
Abstract
This article is concerned with the fixed time synchronization for a class of Quaternion valued neural networks (QVNNs) with mixed time varying delays. Firstly, the QVNNs are separated into four equivalent real valued neural networks (RVNNs). Then, a novel suitable controller is designed to establish the fixed time synchronization of the QVNNs with the help of Lyapunov function. To give a glimpse, the finite time and fixed time stability definitions are proposed. Two different expressions of settling time are obtained by using two different lemmas. Finally, the validation of the theoretical results is shown through numerical simulation to a specific example.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Over the past few decades, neural network is a hot topic of research. It has attracted many scholars due to its wide range of practical applications in various fields including associative memory, signal processing, pattern recognition, artificial intelligence, combinational optimization, and so on [1,2,3,4,5,6,7,8]. In the beginning, most of the works in neural networks were mainly in real valued neural networks (RVNNs) and complex valued neural networks (CVNNs) [6, 9,10,11,12,13]. Continuous development of real and complex valued neural networks are certain, due to their limitations to deal with the problems of multi dimensional data. For instance, when issue on detection of symmetry is encountered, RVNNs may not be useful, whereas CVNNs can solve such problems [3]. CVNNs have also limitations when dealing with three and four dimensional data. Therefore, we have to use high dimensional numbers. Quaternion number being an extension of complex number, is a special case of clifford algebra introduced by British Mathematician William Rowan Hamilton in the year 1843. As compared to real numbers and complex numbers, commutativity of multiplication does not hold in quaternions, due to this the quaternions did not receive much attention of the researchers earlier. But recently, researchers have started working in this direction due to its wide range of potential applications in various fields like computer graphics, array processing, three/four dimensional data modelling, color image processing, attitude control, predication of 3-D wind processing [14,15,16,17].
Quaternion valued neural network (QVNN) is an extension of CVNN. In QVNNs, the states, activation functions and the connection weights take values in quaternions with unique superiority to deal with multi dimensional data. For the image compression [18], three neurons are needed for the transmission of one colour signal, whereas for QVNN one quaternion neuron can transmit one colour through three channels. Therefore, QVNNs store large amount of data in lesser number of neurons. More precisely, QVNNs perform better to deal with the problems of optimization and estimation as compared to RVNNs and CVNNs [19,20,21].
As an important kind of dynamical behaviour, synchronization of neural networks has been an interesting topic of research in recent years. This is widely applied in various aspects viz., secure communication [22], image encryption [23], medicine [24], synchronization of local brain region in patient with Parkinson’s disease [25]. However, most of the works are limited to attain synchronization in infinite time, including projective synchronization [26], adaptive synchronization [27, 28], exponential synchronization [29] and asymptotical synchronization [30]. These types of synchronization rarely satisfy the synchronization condition unless the time is infinite. Therefore, the method in which the synchronization within finite time is of great interest rather than synchronization in infinite time [31,32,33,34,35,36]. However, the drawback of finite-time synchronization is that it depends wholly on initial conditions. More precisely, larger the initial synchronization error, bigger will be the settling time. But in actual applications of the neural networks, it is not always possible to find the initial conditions of the system explicitly. To overcome this drawback, A. Polyakov proposed the fixed-time synchronization [37]. Here, synchronization is achieved in a fixed time irrespective of any initial conditions i.e., the uniform upper bound of finite time stability is independent of initial values. Some important applications of fixed time synchronization are found in power system [38] and rigid spacecraft [39]. Thus it is fruitful to focus on fixed time stability/ synchronization of non linear systems. Recent works on the fixed time synchronization can be found in the articles [38,39,40,41,42,43]. These works are mainly on the RVNNs and CVNNs. Till date a few results are available on the fixed-time synchronization of QVNNs [44,45,46,47,48,49]. In most of these works, the neural network models have been considered without time delay or discrete delay or time varying delay [45, 46, 49]. In this article, we have purposed mixed time varying delay neural networks model which is more general. As far as, the synchronization of QVNNs with both time varying and distributed delay is still an open and challenging problem.
Since time delays are generally time varying in nature, therefore it is inescapable in dynamical system due to limited transmission velocity between the neurons. In presence of time delay dynamical behaviours of QVNNs become more complex and more general. Time delay may lead to performance degradation, for example, oscillation, instability, bifurcation etc. On the other hand due to existence of vast parallel pathways with different axon sizes and lengths, it is more rational way to introduce continuously distributed delay into neural networks model [50, 51]. Few important practical applications for the system with distributive delay can be found in the research articles [52, 53].
Taking into account of all the above discussions, this article aims to study the fixed time synchronization between the identical drive-response systems of QVNN (1) with mixed time varying delays. This is obtained by using the criterion of fixed time stability of error system. For the fixed time stabilty, the synchronization of drive-response systems is established within fixed time. Some major contributions of this scientific contribution are listed as follows.
-
(1)
It is the first time the fixed time synchronization of QVNNs is discussed with mixed time varying delays.
-
(2)
The controllers are deigned in such a way that the settling time is independent of the delay terms.
-
(3)
Converting the QVNN into four real parts and by using some suitable controllers along with Lyapunov function, the synchronization within fixed time is achieved.
The rest of the article is organized as follows: Section 2 contains model description and prerequisite, section 3 contains main theoretical results, section 4 includes a numerical example for validation of theoretical results, which is followed by the section 5 as conclusion.
Notations: \(\mathbb {R},\mathbb {C},\mathbb {Q} \) are real field, complex field and quaternion skew field, respectively. \(\mathbb {R}^{n\times m},\mathbb {C}^{n\times m}\) and \(\mathbb {Q}^{n\times m}\) denote the \( n\times m \) matrices where entries are from the \(\mathbb {R},\mathbb {C} \text { and } \mathbb {Q}\), respectively.
2 Model Description and Preliminaries
The quaternion numbers form a class of hypercomplex numbers composed of one real and three imaginary parts. A quaternion number is 4-D vector space over \( \mathbb {R} \). Let \(q\in \mathbb {Q} \), then it can be written as
where \( q^R,q^I,q^J,q^K\in \mathbb {R} \). The unit components of quaternion numbers obey the Hamilton rules i.e., the units \( i,j \text { and } k \) satisfy the following:
\( ij=-ji=k, jk=-kj=i, ki=-ik=j, ~~i^2=j^2=k^2=ijk=-1\).
This shows that multiplication in quaternions is non commutative. Conjugate of the quaternion number is \( q^* \text { or } \bar{q} =q^R-q^Ii-q^Jj-q^Kk,\) and the modulus value |q| is defined as \( |q|=\sqrt{q.q^{*}} =\sqrt{(q^R)^2+(q^I)^2+(q^J)^2+(q^K)^2}.\)
If \( q_1,q_2\in \mathbb {Q}\), where \(q_1=q_1^{R}+q_1^{I}i+q_1^{J}j+q_1^{K}k\in \mathbb {Q}\) and \(q_2=q_2^{R}+q_2^{I}i+q_2^{J}j+q_2^{K}k\in \mathbb {Q}\). The addition \(q_1+q_2\) and multiplication \( q_1.q_2 \) are defined as
The model of QVNN with mixed time varying delay is considered as

where \(p=1,2,\ldots ,n\); \(z(t) = [z_{1}(t), z_{2}(t),\ldots ,z_{n}(t)]^{T} \in \mathbb {Q}^{n}\) is the state vector of the neural networks with n neurons at time \(t; C=\text {diag}\{c_1,c_2,\ldots ,c_n\}\in \mathbb {R}^{n\times n}\) is the self-feedback connection weights matrix with \(c_i>0\) for \(i=1,2,\ldots ,n\);  and \(D=(d_{ij})_{n\times n}\in \mathbb {Q}^{n\times n}\) for \(i=1,2,\ldots ,n\), \(j=1,2,\ldots ,n\), are the connection weight matrices; \(f_i(.), g_i(.)\) and \(h_i(.)\) are the activation functions for \(i=1,2,\ldots ,n\) of suitable dimensions; \(I_i(t)\) for \(i=1,2,\ldots ,n\), denote the external inputs. \(\tau _{1}(t)\) and \(\tau _{2}(t)\) are the time varying delays.
and \(D=(d_{ij})_{n\times n}\in \mathbb {Q}^{n\times n}\) for \(i=1,2,\ldots ,n\), \(j=1,2,\ldots ,n\), are the connection weight matrices; \(f_i(.), g_i(.)\) and \(h_i(.)\) are the activation functions for \(i=1,2,\ldots ,n\) of suitable dimensions; \(I_i(t)\) for \(i=1,2,\ldots ,n\), denote the external inputs. \(\tau _{1}(t)\) and \(\tau _{2}(t)\) are the time varying delays.
The following assumptions will be used frequently.
Assumption 1
Each of the activation functions can be written as
where \(F_p=f_p,g_p,h_p\) for \(p=1,2,\ldots ,n\); \(z_p^\gamma \in \mathbb {R}\) for \(\gamma =R,I,J,K\); \(p=1,2,\ldots ,n.\)
Assumption 2
Each of the four components of every activation function satisfies the Lipschitz condition i.e., for \(x_1,x_2 \in \mathbb {R}\), \(\exists \) constants \(l^1_p,l^2_p,l^3_p\in \mathbb {R}\), such that
Remark 1
The activation functions are absolutely inherent components of the neural networks which influence the dynamical behaviour of the designed neural networks. From both the assumptions, the existence and uniqueness of the solution of model (1) can be guaranteed due to continuity and Lipschitz condition of the activation functions [54].
The system (1) with the Assumption 1 can be written in four real valued systems as

The corresponding slave system is given by

Let us define the error term as \(\varepsilon _p(t)=s_p(t)-z_p(t).\)
Then from Eqs. (3) and (4), we get


Let the controllers be defined as
where \(\xi _{4p}>0\), \(\xi _{5p}>0\), \(0< \alpha <1\), \(\beta >1\). \(\xi _{1p}\), \(\xi _{2p}^\gamma \) and \(\xi _{3p}^\gamma \) are the parameters those are to be defined later.
Remark 2
The controller in the present article is designed in such a way that it contains the linear and non linear terms. Non linear term plays significant role in the rate of synchronization. Also the settling time obtained is independent of the delays.
Some definitions and lemmas used in this article are described below.
Definition 1
([37]) The origin of the system (5) is said to achieve finite time stability, if there exists a function \(T:\mathbb {R}^{n}\rightarrow \mathbb {R}_{+} \cup \{0\}\) called settling time function such that \(\lim _{t\rightarrow T(\varepsilon _0)}\Vert \epsilon (t)\Vert =0 \) and \(\epsilon (t)=0\) for all \(t\ge T(\varepsilon _0)\). Here, \(\varepsilon _0\) is the initial value of the system (5).
Definition 2
([37]) The origin of the system (5) is called fixed time stable if it is finite time stable and the settling time function is bounded i.e., there exists a positive constant \(\mathcal {C}\) such that \(T(\varepsilon _{0})<\mathcal {C}\) for all \(\varepsilon _{0} \in \mathbb {Q}^{n}\).
Remark 3
From the definitions of finite-time and fixed-time stabilities, it can be seen that in finite time stability, the settling time depends on initial conditions i.e., for every change in initial conditions we will have different settling time expressions. Whereas in fixed time stability, the settling time is invariant of initial conditions i.e., the settling time expression is independent of initial conditions.
Lemma 1
[55] Let \(V(.):\mathbb {R}^{n}\rightarrow \mathbb {R}_{+} \cup \{0\}\) is a continuous and radially unbounded function. If e(t) is any solution of expression (5), then the origin of the system (5) is fixed time stable provided
-
(i)
\(V(e(t))=0 \) iff \(e(t)=0\);
-
(ii)
for some \(k_1,k_2,k_3>0,\)
$$\begin{aligned} \dot{V}(t)\le -k_1V^{\alpha }(e(t))-k_2V^{\beta }(e(t))-k_3V(e(t)), 0<\alpha < 1 \text { and } \beta >1. \end{aligned}$$
The settling time expression is given by \(T_{set}^1 = \frac{1}{k_3(1-\alpha )}ln(1+\frac{k_3}{k_1})+\frac{1}{k_3(\beta -1)}ln(1+\frac{k_3}{k_2})\).
Lemma 2
[37] If \(V(.):\mathbb {R}^{n}\rightarrow \mathbb {R}_{+}\) is a continuous and radially unbounded function and e(t) is any solution of (5), then the origin of the system (5) is fixed time stable provided
-
(i)
\(V(e(t))=0 \) iff \(e(t)=0\);
-
(ii)
for some \(k_1,k_2>0,\)
$$\begin{aligned} \dot{V}(t)\le -k_1V^{\alpha }(e(t))-k_2V^{\beta }(e(t)), 0<\alpha < 1 \text { and } \beta >1. \end{aligned}$$
The settling time expression is given by \(T_{set}^2 = \frac{1}{k_1(1-\alpha )}+\frac{1}{k_2(\beta -1)}\).
Lemma 3
[49] let \(z_{i}\ge 0\) for \(i=1,2,\ldots ,n\); \(0<p\le 1\) and \(q >1\). Then the following inequality holds.
3 Main Results
Theorem 1
The system (5) with the Assumption 2 and the controllers (6) gains fixed time stability if it satisfies the following conditions:

Here, the expression of settling time expression is \(T_{set}^1=\frac{1}{c(1-\alpha )}\ln \left( 1+\frac{c}{\min _{p}(\xi _{4p})}\right) +\frac{1}{c(\beta -1)}\ln \left( 1+\frac{c}{\min _{p}(\xi _{5p})(4n)^{1-\beta }}\right) \),
where  .
.
Proof
Consider the Lyapunov functional as
where \(V_1(t)=\sum _{i=1}^n|\varepsilon _p^R(t)|\), \(V_2(t)=\sum _{i=1}^n|\varepsilon _p^I(t)|\), \(V_3(t)=\sum _{i=1}^n|\varepsilon _p^J(t)|\), \(V_4(t)=\sum _{i=1}^n|\varepsilon _p^K(t)|\).
Then the dinni derivative of \(V_1(t)\) along the trajectories of the considered system is given by

Similarly,

Merging these four inequalities, we have

By using Lemma 1 and Lemma 3, we obtain

Corollary 1
The system (5) with the Assumption 2 and the controllers (6) achieves fixed time stability with the same sufficient conditions as in Theorem 1. The settling time obtained in this case is given by
Proof
Define the Lyapunov functional as
Calculating the derivative of V(t) along the trajectories of given system as calculated in Theorem 1 in equation (8), and using Lemma 1 and Lemma 3, we obtain
and the corresponding settling time is given by expression (9).
Remark 4
Our considered model is more general and more complex as compared to the existing models to achieve the fixed time synchronization of QVNNs. If we take the connection weights matrix \(D=0\) in the model (1), then we will get the model used in [46] which is without distributed delay. Again by taking the connection weight matrices \(B=0\) and \(D=0\) in (1), we get the model of [49] which is without delay term. But in actual implementation of neural networks, the delay is an inescapable quantity.
4 Numerical Example
In this section a drive is made to validate the efficiency and effectiveness of the proposed method while applying it during synchronization of two identical QVNNs with mixed time delays.
Example 1
Consider QVNN as given in (1) for \(n=2\) as


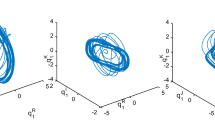
Plots of the trajectories of \(e_1^R(t)\), \(e_1^I(t)\), \(e_1^J(t)\), \(e_1^K(t)\) and \(e_2^R(t)\), \(e_2^I(t)\), \(e_2^J(t)\), \(e_2^K(t)\) for the solution e(t) of the error system (5)
where \(z=z^{R}+z^{I}i+z^{J}j+z^{K}k,\)
and let us take the activation functions as
for \(j=1,2\) and \(\gamma =R,I,J,K.\)
Let us consider the initial conditions as
\(z_{1}(0)=80+70\bar{i}+60\bar{j}+50\bar{k}\), \(z_{2}(0)=40+30\bar{i}+20\bar{j}+10\bar{k}\), \(s_{1}(0)= 10+20\bar{i}+30\bar{j}+40\bar{k}, s_{2}(0)=50+60\bar{i}+70\bar{j}+80\bar{k}\).
For this case, the trajectories of the system without controllers are shown through Fig. 1 which clearly show its non-synchronization. Again, the Assumption (2) with the above considered activation functions hold for \(l^1_{p}=1 = l^2_{p} = l^3_{p}\). Now, considering \(\xi _{11}=12, \xi _{12}=14, \alpha =0.5, \beta =1.5, \xi _{21}=20, \xi _{22}=20,\xi _{31}=20,\xi _{32}=20,\xi _{4p}=10,\xi _{5p}=20 \) for \(p=1,2\), the controller functions become
The synchronization of the trajectories of the systems with control functions are depicted through Fig. 2. The settling times are calculated as \(T_{set}^1=0.4464\) and \(T_{set}^2=0.6656\). Therefore, the settling time obtained by Lemma 1 gives more accurate result as compared to that given by Lemma 2.
Remark 5
The settling time using Lemma 1 is less as compared to that using Lemma 2. A general comparison of the two settling time expressions is given in [46]. Lemma 2 is used to prove synchronization results in [49, 58] which gives more conservative results.
Remark 6
QVNNs store large amount of data in lesser number of neurons as compared to the CVNNs and RVNNs. In [56], the proposed neural network needs 144 neurons to store 12 \(\times \) 12 pixel colour figure, however the corresponding CVNNs should have 432 neurons to store the same. Also, in [57], this has been shown that the storage capacity of the CVNNs is larger than that of the RVNNs.
5 Conclusion
This article has investigated the fixed time synchronization of QVNNs with mixed time varying delays. To achieve the desired synchronization, a set of sufficient conditions is derived through designing a new controller and a proper choice of Lyapunov function. Two different lemmas have been used for getting two different settling time expressions. The theoretical results are validated through a given numerical example. To overcome the non-commutativity of quaternions, QVNNs have been decomposed into four equivalent RVNNs, which have supported to open a good scope of doing research in QVNNs as in RVNNs. In QVNNs the pre-defined time stability and the effect of time varying impulses on finite or fixed time stability may be a good area of research in near future.
References
Shen D, Xu Y (2016) Iterative learning control for discrete-time stochastic systems with quantized information. IEEE/CAA J Autom Sin 3(1):59–67
Zhao D, Wang Z, Chen Y, Wei G (2020) Proportional-integral observer design for multidelayed sensor-saturated recurrent neural networks: a dynamic event-triggered protocol. IEEE Trans Cybern 50(11):4619–4632
Liu Y, Zheng Y, Lu J, Cao J, Rutkowski L (2019) Constrained quaternion-variable convex optimization: a quaternion-valued recurrent neural network approach. IEEE Trans Neural Netw Learn Syst 31(3):1022–1035
Miao J, Kou KI (2020) Quaternion-based bilinear factor matrix norm minimization for color image inpainting. IEEE Trans Signal Process 68:5617–5631
Xia Z, Liu Y, Lu J, Cao J, Rutkowski L (2020) Penalty method for constrained distributed quaternion-variable optimization. IEEE Trans Cybern
Zhao Z, Wang Z, Zou L, Guo G (2018) Finite-time state estimation for delayed neural networks with redundant delayed channels. IEEE Trans Syst Man Cybern Syst
Ding D, Wang Z, Han QL (2019) Neural-network-based output-feedback control with stochastic communication protocols. Automatica 106:221–229
Jin J (2021) An improved finite time convergence recurrent neural network with application to time-varying linear complex matrix equation solution. Neural Process Lett 53(1):777–786
Wang Z, Liu X (2019) Exponential stability of impulsive complex-valued neural networks with time delay. Math Comput Simul 156:143–157
Rakkiyappan R, Sivaranjani R, Velmurugan G, Cao J (2016) Analysis of global O (t- \(\alpha \)) stability and global asymptotical periodicity for a class of fractional-order complex-valued neural networks with time varying delays. Neural Netw 77:51–69
Wang JL, Wu HN, Huang T, Ren SY (2014) Passivity and synchronization of linearly coupled reaction–diffusion neural networks with adaptive coupling. IEEE Trans Cybern 45(9):1942–1952
Wen S, Zeng Z, Huang T, Zhang Y (2013) Exponential adaptive lag synchronization of memristive neural networks via fuzzy method and applications in pseudorandom number generators. IEEE Trans Fuzzy Syst 22(6):1704–1713
Zeng D, Zhang R, Park JH, Zhong S, Cheng J, Wu GC (2021) Reliable stability and stabilizability for complex-valued memristive neural networks with actuator failures and aperiodic event-triggered sampled-data control. Nonlinear Anal Hybrid Syst 39:100977
Took CC, Mandic DP (2008) The quaternion LMS algorithm for adaptive filtering of hypercomplex processes. IEEE Trans Signal Process 57(4):1316–1327
Miron S, Le Bihan N, Mars JI (2006) Quaternion-MUSIC for vector-sensor array processing. IEEE Trans Signal Process 54(4):1218–1229
Xia Y, Jahanchahi C, Mandic DP (2014) Quaternion-valued echo state networks. IEEE Trans Neural Netw Learn Syst 26(4):663–673
Zou C, Kou KI, Wang Y (2016) Quaternion collaborative and sparse representation with application to color face recognition. IEEE Trans Image Process 25(7):3287–3302
Isokawa T, Kusakabe T, Matsui N, Peper F (2003) Quaternion neural network and its application. In: International conference on knowledge-based and intelligent information and engineering systems, pp 318–324
Qin S, Feng J, Song J, Wen X, Xu C (2016) A one-layer recurrent neural network for constrained complex-variable convex optimization. IEEE Trans Neural Netw Learn Syst 29(3):534–544
Sahoo A, Xu H, Jagannathan S (2015) Neural network-based event-triggered state feedback control of nonlinear continuous-time systems. IEEE Trans Neural Netw Learn Syst 27(3):497–509
Jiang BX, Liu Y, Kou KI, Wang Z (2020) Controllability and observability of linear quaternion-valued systems. Acta Math Sin Engl Ser 36(11):1299–1314
Duan L, Fang X, Fu Y (2019) Global exponential synchronization of delayed fuzzy cellular neural networks with discontinuous activations. Int J Mach Learn Cybern 10(3):579–589
Yau HT, Hung TH, Hsieh CC (2012) Bluetooth based chaos synchronization using particle swarm optimization and its applications to image encryption. Sensors 12(6):7468–7484
Diab A, Marque C, Karlsson B, Hassan M (2013) Comparison of methods for evaluating signal synchronization and direction: application to uterine EMG signals. In: 2013 2nd international conference on advances in biomedical engineering, pp 14–17
Cagnan H, Duff EP, Brown P (2015) The relative phases of basal ganglia activities dynamically shape effective connectivity in Parkinson’s disease. Brain 138(6):1667–1678
Zhang H, Wang XY (2017) Complex projective synchronization of complex-valued neural network with structure identification. J Franklin Inst 354(12):5011–5025
Sun Y, Liu Y (2021) Adaptive synchronization control and parameters identification for chaotic fractional neural networks with time-varying delays. Neural Process Lett 1–17
Li J, He C, Zhang W, Chen M (2017) Adaptive synchronization of delayed reaction–diffusion neural networks with unknown non-identical time-varying coupling strengths. Neurocomputing 219:144–153
Kumar R, Kumar U, Das S, Qiu J, Lu J (2021) Effects of heterogeneous impulses on synchronization of complex-valued neural networks with mixed time-varying delays. Inf Sci 551:228–244
Li Y, Yang Z, Dong Z (2017) Asymptotical synchronization of memristor-based neural networks with time-varying delays via adaptive control. In: 2017 36th Chinese control conference (CCC), pp 4012–4017
Mishra AK, Das S, Yadav VK (2021) Finite-time synchronization of multi-scroll chaotic systems with sigmoid non-linearity and uncertain terms. Chin J Phys
Chen C, Li L, Peng H, Yang Y, Li T (2017) Finite-time synchronization of memristor-based neural networks with mixed delays. Neurocomputing 235:83–89
Cai Z, Huang L, Zhu M, Wang D (2016) Finite-time stabilization control of memristor-based neural networks. Nonlinear Anal Hybrid Syst 20:37–54
Liu M, Jiang H, Hu C (2016) Finite-time synchronization of memristor-based Cohen–Grossberg neural networks with time-varying delays. Neurocomputing 194:1–9
Velmurugan G, Rakkiyappan R, Cao J (2016) Finite-time synchronization of fractional-order memristor-based neural networks with time delays. Neural Netw 73:36–46
Wu H, Wang X, Liu X, Cao J (2020) Finite/fixed-time bipartite synchronization of coupled delayed neural networks under a unified discontinuous controller. Neural Process Lett 52(2):1359–1376
Polyakov A (2011) Nonlinear feedback design for fixed-time stabilization of linear control systems. IEEE Trans Autom Control 57(8):2106–2110
Hu C, Yu J, Chen Z, Jiang H, Huang T (2017) Fixed-time stability of dynamical systems and fixed-time synchronization of coupled discontinuous neural networks. Neural Netw 89:74–83
Ni J, Liu L, Liu C, Hu X, Li S (2016) Fast fixed-time nonsingular terminal sliding mode control and its application to chaos suppression in power system. IEEE Trans Circuits Syst II Express Briefs 64(2):151–155
Wan Y, Cao J, Wen G, Yu W (2016) Robust fixed-time synchronization of delayed Cohen–Grossberg neural networks. Neural Netw 73:86–94
Zhang Y, Deng S (2020) Fixed-time synchronization of complex-valued memristor-based neural networks with impulsive effects. Neural Process Lett 52(2):1263–1290
Gao F, Wu Y, Zhang Z, Liu Y (2019) Global fixed-time stabilization for a class of switched nonlinear systems with general powers and its application. Nonlinear Anal Hybrid Syst 31:56–68
Jiang B, Hu Q, Friswell MI (2016) Fixed-time attitude control for rigid spacecraft with actuator saturation and faults. IEEE Trans Control Syst Technol 24(5):1892–1898
Yang X, Li C, Song Q, Chen J, Huang J (2018) Global Mittag–Leffler stability and synchronization analysis of fractional-order quaternion-valued neural networks with linear threshold neurons. Neural Netw 105:88–103
Chen D, Zhang W, Cao J, Huang C (2020) Fixed time synchronization of delayed quaternion-valued memristor-based neural networks. Adv Differ Equ 1:1–16
Kumar U, Das S, Huang C, Cao J (2020) Fixed-time synchronization of quaternion-valued neural networks with time-varying delay. Proc R Soc A 476(2241):20200324
Wei R, Cao J (2019) Fixed-time synchronization of quaternion-valued memristive neural networks with time delays. Neural Netw 113:1–10
Ding D, You Z, Hu Y, Yang Z, Ding L (2020) Finite-time synchronization of delayed fractional-order quaternion-valued memristor-based neural networks. Int J Mod Phys B 2150032
Deng H, Bao H (2019) Fixed-time synchronization of quaternion-valued neural networks. Phys A Stati Mech Appl 527(121351)
Li T, Luo Q, Sun C, Zhang B (2009) Exponential stability of recurrent neural networks with time-varying discrete and distributed delays. Nonlinear Anal Real World Appl 10(4):2581–2589
Lakshmanan M, Senthilkumar DV (2011) Dynamics of nonlinear time-delay systems. Springer, Berlin
Fiagbedzi YA, Pearson AE (1987) A multistage reduction technique for feedback stabilizing distributed time-lag systems. Automatica 23(3):311–326
Hale JK, Lunel SMV (2013) Introduction to functional differential equations. Springer, Berlin, p 99
Cao J, Wang J (2004) Absolute exponential stability of recurrent neural networks with Lipschitz-continuous activation functions and time delays. Neural Netw 17(3):379–390
Chen C, Li L, Peng H, Yang Y, Mi L, Zhao H (2020) A new fixed-time stability theorem and its application to the fixed-time synchronization of neural networks. Neural Netw 123:412–419
Song Q, Chen X (2018) Multistability analysis of quaternion-valued neural networks with time delays. IEEE Trans Neural Netw Learn Syst 29(11):5430–5440
Chen X, Zhao Z, Song Q, Hu J (2017) Multistability of complex-valued neural networks with time-varying delays. Appl Math Comput 294:18–35
Li D, Ge SS, Lee TH (2020) Fixed-time-synchronized consensus control of multiagent systems. IEEE Trans Control Netw Syst 8(1):89–98
Acknowledgements
The third author acknowledges the project Grant provided by the SERB, Government of India under the MATRICS scheme (File No.: MTR/2020/000053). The Deanship of Scientific Research (DSR) at King Abdulaziz University, Jeddah, Saudi Arabia has funded this project, under grant no. (FP-114-43).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Singh, S., Kumar, U., Das, S. et al. Synchronization of Quaternion Valued Neural Networks with Mixed Time Delays Using Lyapunov Function Method. Neural Process Lett 54, 785–801 (2022). https://doi.org/10.1007/s11063-021-10657-w
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11063-021-10657-w