
Abstract
We explore the behaviour of an ensemble of chaotic oscillators diffusively coupled only to an external chaotic system, whose intrinsic dynamics may be similar or dissimilar to the group. Counter-intuitively, we find that a dissimilar external system manages to suppress the intrinsic chaos of the oscillators to fixed point dynamics, at sufficiently high coupling strengths. So, while synchronization is induced readily by coupling to an identical external system, control to fixed states is achieved only if the external system is dissimilar. We quantify the efficacy of control by estimating the fraction of random initial states that go to fixed points, a measure analogous to basin stability. Lastly, we indicate the generality of this phenomenon by demonstrating suppression of chaotic oscillations by coupling to a common hyper-chaotic system. These results then indicate the easy controllability of chaotic oscillators by an external chaotic system, thereby suggesting a potent method that may help design control strategies.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
The rapidly growing science of complex systems has helped in understanding spatiotemporal pattern formation in wide-ranging systems, from natural systems, such as climate and biological systems on the one hand, to man-made systems, such as lasers and electronic circuits on the other hand. From the broad perspective of dynamical systems, the emergent behaviour of networks with different dynamical constituents is important. The basic ingredient of network models consists of local dynamical units, which may range from simple linear systems to chaotic systems. For instance, the electrical activities of neurons can be very complex, and experiments show quiescent, spiking, or bursting behaviour under varying excitability or external forcing current [1, 2]. The second important aspect of such models is the nature of the coupling interaction, for instance it may be diffusive or pulsatile, with or without delay. The last crucial feature is the topology of the connection matrix that determines the linkage between the elemental dynamical units. For instance, different collective behaviours are observed in networks of model neurons [3, 4] under varying connectivities, ranging from synchronization and coherence resonance to de-coherence [5]. Further, results from neuroscience suggest that perception and memory arise from synchronized networks [6].
A particular phenomenon of special significance in complex systems is the stabilization of steady states, and this has been observed in systems ranging from chemical reactions [7, 8] to biological oscillators [9–13]. Such fixed dynamics may be the desired target in certain cases, for instance in laser systems [14–16], where it leads to stabilization. In the biological context, some neurological diseases such as epilepsy lead to excessive neuronal excitation and so exploration of mechanisms that can suppress excitation is important for regulation of the disease [17]. On the other hand, the suppression of oscillations can also signal pathology, such as in neuronal disorders like Alzheimer’s or Parkinson’s disease [18–20], where the focus is on prevention of fixed dynamics. Further, the suppression of oscillations is important in human-engineered systems, where much effort is focussed on control methods that can effectively and efficiently tame chaotic dynamics [21–28]. For all these reasons, there has been considerable sustained research on suppression of chaotic oscillations in nonlinear systems over the years.
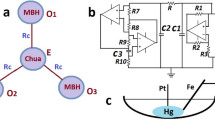
In this work, we explore the behaviour of an ensemble of chaotic oscillators coupled only to an external chaotic system. So there is no direct coupling amongst the oscillators, and the interaction is mediated by coupling to the common external system [29]. So this external system can be thought of as a pacemaker [13] of the group of oscillators (cf. Fig. 1 for a schematic). Note that the intrinsic dynamics of the external system can be identical to the group, or it can be an entirely different type of dynamical system.

Schematic of a group of N oscillators coupled to an external oscillator

Bifurcation diagrams, with respect to the coupling strength \(\varepsilon \), of one representative oscillator in the group (left) and an external oscillator (right). Here the group consists of chaotic Rössler oscillators with parameters \(\omega =0.41, \delta =0.0026, a=0.15, b=0.4\) and \(c=8.4\) in Eq. 1, and the external oscillator is: a a chaotic Rössler oscillator with parameters \(\omega =0.41, \delta =0.0026, a=0.15, b=0.4\) and \(c=8.4\) in Eq. 2, and b a chaotic Lorenz system with parameters \(\sigma =10.0, \beta =8.0/3.0\) and \(r=25.0\) in Eq. 3. In all the diagrams (including ones below), we display the x variable on the Poincare section of the phase curves of the oscillators at \(y = y_{\text {mid}}\), where \(y_{\text {mid}}\) is the mid-point of the span of attractors along the y-axis
Specifically, we first consider the example of N Rössler oscillators in a group, labelled by node index \(i= 1, \dots N\), with dynamics given by:
where \(x_\mathrm{ext}\) is a dynamical variable of the common external system to which the group is coupled diffusively. The strength of coupling is given by \(\varepsilon \).
When the external oscillator is also a Rössler oscillator, its governing equations are given by:
When the external oscillator is distinct from the group, for instance a Lorenz system, its dynamical equations are given by:
Parameters \(\sigma , \beta , r\) in the Lorenz system and parameters \(a, b, c, \omega , \delta \) in the Rössler oscillator regulate the nature of the uncoupled dynamics, which can range from fixed points to chaos. In the sections below, we will present the spatiotemporal patterns arising in two distinct situations of interest: (a) the group of oscillators and the external oscillator are of identical type, and (b) the external chaotic system is distinct from the group of oscillators and may even be hyper-chaotic.
2 Emergent controlled dynamics
Figure 2 shows the bifurcation diagrams of the illustrative cases of an ensemble of chaotic Rössler oscillators coupled to (a) a chaotic external system that is identical (namely another Rössler oscillator) and (b) a chaotic external system that is dissimilar (namely, a Lorenz system). We find that a group of chaotic oscillators can be controlled to fixed points by the external dissimilar chaotic oscillator, when coupling is stronger than a critical value. However, when the chaotic oscillators are coupled to an external chaotic system of an identical type (namely all are Rössler oscillators), none of the oscillators are controlled to fixed states, even for strong coupling.

Phase portraits of a representative Rössler oscillator from the group (left) with parameters \(\omega =0.41, \delta =0.0026, a=0.15, b=0.4\) and \(c=8.4\) in Eq. 1, coupled to a common external system (right), at different coupling strengths \(\varepsilon \). The panel (a) shows the case of coupling to an identical external Rössler oscillator, while panel (b) shows the case of coupling to a dissimilar chaotic oscillator, namely an external Lorenz system with parameters \(\sigma =10.0, \beta =8.0/3.0\) and \(r=25.0\) in Eq. 3

Bifurcation diagrams, with respect to the coupling strength \(\varepsilon \), of one representative oscillator in the group (green) and an external oscillator (red), for the cases where the group of oscillators is comprised of chaotic Rössler oscillators with parameters \(\omega =0.41, \delta =0.0026, a=0.15, b=0.4\) and \(c=8.4\) in Eq. 1 and the external oscillator is a chaotic Lorenz system with parameters \(\sigma =10.0, \beta =8.0/3.0\) and \(r=25.0\) in Eq. 3. (Color figure online)
Figure 3 further illustrates this behaviour through phase portraits for representative Rössler oscillators from the group, for the case of coupling to (a) an identical external oscillator, and (b) a dissimilar external system. It is clear that for strong coupling the dynamics of the chaotic system is quenched to a fixed point when the external oscillator is dissimilar (cf. Fig. 3b), while coupling to a similar external oscillator does not suppress the chaos (cf. Fig. 3a).
When a group of chaotic Rössler oscillators is coupled on a common external chaotic Lorenz system, we find that there exists two steady states, as illustrated in Fig. 4. Depending on initial conditions, the system can go to either of the steady states. Linear stability analysis, via eigenvalues of the Jacobian, also corroborates the stabilization of the fixed points seen in the bifurcation diagrams (see “Appendix” for details).
3 Synchronization
We study the advent of synchronization in the group of oscillators, as a function of the coupling strength, for the case of identical and distinct external systems. Our focus is to ascertain what kind of external system facilitates synchrony and which ones lead to control to steady states.
We calculate the synchronization error of the group of oscillators, averaged over time T, given by
where \((\bar{x})_t=\frac{1}{N}\sum _{i=1}^Nx_i\) and \((\bar{x^2})_t=\frac{1}{N}\sum _{i=1}^Nx^2_i\) are the average values of x and \(x^2\) of oscillators \(i = 1, \dots N\), at an instant of time t. Further, we average Z over different initial states to obtain an ensemble averaged synchronization error \(\langle Z \rangle \).
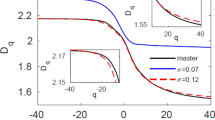
We display the average synchronization error defined above, in Fig. 5. It is clearly evident from the figure that the group of oscillators, coupled only to a common external chaotic system, get synchronized at sufficiently high coupling strengths. This trend holds for both identical and distinct external oscillators, suggesting that coupling to an external chaotic oscillator of wide-ranging dynamical types can induce synchronization. The critical coupling at which synchronization occurs is higher when the common external oscillator is distinct from the group.

Synchronization error \(\langle Z \rangle \) of the chaotic Rössler oscillators in the group with parameters \(\omega =0.41, \delta =0.0026, a=0.15, b=0.4\) and \(c=8.4\) in Eq. 1, averaged over 100 different initial conditions, with respect to coupling strength \(\varepsilon \), for the case where the common external system is an identical chaotic Rössler oscillator (blue) with parameters \(\omega =0.41, \delta =0.0026, a=0.15, b=0.4\) and \(c=8.4\) in Eq. 2 and a chaotic Lorenz attractor (red) with parameters \(\sigma =10.0, \beta =8.0/3.0\) and \(r=25.0\) in Eq. 3. (Color figure online)

Dependence of the fraction of initial states \(\hbox {BS}_\mathrm{fixed}\) attracted to the fixed point state, on the coupling strength \(\varepsilon \), for a group of chaotic Rössler oscillators with parameters \(\omega =0.41, \delta =0.0026, a=0.15, b=0.4\) and \(c=8.4\) in Eq. 1, coupled to a common external chaotic Lorenz system with parameters \(\sigma =10.0, \beta =8.0/3.0\) and 3 different values of parameter r in Eq. 3: 24.7 (red), 25.0 (green) and 25.3 (blue). Note that there is no dependence of \(\hbox {BS}_\mathrm{fixed}\) on the number of oscillators N in the group. (Color figure online)
Interestingly, as coupling strength increases further, the oscillators are controlled to steady states, when the external oscillator is dissimilar. So an identical common external oscillator induces synchronization at weaker coupling strengths than a dissimilar external oscillator, but control to steady states occurs only when the external oscillator is distinct from the group.
4 Basin stability of the spatiotemporal fixed point
We now quantify the efficacy of control to steady states by finding the fraction \(\hbox {BS}_\mathrm{fixed}\) of initial states that are attracted to fixed points, starting from generic random initial conditions. This measure is analogous to recently used measures of basin stability [30] and indicates the size of the basin of attraction for a spatiotemporal fixed point state. \(\hbox {BS}_\mathrm{fixed} \sim 1\) suggests that the fixed point state is globally attracting, while \(\hbox {BS}_\mathrm{fixed} \sim 0\) indicates that almost no initial states evolve to stable fixed states.

Dependence of the fraction of initial states \(\hbox {BS}_\mathrm{fixed}\) attracted to the fixed point state, on the coupling strength \(\varepsilon \), for a group of chaotic Rössler oscillators with parameters \(\omega =0.41, \delta =0.0026, a=0.15, b=0.4\) and \(c=8.4\) in Eq. 1, coupled to a common external chaotic Lorenz system with parameters \(\sigma =10.0, \beta =8.0/3.0\) and \(r=25.0\) in Eq. 3. In (a) the 5 curves are obtained from initial states randomly distributed in a box of linear size \(l=2, 4, 6, 8, 10\) in the x, y and z coordinates, and in (b) we show data collapse by appropriate scaling, with \(v = l^3\), and \(\varepsilon _c=0.524\)

Bifurcation diagram, with respect to the coupling strength \(\varepsilon \), of one representative oscillator of the group (left) and the external system (right), when the external system is hyper-chaotic with parameters \(k'=3.85, \beta '=18.0\) and \(b'=88.0\) in Eq. 4, and the group consists of chaotic Rössler oscillators with parameters \(\omega =0.41, \delta =0.0026, a=0.15, b=0.4\) and \(c=8.4\) in Eq. 1
We show the dependence of this fraction \(\hbox {BS}_\mathrm{fixed}\) in Figs. 6, 7 for a group of chaotic Rössler oscillators coupled to an external chaotic Lorenz system as coupling strength is varied. It is evident that there is a sharp transition to complete control, where the spatiotemporal fixed point state is globally attracting, at sufficiently strong coupling. Namely, there is a critical coupling strength \(\varepsilon _c\) beyond which the intrinsic chaos of the oscillators is suppressed to fixed points, over a very large basin of initial states.
Note that qualitatively similar results, namely emergence of fixed point states at large enough coupling, are obtained over a wide range of parameters in Eqs. 1–3, indicating robustness of the phenomenon. However quantitatively, the precise value of \(\varepsilon _c\) may depend on the parameters of the system.
For instance, the onset of the fixed point state for Rössler oscillators coupled to an external chaotic Lorenz system, for different values of parameter c in Eq. 1, is independent of the parameter, as this parameter influences the Lyapunov exponent of the intrinsic dynamics of the Rössler oscillators very little. On the other hand, external Lorenz systems with varying parameter r in Eq. 3 significantly affect \(\varepsilon _c\) (cf. Fig. 6). This can be rationalized by noting that the Lyapunov exponent of the intrinsic dynamics of the external system increases linearly with r, and it is clearly observed that as the Lyapunov exponent of the external system increases, the transition shifts to higher coupling strengths. Namely, it takes stronger coupling to yield control to steady states as the common (dissimilar) external system gets more chaotic.
Lastly, note that we have not explicitly put in any feedback loops designed to achieve the steady states, as often used in control schemes relevant to engineered systems. Rather we have explored the naturally emergent behaviour of the system. Also interestingly, since the stabilization of the steady states is independent of system size, if this were to be used as a control strategy, arbitrarily large groups could potentially be controlled by just one external chaotic system.
5 Control to steady states via an external hyper-chaotic oscillator
We have checked the generality of the results by considering a more stringent case of a group of chaotic oscillators coupled to an external hyper-chaotic oscillator, given by:
where \(G(u) = \frac{1}{2}b' \{ |u-1| + (u-1) \}\)
where \(k', \beta ', b'\) are the parameters determining the dynamics of the oscillator.
We have coupled one variable (specifically, \(x_\mathrm{ext}\)) of the hyper-chaotic external oscillator with one variable (specifically, x) of the group of chaotic Rössler oscillators.
Interestingly, we again find that the intrinsically chaotic Rössler oscillators go to fixed points, when coupled to a common external hyper-chaotic oscillator, for sufficiently strong coupling (cf. Fig. 8). Further, it is apparent from Fig. 9, which displays the phase portraits of the Rössler oscillators at different \(\varepsilon \), that the group of oscillators become regular when coupling strength is high.

Phase portrait of a representative Rössler oscillator from the group with parameters \(\omega =0.41, \delta =0.0026, a=0.15, b=0.4\) and \(c=8.4\) in Eq. 1, coupled to a common external hyper-chaotic oscillator with parameters \(k'=3.85, \beta '=18.0\) and \(b'=88.0\) in Eq. 4, at different coupling strengths \(\varepsilon \)

Phase portrait of the external hyper-chaotic oscillator with parameters \(k'=3.85, \beta '=18.0\) and \(b'=88.0\) in Eq. 4, for the case of an uncoupled external oscillator (red) and an oscillator with coupling to a group of chaotic Rössler oscillator with parameters \(\omega =0.41, \delta =0.0026, a=0.15, b=0.4\) and \(c=8.4\) in Eq. 1, with coupling strength \(\varepsilon =1.0\) (blue). (Color figure online)

a Maximum real part \(\lambda _\mathrm{max}\) of the eigenvalues of the Jacobian at the fixed points, as a function of coupling strength \(\varepsilon \), for the external Lorenz system having parameters \(\sigma =10.0, \beta =8.0/3.0\) and \(r=25.0\) and (bottom to top) \(r = 24.7, 25.0, 25.3, 25.7, 26.0\) in Eq. 3 and group of chaotic Rössler oscillator with parameters \(\omega =0.41, \delta =0.0026, a=0.15, b=0.4\) and \(c=8.4\) in Eq. 1. b Dependence of \(\lambda _\mathrm{max}\) on parameter r of the external Lorenz system, at fixed coupling strength (\(\varepsilon =0.5\) here)
Figure 10 shows the phase portrait for the external hyper-chaotic oscillator. Again it is clear that at high coupling strengths, the dynamics of the hyper-chaotic system becomes regular. Further, the size of the emergent external attractor is very small, though not a fixed point.
Note that when coupling strength \(\varepsilon > \varepsilon _c\), the \((x_\mathrm{ext}-z_\mathrm{ext}-1)\) term in Eq. 4 becomes less than zero, implying that \(G(x_\mathrm{ext}-z_\mathrm{ext})\) is always zero. So the dynamical equations for \(\dot{x}_\mathrm{ext}\) and \(\dot{z}_\mathrm{ext}\) become uncoupled, yielding two independent subsets of equations, with one coupled subset comprising of \(\dot{x}_\mathrm{ext}\) and \(\dot{y}_\mathrm{ext}\) and another coupled subset comprising of \(\dot{z}_\mathrm{ext}\) and \(\dot{w}_\mathrm{ext}\).
6 Conclusions
We investigated the behaviour of an ensemble of uncoupled chaotic oscillators coupled diffusively to an external chaotic system. The common external system may be similar or dissimilar to the group. We explored all possible scenarios, with the intrinsic dynamics of the external system ranging from chaotic to hyper-chaotic. Counter-intuitively, we found that an external system manages to successfully steer a group of chaotic oscillators on to steady states at sufficiently high coupling strengths when it is dissimilar to the group, rather than identical. So while the group of oscillators coupled to an identical external system synchronizes readily, surprisingly enough, control to fixed states is achieved only if the external oscillator is dissimilar. We indicate the generality of this phenomenon by demonstrating the suppression of chaotic oscillations by coupling to an external hyper-chaotic system.
Further, for the case of coupling to a non-identical external system, we quantified the efficacy of control by estimating the fraction of generic random initial states where the intrinsic chaos of the oscillators is suppressed to fixed points, a measure analogous to basin stability. We showed that there was a sharp transition to complete control, where the spatiotemporal fixed point is a global attractor, after a critical coupling strength.
In summary, our results demonstrate robust control of a group of chaotic oscillators to fixed points, by diffusive coupling to a dissimilar external chaotic system. This suppression of chaos occurs for arbitrarily large groups of chaotic oscillators at the same critical coupling strength, indicating that coupling to just one external chaotic system can suppress the intrinsic chaos of a large set of chaotic oscillators. We thus suggest a way in which chaos in natural systems may potentially be tamed, and our observations may also be used in design of potent control strategies in engineering contexts.
References
Storace, M., Linaro, D., de Lange, E.: The Hindmarsh–Rose neuron model: bifurcation analysis and piecewise-linear approximations. Chaos 18, 033128 (2008)
Shilnikov, S.: Complete dynamical analysis of a neuron model. Nonlinear Dyn. 68, 305–328 (2012)
Ma, J., Wang, C.N., Jin, W.Y., Wu, Y.: Transition from spiral wave to target wave and other coherent structures in the networks of Hodgkin–Huxley neurons. Appl. Math. Comput. 217, 3844–3852 (2010)
Maruthi, P.K., Jampa, A., Sonawane, R., Gade, P.M., Sinha, S.: Synchronization in a network of model neurons. Phys. Rev. E 75, 026215 (2007)
Osipov, G.V., Kurths, J., Zhou, C.: Synchronization in Oscillatory Networks. Springer, Berlin (2007)
Buzsaki, G., Draguhn, A.: Neuronal oscillations in cortical networks. Science 304, 1926–1929 (2004)
Bar-Eli, K.: On the stability of coupled chemical oscillators. Phys. D 14, 242–252 (1985)
Dolnik, M., Epstein, I.R.: Coupled chaotic chemical oscillators. Phys. Rev. E 54, 3361 (1996)
Tsaneva-Atanasova, K., Zimliki, C.L., Bertram, R., Sherman, A.: Diffusion of calcium and metabolites in pancreatic islets: killing oscillations with a pitchfork. Biophys. J. 90, 3434–3446 (2006)
Koseska, A., Volkov, E., Kurths, J.: Parameter mismatches and oscillation death in coupled oscillators. Chaos 20, 023132 (2010)
Ozden, I., Venkataramani, S., Long, M.A., Connors, B.W., Nurmikko, A.V.: Strong coupling of nonlinear electronic and biological oscillators: reaching the “amplitude death” regime. Phys. Rev. Lett. 93, 158102 (2004)
Kamal, N.K., Sinha, S.: Emergent patterns in interacting neuronal sub-populations. Commun. Nonlinear. Sci. Numer. Simul. 22, 314–320 (2015)
Ma, J., Song, X., Jin, W., Wang, C.: Autapse-induced synchronization in a coupled neuronal network. Chaos Solitons Fractals 80, 31–38 (2015)
Wei, M., Lun, J.: Amplitude death in coupled chaotic solid-state lasers with cavity-configuration-dependent instabilities. Appl. Phys. Lett. 91, 061121 (2007)
Kim, M.Y., Roy, R., Aron, J.L., Carr, T.W., Schwartz, I.B.: Scaling behavior of laser population dynamics with time-delayed coupling: theory and experiment. Phys. Rev. Lett. 94, 088101 (2005)
Kumar, P., Prasad, A., Ghosh, R.: Stable phase-locking of an external-cavity diode laser subjected to external optical injection. J. Phys. B At. Mol. Opt. Phys. 1, 35402 (2008)
Johns, D.C., Marx, R., Mains, R.E., O’Rourke, B., Marbàn, E.: Inducible genetic suppression of neuronal excitability. J. Neurosci. 19(5), 1691–1697 (1999)
Selkoe, D.J.: Toward a comprehensive theory for Alzheimer’s disease. Hypothesis: Alzheimer’s disease is caused by the cerebral accumulation and cytotoxicity of amyloid \(\beta \)-protein. Ann. N. Y. Acad. Sci. 924, 17–25 (2000)
Tanzi, R.E.: The synaptic A\(\beta \) hypothesis of Alzheimer disease. Nat. Neurosci. 8, 977–979 (2005)
Caughey, B., Lansbury Jr., P.T.: Protofibrils, pores, fibrils, and neurodegeneration: separating the responsible protein aggregates from the innocent bystanders. Annu. Rev. Neurosci. 26, 267–298 (2003)
Ditto, W.L., Sinha, S.: Exploiting the controlled responses of chaotic elements to design configurable hardware. Philos. Trans. R. Soc. A 364, 2483–2494 (2006)
Pun, J., Semercigil, S.E.: Joint stiffness control of a two-link flexible arm. Nonlinear Dyn. 21, 173–192 (2000)
Meehan, P.A., Asokanthan, S.F.: Control of chaotic motion in a spinning spacecraft with a circumferential nutational damper. Nonlinear Dyn. 17, 269–284 (1998)
Bhoir, N., Singh, S.N.: Output feedback modular adaptive control of a nonlinear prototypical wing section. Nonlinear Dyn. 37, 357–373 (2004)
Pratt, J.R., Nayfeh, A.H.: Design and modeling for chatter control. Nonlinear Dyn. 19, 49–69 (1999)
Wu, Y., Su, H., Shi, P., Shu, Z., Wu, Z.G.: Consensus of multiagent systems using aperiodic sampled-data control. IEEE Trans. Cybern. (2015). doi:10.1109/TCYB.2015.2466115
Wu, Y., Su, H., Shi, P., Lu, R., Wu, Z.G.: Output synchronization of nonidentical linear multiagent systems. IEEE Trans. Cybern. (2015). doi:10.1109/TCYB.2015.2508604
Wu, Y.Q., Su, H., Lu, R., Wu, Z.G., Shu, Z.: Passivity-based non-fragile control for Markovian jump systems with aperiodic sampling. Syst. Control Lett. 84, 35–43 (2015)
Resmi, V., Ambika, G., Amritkar, R.E.: General mechanism for amplitude death in coupled systems. Phys. Rev. E 84, 046212 (2011)
Menck, P.J., Heitzig, J., Marwan, N., Kurths, J.: How basin stability complements the linear-stability paradigm. Nat. Phys. 9, 89–92 (2013)
Author information
Authors and Affiliations
Corresponding author
Appendix: stability analysis
Appendix: stability analysis
We investigate the linear stability of the steady state obtained when a group of intrinsically chaotic Rössler oscillators is coupled to a common external intrinsically chaotic Lorenz system, via the eigenvalues of the Jacobian matrix evaluated at those fixed points. Specifically, the Jacobian for N number of oscillators and an external oscillator is given by \(3(N+1) \times 3(N+1)\) matrix. Calculating each term using Eqn. (1) and (3), we obtain the Jacobian matrix to be:
At each coupling strength, there is a set of \(3(N+1)\) eigenvalues of the Jacobian. We show the maximum real part \(\lambda _\mathrm{max}\) of the eigenvalues as a function of coupling strength \(\varepsilon \) in Fig. 11a. Naturally, since the group of oscillators and the external oscillator are intrinsically chaotic, \(\lambda _\mathrm{max} > 0\) for \(\varepsilon = 0\). However, it is clear that at a critical value of coupling \(\varepsilon _c\) all eigen values are negative, indicating that all the oscillators in the group and the external system go to stable fixed points (cf. Fig. 11a). Note that the \(\varepsilon _c\) obtained through linear stability analysis is smaller than that observed from generic random initial states, as displayed in the bifurcation plots. So we undertook additional numerical simulations from initial states sufficiently close to the fixed point solutions and verified that for such close-by initial conditions the fixed point state is indeed stable at lower coupling strengths, in accordance with that seen in Fig. 11a.
Further, from Fig. 11b it is clear that \(\lambda _\mathrm{max}\) increases linearly with increasing parameter r in the external Lorenz system (cf. Eq. 3). This supports the numerical observations that the critical coupling strength \(\varepsilon _c\) increases linearly with r, as displayed in Fig. 6.
Rights and permissions
About this article

Cite this article
Chaurasia, S.S., Sinha, S. Suppression of chaos through coupling to an external chaotic system. Nonlinear Dyn 87, 159–167 (2017). https://doi.org/10.1007/s11071-016-3033-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-016-3033-5