), 485–495 (2015)
Zhang, L.J., Khalique, C.M.: Exact Solitary wave and periodic wave solutions of a class of higher-order nonlinear wave equations, Math. Prob. Engin. 2015 (2015) ID 548606
Zhang, L.J., Khalique, C.M.: Exact Solitary wave and quasi-periodic wave solutions of the KdV–Sawada–Kotera–Ramani equation. Adv. Differ. Equ. 2015, 195 (2015)
Li, J.B.: Singular Traveling Wave Equations: Bifurcations and Exact Solutions. Science Press, Beijing (2013)
Liu, Z.R., Long, Y.: Compacton-like wave and kink-like wave of GCH equation. Nonlinear Anal. Real. World Appl. 8(1), 136–155 (2007)
Wang, Y., Bi, Q.S.: Different wave solutions associated with singular lines on phase plane. Nonlinear Dyn. 69(4), 1705–1731 (2012)
Leta, T.D., Li, J.B.: Exact traveling wave solutions and bifurcations of the generalized derivative nonlinear Schrdinger equation. Nonlinear Dyn. (2016). doi:10.1007/s11071-016-2741-1
Ding, H., Zu, J.W.: Steady-state responses of pulley-belt systems with a one-way clutch and belt bending stiffness. ASME J. Vib. Acoustic 136, 041006 (2014)
Ding, H.: Periodic responses of a pulley-belt system with one-way clutch under inertia excitation. J. Sound Vib 353, 308–326 (2015)
Shen, J.W.: Shock wave solutions of the compound Burgers–Korteweg–de equation. Appl. Math. Comput. 196(2), 842–849 (2008)
Shen, J.W., Miao, B., Luo, J.: Bifurcations and highly nonlinear traveling waves in periodic dimer granular chains. Math. Method Appl. Sci. 34(12), 1445–1449 (2011)
Ma, W.X., Fuchssteiner, B.: Explicit and exact solutions to a Kolmogorov–Petrovskii–Piskunov equation. Int. J. Non-Linear Mech. 31(3), 329–338 (1996)
Ma, W.X., Zhu, Z.N.: Solving the (3 + 1)-dimensional generalized KP and BKP equations by the multiple exp-function algorithm. Appl. Math. Comput. 218(24), 11871–11879 (2012)
Ma, W.X., Huang, T.W., Zhang, Y.: A multiple exp-function method for nonlinear differential equations and its application. Phys. Scripta 82, 065003 (2010)
Acknowledgments
L. Zhang thanks the North-West University for the postdoctoral fellowship. This work is supported by the National Nature Science Foundation of China (Nos. 11672270, 11501511). This research is also supported by Zhejiang Provincial Natural Science Foundation of China under Grant No. LY15A010021. The first author is also partially supported by DST-NRF Centre of Excellence in Mathematical and Statistical Sciences (CoE-MaSS). We would like to thank anonymous referees for their valuable comments which highly improve the presentation of this work.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Zhang, L., Khalique, C.M. Quasi-periodic wave solutions and two-wave solutions of the KdV–Sawada–Kotera–Ramani equation. Nonlinear Dyn 87, 1985–1993 (2017). https://doi.org/10.1007/s11071-016-3168-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-016-3168-4