
Abstract
In this article, the issue of adaptive neural fixed-time tracking control for uncertain robotic manipulators subject to input saturation, external disturbance and prescribed constraints is studied. To handle the influence of input saturation, a novel auxiliary nonlinear dynamic system is constructed in which the system state is fixed-time stable. Radial basis function neural networks (RBF NNs) are used to approximate the system uncertainty. Instead of adjusting all weight vectors of RBF NNs, only one parameter is needed to be updated online. Then, based on performance function and auxiliary dynamic system, a fixed-time sliding mode controller with prescribed transient and steady-state performance is developed. Through theoretical analysis, it is concluded that the position tracking error can stabilize around the equilibrium point in fixed time and satisfy the prescribed requirements. Meanwhile, all signals in the closed-loop system are proved to be fixed-time stable by using the Lyapunov method. Finally, simulation results are presented to demonstrate the effectiveness of the proposed method.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Due to technological advancement in recent years, robotic manipulators have been extensively used in various areas, such as industrial manipulators, aerospace manipulators and so on. For industrial applications like loading and unloading workpieces, assembling parts and sorting goods, the requirements for the trajectory tracking accuracy and control performance of robotic manipulators are constantly increasing. In order to meet these demands, it is necessary to realize the precise motion control of the manipulator, which has attracted great attention from the academic and engineering circles [1,2,3,4]. However, designing a fast tracking controller for a robotic manipulator remains challenging due to the uncertainty of the manipulator system, input saturation and prescribed tracking error constraints.
The robotic manipulator system is characterized by inherent nonlinearity and physical constraints of components, which brings great difficulty for tracking controller design. Lots of good schemes have been proposed such as PID control [5], feedback linearization [6], model predictive control [7], sliding mode control [8,9,10,11,12], optimal control [13, 14] and robust control [15]. Among these control strategies, sliding mode control is widely used because of its robustness to external disturbances. However, the linear sliding manifold can only achieve asymptotic convergence of the system state, which means that high gains are required to achieve rapid state convergence. Because of this issue, some nonlinear sliding mode surfaces are proposed such as terminal sliding mode [16], nonsingular terminal sliding mode [17] and fast nonsingular terminal sliding mode [18, 19]. [18] proposed a fast nonsingular terminal sliding mode controller with a disturbance observer for permanent magnet linear motors. In [19], an integral fast nonsingular terminal sliding mode surface was introduced for robotic manipulators and proposed a novel backstepping sliding mode controller. It should be pointed out that the finite-time stability of [18] and [19] is proved by using the Lyapunov method. Recently, a so-called fixed-time sliding mode controller is proposed in the literature [20,21,22]. The biggest difference between the fixed-time stability and the finite-time stability is the settling time of the closed-loop system. To be more specific, the settling time of the finite-time stability depends on the initial conditions and will change when different initial conditions are selected. However, the settling time of the fixed-time stability is not affected by initial conditions, which implies that the settling time of the fixed-time stability is bounded and only depends on the design parameters. Paper [20] proposed an integral fixed-time sliding mode control algorithm for permanent magnet synchronous motor with a disturbance estimation compensation. The speed tracking error was proved to be fixed-time stable based on the Lyapunov method. In [21] a fixed-time disturbance observer-based tracking controller was presented for the n-DOF manipulators and Barrier Lyapunov Function was used to ensure the prescribed performance of the tracking errors. A fault-tolerant fixed-time trajectory tracking control scheme was introduced for marine surface vessels in [22]. The aforementioned results can ensure the fixed-time stability of the closed-loop system, but all controllers are designed based on the system model. It should be pointed out that for robotic manipulators, the nominal parts of the system model may not be available. Therefore, how to design a fixed-time controller for a robotic manipulator with system uncertainty is still a problem to be solved.
Dynamic uncertainty always appears in robotic manipulator systems, which will cause great problems when designing a trajectory tracking controller. Therefore, the influence of uncertainty on the design of industrial manipulator controllers cannot be ignored. The dynamic uncertainty indicates that we cannot obtain the accurate mathematical model of the system for controller design and how to improve the tracking performance of the uncertain robotic manipulator is still a challenge for the research community. On purpose to handle the uncertainty of mechanical systems, many approaches had been put forward such as fuzzy control [23, 24] and neural networks control [25, 26]. Owing to its universal approximation property, neural networks have been extensively used to approximate unknown dynamics. Considering the system uncertainty and time-varying output constraints, [27] proposed a model-based control scheme and an adaptive neural networks control scheme for robotic manipulators. Paper [28] used neural networks to handle the system uncertainty and input dead zone, both the state-feedback controller and output-feedback controller were introduced. However, only asymptotic convergence or uniformly ultimately bounded is achieved in [26,27,28]. Therefore, designing a fixed-time neural adaptive controller for an uncertain manipulator system is the purpose of this paper.
Although much great progress has been made in trajectory tracking controller design for robotic manipulators, most control schemes are developed due to the hypothesis that controllers are working in good conditions. However, many control systems are subjected to physical limitations and how to handle these constraints of the system in the controller design process has become a hot research issue. Limited by the physical properties of components, input saturation always appears in mechanical systems. Therefore, it is inevitable to reckon input saturation nonlinearity in concrete applications. Controller design with input saturation for nonlinear systems had been considered by researchers and many great methods had been proposed. For uncertain mobile robot systems with input saturation, [29] proposed a novel adaptive neural controller and used a dynamic system to compensate input saturation. Tracking errors of the system were proved to be asymptotically convergent. In [30], an auxiliary system was employed to reduce the influence of input saturation and a fuzzy controller was introduced for nonstrict-feedback stochastic nonlinear systems under input saturation. [31] presented a neural controller for a pure-feedback stochastic MIMO nonlinear system with input saturation and full state constraints. The proposed controller decreased the influence of input saturation by citing an asymmetric smooth model and achieved a smooth saturation limitation. By applying smooth hyperbolic functions, [32] proposed a boundary controller for flexible manipulators subject to input saturation. According to the above literature, nearly no study has tackled the fixed-time anti-saturation control problem for robotic manipulators.
For many practical systems, it is necessary to design a reasonable controller to make the trajectory tracking error satisfies performance requirements, such as realizing the tracking error convergence to an arbitrarily small residual set, error convergence speed not less than a preset value, and the maximum overshoot less than a certain constant. In order to design a controller to achieve the above performance requirements, Bechlioulis and Rovithakis [33] first proposed a prescribed performance controller for nonlinear systems. By introducing performance function, the prescribed performance control method can specify the transient performance and steady-state performance of trajectory tracking error and have been successfully extended to a variety of different applications such as quadrotor [34], DC converter system [35], rigid satellite [36], space manipulators [37] and other fields [38,39,40,41]. However, the existing prescribed performance control results cannot guarantee the fixed-time stability of tracking error, and cannot meet the requirements of the control accuracy and convergence time of the manipulator system subject to input saturation.
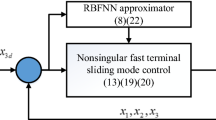
In this paper, an adaptive neural fixed-time sliding mode controller is created for a class of uncertain robotic manipulators subject to input saturation and prescribed constraints. An auxiliary nonlinear dynamic system is introduced to handle the input saturation nonlinearity, RBF NNs are used to approximate the closed-loop dynamic uncertainty and the performance of trajectory tracking error is ensured by a performance function. Compared with former results, the advantages of our controller are
-
1.
A novel auxiliary nonlinear dynamic system is constructed to deal with the influence of input saturation. Different from the auxiliary system proposed in [29] and [30], the fixed-time stability of the auxiliary system state is proved by using the Lyapunov method.
-
2.
A neural adaptive fixed-time sliding mode control method is proposed based on auxiliary dynamic system and performance function. Under the physical limitation, the proposed scheme can ensure the trajectory tracking error satisfies the prescribed performance and converge to a smaller neighborhood of the origin within a fixed time.
-
3.
RBF NNs are used to approximate the uncertainty of the closed-loop system. Different from most neural controllers that update all weight elements online [25,26,27,28], this paper uses the norm of the weight matrix as adaptive parameter. Therefore, the parameter that need to be adjusted is decreased to one, which can reduce the calculation burden.
The remaining parts are ordered as the following arrangements: Sect. 2 provides some lammes and control objective of this article. The adaptive neural fixed-time tracking control approach is designed and stability discussion is introduced in Sec. 3. Simulation results are shown in Sect. 4 to verify the good performance of the present controller. Moreover, in Sect. 5, we complete this paper with some conclusions.
1.1 Notations
In this paper, \(Sig^\alpha (\zeta )=\left[ \vert \zeta _1 \vert ^\alpha \mathrm{sign} (\zeta _1),\vert \zeta _2 \vert ^\alpha \mathrm{sign}(\zeta _2),\dots ,\vert \zeta _n \vert ^\alpha \mathrm{sign}(\zeta _n)\right] ^T\) and \(D^\alpha (\zeta )=\mathrm{diag}\left\{ \vert \zeta _1 \vert ^\alpha ,\vert \zeta _2 \vert ^\alpha ,\dots ,\vert \zeta _n \vert ^\alpha \right\} \) where \(\alpha >0\) and \(\zeta =\left[ \zeta _1,\zeta _2,\dots ,\zeta _n\right] ^T\). \(\vert \zeta _i \vert \) and \(\Vert \zeta \Vert \) denote the absolute value and Euclidean norm, respectively. \(\Vert A \Vert _F\) represents the Frobenius norm and \(\lambda _\mathrm{min}(A)\), \(\lambda _\mathrm{max}(A)\) denote the minimum eigenvalue and maximum eigenvalue of matrix A, respectively.
2 Problem Formulation
2.1 Dynamic Model of Robotic Manipulator
The dynamics of n-link robotic manipulator system in joint space can be expressed as
where \( M(q)\in \mathcal {R}^{n \times n} \) denotes the inertia matrix. \( C(q,\dot{q})\in \mathcal {R}^{n \times n} \) represents the Coriolis and centrifugal matrix. \( G(q)\in \mathcal {R}^{n} \) represents the gravity force. q, \(\dot{q}\), \(\ddot{q}\in \mathcal {R}^{n} \) are the vectors of the manipulator position, velocity and acceleration, respectively. \( \tau _d\in \mathcal {R}^{n} \) represents external disturbance which is upper bounded by \(\Vert \tau _d \Vert \le \tau _d^*\). In this paper, we assume that \(\tau _d^*\) is unknown. \( u(v)\in \mathcal {R}^{n} \) represents manipulator input subject to saturation nonlinearity and can be expressed as
where v denotes the designed control input. The constant \(u_\mathrm{max}\) denotes the given bound of saturation nonlinearity. Define \( \varDelta u = u(v)-v \) and assume that \( \Vert \varDelta u \Vert \le U \) where U is a known constant.
In this paper, assume that M(q), \(C(q,\dot{q})\) and G(q) in (1) are totally unknown, which means that the nominal values and the actual values of the system dynamics cannot be used in the controller design process. Thus, to facilitate the design of the controller, a designed positive diagonal matrix \(M_0\) is introduced and equation (1) can be rewritten as
2.2 Preliminaries
In order to design a fixed-time controller for the robotic manipulator system (1), some useful definitions and lemmas are presented in this subsection.
Definition 1
[42] Consider the following nonlinear system
where \(x\in \mathcal {R}^{n}\) and \(g \in \mathcal {R}^+ \times \mathcal {R}^{n} \rightarrow \mathcal {R}^{n}\) are nonlinear functions. The origin of the system (4) is said to be fixed-time stable if for any initial condition \(x_0\), the system state reach the origin at \(T(x_0)\), i.e. \(\lim _{t \rightarrow T(x_0)} x(t)=0\) and there exists a constant \(T_\mathrm{max} \in \mathcal {R}^+\) such that \(T(x_0) \le T_\mathrm{max}\).
Lemma 1
[43] For a selected Lyapunov function V(x) such that
where \(\alpha \), \(\beta \) are positive constants and m, n, p, q are odd integers satisfying \(m>n\), \(p<q\). Then, the origin of (4) is fixed-time stable and the settling time is
Lemma 2
[44] For a selected Lyapunov function V(x) such that
where \(\alpha \), \(\beta \), \(\varsigma \) are positive constants and m, n, p, q are odd integers satisfying \(m>n\), \(p<q\). Then, the origin of (4) is practical fixed-time stable and the settling time is
where \(0<\delta <1\). The residual set of (7) is given by
Lemma 3
[45] For any \(a > 1\) we have the following inequality
and if \(0<a \le 1\) we have
where N is a positive constant and \(y_i>0\).
Lemma 4
[45] For any \(a\ge 0\), \(b>0\) and \(c>0\), the following inequality holds
Lemma 5
[45] For any \(a>0\), \(b \le a\) and \(c>1\), the following inequality holds
2.3 RBF NNs
In this article, RBF NNs are used to approximate the unknown dynamics of the manipulator. According to Park and Sandberg [46], a continuous unknown function f(Z) approximated by RBF NNs can be written as
where \(w^{*} \in \mathcal {R}^{p_1 \times m_1}\) denotes the ideal weight matrix. \(\phi (Z)=\left[ \phi _1(Z),\phi _2(Z),\ldots ,\phi _{p_1}(Z)\right] ^T\) is the basis function vector and \(\phi _i(Z)\) for \(i=1,2,\ldots ,p_1\) are Gaussian functions, such that \(\phi _i(Z)=\exp \left( \frac{-\Vert Z-\xi _i \Vert ^2}{\eta _i^2}\right) \) where Z represents the input of RBF NNs, \(\xi _i\) and \(\eta _i\) represent the receptive field center and width of the Gaussian function, respectively. \(\epsilon \) denotes the approximation error and \(\Vert \epsilon \Vert \le \epsilon ^*\) with \(\epsilon ^* \ge 0\).
2.4 Control Objective
In this article, the control objective is to design an adaptive neural fixed-time sliding mode trajectory tracking control approach for a class of uncertain robotic manipulators to achieve the following requirements
-
1.
Under the effect of input saturation, the system output q tracks the desired trajectory \(q_d\) in fixed time.
-
2.
Tracking error will satisfy the prescribed performance requirements and all signals in the closed-loop system are fixed-time stable.
3 Controller Development
In this section, the adaptive neural fixed-time sliding mode control approach is designed for the robotic system (1). A novel fixed-time auxiliary dynamic system is designed to deal with input saturation. The prescribed performance method is used to make tracking error satisfies the prescribed constraints. All signals in the closed-loop system are proved to be fixed-time stable.
3.1 Prescribed Performance and Error Transformation
Considering system dynamics (3), define \(x_1=q\) and \(x_2=\dot{q}\), thus equation (3) can be written as
where \(f(Z)=-\left( M(x_1)-M_0\right) \dot{x}_2- C(x_1,x_2)x_2-G(x_1)\). Let \(z_1=x_1-q_d\) and \(z_2=x_2-\dot{q}_d\) where \(z_1=\left[ z_{11},z_{12},\dots ,z_{1n}\right] ^T\) denotes angular tracking error and \(z_2=\left[ z_{21},z_{22},\dots ,z_{2n}\right] ^T\) denotes angular velocity error. Assuming that \(z_1\) satisfies the prescribed performance such as
where \(k_{1i}\) and \(k_{2i}\) are positive design constants and \(\sigma _i(t)\) is the performance function which can be written as
where \(\sigma _i(0)>\sigma _i(\infty )>0\) and \(\varpi _i>0\) are designed parameters that based on the performance requirements. We can see from (17) that the performance function \(\sigma _i(t)\) is exponential decreasing and the decreasing rate is adjustable by \(\varpi _i\).
In order to achieve trajectory tracking control with prescribed performance, a performance transformation method is introduced to transform the constrained error \(z_{1i}\) into an equivalent unconstrained error \(S_{1i}\). Define
where \(T_{1i}(S_{1i})\) is a smooth and strictly increasing function with \(\lim _{S_{1i} \rightarrow -\infty }T_{1i}(S_{1i})=-k_{1i}\) and \(\lim _{S_{1i} \rightarrow +\infty }T_{1i}(S_{1i})=k_{2i}\). In this paper we choose the trasnformed function \(T_{1i}(S_{1i})\) as
From (18) and (19), the transformed unconstrained error can be expressed as
Differentiating (20) along time we have
where \(h_i=\frac{1}{2\sigma _i(t)}\frac{k_{1i}+k_{2i}}{\left( k_{1i}+\frac{z_{1i}}{\sigma _i(t)}\right) \left( k_{2i}-\frac{z_{1i}}{\sigma _i(t)}\right) }\) and \(h_i>0\). Thus the vector form of (21) can be given as
where \(S_1=\left[ S_{11},S_{12},\dots ,S_{1n}\right] ^T\), \(H=\mathrm{diag}\left\{ h_1,h_2,\dots ,h_n\right\} \) and \(\varPsi =\mathrm{diag}\left\{ {\frac{\dot{\sigma }_1(t)}{\sigma _1(t)},\frac{\dot{\sigma }_2(t)}{\sigma _2(t)},}\right. \left. {\dots ,\frac{\dot{\sigma }_n(t)}{\sigma _n(t)}}\right\} \). Define \(S_2=z_2-\varPsi z_1\),thus (22) can be expressed as
3.2 Fixed-time Auxiliary Nonlinear Dynamic System
How to design a fixed-time auxiliary dynamic system to handle the effect of input saturation is the main difficulty in this part. Therefore, to solve this problem, we propose the following auxiliary system
where \(\hbar \) is the state parameter of the auxiliary dynamic system, \(H_1\) and \(H_2\) are designed diagonal matrices, \(m_1\), \(n_1\), \(p_1\), \(q_1\) are odd integers satisfying \(m_1>n_1\), \(p_1<q_1\).
Theorem 1
Considering the auxiliary nonlinear dynamic system (24), the system state \(\hbar \) is fixed-time stable and the settling time \(T_1\) satisfies
Proof
Choosing the Lyapunov function candidate as
taking the time derivative of (26) and combine with (24) we have
From some basic mathematical derivation, it can be seen that \(\hbar ^TUM_0^{-1}\mathrm{sign}(\hbar )-\hbar ^TM_0^{-1}(u(v)-v) \ge 0\), thus we have
Based on Lemma 1, the fixed-time convergence of the system state \(\hbar \) is guaranteed and the settling time of the dynamic system can be estimated as (25).
3.3 Fixed-time Sliding Mode Controller Design
The fixed-time sliding mode controller is now designed for manipulator system (1) in this subsection. Considering the transformed errors \(S_1\), \(S_2\) and the auxiliary dynamic system state \(\hbar \), the nonsingular fixed-time sliding mode surface is formulated as
where \(\Lambda _1\) and \(\Lambda _2\) are designed positive matrix, \(m_2\) and \(n_2\) are odd integers satisfying \(m_2>n_2\). \(\varphi (S_1)=\left[ \varphi _1(S_{11}),\varphi _2(S_{12}),\dots ,\varphi _n(S_{1n})\right] ^T\) is expressed as
where \(s_1=\left[ s_{11},s_{12},\dots ,s_{1n}\right] ^T\) and \(s_1\) is defined as \(s_1=S_2+\Lambda _1Sig^\frac{m_2}{n_2}(S_1)+\Lambda _2Sig^\frac{p_2}{q_2}(S_1)\). \(l_1=\left( 2-\frac{p_2}{q_2}\right) \mu ^{\frac{p_2}{q_2}-1}\), \(l_2=\left( \frac{p_2}{q_2}-1\right) \mu ^{\frac{p_2}{q_2}-2}\) where \(p_2\) and \(q_2\) are odd integers satisfying \(p_2<q_2\) and \(\mu \) is a small positive constant.
Theorem 2
Considering the sliding mode surface (29), if \(s=s_1=0\) is achieved, then the transformed error \(S_1\) is fixed-time stable and the settling time is
Proof
Choosing the Lyapunov function candidate
when \(s=s_1=0\), it indicates that
Based on Theorem 1 we have \(\hbar _i\) is fixed-time stable, thus (33) can be expressed as
Take the time derivative of equation (32), we have
Combine with (23) and (34), (35) can be rewritten as
where \(\alpha _0=\mathrm{min}\left\{ h_1\Lambda _{11},h_2\Lambda _{12},\dots ,h_n\Lambda _{1n}\right\} \) and \(\beta _0=\mathrm{min}\left\{ h_1\Lambda _{21},h_2\Lambda _{22},\dots ,h_n\Lambda _{2n}\right\} \). Based on Lemma 3, we have
Thus, based on Lemma 1 the fixed-time convergence of the transformed error \(S_1\) is guaranteed and the settling time can be estimated as (31).
Now the fixed-time controller is designed based on (29). Derivate (29) along time, we get
Multipulting \(M_0\) and considering (23) (24), (38) can be expressed as
Combine with (15) and use RBF NNs to approximate the system uncertainties f(Z). Thus (39) can be written as
Remark 1
Based on (15) considering unknown function \(f(Z) \in \mathcal {R}^{n}\), the ideal weight matrix \(w^* \in \mathcal {R}^{p_1 \times n}\). Thus, the totally number of the estimate parameters are \(np_1\). Considering \(\Vert w^* \Vert _F\) is an unknown constant and define \(\Vert w^* \Vert _F^2 = k_N\theta ^*\) where \(k_N>0\). Thus we can estimate \(\theta ^*\) instead of the weight matrix \(w^*\), and the estimate number is decreased from \(np_1\) to one, which can reduce the calculation burden.
Assuming that \(\hat{\theta }\), \(\hat{\tau }_d\) are the estimate of \(\theta ^*\) and \(\tau _d^*\) respectively. \(\tilde{\theta }\) and \(\tilde{\tau }_d\) are defined as \(\tilde{\theta }=\theta ^*-\hat{\theta }\) and \(\tilde{\tau }_d=\tau _d^*-\hat{\tau }_d\). Then, the adaptive neural fixed-time controller can be written as
where \(K_1\) and \(K_2\) are controller gain matrix and \(m_3\), \(n_3\), \(p_3\), \(q_3\) are odd integers satisfying \(m_3>n_3\), \(p_3<q_3\). The adaptive laws of \(\hat{\theta }\) and \(\hat{\tau }_d\) are developed as
where \(k_d\), \(r_1\), \(r_2\), \(r_3\) and \(r_4\) are positive numbers.
3.4 Stability Analysis
Theorem 3
For uncertain robotic manipulator dynamic system (1) with the transformed error dynamic system (23) and auxiliary nonlinear dynamic system (24). If the fixed-time sliding mode surface is chosen as (29) and (30), and the controller is designed as (41) with the adaptive laws (42) and (43), then we have the following statements:
-
1.
The fixed-time sliding mode surface s will converge to a small neighborhood of zero in fixed time.
-
2.
The transformed error \(S_1\) is bounded in fixed time which means that the tracking error \(z_1\) will converge to the neighborhood of the equilibrium in fixed time and satisfy the prescribed performance.
-
3.
All signals in the closed-loop system are fixed-time stable subject to input saturation.
Proof
Considering the following Lyapunov Function
Taking time derivative of \(V_3\) we have
Combine with (40), (42) and (43), we get
Considering the following inequalities
thus (46) can be given as
Substituting (41) into (48), we have
Based on Lemmaes 4 and 5, we can get
Thus (49) can be rewritten as
where
Based on Lemma 3, we have
where
From Lemma 2, we have s, \(\tilde{\theta }\) and \(\tilde{\tau }_d\) are fixed-time stable and can converge to a small neighborhood of zero by choosing suitable parameters. The residual set is
and the settling time is

Trajectory tracking performance of \(q_1\)

Trajectory tracking performance of \(q_2\)

Trajectory tracking error of \(q_1\)

Trajectory tracking error of \(q_2\)

Transformed error \(S_{11}\)

Transformed error \(S_{12}\)

Sliding mode surface \(s_1\)

Sliding mode surface \(s_2\)

Control input of \(u_1\)

Control input of \(u_2\)

Auxiliary dynamic system state \(\hbar \)

Norm estimation of RBF NNs weight matrix
Remark 2
It can be seen that s, \(\tilde{\theta }\) and \(\tilde{\tau }_d\) are bounded and converge to a small neighborhood of zero from (54). Considering \(\tilde{\theta }=\theta ^*-\hat{\theta }\), \(\tilde{\tau }_d=\tau _d^*-\hat{\tau }_d\) and the boundedness of \(\theta ^*\) and \(\tau _d^*\), then we have \(\hat{\theta }\) and \(\hat{\tau }_d\) are bounded. When s is converge to a small neighborhood of zero, it implies that \(S_1\), \(S_2\) are bounded. Thus from (20), it is easy to find that \(z_1\) and \(z_2\) are bounded. Therefore, we can conclude that the output q will track the desired trajectory \(q_d\) successfully with input saturation and perscribed constraints, and all signals in the closed-loop system are fixed-time stable.
Remark 3
The main challenge of this paper is to use the sliding mode method to design a fixed-time prescribed performance controller that meets the performance requirements and construct a fixed-time auxiliary dynamic system to deal with input saturation nonlinearity. Unlike most prescribed performance controllers that achieve uniformly ultimately bounded [36,37,38], fixed-time stability is proved by using the Lyapunov method. Compared with [29] and [30], a fixed-time auxiliary dynamic system is designed to deal with input saturation and only one neural parameter needs to be adjusted online, which can reduce the calculation burden.
4 Simulation
Simulation results on a 2-DOF robotic manipulator with input saturation are shown in this section to illustrate the effectiveness of the adaptive neural fixed-time controller proposed in this paper.
The simulation model of the manipulator is chosen from Ge et al [47], details are as follows
where \( p=\left[ 2.9\quad 0.76\quad 0.87\quad 3.04\quad 0.87\right] kgm^2\) and \(g=9.8m/s^2\) . The RBF NNs are constructed by using \(5^4\) nodes with the center evenly laying on \([-1 \quad 1] \times [-1 \quad 1] \times [-1 \quad 1] \times [-1 \quad 1]\) and the width of Gaussian function are selected as \(\eta _1=3\) and \(\eta _2=5\).
Performance function is designed as
and the tracking errors are required to satisfy (16) where \(k_{11}=1\), \(k_{12}=0.8\), \(k_{21}=0.8\) and \(k_{22}=1\). The design parameters are chosen as \(M_0=\mathrm{diag}\left\{ 2 \quad 4\right\} \) \(H_1=H_2=\mathrm{diag}\left\{ 10 \quad 10\right\} \), \(\Lambda _1=\mathrm{diag}\left\{ 5 \quad 3\right\} \), \(\Lambda _2=\mathrm{diag}\left\{ 5 \quad 4\right\} \) and \(K_1=K_2=\mathrm{diag}\left\{ 8 \quad 8\right\} \). \(m_1=21\), \(n_1=17\), \(p_1=11\), \(q_1=17\), \(m_2=23\), \(n_2=17\), \(p_2=17\), \(q_2=23\), \(m_3=37\), \(n_3=29\), \(p_3=31\), \(q_3=33\). \(\mu =0.1\), \(k_N=5\), \(k_d=15\), \(r_1=r_2=3\) and \(r_3=r_4=0.9\). The desired trajectory \(q_{d}=\left[ 0.6+0.5\mathrm{cos}(t),0.3+0.8\mathrm{sin}(t)\right] ^T\) with the initial position and velocity are selected as \(q_1=1.4rad\), \(q_2=0.8rad\), \(\dot{q}_1=\dot{q}_2=0rad/s\) respectively. The input saturation is set as \(u_\mathrm{max}=50Nm\) and \(t \in \left[ 0,20\right] \).
Simulation results are shown from Figs. 1, 2, 3, 4, 5, 6, 7,8, 9, 10, 11 and 12. Figs. 1 and 2 show the manipulator joint trajectory tracking performance. From these two figures, we can see that the joint angular can track the desired trajectory successfully. The tracking error of the two joints will converge to a small region of zero in fixed time and satisfy the prescribed performance requirements, which can be seen in Figs. 3 and 4. The transformed errors \(S_{11}\) and \(S_{12}\) are shown in Figs. 5 and 6 which are converged to the neighborhood of zero. The convergence of sliding mode surfaces \(s_1\) and \(s_2\) can be seen in Figs. 7 and 8. Control inputs are presented in Figs. 9 and 10. We can see that the actual control input \(u_1\) and \(u_2\) are within the limit of input saturation while the designed control input \(v_1\) and \(v_2\) exceed the limit amplitude. Therefore, it indicates that by introducing the fixed-time auxiliary dynamic system, the influence of input saturation nonlinearity is handled successfully. The auxiliary dynamic system state \(\hbar \) is shown in Figs. 11 and 12 shows the estimated value of \(\hat{\theta }\).
From Figs. 1, 2, 3, 4, 5, 6, 7,8, 9, 10, 11 and 12 it is easy to see that the adaptive fixed-time neural sliding mode controller proposed in this paper can make the manipulator track the desired trajectory successfully when considering system uncertainty, input saturation and prescribed constraints. Thus the simulation results verify the effectiveness of our proposed fixed-time trajectory tracking controller.
5 Conclusions
In this paper, the sliding mode based fixed-time adaptive neural trajectory tracking controller for uncertain robotic manipulators under input saturation, external disturbances and prescribed constraints is constructed. The prescribed performance method is utilized to deal with the prescribed constraints of trajectory tracking error. The effect of input saturation is tackled successfully by employing a novel fixed-time auxiliary nonlinear dynamic system and the fixed-time sliding mode surface is introduced for controller design. RBF NNs are constructed to approximate the system uncertainty. Different from most neural controllers that adjust all weight parameters, in this paper, only one parameter is needed to be updated online by estimating the norm of the weight matrix. Furthermore, by using the Lyapunov synthesis, all signals in the closed-loop system are illustrated to be fixed-time stable. Finally, simulation works show the feasibility and effectiveness of the fixed-time neural tracking controller proposed in this article.
For future studies, how to achieve fixed-time stability when only position measurement is available is one research direction. Meanwhile, the convergence time of the fixed-time stability depends on the control parameters and how to ensure the stability of the system within a given time constant is another research direction in the future.
References
Hu YZ, Wang WX, Liu H, Liu LQ (2020) Reinforcement learning tracking control for robotic manipulator with kernel-based dynamic model. IEEE Trans Neural Netw Learn Syst 31(9):3570–3578
Ouyang YC, Dong L, Sun CY (2020) Critic learning-based control for robotic manipulators with prescribed constraints. IEEE T Cybern. https://doi.org/10.1109/TCYB.2020.3003550
Khan AH, Li S, Luo X (2020) Obstacle avoidance and tracking control of redundant robotic manipulator: an RNN-based metaheuristic approach. IEEE Trans Ind Inform 16(7):4670–4680
Panomruttanarug B (2020) Position control of robotic manipulator using repetitive control basedon inverse frequency response design. Int J Control Autom Syst 18(11):2830–2841
Rocco P (1996) Stability of PID control for industrial robot arms. IEEE Trans Robot Autom 12(4):606–614
Kreutz K (1989) On manipulator control by exact linearization. IEEE Trans Autom Control 34(7):763–767
Nikdel N, Nikdel P, Badamchizadeh MA, Hassanzadeh I (2014) Using neural network model predictive control for controlling shape memory alloy-based manipulator. IEEE Trans Ind Electron 61(3):1394–1401
Utkin VI (1977) Variable structure systems with sliding modes. IEEE Trans Autom Control 22(2):212–222
Jing CH, Xu HG, Niu XJ (2019) Adaptive sliding mode disturbance rejection control with prescribed performance for robotic manipulators. ISA Trans 91:41–51
Yi SC, Zhai JY (2019) Adaptive second-order fast nonsingular terminal sliding mode control for robotic manipulators. ISA Trans 90:41–51
Oliveira J, Oliveira PM, Boaventura-Cunha J, Pinho T (2017) Chaos-based grey wolf optimizer for higher order sliding mode position control of a robotic manipulator. Nonlinear Dyn 90(2):1353–1362
Sun YX, Zheng CH, Mercorelli P (2020) Robust approximate fixed-time tracking control for uncertain robot manipulators. Mech Syst Signal Proc 135:106379
Zadeh SMH, Khorashadizadeh S, Fateh MM, Hadadzarif M (2016) Optimal sliding mode control of a robot manipulator under uncertainty using PSO. Nonlinear Dyn 84(4):2227–2239
Huang HH, Yang CG, Chen CLP (2020) Optimal robot-environment interaction under broad fuzzy neural adaptive control. IEEE T Cybern. https://doi.org/10.1109/TCYB.2020.2998984
Zhao D, Li S, Zhu Q, Gao F (2010) Robust finite-time control approach for robotic manipulators. IET Contr Theory Appl 4(1):1–15
Man ZH, Paplinski AP, Wu HR (1994) A robust MIMO terminal sliding mode control scheme for rigid robotic manipulators. IEEE Trans Autom Control 39(12):2464–2469
Feng Y, Yu XH, Man ZH (2002) Non-singular terminal sliding mode control of rigid manipulators. Automatica 38(12):2159–2167
Li J, Du HB, Chen YY, Wen GH, Chen XP, Jiang CH (2019) Position tracking control for permanent magnet linear motor via fast nonsingular terminal sliding mode control. Nonlinear Dyn 97(4):2595–2605
Van M, Mavrovouniotis M, Ge SZS (2019) An adaptive backstepping nonsingular fast terminal sliding mode control for robust fault tolerant control of robot manipulators. IEEE Trans Syst Man Cybern - Syst 49(7):1448–1458
Wang LA, Du HB, Zhao WJ, Wu D, Zhu WW (2020) Implementation of integral fixed-time sliding mode controller for speed regulation of PMSM servo system. Nonlinear Dyn 102(1):185–196
Zhang Y, Hua CC, Li K (2019) Disturbance observer-based fixed-time prescribed performance tracking control for robotic manipulator. Int J Syst Sci 50(13):2437–2448
Zhang JQ, Yu SH, Yan Y (2020) Fixed-time velocity-free sliding mode tracking control for marine surface vessels with uncertainties and unknown actuator faults. Ocean Eng 201:107107
Yuan WX, Sun W, Liu ZG, Zhang FX (2019) Adaptive fuzzy tracking control of stochastic mechanical system with input saturation. Int J Fuzzy Syst 21(8):2600–2608
Chen ZT, Li ZJ, Chen CLP (2017) Disturbance observer-based fuzzy control of uncertain MIMO mechanical systems with input nonlinearities and its application to robotic exoskeleton. IEEE T Cybern 47(4):984–994
Chen TR, Hill DJ, Wang C (2020) Distributed fast fault diagnosis for multimachine power systems via deterministic learning. IEEE Trans Ind Electron 67(5):4152–4162
Hua CC, Chang YF (2014) Decentralized adaptive neural network control for mechanical systems with dead-zone input. Nonlinear Dyn 76(3):1845–1855
Wu YX, Huang R, Li X, Liu S (2019) Adaptive neural network control of uncertain robotic manipulators with external disturbance and time-varying output constraints. Neurocomputing 323:108–116
He W, Huang B, Dong YT, Li ZJ, Su CY (2018) Adaptive neural network control for robotic manipulators with unknown deadzone. IEEE T Cybern 48(9):2670–2682
Wu YX, Wang Y (2020) Asymptotic tracking control of uncertain nonholonomic wheeled mobile robot with actuator saturation and external disturbances. Neural Comput Appl 32(12):8735–8745
Li HY, Bai L, Zhou Q, Lu RQ, Wang LJ (2017) Adaptive fuzzy control of stochastic nonstrict-feedback nonlinear systems with input saturation. IEEE Trans Syst Man Cybern - Syst 47(8):2185–2197
Si WJ, Dong XD (2019) Adaptive neural control for MIMO stochastic nonlinear pure-feedback systems with input saturation and full-state constraints. Neurocomputing 275:298–307
Liu ZJ, Liu JK, He W (2017) Partial differential equation boundary control of a flexible manipulator with input saturation. Int J Syst Sci 48(1):53–62
Bechlioulis CP, Rovithakis GA (2008) Robust adaptive control of feedback linearizable MIMO nonlinear systems with prescribed performance. IEEE Trans Autom Control 53(9):2090–2099
Xu G, Xia YQ, Zhai DH, Ma DL (2020) Adaptive prescribed performance terminal sliding mode attitude control for quadrotor under input saturation. IET Contr Theory Appl 14(17):2473–2480
Xu XC, Liu QS, Zhang CL, Zeng ZG (2020) Prescribed performance controller design for DC converter system with constant power loads in DC microgrid. IEEE Trans Syst Man Cybern - Syst 50(11):4339–4348
Zhou ZP, Zhu FL, Xu DZ, Gao ZF (2020) An interval-estimation-based anti-disturbance sliding mode control strategy for rigid satellite with prescribed performance. ISA Trans 105:63–76
Zhu YK, Qiao JZ, Guo L (2019) Adaptive sliding mode disturbance observer-based composite control with prescribed performance of space manipulators for target capturing. IEEE Trans Ind Electron 66(3):1973–1983
Wang M, Yang AL (2017) Dynamic learning from adaptive neural control of robot manipulators with prescribed performance. IEEE Trans Syst Man Cybern - Syst 47(8):2244–2255
He SD, Wang M, Dai SL, Luo F (2019) Leader-follower formation control of USVs with prescribed performance and collision avoidance IEEE Trans Ind. Inform 15(1):572–581
Liu YJ, Zeng Q, Tong SC, Chen CLP, Liu L (2020) Actuator failure compensation-based adaptive control of active suspension systems with prescribed performance. IEEE Trans Ind Electron 67(8):7044–7053
Hu C, Wang ZF, Qin YC, Huang YJ, Wang JX, Wang RR (2020) Lane keeping control of autonomous vehicles with prescribed performance considering the rollover prevention and input saturation. IEEE Trans Intell Transp Syst 21(7):3091–3103
Polyakov A (2012) Nonlinear feedback design for fixed-time stabilization of linear control systems. IEEE Trans Autom Control 57(8):2106–2110
Zou ZY (2015) Nonsingular fixed-time consensus tracking for second-order multi-agent networks. Automatica 54:305–309
Ba DS, Li YX, Tong SC (2019) Fixed-time adaptive neural tracking control for a class of uncertain nonstrict nonlinear systems. Neurocomputing 363:273–280
Yang HJ, Ye D (2018) Adaptive fixed-time bipartite tracking consensus control for unknown nonlinear multi-agent systems: An information classification mechanism. Inf Sci 459:238–254
Park J, Sandberg IW (1991) Universal approximation using radial-basis-function networks. Neural Comput 3(2):246–257
Ge SS, Lee TH, Harris CJ (1998) Adaptive neural network control of robotic manipulators. World Scientific, Singapore
Acknowledgements
This work was supported by Science and Technology Planning Project of Guangdong Province (2015B010133002 and 2017B090910011).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
All authors declare that they have no conflicts of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Wu, Y., Fang, H., Xu, T. et al. Adaptive Neural Fixed-time Sliding Mode Control of Uncertain Robotic Manipulators with Input Saturation and Prescribed Constraints. Neural Process Lett 54, 3829–3849 (2022). https://doi.org/10.1007/s11063-022-10788-8
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11063-022-10788-8