
Abstract
There are many types of oscillators and many different circuit configurations that produce oscillations. Some oscillators produce sinusoidal signals, and others produce nonsinusoidal signals. Nonsinusoidal oscillators, such as pulse and ramp (or sawtooth) oscillators, find use in timing and control applications. Pulse oscillators are commonly found in digital-systems clocks, and ramp oscillators are found in the horizontal sweep circuit of oscilloscopes and television sets. Sinusoidal oscillators are used in many applications, for example, in consumer electronic equipment (such as radios, TVs, and VCRs), in test equipment (such as network analyzers and signal generators), and in wireless systems. There are two widely used methods of oscillator amplitude control. In the first method, the oscillator active element has a nonlinear characteristic of the limiting type. In the second method the oscillator active element has linear control of gain. In this paper a new method of control based on state energy concept is proposed. It will show that system controlled by a linear controller with energy feedback can generate different types of signals. Depending on parameters of the controller the generated output signal can be sinusoidal, nonsinusoidal, or even chaotic. A new chaotic attractor was found by means of state energy feedback.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Oscillations and waves are ubiquitous phenomena that are encountered in many different areas of physics. An oscillation is a disturbance in a physical system that is repetitive in time. A wave is a disturbance in an extended physical system that is both repetitive in time and periodic in space. In general, an oscillation involves a continuous back and forth flow of energy between two different energy types: e.g., kinetic and potential energy, in the case of a pendulum. A wave involves similar repetitive energy flows to an oscillation, but, in addition, is capable of transmitting energy and information from place to place. Now, although sound waves and electromagnetic waves, for example, rely on quite distinct physical mechanisms, they, nevertheless, share many common properties. The same is true of different types of oscillation. It turns out that the common factor linking various types of wave is that they are all described by the same mathematical equations. Again, the same is true of various types of oscillation. In some circumstances the system can be chaotic. Chaotic motions are behavior of some nonlinear systems (at least third order or higher) with “floating” frequency, amplitude, and unregular (non periodic) energy variations. For example, in physics, jerk is the third derivative of position. It has been shown that a jerk equation, which is equivalent to a system of three first orders, ordinary, nonlinear differential equation is in a certain sense the minimal setting for solutions showing chaotic behavior. This motivates mathematical interest in jerk systems. Systems involving a fourth or higher derivative are called accordingly hyperjerk systems.
Chaos theory studies the behavior of dynamical systems which are nonlinear, highly initial condition sensitive, having deterministic (rather than probabilistic) underlying rules which every future state of the system must follow. Such systems exhibit aperiodic oscillations in the time series of state variables. It has a large or infinite number of unstable periodic patterns which is commonly termed as order in disorder. Long-term prediction is almost impossible due to the sensitive dependence on initial conditions. Though such effect may seem quite unusual, it is however observed in very simple systems, for example, a ball placed at the crest of a hill might roll into different valleys depending on slight difference in the initial position. Most common chaotic phenomenon is observed in case of regular weather prediction. Other application of chaos theory is pervaded in many fields like geology, mathematics, biology, microbiology, computer science, economics, philosophy, politics, population dynamics, psychology, and robotics. Some real-world applications of chaotic time series are computer networks, data encryption, information processing, pattern recognition, economic forecasting, market prediction, etc. [1–3].
In this paper it will shown that system controlled by a linear controller (PI controller, P—proportional, I—integrative) with energy feedback (nonlinear) can generate required types of signals. Depending on parameters of the controller the generated output signal can be sinusoidal, quasi-periodic, or even chaotic.
2 The state energy approach
Let us consider a class of finite dimensional nonlinear systems described in the following form
where the matrix C(x), defining the output measurement, is not a’priori specified, and the structure of matrices A(x) (tridiagonal)
We start with presentation of some basic ideas of the state space energy-based approach [4–6]. Let \(P_{0}(t)\) denotes the output dissipation power of a zero input causal system with an informational output y(t) defined by
Let E(t) denotes the instantaneous value of the state space energy (stored in a state vector x(t)):
The state space energy conservation principle holds
where \({\psi }\) is the gradient vector of the state space energy potential field E, f is the state space velocity vector, and \(\langle .,. \rangle \) denotes the operation of dual product.
Because the choice of origin and that of the state space coordinate system is free, we can define the gradient \({\psi }(x)\) of the energy E in its most simple form:
where n is the order of the system representation. In some situations it may be useful to consider the integral of E(x) as an additional concept of the state space hyper-energy J, which, divided by the length of interval \(T=[t_{0},t_{1}]\), defines a mean value of the E(x).
3 Dissipative system structures
Recall that according to Liouville’s theorem of vector analysis, dissipative systems have the important property that any volume of the state space strictly decreases under the action of the system flow. For linear as well as nonlinear systems with state velocity vector given by a vector field f, the property of dissipativity is defined:
Thus a system defined by a matrix A(x) is dissipative if the matrix A(x) has negative trace.
It follows from the state space energy conservation principle that a special form of a structurally dissipative state equivalent system representation called generalized dissipation normal form can easily be derived. Its internal structure is determined by the tridiagonal matrix (2).
The structure of this representation is shown in Fig. 1. It is completely characterized by minimal number of independent (internal) state energy storage elements, represented by minimal number of state variables.

Structure of the dissipation normal form
In some cases not only the state minimality, but also a property of parametric minimality is required. In the important special case of parametrically minimal system representation the internal structure reduces to:
Because the derived system structure satisfies the abstract form of state energy conservation principle, we call it physically correct. It is worthwhile to notice that any of internal or external power-informational interactions, as depicted in Fig. 1, may be nonlinear with respect to state and input variables.
System representations with zero divergence
preserve volume along state trajectories and are referred to as conservative. Locally linearized dissipative systems in a vicinity of an equilibrium state need not be globally dissipative. If a representation is neither dissipative nor conservative, instability appears.
Following elementary consequences of the state space energy conservation principle for parametrically minimal dissipation structure are in order [7, 8]:
-
1.
\(\alpha _{11} > 0\) is necessary and sufficient for dissipativity
-
2.
\(\alpha _{11} < 0 \) is sufficient for structural instability
-
3.
\(\alpha _{11} = 0 \) is necessary and sufficient for conservativity
-
4.
\(\alpha _{11}> 0\) is necessary for asymptotic stability
-
5.
\(\forall _i,j \in \left\{ 2,3,\ldots ,n\right\} :\alpha _i \ne o, \alpha _{11}\ne 0\) is equivalent to parametric and state minimality
-
6.
\(\forall _i,j \in \left\{ 2,3,\ldots ,n\right\} :\alpha _i \ne o, \beta _{1}\ne 0\) is equivalent to structural controlability
-
7.
\(\forall _i,j \in \left\{ 2,3,\ldots ,n\right\} :\alpha _i \ne o, \gamma _{1}\ne 0\) is equivalent to structural observability
-
8.
\(\forall _i,j \in \left\{ 2,3,\ldots ,n\right\} :\alpha _i \ne o, \alpha _{11}\ne 0\) is equivalent to structural asymptotic stability
where matrices B, C are
4 The state energy feedback
In this part we try to attack the “problem of oscillations” not from the standard “observation of reality point of view,” but from the opposite direction, i.e., we intend to develop a consistent approach to the real-world situations from a “generation of controlled oscillations point of view.” The objective is to stabilize the state space energy E(t) on any prescribed value \(E^{*}\) by means of a linear controller, but under the assumption that instead of the measured output signal y(t), the information about the actual value of the state space energy E[x(t)] is assumed to be available to the controller [9, 10].
At least the following three interpretations are natural:
-
either the state space energy is continuously measured, and a standard linear “output error” controller is used, where not the informational output \(y(t\}\), but the integrated output dissipation power is used in the feedback informational channel,
-
or the actual state vector x(t) is continuously measured and used in the feedback informational channel; then, the corresponding actual value of the state space energy is computed and a standard linear “output error“ controller is used,
-
or the actual values of the input u(t) and that of the output y(t) are continuously measured and used in the feedback informational channel, including a state reconstructor and a state energy error controller.
The structure for single-input single-output system with nonlinear part of controller is shown in Fig. 2.
The proportional-integral (PI) controller based on state space energy is shown in Fig. 3, where E is prescribed value of energy and \(x_{i}^{2 }\) is state space variable (the total state space energy is given by Eq. 6).
Let us start with analysis of the state representation Eq. (1) where the information about the system structure is contained in the triple of matrices (A, B, C), where the diagonal elements of the matrix A represent the dissipation parameters, the off-diagonal elements represent the internal interaction parameters between both the first-order subsystems, and the elements of the matrices B and C represent the parameters of external interactions. Typical solutions of the state energy error control problem are illustrated by simulation results: harmonic oscillations and generation of chaotic oscillations (by the same systems, only control parameters will change).

Linear system with nonlinear part of controller and the state vector measurement

Block diagram of PI controller based on state space energy control
The block diagram of linear quadrature oscillator with 2 dissipations is shown in Fig. 4 (dissipations are \(\alpha _{1}, \alpha _{3})\).

Linear quadrature oscillator with dissipation parameters \(\alpha _{1}, \alpha _{3}\). The frequency is controlled by parameter \(\alpha _{2}\)
This system can be described by second-order system with the dissipation \(\alpha _{1} \alpha _{3}\) and frequency proportional of \(\alpha _{2}\).
Because of dissipativity, without control, the oscillation in this system vanishes after short time which depends on initial conditions and values of dissipative coefficient. Using of different controllers is possible for amplitude stabilization of oscillations [11, 12]. In this paper the new principle based on state space energy was selected. The block diagram of linear quadrature oscillator with proportional-integral controller is displayed in Fig. 5

System 1. The linear quadrature oscillator controlled by a state energy error PI controller
The whole system oscillator with PI controller with nonlinear feedback is represented by
The first equation can be rewritten as

Phase portrait of system 1 for \(k_{i}=0.0015; k_{p}=0.3; \alpha _{1}=0.01; \alpha _{2}=1.4; \alpha _{3}=0.01\)
From this equation it can be seen that system can be dissipative if
or anti-dissipative if
therefore with appropriate control this system can hold desired energy. Based on previous results, the dissipativity/anti-dissipativity is controlled by controller which must hold prescribed energy \(E^{*}\) where state space energy of oscillator is given as
Results depend on proportional and integral gains of PI controller. It will show that for some gain values of PI controller the system can be chaotic but holds (in average) the prescribed energy. The system can be therefore simply switched as sinusoidal oscillator or system with chaotic oscillations.
5 Results of computer simulations
The system according to Fig. 5, described by Eq. (12), was simulated (system 1) for different values of gains of PI controller.
On the first, the prescribed energy was \(E_{1}^{*}=1.5\, ({\hbox {from time}} \,t\in \langle 0\, {\hbox {to}}\, 150\rangle )\) and \(E_{2}^{*}=3 \,({\hbox {from time}}\, t\in (150\, {\hbox {to}}\, 400\rangle )\) with initial conditions \(x_{1}(0)=0.1; x_{2}(0)=0; x_{3}(0)=0\) and \(k_{i}=0.0015; k_{p}=0.3; \alpha _{1}=0.01; \alpha _{2}=1.4; \alpha _{3}=0.01\). For gain values of PI controller the system works as sinusoidal oscillator. The results are shown in Fig. 6 (phase portrait), Fig. 7 (time evolution of state variables), Fig. 8 (time evolution of state space energy), and Fig. 9 (frequency spectrum).

Time evolution of state variables \(x_{1}\) and \(x_{2}\) for system 1 for \(k_{i}=0.0015; k_{p}=0.3; \alpha _{1}=0.01; \alpha _{2}=1.4; \alpha _{3}=0.01\)

Time evolution of the prescribed energy (dash line) and state space energy (solid line) of system 1 for \(k_{i}=0.0015; k_{p}=0.3; \alpha _{1}=0.01; \alpha _{2}=1.4; \alpha _{3}=0.01\)

The frequency spectrum of the state space variable \(x_{1}\) of system 1 for \(k_{i}=0.0015; k_{p}=0.3; \alpha _{1}=0.01; \alpha _{2}=1.4; \alpha _{3}=0.01\)
On the second, the prescribed energy was \(E_{1}^{*}=1.5\, ({\hbox {from time}}\, t\in \langle 0\, {\hbox {to}}\, 150\rangle )\) and \(E_{2}^{*}=1.4\, ({\hbox {from time}}\, t\in (150\, {\hbox {to}}\, 300\rangle )\) with initial conditions \(x_{1}(0)=0.1; x_{2}(0)=0; x_{3}(0)=0\) and \(k_{i}=0.885; k_{p}=0.099;{\alpha }_{1}=1;{\alpha }_{2}=1.4;{\alpha }_{3}=1.4\). For these gain values of PI controller the system works as chaotic system. The results are shown in Fig. 10 (phase portrait), Fig. 11 (time evolution of state variables), Fig. 12 (time evolution of state space energy), and Fig. 13 (frequency spectrum) [11–14].

Phase portrait of system 1 for, \(k_{i}=0.885; k_{p}=0.099; \alpha _{1}=1; \alpha _{2}=1.4; \alpha _{3}=1.4\); and initial conditions \(x_{1}(0)=0.1; x_{2}(0)=0; x_{3}(0)=0\)

Time evolution of state variables \(x_{1}\) and \(x_{2}\) for system 1 for \(k_{i}=0.885; k_{p}=0.099; \alpha _{1}=1; \alpha _{2}=1.4; \alpha _{3}=1.4\)

Time evolution of the prescribed energy (dash line) and state space energy (solid line) of system 1 for \(k_{i}=0.885; k_{p}=0.099; \alpha _{1}=1; \alpha _{2}=1.4; \alpha _{3}=1.4\)

The frequency spectrum of the state space variable \(x_{1}\) of system 1 for for \(k_{i}=0.885; k_{p}=0.099; \alpha _{1}=1; \alpha _{2}=1.4; \alpha _{3}=1.4\)
On the third the similar system was used, but the sign of 2 state variables \(x_{1}, x_{2}\) is changed in time \(t>150\) (by switching signal SW); therefore, “rotation” of the system was reversed (see Fig. 14), [15–18].
The second system (including switching signal) is described by Eq. (17)
The simulation results lead to 4-wing chaotic system (system 2), see phase portrait in Fig. 15 and the next Figs. 16, 17, and 18.

System 2. The dissipative oscillator controlled by a state energy error PI controller with switching sign of coupling signals by multipliers and switching signal SW

Phase portrait of system 2 with reversed rotation, \(k_{i}=0.885; k_{p}=0.099; \alpha _{1}=1; \alpha _{2}=1.4; \alpha _{3}=1.4\)

Time evolution of system 2 with reversed rotation, \(k_{i}=0.885; k_{p}=0.099; \alpha _{1}=1; \alpha _{2}=1.4; \alpha _{3}=1.4\)

The state space energy of system 2 with reversed rotation, \(k_{i}=0.885; k_{p}=0.099; \alpha _{1}=1; \alpha _{2}=1.4; \alpha _{3}=1.4\)

The frequency spectrum of system 2 with reversed rotation, \(k_{i}=0.885; k_{p}=0.099; \alpha _{1}=1; \alpha _{2}=1.4; \alpha _{3}=1.4\)
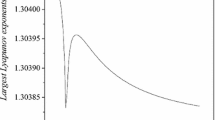
In Table 1 some important characteristic of the both chaotic systems (system1 and 2) is presented (calculated from state variables \(x_{1}\) and \(x_{2})\):
Largest Lyapunov exponent, Hurst exponent, capacity dimension, correlation dimension.
6 Conclusion
In this paper the several types of feedback system based on linear controlled system, linear controller but nonlinear state space feedback were presented and simulated. The theory of state space energy approach was used. Depending on parameters of the controller the system can generate sinusoidal, nonsinusoidal, or even chaotic signal.
References
Song, X.L., Wang, C.N., Ma, J., et al.: Transition of electric activity of neurons induced by chemical and electric autapses. Sci. China Technol. Sci. 58(6), 1007–1014 (2015)
Qin, H.X., Ma, J., Jin, W.Y., et al.: Dynamics of electric activities in neuron and neurons of network induced by autapses. Sci. China Technol. Sci. 57(5), 936–946 (2014)
Ma, J., Song, X.L., Tang, J., Wang, C.N.: Wave emitting and propagation induced by autapse in a forward feedback neuronal network. Neurocomputing 167, 378–389 (2015)
Hill, D.J., Moylan, P.J.: Dissipative dynamical systems: basic input-output and state properties. J. Frankl. Inst. 309(5), 327–357 (1980)
Stork, M., Hrusak, J., Mayer, D.: Nonlinearly Coupled Oscillators and State Space Energy Approach”, 14th WSEAS International Conference on Systems, Corfu Island, 22–24 July 2010, pp. 171–175. ISSN: 1792-4235, ISBN: 978-960-474-199-1 (2010)
Hrusak, J., Stork, M., Mayer, D,: On State Space Energy Controlled Systems with Quantum Chaotic-Like Behavior, WSEAS/NAUN International Conferences, Corfu Island, 14–17 July 2011, pp. 165–170
Hrusak, J., Stork, M., Mayer, D.: On Brayton–Moser network decomposition and state-space energy based generalization of Nosé-Hoover dynamics. WSEAS Trans. Circuits Syst. 10(8), 251–266 (2011). ISSN: 1109–2734
Stork, M., Hrusak, J., Mayer, D.: Energy Based State Space Approach of Nonlinear Systems Simulation and Construction by Means of Electronic Circuits, Recent Researches in Circuits and Systems. In: Proceedings of the 16th WSEAS International Conference on Systems, pp. 78–84. ISBN: 978-1-61804-108-1 (2012)
Mayer, D., Hrusak, J., Stork, M.: On state-space energy based generalization of Brayton–Moser topological approach to electrical network decomposition. Springer, Computing, Berlin (2013)
Stork M., Hrusak, J., Mayer, D.: On Synthesis Realization and Simulation Non-degenerate Dissipative Structures. In: Recent Advances in Telecommunications and Circuit Design, WSEAS/NAUN International Conferences Rhodes Island, 16–19 July 2013, pp. 49–56
Astolfi, A., Ortega, R., Sepulchre, R.: Stabilization and disturbance attenuation of nonlinear systems using dissipativity theory. Eur J Control 8(5), 408–433 (2002)
Jeltsema, D.: Modeling and Control of Nonlinear Networks: A Power-Based Perspective. Delft University of Technology, Delft (2005). Ph.D. dissertation
Mancini, R., Palmer, R.: Sine-Wave Oscillator, Application Report SLOA060-March 2001, Texas Instruments
Lindberg, E.: Oscillators—An Approach for a Better Understanding, Invited tutorial. In: Proceedings of the European Conference on Circuit Theory and Design 2003, ECCTD‘03, Cracow, 1–4 Sep 2003
Lu, J., Zhou, T., Chen, G., Yang, X.: Generating chaos with a switching piecewise-linear controller. Chaos 12(2), 344–349 (2002)
Liu, W., Tang, W.K.S., Chen, G.: 2 \(\times \) 2-Scroll attractors generated in a three-dimensional smooth autonomous system. Int. J. Bifurc Chaos 17(11), 4153–4157 (2007)
Lu, J., Chen, G.: Generating multi-scroll chaotic attractors: theories, methods and applications. Int. J. Bifurc. Chaos Appl. Sci. Eng. 16(4), 775–858 (2006)
Dadras, S., Momeni, H.R.: A novel three-dimensional autonomous chaotic system generating two, three and four-scroll attractors. Phys. Lett. A 373(40), 3637–3642 (2009)
Acknowledgments
This work was supported by the European Regional Development Fund and the Ministry of Education, Youth and Sports of the Czech Republic under the Regional Innovation Centre for Electrical Engineering (RICE), Project No. CZ.1.05/2.1.00/03.0094, and by the Internal Grant Agency of University of West Bohemia in Pilsen, the Project SGS-2015-002 and GA15-22712S.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Stork, M. Energy feedback used for oscillators control. Nonlinear Dyn 85, 871–879 (2016). https://doi.org/10.1007/s11071-016-2729-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-016-2729-x