
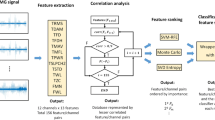
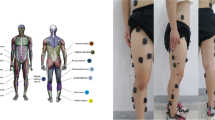
The performance of a binary particle swarm optimization-based feature selection (BPSOFS) for predicting the class of the knee angle (KA) from myoelectric signals in lower limb movements was examined. Surface EMG (sEMG) signals were recorded from the vastus lateralis and biceps femoris muscles while performing a task of standing up from and sitting down on the chair. The knee angle was measured using a goniometer and quantized into five levels/classes. The sEMG signals were segmented using overlapped windowing. Twenty features per muscle were extracted and fed to a support vector machine (SVM) classifier. Grid selection was done to set the parameters of the classifier. In our study, the KA was first divided into five levels/classes, and the KA class was predicted from the features of sEMG signals using the SVM classifier. Subsequently, BPSOFS was implemented, and the classification accuracy was measured using a reduced feature set. The performance of three different initialization techniques, namely small, large, and mixed initializations, were compared. A paired t test was applied to compare the performance of the SVM classifier with BPSOFS and with the SVM classifier using all the features. The results indicated that BPSOFS achieves a classification accuracy of 90.92% utilizing only 30% of the total features (P > 0.05).
Article PDF
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
References
I. Guyon and A. Elisseeff, “An introduction to variable and feature selection,” J. Mach. Learn. Res., 3, 1157–1182 (2003), https://doi.org/10.1162/153244303322753616.
H. Banka and S. Dara, “A Hamming distance based binary particle swarm optimization (HDBPSO) algorithm for high dimensional feature selection, classification and validation,” Pattern Recognit. Lett., 52, 94–100 (2015).
R. Eberhart and J. Kennedy, “A new optimizer using particle swarm theory,” In: MHS’95. Proc. Sixth Int. Symp. Micro Machine Human Sci., IEEE, 39–43 (1995).
R. Boostani and M. H. Moradi, “Evaluation of the forearm EMG signal features for the control of a prosthetic hand,” Physiol. Meas., 24, No. 2, 309–319 (2003), https://doi.org/10.1088/0967-3334/24/2/307.
L. Hargrove, K. Englehart, and B. Hudgins, “A training strategy to reduce classification degradation due to electrode displacements in pattern recognition based myoelectric control,” Biomed. Signal Process. Control, 3, No. 2, 175–180 (2008).
H.-P. Huang, Y.-H. Liu, L.-W. Liu, and C.-S. Wong, “EMG classification for prehensile postures using cascaded architecture of neural networks with self-organizing maps,” Proc. IEEE Int. Robot. Autom., 1, 1497–1502 (2003), https://doi.org/10.1109/ROBOT.2003.1241803.
M. Zardoshti-Kermani, B. C. Wheeler, K. Badie, and R. M. Hashemi, “EMG feature evaluation for movement control of upper extremity prostheses,” IEEE Trans. Rehabil. Eng., 3, No. 4, 324–333 (1995).
A. Phinyomark, F. Quaine, S. Charbonnier, et al., “EMG feature evaluation for improving myoelectric pattern recognition robustness,” Expert Syst. Appl., 40, No. 12, 4832–4840 (2013), https://doi.org/10.1016/j.eswa.2013.02.023.
K. Englehart, B. Hudgins, P. A. Parker, and M. Stevenson, “Classification of the myoelectric signal using time-frequency based representations,” Med. Eng. Phys., 21, No. 6–7, 431–438 (1999), https://doi.org/10.1016/s1350-4533(99)00066-1.
J.-U. Chu, I. Moon, and M.-S. Mun, “A real-time EMG pattern recognition system based on linear-nonlinear feature projection for a multifunction myoelectric hand,” IEEE Trans. Biomed. Eng., 53, No. 11, 2232–2239 (2006).
K. E. Member, B. H. Member, P. A. Parker, and S. Member, “A wavelet based continuous classification scheme for multifunction myoelectric control,” IEEE Trans. Biomed. Eng., 48, No. 3, 1–31 (2001).
H. Huang, F. Zhang, L. J. Hargrove, et al., “Continuous locomotion-mode identification for prosthetic legs based on neuromuscular--mechanical fusion,” IEEE Trans. Biomed. Eng., 58, No. 10, 2867–2875 (2011), https://doi.org/10.1109/TBME.2011.2161671.
R. Gupta and R. Agarwal, “Electromyographic signal-driven continuous locomotion mode identification module design for lower limb prosthesis control,” Arab. J. Sci. Eng. (2018), https://doi.org/10.1007/s13369-018-3193-3.
R. Gupta, I. S. Dhindsa, and R. Agarwal, “Continuous angular position estimation of human ankle during unconstrained locomotion,” Biomed. Signal Process. Control, 60, 101968 (2020).
R. Gupta and R. Agarwal, “Continuous human locomotion identification for lower limb prosthesis control,” CSI Trans. ICT, 6, 1–15 (2017), https://doi.org/10.1007/s40012-017-0178-4.
H. Huang, T. A. Kuiken, and R. D. Lipschutz, “A strategy for identifying locomotion modes using surface electromyography,” IEEE Trans. Biomed. Eng., 56, No. 1, 65–73 (2009), https://doi.org/10.1109/TBME.2008.2003293.
A. L. Delis, J. L. A. Carvalho, A. F. Da Rocha, et al., “Estimation of the knee joint angle from surface electromyographic signals for active control of leg prostheses,” Physiol. Meas., 30, No. 9, 931–946 (2009), https://doi.org/10.1088/0967-3334/30/9/005.
F. Zhang, P. Li, Z.-G. Hou, et al., “sEMG-based continuous estimation of joint angles of human legs by using BP neural network,” Neurocomputing, 78, No. 1, 139–148 (2012).
I. S. Dhindsa, R. Agarwal, and H. S. Ryait, “Performance evaluation of various classifiers for predicting knee angle from electromyography signals,” Expert Syst., 36, No. 3, e12381 (2019), https://doi.org/10.1111/exsy.12381.
C.-L. Huang and J.-F. Dun, “A distributed PSO–SVM hybrid system with feature selection and parameter optimization,” Appl. Soft Comput., 8, No. 4, 1381–1391 (2008).
Eberhart and Y. Shi, “Particle swarm optimization: developments, applications and resources,” Proc. 2001 Congr. Evol. Comput., 1, 81–86 (2001), https://doi.org/10.1109/CEC.2001.934374.
J. Kennedy and R. C. Eberhart, “A discrete binary version of the particle swarm algorithm,” 1997 IEEE Int. Conf. Sys., Man Cybern. Comput. Cybern. Simul., 5, 4104–4108 (1997), https://doi.org/10.1109/ICSMC.1997.637339.
I. S. Dhindsa, R. Agarwal, and H. S. Ryait, “Principal component analysis-based muscle identification for myoelectric-controlled exoskeleton knee,” J. Appl. Stat., 44, No. 10, 1707–1720 (2017), https://doi.org/10.1080/02664763.2016.1221907.
B. Frericks, “The recommendations for sensors and sensor placement procedures for surface electromyography,” SENIAM Deliv. 8, Eur. Recomm. Surf. Electromyogr., 15–53 (1999).
L. J. Hargrove, G. Li, K. B. Englehart, and B. S. Hudgins, “Principal components analysis preprocessing for improved classification accuracies in pattern-recognition-based myoelectric control,” IEEE Trans. Biomed. Eng., 56, No. 5, 1407–1414 (2009), https://doi.org/10.1109/TBME.2008.2008171.
B. Hudgins, P. Parker, R. N. Scott, B. Hudgins, P. Parker, and R. Scott, “A new strategy for multifunction myoelectric control,” IEEE Trans. Biomed. Eng., 40, No. 1, 82–94 (1993), https://doi.org/10.1109/10.204774.
J. Virmani, V. Kumar, N. Kalra, and N. Khandelwal, “SVM-based characterization of liver ultrasound images using wavelet packet texture descriptors,” J. Digit. Imaging, 26, No. 3, 530–543 (2013), https://doi.org/10.1007/s10278-012-9537-8.
A. Ganapathiraju, J. E. Hamaker, and J. Picone, “Application of support vector machines to speech recognition,” IEEE Trans. Signal Process., 52, No. 8, 2348–2355 (2004), https://doi.org/10.1109/TSP.2004.831018.
S. Tong and D. Koller, “Support vector machine active learning with applications to text classification,” J. Mach. Learn. Res., 2, No. Nov, 45–66 (2001), https://doi.org/10.1162/153244302760185243.
S.-W. Lin, K.-C. Ying, S.-C. Chen, and Z.-J. Lee, “Particle swarm optimization for parameter determination and feature selection of support vector machines,” Expert Syst. Appl., 35, No. 4, 1817–1824 (2008), https://doi.org/10.1016/j.eswa.2007.08.088.
M. Pardo and G. Sberveglieri, “Classification of electronic nose data with support vector machines,” Sensors Actuators B Chem., 107, No. 2, 730–737 (2005).
S.-C. Chen, S.-W. Lin, and S.-Y. Chou, “Enhancing the classification accuracy by scatter-search-based ensemble approach,” Appl. Soft Comput., 11, No. 1, 1021–1028 (2011).
C.-W. Hsu, C.-C. Chang, and C.-J. Lin, “A practical guide to support vector classification” (2003).
R. Gupta and R. Agarwal, “sEMG interface design for locomotion identification,” Int. J. Electr. Comput. Eng., 11, No. 2, 66–75 (2017).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Dhindsa, I.S., Gupta, R. & Agarwal, R. Binary Particle Swarm Optimization-Based Feature Selection for Predicting the Class of the Knee Angle from EMG Signals in Lower Limb Movements. Neurophysiology 53, 109–119 (2022). https://doi.org/10.1007/s11062-022-09922-y
Received:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11062-022-09922-y