
Abstract
Acoustic-induced nanoparticle self-assembly has good development prospects in tailored, bottom-up material design. Acoustic tweezers technology is used for nanoparticle manipulation due to its versatility, non-invasiveness, and biocompatibility; it can manipulate particles of various physical properties and will not cause damage when manipulating cells. In addition, the wide range of acoustic frequencies allows acoustic tweezers to manipulate particles ranging in size from nanometers to millimeters (100–10 mm). Although acoustic tweezers exhibit unique advantages in particle manipulation, there are still few reviews on the assembly of particles induced by standing acoustic tweezers, especially in the area of three-dimensional particle assembly. In this review, we summarized the characteristics of acoustic micro-nano manipulation technology by comparing acoustic tweezers with optical tweezers and magnetic tweezers. Furthermore, we categorized the latest progress in particle assembly by standing wave acoustic tweezers using different dimensions as a framework: acoustic tweezers’ definition, mechanism, and expression formula are also introduced. Finally, we provided opinions and insights on technical obstacles and development prospects.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Introduction
Self-assembly is the process by which system components (such as molecules, polymers, colloids, and particles) are organized into ordered or functional structures without human intervention (Grzybowski et al. 2009). The self-assembly of nanoparticles has excellent development potential and is an important method to make functional materials and devices (Abdellatif et al. 2015, 2018, 2016a, 2016b; Abdellatif and Azab 2018, 2019; Yang et al. 2021; Grzelczak et al. 2010). Non-contact manipulation does not depend on other auxiliary substances, does not generate any unnecessary contamination, and the process can be continuous, still maintaining the original characteristics of the particles. To efficiently control the self-assembly of nanoparticles, non-contact manipulation of particles under the action of an external field, e.g., optics (Zhang and Liu 2008; Ashkin and Dziedzic 1987), magnetic (Lebel et al. 2014; Vlaminck and Dekker 2012), and acoustic (Meng et al. 2019), has been the focus of research.
Acoustic tweezers are a newly developed particle manipulation technology and exhibit unique advantages in the non-contact manipulation of micro-nano objects (such as cells (Hartono et al. 2011), particles (Ding et al. 2013), organisms (Tian et al. 2019), or fluids (Miansari and Friend 2016)). The invention of many acoustic tweezers is inspired by optical tweezers (Ozcelik et al. 2018). The term “optical tweezers” was initially used in 1986 to describe a tightly focused beam that enables microparticle manipulation. Although optical tweezers are widely used in biomedicine and have made many achievements (Zhang and Liu 2008; Moffitt et al. 2008; Polimeno et al. 2018), it requires complicated optical hardware, and high-power laser manipulation may damage the cell sample (Rasmussen et al. 2008). The basic magnetic tweezers consist of a pair of permanent magnets that manipulate magnetic particles through a magnetic field. Magnetic tweezers can perform non-invasive force and displacement measurements in complex environments (Bausch et al. 1999) and are easier to implement (Strick et al. 2000a). Magnetic tweezers have the ability to rotate objects, making them suitable for DNA manipulation (Charvin et al. 2005; Strick et al. 2000b). However, magnetic tweezers are only suitable for the manipulation of magnetic particles; otherwise, the particles to be manipulated need to be pretagged (Neuman and Nagy 2008). Acoustic tweezers technology breaks through the limitations mentioned above of optical tweezers and magnetic tweezers. It can manipulate particles of various physical properties and will not cause damage when manipulating cells (Wiklund 2012; Lam et al. 2016). The wide range of acoustic frequencies allows acoustic tweezers to manipulate particles ranging in size from nanometers to millimeters (Meng et al. 2019; Baresch et al. 2016; Drinkwater 2016; Destgeer and Sung 2015). These features have made acoustic tweezers employed in numerous applications, such as crystal self-assembly (Guevara Vasquez and Mauck 2019), cell patterning and culture (Primo and Mata 2021), soft robots (Li et al. 2019), and 3D printing (Wadsworth et al. 2020; Llewellyn-Jones et al. 2016), to name a few.
In particle manipulation, acoustic tweezers rely on acoustic radiation force (ARF) and the drag force caused by acoustic streaming (AS) as the dominant force to move and suspend particles (Baudoin and Thomas 2020). In 1991, Wu first used acoustic tweezers composed of two collimated focused ultrasonic transducers to manipulate latex particles and frog eggs (Wu 1991). Since then, various types of acoustic tweezers have been designed and applied to life science and engineering applications (Friend and Yeo 2011; Zhang et al. 2008). Acoustic tweezers are mainly divided into traveling wave tweezers, AS tweezers, and standing wave tweezers. Traveling wave tweezers are usually based on a focused acoustic field to manipulate particles (Peng et al. 2021). The traveling wave will generate a unidirectional force to keep particles moving along the direction of wave propagation, making traveling wave acoustic tweezers suitable for particle sorting (Destgeer et al. 2013, 2014; Ahmed et al. 2018). Acoustic tweezers manipulate particles in the liquid through the steady flow of the liquid that has absorbed sound energy (Sadhal 2012). They are mainly used for pumping, fluid mixing, and 3D rotation of particles (Bernassau et al. 2014; Huang et al. 2014). Standing wave tweezers have two subtypes, that is, bulk acoustic waves (BAWs) based and surface acoustic waves (SAWs) based tweezers (Ozcelik et al. 2018). In the standing wave field, the ARF is the dominant force to move particles to nodes or anti-nodes (Courtney et al. 2012). By adjusting parameters such as the amplitude and phase of the transducer, the position of the node will change (Wu and Chang 2005; Meng et al. 2011), enabling complex patterning of micro-nano particles. Since the standing wave field is a strong-gradient field that is easy to construct, they are widely used in particle aggregation, arrangement, separation, and patterning manipulations (Meng et al. 2019).
Although a series of retrospective reviews summarized the development and application of acoustic tweezers (Meng et al. 2019; Ozcelik et al. 2018; Baudoin and Thomas 2020; Zhang et al. 2008; Mohanty et al. 2020), no review has summarized the application of standing wave acoustic tweezers in the self-assembly of micro-nano structures. This article focuses on the acoustic manipulation theory and experimental progress of BAW-based and SAW-based standing wave acoustic tweezers in the field of micro/nanoparticle self-assembly in the last decade: the characteristics of acoustic micro-nano manipulation technology are summarized by comparing acoustic tweezers with optical tweezers and magnetic tweezers; the definition, mechanism, and expression formula of acoustic tweezers are introduced; the latest progress in particle self-assembly by standing wave acoustic tweezers are categorized using different dimensions as a framework, and these contents are made into two tables, as shown in Table 1 and Table 2; the opinions and insights on technical obstacles and development prospects are also provided.
Acoustic micro-nano-manipulation techniques
The research and application of micro-nano manipulation techniques have become one of the important disciplines in science and technology today and have led to tremendous progress and even revolutionary breakthroughs in other fields of science and technology. Micro-nano techniques have been widely used in traditional engineering fields such as biomedicine (Blankenstein and Wechsung 2005), aerospace (Hunter et al. 2010), materials science (Wang et al. 2012), energy and environmental engineering (Gammaitoni 2012; Xiao et al. 2019), electrical circuits (Shimoda et al. 2003), chemical metallurgy (Mücklich et al. 2006), and mechanical manufacturing (Xc et al. 2008). A series of applications such as micro-nano engineering (Yabe et al. 2004), micro-electromechanical systems (Xu and Jia 2013), biomimetic robots (Wang et al. 2006), and very large-scale integrated circuits (Goodman et al. 2005) are formed.
At present, micro-manipulation techniques are mainly divided into two categories. One category is to use mechanical tools, such as micropipette (Schalbetter et al. 2021), atomic force microscope (Ramachandran et al. 1998), and microgripper (Menciassi et al. 2001), to directly apply a contact-adjustable force to the target objects. The other is non-contact manipulation techniques represented by magnetic tweezers (Vries et al. 2005), optical tweezers (Ashkin et al. 1986; Lou et al. 2021), and acoustic tweezers (Wu 1999). In the abovementioned micro-nano manipulation method, the acoustic tweezers use the physical effects of the ultrasonic field: ARF and AS to realize the concentration (Collins et al. 2016), generation (Tang et al. 2018), separation (Sehgal and Kirby 2017), alignment (Smorodin et al. 2010), and patterning (Shi et al. 2009a) of micro-nano particles. Compared to other types of micro-nano control methods, as shown in Table 3, acoustic tweezers exhibit low selectivity to the physical properties of the manipulated particles and less damage to biological samples. These characteristics make acoustic tweezers have a wide range of engineering applications.
Acoustic tweezers are of critical importance in capturing and assembling particles, and user-specified pattern arrangements can be achieved by controlling the transducer arrangement and operating parameters (Greenhall et al. 2016). The forward problem requires the calculation of the particle pattern generated by the user-specified ultrasonic transducer parameters (Grzelczak et al. 2010), and the inverse problem involves the calculation of the ultrasonic transducer parameters required to assemble the user-specified particle pattern (Grinenko et al. 2012; Greenhall et al. 2013; Bernassau et al. 2013a). By adjusting parameters such as the amplitude and phase, the patterns of particles can be changed. The accuracy of the experimentally obtained pattern in relation to the user-specified pattern can be quantified by means of numerical analysis (Prisbrey et al. 2017).
Particle assembly mechanism
The self-assembly of the particles or cells reviewed in this review mainly depends on ARF in the standing wave field. Particles with different acoustic contrast factor are captured at nodes or anti-nodes to achieve a series of operations such as aggregation, arrangement, and patterning.
Wave generation and propagation
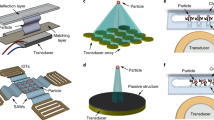
A piezoelectric transducer usually generates the ultrasonic field in the ultrasonic micro-nano manipulation techniques. It is a device that converts electrical energy input into mechanical energy output based on the piezoelectric effect. A piezoelectric transducer is composed of piezoelectric elements and other metal parts (Katzir 2003). Piezoelectric materials can be natural, such as quartz and sugarcane, and synthetic materials, such as lead zirconate titanate piezoelectric ceramics (PZT) and zinc oxide piezoelectric ceramics (ZnO) (Hu 2014; Dual et al. 2014). The two waves generated in the volume and along the surface of the elastic medium are usually called BAW and SAW (Zhang et al. 2008). BAW converts electrical signals into mechanical waves through piezoelectric transducer. In contrast, SAW is usually generated by interdigital transducers (IDT) patterned on a piezoelectric substrate surface. One-dimensional (1D), two-dimensional (2D), and three-dimensional (3D) manipulation of particles can be achieved by exciting single or multiple PZTs/IDTs to generate pressure fields (Han et al. 2021; Zhu et al. 2021).
The sound wave will carry a certain amount of energy and momentum in the process of propagation, and objects in the sound field will scatter, refract, and absorb the sound wave to a certain extent, resulting in the exchange of energy and momentum and a consequent effect by ARF (Gor’Kov 1962). In engineering estimation and finite element calculations, we generally use the Gor’kov method to solve the acoustic radiation. The following four conditions must be met when using Gor’kov solving ARF method: (1) an equivalent spherical particle shape, (2) medium is a viscous fluid, (3) the wavelength of the sound wave is much larger than the radius of the sphere, (4) does not consider the multiple scattering effects of sound waves on the surface of the object in the sound field. Based on these conditions, Gor’kov (Gor’Kov 1962) writes the force, F, in terms of a potential U, such that
The potential for a spherical particle of radius \(a\), sound speed \({\mathrm{c}}_{0}\), density \({\rho }_{0}\), and bulk modulus \({{\mathrm{K}}_{0}=\uprho }_{0}({\mathrm{c}}_{0}^{2}-4/3{\mathrm{c}}_{0}^{2})\) in a fluid of density \(\rho\), sound speed c, and bulk modulus \(\mathrm{K}=\uprho {\mathrm{c}}^{2}\) is given by
where \(\overline{{p }^{2}}\) is the mean square pressure of the incident wave at the particle position and \(\overline{{v }^{2}}\) is the mean-squared velocity.
AS
AS is a kind of flow in the medium caused by the change of the spatial gradient of the sound field due to the viscous attenuation when the acoustic field propagates in the medium (Frommelt et al. 2008), and there are three types of AS (Wiklund et al. 2012).
-
Schlichting streaming and Rayleigh streaming: Schlichting streaming and Rayleigh streaming are the boundary layer-driven steaming caused by energy dissipation in the acoustic viscous boundary layer (Meng et al. 2019; Boluriaan and Morris 2003). When the acoustic field propagates along with the solid–liquid interface, the AS field is generated inside and outside the boundary layer due to the attenuation of the boundary layer viscosity (Nyborg 1958). This type of AS field can usually be observed in a cavity or channel, and the length of the solid boundary along the propagation direction of the acoustic field needs to be greater than a quarter wavelength. Suppose there is a standing wave acoustic field parallel to the solid surface in the cavity or channel. In that case, the viscous attenuation of the acoustic field in the boundary layer will produce a stable acoustic flow field, and the sound pressure usually determines the flow direction of the acoustic flow field in the standing wave acoustic field. Moreover, the flow direction of the acoustic flow field is usually from sound pressure anti-nodes to pressure nodes. Since the node and anti-node positions have been fixed in space, the boundary layer will generate a stable Schlichting streaming field (Boluriaan and Morris 2003). Once the acoustic flow field in the boundary layer is generated, due to its strong flow, a vortex field with the opposite direction of rotation will be induced in the medium outside the boundary layer, which is generally called Rayleigh streaming (Westervelt 1953).
-
Eckart streaming: Eckert streaming is the result of the acoustic energy being absorbed in the bulk of the fluid (Eckart 1948; Lighthill 1978). When the acoustic field propagates through the medium, a part of the energy of the acoustic field will be absorbed by the medium. The gradient change of the sound pressure in space will change the acoustic momentum flux, thereby forming a jet-like flow in the sound beam along the acoustic field propagation direction. In a cavity or channel with a finite length, when the flow along the sound field propagation direction hits the cavity wall or channel wall, the direction of the streaming field will change, thereby forming a stable AS field in the cavity or channel.
-
Drag force: Streaming flow will induce the stokes’ drag force, which can dominate the suspended particles around the streaming flow. At a low Reynolds number, the Stokes’ drag force acted on a particle can be calculated by an equation given below (Gao et al. 2020):
$${F}_{D}=-6\pi \mu {R}_{p}v$$(3-3)
where \(\mu\) denotes the fluid viscosity, \(v\) is the relative velocity between the fluid and particles, and \({R}_{p}\) is the radius of the particle.
Self-assembly of particles induced by SAW
SAWs are mechanical waves discovered by Lord Rayleigh in 1885 (Rayleigh et al. 1885). The most common SAW device is composed of a piezoelectric substrate and an IDT printed on the surface of the piezoelectric substrate (Agostini and Cecchini 2021). SAW has two substyles, that is, standing surface acoustic waves (SSAW) (Lei and Hu 2020; Meng et al. 2012; Nam et al. 2011) and traveling surface acoustic waves (TSAW) (Destgeer et al. 2014; Mohanty et al. 2020; Franke et al. 2009). In this review, we mainly introduce particle assembly by SSAW.
1D particle assembly
Acoustic tweezer technology has enabled the aggregation and separation of particles or cells within a microfluidic channel between a pair of oppositely placed IDTs. Considering that magnetic (Mccloskey et al. 2003), hydrodynamic (Huang et al. 2004; Takagi et al. 2005), and dielectrophoresis (Doh and Cho 2005; Pethig 2010) technologies in microfluidic systems have their disadvantages in particle aggregation, Shi et al. (Shi et al. 2008) introduced a new focusing technique, the SSAW focusing technique. They placed the microfluidic channel between a pair of opposing IDTs and designed the channel width to cover only one pressure node, as shown in Fig. 1. As the particles pass through, they gather at the center of the channel under the action of ARF. The method has simple equipment and a fast aggregation rate and can be used for particles with different physical properties and sizes. On this basis, Shi et al. (Shi et al. 2009b) used a similar device to separate the particles. Particles with the same physical properties but different sizes are mixed and injected into the channel. Since the ARF acting on large particles is larger than that on small particles, large particles move toward the center of the channel, and tiny particles move toward both sides of the channel. In 2017, Wu et al. (Wu et al. 2017) successfully applied acoustic tweezer technology to isolate exosomes from whole blood and achieved the separation of nano-scale exosomes from whole blood with a removal rate of over 99%, as shown in Fig. 2. In addition to the research on commonly used interdigital transducers, Ding et al. (Ding et al. 2012a) used pairs of slanted-finger interdigital transducers (SFIT) to reconstruct particle patterns in microfluidic channels. They used the equipment shown in Fig. 3 to realize the 1D assembly of fluorescent polystyrene beads, proving that different kinds of IDTs could also achieve dynamic patterning of particles.

a SSAW generated by two oppositely placed IDTs. c–f are the aggregation of the (I–IV) area in b respectively (reprinted with permission from (Shi et al. 2008))

a Schematic of the acoustic fluid device used to separate exosomes. b Separation of microparticles and nanoparticles (reprinted with permission from (Wu et al. 2017))

1D dynamic pattern of fluorescent polystyrene beads induced by SSAW produced by two opposed SFITs (reprinted with permission from (Ding et al. 2012a))
2D particle assembly
Two pairs of orthogonal placed IDTs generate the 2D SSAWS field. 1D SSAW field is used to focus and separate particles or cells; 2D SSAWS is mainly used to pattern particles or cells. The interference between the two counter-propagated traveling surface acoustic waves produces a standing wave field on the substrate, and the particles dispersed in the liquid are taped in the node or the anti-node when the SSAW is turned ON, thereby realizing particle arrangement. Wood et al. (Wood et al. 2009) demonstrated that the particles self-assemble to form a 2D square array in the standing wave field generated by two pairs of orthogonally placed IDTs, as shown in Fig. 4c. When parameters, such as frequency and phase change, the shape of the pattern changes. Ding et al. (Ding et al. 2012b) proposed a SAW-based acoustic manipulation method that can accurately control the movement of individual particles/cells/organisms along a specified path in a 2D single-layer microfluidic channel. His team demonstrated the feasibility of 2D manipulation and arrangement of bovine red blood cells and C. elegans. The bovine red blood cells were arranged into different letters by precisely tuning the input signal frequency (Fig. 5d). The viability and proliferation ability of cancer cells (HeLa cells) exposed to a high-power (23 dBm) SAW field were found not significantly influenced, confirming the biocompatibility of the SAW technique. In their subsequent study, movement and stretching of the C. elegans were achieved by the SAW technique without causing physical damage. The researcher also demonstrated that although SAW acoustic tweezer cannot select a single particle from a cluster of particles, it can simultaneously operate a single particle at multiple pressure nodes.

a The four-port acoustic wave device. b SAW off. c SAW on (reprinted with permission from (Wood et al. 2009))

a SSAW generated by two pairs of orthogonally placed IDTs. b Node location changes with frequency. c Polystyrene balls are assembled into the letters “PNAS” under the induction of the acoustic field. d Dynamically control the assembly of bovine red blood cells into the letters “PSU” (reprinted with permission from (Ding et al. 2012b))
3D particle assembly
3D particle manipulation has always been a difficult point in research. In 2011, Shi et al. (Shi et al. 2011) found that although particles can move vertically in a 1D SSAW field, the movement was not apparent due to the weak ARF in the vertical direction. In their following study, the team designed a new device to produce a 2D SSAW field, as shown in Fig. 6a (Guo et al. 2016). In the new device, the signal passes through two pairs of orthogonally placed IDTs to produce a 2D displacement field on the surface of the substrate (Redwood 1967). Figure 6 b shows that the acoustic wave propagating in the fluid medium is reflected by the chamber wall and establishes a 3D, differential Gor’kov potential field (Gor’Kov 1962). The vibration of the substrate surface introduces acoustic flow in the vertical direction and generates a drag force to balance gravity. The simultaneous action of ARF and acoustic flow creates a 3D acoustic potential trap in the chamber to trap the particles, and the vertical movement can be controlled by changing the input power. Figure 6 c and d show that cells and particles can be assembled into different patterns under the induction of 3D acoustic tweezers. In Fig. 6 d, at the node indicated by the blue circle, the particles can be assembled along the z-axis and can move along the y-axis. In another study, Nguyen et al. (Nguyen et al. 2018) studied the height range that particles can accurately move in the vertical direction and used a new method to enable the particles to move to a higher height, i.e., up to 1 mm. Recently, to achieve precise control of the particle position in three dimensions, Tan et al. (Tan et al. 2020) developed a fluid closed-loop control system that combines computer vision technology and SSAW to automatically manipulate surface acoustic wave devices’ relative phase and power. The combination of these two technologies realizes the visualization and precise manipulation of particles in three dimensions. They demonstrated the ability of particles to move vertically and can manipulate particles to move along rectangular paths, as shown in Fig. 7f. Their research paved the way for the precise assemble of microparticles and particles in 3D dimensions.

a Configuration of the planar surface acoustic wave generators. b 3D acoustic field numerical simulation. c Under the induction of 3D acoustic tweezers, HeLa S3 cells assemble into patterns of “3,” “D,” “A,” and “T.” d The particles are assembled into a stable array in a 3D field (reprinted with permission from (Guo et al. 2016))

a Illustration of closed-loop control system operation. b–d The particles move according to the specified path. e A process in which particles move to the position of the target point. f–i Vertical movement of particles (reprinted with permission from (Tan et al. 2020))
Self-assembly of particles induced by BAW
BAW has been applied to particle manipulation and exhibits some advantages, such as flexible placement of transducers and versatile settings (Gao et al. 2020). BAW is usually produced by the thickness or lateral vibration mode of piezoelectric ceramic elements. By designing a microfluidic channel or fluid cavity, the particles in liquid can be manipulated by BAWs (Hawkes et al. 2002; Nilsson et al. 2004). Compared with SAW-based standing acoustic tweezers, BAW-based standing acoustic tweezers generally work at lower frequencies and longer wavelengths and therefore can manipulate larger particles (Ivo et al. 2015; Shu et al. 2018).
1D particle assembly
A typical 1D particle assembly uses bulk acoustic waves to manipulate particle aggregation and separation in the channel. A PZT can resonate in the microfluidic channel to generate BAWs. Devendran et al. (Devendran et al. 2014) created a system that uses BAWs to separate particles in a microfluidic channel; under the action of ARF and AS, 3-micron and 10-micron polystyrene particles can be separated into different locations and remain stable. Collins et al. (Collino et al. 2016) used microfluidic print nozzles to achieve the deposition of ordered two-phase materials. In their work, the author uses a single PZT to generate a standing wave field in the microchannel to gather particles, as shown in Fig. 8. Using this method to print microstructures can effectively reduce nozzle clogging. Similarly, Fornell et al. 2018 successfully separated two kinds of spheres, polystyrene, and in-house synthesized polydimethylsiloxane (PDMS) with different acoustic contrast factors. The proposed method is conducive to the diversification of microfluidic operations and paves the way for separating binary particles in fluid. In addition to using a single PZT to achieve 1D manipulation of particles in a microfluidic channel, the standing wave field generated by a pair of PZTs can also be used to manipulate particles in a polygonal cavity (Gesellchen et al. 2014; Bernassau et al. 2013b). Andrade et al. (Andrade et al. 2016) designed an octagonal device to separate particles with diameters of 6–45 μm. By stimulating two opposing transducers, standing waves can be generated in the cavity to achieve particle aggregation at the nodes. Recently, Cohen et al. (Cohen et al. 2020) used a radial piezoelectric transducer with an inner diameter of 22 mm to make a concentric circle pattern by the self-assembly of 2-μm polystyrene beads. In their study, the radial piezoelectric transducer generates BAWs in the cylindrical cavity, and the cells are assembled on the surface of PZT. The cells grow branches within a few days after the piezoelectric transducer is removed (Fig. 9a). This study laid a specific foundation for 2D particle patterning using BAW.

a A single PZT generates BAW to control particle aggregation in the microfluidic channel. b Particles with positive acoustic contrast factor are trapped at the pressure nodes; particles with negative are trapped at the anti-nodes. c, d Particles of different properties are separated when piezo on e schematic of a printing device. f Aggregation under different voltages. g Aggregation under different flow rates (reprinted with permission from (Collino et al. 2016))

a Cells self-assembly process. b Experimental equipment image. c Image of the directed assembly of particles with 1.14 MHz at 10 Vpp. d Width as a function of time for various applied voltages using neural cells (PC12). e Particles self-assembly process (reprinted with permission from (Cohen et al. 2020))
2D particle assembly
The 2D manipulation of particles can be achieved by relying on two pairs of orthogonally placed PZT, a single PZT, or using two pairs of orthogonal poles on one PZT. Haake et al. used shear piezoelectric ceramic transducers to excite and perform 2D manipulation of particles (Haake and Dual 2005) and cells (Haake et al. 2010) in the fluid layer between a glass plate and a passive reflector. Two pairs of vertically placed transducers are excited to generate a 2D displacement field and coupled to the fluid layer by vibration, driving particles to assemble into 2D patterns. A new 2D manipulation method was proposed by Oberti et al. (Oberti et al. 2007). Their team used a single actuator to establish a field of BAWs in a fluid chamber and changed the spacing between captured particles by tuning the excitation signal. In Fig. 10 a, a 2D pressure field is generated by exciting the orthogonal electrodes on the surface of the PZT. In another article, Raeymaekers et al. (Raeymaekers et al. 2011) presented the use of BAWs to achieve the patterning of nanoparticles for the first time. Two PZTs are placed adjacent to each other inside the rectangular cavity to generate 2D BAWs in the liquid chamber, enabling the patterning of particles with a 5-nm diameter by trapping them at the nodes. The above studies can be classified as 2D static manipulation of particles. Tian et al. (Tian et al. 2016) demonstrated that water-rich droplets in the aqueous phase can assemble into tightly stacked crystals. This assembly resulted from the BAW-induced spontaneous formation of 2D arrays, enabling reversible dynamic changes of the arrays (Figs. 11 and 12). This research provides a new way to design and construct “water-in-water” micro-droplet arrays with controllable spatial organization and high-order collective behavior. Recently, Hou et al. (Hou et al. 2020) proposed the use of parametric bulk acoustic waves to achieve deformable dynamic patterning of multiple particles. By changing the input frequency and phase, the rotation and deformable oscillation of the nodal line segment can be realized. This research is conducive to the development of multi-particle dynamic self-assembly.

a BAW generated by a single PZT. b 2D array formation process. c Dynamic manipulation to achieve continuous changes of spherical and non-spherical droplets (reprinted with permission from (Oberti et al. 2007))

a BAW generated by two pairs of orthogonally placed PZTs. b 2D array of spherical droplets. c 2D array of non-spherical droplets. d, e 2D array reversible dynamic transformation (reprinted with permission from (Tian et al. 2016))

a BAW generated by activating a pair of PZTs placed in parallel. b Node lines assembled by activating a pair of PZTs placed in parallel. c, d 2D array in different phases (reprinted with permission from (Hou et al. 2020))
3D particle assembly
In recent years, the particle manipulation of 3D fields has increasingly attracted the interest of researchers. Greenhall et al. (Greenhall et al. 2016) derived a 2D solution to the inverse problem and proved the 2D ultrasound-guided self-assembly of nanoparticles with user-specified patterns in a square liquid chamber. Prisbrey et al. (Prisbrey et al. 2017) then expanded this solution to prove the ultrasonic guided self-assembly of 3D user-specified particle patterns in fluid media. In the same year, Doruk et al. (Doruk et al. 2017) reported a new method of combining hexagonal acoustic tweezers and a 3D lithography machine for particle assembly in the 3D printing process to manufacture conductive 3D microstructures and embedded electronic components, as shown in Figs. 13 and 14. This acoustic induction method allows better control over particle distribution and orientation, but attention should be paid to pattern design to minimize unwanted inductance. BAWs have been used in bioengineering to fabricate and assemble living tissues and organs (Ouyang et al. 2020; Olofsson et al. 2018; Reversible Design of Dynamic Assemblies at Small Scales 2020; Guex et al. 2021). For example, to address some challenges in brain bioengineering, such as the random distribution of neurons cannot fully represent the microenvironment of the brain and the operational complexity of the in vitro 3D bioengineering, Bouyer et al. (Bouyer et al. 2016) presented a bio-acoustic suspension assembly method to engineer a multilayer, 3D brain-like structure. Acoustic radiation acts on neuro-progenitors derived from human embryonic stem cells, and the neuro-progenitor cells are then differentiated and extended into a 3D neuronal construct. This method promotes the research of 3D microstructure reconstruction of native tissues.

a Assembly of the magnetic core cavity. b 3D schematic diagram of core cavity. c Zigzag stitch pattern assembly. d Schematic diagram of Zigzag stitch pattern (reprinted with permission from (Doruk et al. 2017))

Multilayer neural structure assembly (reprinted with permission from (Bouyer et al. 2016))
Conclusions and perspectives
As summarized in this review, SAW-based standing wave acoustic tweezers have shown powerful capabilities in microfluidic applications, especially in life sciences, whereas BAW-based standing wave acoustic tweezers can handle high-flux fluids and are more suitable for 3D printing and structural assembly of new materials. Although acoustic tweezers have achieved substantial development, some issues still need to be addressed to promote their applications. For SAW-based standing wave acoustic tweezers, the use of other piezoelectric substrates, such as polyvinylidene fluoride (PVDF) flexible films for the development of wearable devices, facilitates the expansion of this acoustic tweezer technology into the field of flexible sensors. For BAW-based standing wave acoustic tweezers, the accuracy of particle manipulation and the diversity of assembly patterns need to be improved. To increase the popularization of standing wave acoustic tweezers technology in the future, measures such as further miniaturization of equipment, improvement of equipment integration, and cost reduction need to be further promoted.
References
Grzybowski BA, Wilmer CE, Kim J, Browne KP, Bishop KJ (2009) Self-assembly: from crystals to cells. Soft Matter 5(6):1110–1128. https://doi.org/10.1039/b819321p
Abdellatif MH, Abdelrasoul GN, Scarpellini A, Marras S, Diaspro A (2015) Induced growth of dendrite gold nanostructure by controlling self-assembly aggregation dynamics. J Colloid Interface Sci 458(15):266–272. https://doi.org/10.1016/j.jcis.2015.07.055
Abdellatif MH, Azab AA (2018) Fractal growth of ferrite nanoparticles prepared by citrate-gel auto-combustion method. SILICON 10(5):1991–1997. https://doi.org/10.1007/s12633-017-9711-1
Abdellatif MH, Azab AA (2019) Elastic properties of cr-doped mn ferrite. Bull Natl Res Cent 43 (1).https://doi.org/10.1186/s42269-019-0143-5
Abdellatif MH, Azab AA, Salerno M (2018) Effect of rare earth doping on the vibrational spectra of spinel mn-cr ferrite. Mater Res Bull 97:260–264. https://doi.org/10.1016/j.materresbull.2017.09.012
Yang K, Zhang S, He J, Nie Z (2021) Polymers and inorganic nanoparticles: a winning combination towards assembled nanostructures for cancer imaging and therapy. Nano Today 36:101046. https://doi.org/10.1016/j.nantod.2020.101046
Grzelczak M, Vermant J, Furst EM, Liz-Marzán LM (2010) Directed Self-Assembly of Nanoparticles. ACS Nano 4(7):3591–3605. https://doi.org/10.1021/nn100869j
Abdellatif MH, Ghosh S, Liakos I, Scarpellini A, Marras S, Diaspro A, Salerno M (2016a) Effect of nanoscale size and medium on metal work function in oleylamine-capped gold nanocrystals. J Phys Chem Solids 89:7–14. https://doi.org/10.1016/j.jpcs.2015.09.012
Abdellatif MH, Marco S, Abdelrasoul GN, Ioannis L, Alice S, Sergio M, Alberto D (2016b) Effect of anderson localization on light emission from gold nanoparticle aggregates. Beilstein J Nanotechnol 7(1):2013–2022. https://doi.org/10.3762/bjnano.7.192
Zhang H, Liu K-K (2008) Optical tweezers for single cells. J R Soc Interface 5(24):671–690. https://doi.org/10.1098/rsif.2008.0052
Ashkin A, Dziedzic JM (1987) Optical trapping and manipulation of viruses and bacteria. Science 235(4795):1517–1520. https://doi.org/10.1126/SCIENCE.3547653
Lebel P, Basu A, Oberstrass FC, Tretter EM, Bryant Z (2014) Gold rotor bead tracking for high-speed measurements of DNA twist, torque and extension. Nat Methods 11(4):456–462. https://doi.org/10.1038/nmeth.2854
De Vlaminck I, Dekker C (2012) Recent advances in magnetic tweezers. Annu Rev Biophys 41:453–472. https://doi.org/10.1146/annurev-biophys-122311-100544
Meng L, Cai F, Li F, Zhou W, Niu L, Zheng H (2019) Acoustic tweezers. J Phys D Appl Phys 52(27):273001. https://doi.org/10.1088/1361-6463/ab16b5
Hartono D, Liu Y, Tan PL, Then X, Yung L, Lim KM (2011) On-chip measurements of cell compressibility via acoustic radiation. Lab Chip 11(23):4072. https://doi.org/10.1039/c1lc20687g
Ding X, Li P, Lin S, Stratton ZS, Nama N, Guo F, Slotcavage D, Mao X, Shi J, Costanzo F (2013) Surface acoustic wave microfluidics. Lab Chip 13(18):3626–3649. https://doi.org/10.1146/annurev-fluid-010313-141418
Tian Z, Yang S, Huang PH, Wang Z, Huang TJ (2019) Wave number–spiral acoustic tweezers for dynamic and reconfigurable manipulation of particles and cells. Sci Adv 5(5):eaau6062. https://doi.org/10.1126/sciadv.aau6062
Miansari M, Friend JR (2016) Acoustic Nanofluidics via Room-temperature lithium niobate bonding: a platform for actuation and manipulation of nanoconfined fluids and particles. Adv Func Mater 26(43):7861–7872. https://doi.org/10.1002/adfm.201602425
Ozcelik A, Rufo J, Guo F, Gu Y, Li P, Lata J, Huang TJ (2018) Acoustic tweezers for the life sciences. Nat Methods 15(12):1021–1028. https://doi.org/10.1038/s41592-018-0222-9
Moffitt JR, Chemla YR, Smith SB, Bustamante C (2008) Recent advances in optical tweezers. Annu Rev Biochem 77:205–228. https://doi.org/10.1146/annurev.biochem.77.043007.090225
Polimeno P, Magazzu A, Iati MA, Patti F, Saija R, Boschi CDE, Donato MG, Gucciardi PG, Jones PH, Volpe G (2018) Optical tweezers and their applications. J Quant Spectrosc Radiat Transfer 218:131–150. https://doi.org/10.1016/j.jqsrt.2018.07.013
Rasmussen M, Oddershede L, Siegumfeldt H (2008) Optical tweezers cause physiological damage to Escherichia coli and Listeria bacteria. Appl Environ Microbiol 74(8):2441–2446. https://doi.org/10.1128/AEM.02265-07
Bausch AR, Möller W, Sackmann E (1999) Measurement of local viscoelasticity and forces in living cells by magnetic tweezers. Biophys J 76(1):573–579. https://doi.org/10.1016/S0006-3495(99)77225-5
Strick T, Allemand J-F, Croquette V, Bensimon D (2000a) Twisting and stretching single DNA molecules. Prog Biophys Mol Biol 74(1–2):115–140. https://doi.org/10.1016/S0079-6107(00)00018-3
Charvin G, Strick T, Bensimon D, Croquette V (2005) Tracking topoisomerase activity at the single-molecule level. Annu Rev Biophys Biomol Struct 34:201–219. https://doi.org/10.1146/ANNUREV.BIOPHYS.34.040204.144433
Strick TR, Croquette V, Bensimon D (2000b) Single-molecule analysis of DNA uncoiling by a type II topoisomerase. Nature 404(6780):901–904. https://doi.org/10.1038/35009144
Neuman KC, Nagy A (2008) Single-molecule force spectroscopy: optical tweezers, magnetic tweezers and atomic force microscopy. Nat Methods 5(6):491–505. https://doi.org/10.1002/pros.20587
Wiklund M (2012) Acoustofluidics 12: Biocompatibility and cell viability in microfluidic acoustic resonators. Lab Chip 12(11):2018–2028. https://doi.org/10.1039/c2lc40201g
Lam KH, Li Y, Li Y, Lim HG, Zhou Q, Shung KK (2016) Multifunctional single beam acoustic tweezer for non-invasive cell/organism manipulation and tissue imaging. Sci Rep 6(1):1–7. https://doi.org/10.1038/srep37554
Baresch D, Thomas J-L, Marchiano R (2016) Observation of a single-beam gradient force acoustical trap for elastic particles: acoustical tweezers. Phys Rev Lett 116(2):024301. https://doi.org/10.1103/PhysRevLett.116.024301
Drinkwater BW (2016) Dynamic-field devices for the ultrasonic manipulation of microparticles. Lab Chip 16(13):2360–2375. https://doi.org/10.1039/c6lc00502k
Destgeer G, Sung HJ (2015) Recent advances in microfluidic actuation and micro-object manipulation via surface acoustic waves. Lab Chip 15(13):2722–2738. https://doi.org/10.1039/c5lc00265f
Guevara Vasquez F, Mauck C (2019) Periodic particle arrangements using standing acoustic waves. Proc R Soc A 475(2232):20190574. https://doi.org/10.1098/rspa.2019.0574
Primo GA, Mata A (2021) 3D patterning within hydrogels for the recreation of functional biological environments. Adv Func Mater 31(16):2009574. https://doi.org/10.1002/adfm.202009574
Li T, Zou Z, Mao G, Yang X, Liang Y, Li C, Qu S, Suo Z, Yang W (2019) Agile and resilient insect-scale robot. Soft Rob 6(1):133–141. https://doi.org/10.1089/soro.2018.0053
Wadsworth P, Nelson I, Porter DL, Raeymaekers B, Naleway SE (2020) Manufacturing bioinspired flexible materials using ultrasound directed self-assembly and 3D printing. Mater Des 185:108243. https://doi.org/10.1016/j.matdes.2019.108243
Llewellyn-Jones TM, Drinkwater BW, Trask RS (2016) 3D printed components with ultrasonically arranged microscale structure. Smart Mater Struct 25(2):02LT01. https://doi.org/10.1088/0964-1726/25/2/02LT01
Baudoin M, Thomas J-L (2020) Acoustic tweezers for particle and fluid micromanipulation. Annu Rev Fluid Mech 52:205–234. https://doi.org/10.1146/annurev-fluid-010719-060154
Wu J (1991) Acoustical tweezers. J Acoust Soc Am 89(5):2140–2143. https://doi.org/10.1121/1.400907
Friend J, Yeo LY (2011) Microscale acoustofluidics: Microfluidics driven via acoustics and ultrasonics. Rev Mod Phys 83(2):647. https://doi.org/10.1103/RevModPhys.83.647
Zhang P, Bachman H, Ozcelik A (2008) Huang TJ (2020) Acoustic microfluidics. Annu Rev Anal Chem 13(1):17–43. https://doi.org/10.1146/annurev-anchem-090919-102205
Peng D, Tong W, Collins DJ, Ibbotson M, Prawer S, Stamp ME (2021) Mechanisms and applications of neuromodulation using surface acoustic waves-a mini-review. Front Neurosci 15:37. https://doi.org/10.3389/fnins.2021.629056
Destgeer G, Lee KH, Jung JH, Alazzam A, Sung HJ (2013) Continuous separation of particles in a PDMS microfluidic channel via travelling surface acoustic waves (TSAW). Lab Chip 13(21):4210–4216. https://doi.org/10.1039/c3lc50451d
Ahmed H, Destgeer G, Park J, Afzal M, Sung HJ (2018) Sheathless focusing and separation of microparticles using tilted-angle traveling surface acoustic waves. Anal Chem 90(14):8546–8552. https://doi.org/10.1021/ACS.ANALCHEM.8B01593
Destgeer G, Ha BH, Jung JH, Sung HJ (2014) Submicron separation of microspheres via travelling surface acoustic waves. Lab Chip 14(24):4665–4672. https://doi.org/10.1039/c4lc00868e
Sadhal S (2012) Acoustofluidics 13: Analysis of acoustic streaming by perturbation methods. Lab Chip 12(13):2292–2300. https://doi.org/10.1039/c2lc40202e
Bernassau A, Glynne-Jones P, Gesellchen F, Riehle M, Hill M, Cumming D (2014) Controlling acoustic streaming in an ultrasonic heptagonal tweezers with application to cell manipulation. Ultrasonics 54(1):268–274. https://doi.org/10.1016/j.ultras.2013.04.019
Huang P-H, Nama N, Mao Z, Li P, Rufo J, Chen Y, Xie Y, Wei C-H, Wang L, Huang TJ (2014) A reliable and programmable acoustofluidic pump powered by oscillating sharp-edge structures. Lab Chip 14(22):4319–4323. https://doi.org/10.1039/c4lc00806e
Courtney CR, Ong C-K, Drinkwater B, Bernassau A, Wilcox P, Cumming D (2012) Manipulation of particles in two dimensions using phase controllable ultrasonic standing waves. Proc R Soc a: Math Phys Eng Sci 468(2138):337–360. https://doi.org/10.1098/rspa.2011.0269
Wu T-T, Chang I-H (2005) Actuating and detecting of microdroplet using slanted finger interdigital transducers. J Appl Phys 98(2):024903. https://doi.org/10.1063/1.1949710
Meng L, Cai F, Zhang Z, Niu L, Jin Q, Yan F, Wu J, Wang Z, Zheng H (2011) Transportation of single cell and microbubbles by phase-shift introduced to standing leaky surface acoustic waves. Biomicrofluidics 5(4):044104. https://doi.org/10.1063/1.3652872
Mohanty S, Khalil IS, Misra S (2020) Contactless acoustic micro/nano manipulation: a paradigm for next generation applications in life sciences. Proc R Soc A 476(2243):20200621. https://doi.org/10.1098/rspa.2020.0621
Blankenstein G, Wechsung R (2005) Micro-nano-technology for biomedical application. NanoBiotechnology 1(3):275–276. https://doi.org/10.1007/S12030-005-0038-4
Hunter GW, George T, Islam MS, Xu JC, Evans L, Dutta AK, Biaggi-Labiosa A, Ward BJ, Rowe S, Makel DB (2010) The development of micro/nano chemical sensor systems for aerospace applications. Proc SPIE - Int Soc Opt Eng 7679:76790S-76790S-12. https://doi.org/10.1117/12.850486
Wang Q, Xie PC, Yang WM, Ding YM (2012) A new preparation method of barrier material based on micro-nano lamination technology. Key Eng Mater 501:104–107. https://doi.org/10.4028/www.scientific.net/KEM.501.104
Gammaitoni L (2012) There’s plenty of energy at the bottom (micro and nano scale nonlinear noise harvesting). Contemp Phys 53(2):119–135. https://doi.org/10.1080/00107514.2011.647793
Xiao Z, Aftab TB, Li D (2019) Applications of micro–nano bubble technology in environmental pollution control. Micro Nano Lett IET 14(7):782–787. https://doi.org/10.1049/mnl.2018.5710
Shimoda T, Morii K, Seki S, Kiguchi H (2003) Inkjet printing of light-emitting polymer displays. MRS Bull 28(11):821–827. https://doi.org/10.1557/mrs2003.231
Mücklich F, Lasagni A, Daniel C (2006) Laser interference metallurgy – using interference as a tool for micro/nano structuring. Int J Mater Res 97(10):1337–1344. https://doi.org/10.3139/146.101375
Xc A, Kn B, Ms B, Sm B, Zgw A, Ky A (2008) Development of ultra-precision machining system with unique wire EDM tool fabrication system for micro/nano-machining. CIRP Ann 57(1):415–420. https://doi.org/10.1016/j.cirp.2008.03.137
Yabe A, Hirasawa S, Kasagi N, Kitamura T, Nakamach E, Takano Y, Ogawa H, Yokobori S, Ikegawa M (2004) Road map of micro-engineering and nano-engineering from manufacturing and mechanical engineering viewpoints. JSME Int J Ser B Fluids Therm Eng 47(3):534–540. https://doi.org/10.1299/JSMEB.47.534
Xu Q, Jia Y (2013) MEMS microgripper actuators and sensors: the state-of-the-art survey. Recent Pat Mech Eng 6(2):132–142. https://doi.org/10.2174/2212797611306020005
Wang SX, Chen GP, Zhou JH, Yan JP (2006) The development and test on wing type of a bionic flying micro-robot. J Exp Mech. https://doi.org/10.1360/jos172601
Goodman JW, Leonberger FJ, Kung SY, Athale RA (2005) Optical interconnections for VLSI systems. Proc IEEE 72(7):850–866. https://doi.org/10.1109/PROC.1984.12943
Schalbetter SM, Mueller FS, Scarborough J, Richetto J, Notter T (2021) Oral application of clozapine-N-oxide using the micropipette-guided drug administration (MDA) method in mouse DREADD systems. Lab Animal 50 (3). https://doi.org/10.1038/s41684-021-00723-0
Ramachandran TR, Baur C, Bugacov A, Madhukar A, Koel BE, Requicha A, Gazen C (1998) Direct and controlled manipulation of nanometer-sized particles using the non-contact atomic force microscope. Nanotechnology 9(3):237. https://doi.org/10.1088/0957-4484/9/3/015
Menciassi A, Scalari G, Eisinberg A, Anticoli C, Franca Ba Ndiera P, Carrozza MC, Dario P (2001) An instrumented probe for mechanical characterization of soft tissues. Biomed Microdevice 3(2):149–156. https://doi.org/10.1023/A:1011454427384
Ashkin A, Dziedzic JM, Bjorkholm JE, Chu S (1986) Observation of a single-beam gradient force optical trap for dielectric particles. Opt Lett 11:288. https://doi.org/10.1364/OL.11.000288
Lou Y, Ning X, Wu B, Pang Y (2021) Optical trapping using transverse electromagnetic (tem)-like mode in a coaxial nanowaveguide. Front Optoelectron 4:1–8. https://doi.org/10.1007/s12200-021-1134-3
Wu J (1999) Acoustical Tweezers. Jacoustsocam 89(5):2140–2143. https://doi.org/10.1121/1.400907
Collins DJ, Ma Z, Ai Y (2016) Highly localized acoustic streaming and size-selective submicrometer particle concentration using high frequency microscale focused acoustic fields. Anal Chem 5513. https://doi.org/10.1021/acs.analchem.6b01069
Tang S-Y, Qiao R, Lin Y, Li Y, Zhao Q, Yuan D, Yun G, Guo J, Dickey M, Huang T, Davis T, Kalantar-zadeh K, Li W (2018) Functional liquid metal nanoparticles produced by liquid-based nebulization. Adv Mater Technol 4:1800420. https://doi.org/10.1002/admt.201800420
Sehgal P, Kirby BJ (2017) Separation of 300-nm and 100-nm particles in Fabry-Perot acoustofluidic resonators. Anal Chem 89(22):12192–12200. https://doi.org/10.1021/acs.analchem.7b02858
Smorodin T, Beierlein U, Ebbecke J, Wixforth A (2010) Surface-acoustic-wave-enhanced alignment of thiolated carbon nanotubes on gold electrodes. Small 1(12):1188–1190. https://doi.org/10.1002/smll.200500208
Shi J, Ahmed D, Mao X, Lin S-CS, Lawit A, Huang TJ (2009a) Acoustic tweezers: patterning cells and microparticles using standing surface acoustic waves (SSAW). Lab Chip 9(20):2890–2895. https://doi.org/10.1039/b910595f
Greenhall J, Vasquez FG, Raeymaekers B (2016) Ultrasound directed self-assembly of user-specified patterns of nanoparticles dispersed in a fluid medium. Appl Phys Lett 108(10):3591. https://doi.org/10.1063/1.4943634
Grinenko A, Wilcox PD, Courtney C, Drinkwater BW (2012) Proof of principle study of ultrasonic particle manipulation by a circular array device. Proc R Soc a: Math Phys Eng Sci. https://doi.org/10.1098/rspa.2012.0232
Greenhall J, Vasquez FG, Raeymaekers B (2013) Continuous and unconstrained manipulation of micro-particles using phase-control of bulk acoustic waves. Appl Phys Lett 103(7):4667. https://doi.org/10.1063/1.4819031
Bernassau AL, Courtney C, Beeley J, Drinkwater BW, Cumming D Manipulation of microspheres and microbubbles in an octagonal sonotweezers. In: 2013 IEEE International Ultrasonics Symposium (IUS), 2013. pp 1903–1906.https://doi.org/10.1109/ULTSYM.2013.0485
Prisbrey M, Greenhall J, Vasquez FG, Raeymaekers B (2017) Ultrasound directed self-assembly of three-dimensional user-specified patterns of particles in a fluid medium. J Appl Phys 121(1):014302. https://doi.org/10.1063/1.4973190
Katzir S (2003) The discovery of the piezoelectric effect. Arch Hist Exact Sci 57(1):61–91. https://doi.org/10.1007/978-1-4020-4670-4_2
Hu, Junhui (2014) Ultrasonic micro/nano manipulations. https://doi.org/10.1142/8909:249-251https://doi.org/10.1142/9789814525329_0007
Dual J, Hahn P, Leibacher I, Mller D, Schwarz T (2014) Chapter 20: Experimental characterization of ultrasonic particle manipulation devices. https://doi.org/10.1039/9781849737067-00520
Han JL, Hu H, Huang QY, Lei YL (2021) Particle separation by standing surface acoustic waves inside a sessile droplet. Sens Actuators, A Phys 326(1):112731. https://doi.org/10.1016/j.sna.2021.112731
Zhu H, Zhang P, Zhong Z, Xia J, Rich J, Mai J, Su X, Tian Z, Bachman H, Rufo J (2021) Acoustohydrodynamic tweezers via spatial arrangement of streaming vortices. Sci Adv 7(2):eabc7885. https://doi.org/10.1126/sciadv.abc7885
Gor’Kov LP (1962) On the forces acting on a small particle in an acoustical field in an ideal fluid. Soviet Physics Doklady 6(1):773. https://doi.org/10.1097/00001888-199509000-00010
Frommelt T, Gogel D, Kostur M, Talkner P, Hanggi P, Wixforth A (2008) Flow patterns and transport in Rayleigh surface acoustic wave streaming: combined finite element method and raytracing numerics versus experiments. IEEE Trans Ultrason Ferroelectr Freq Control 55(10):2298–2305. https://doi.org/10.1109/TUFFC.928
Wiklund M, Green R, Ohlin M (2012) Acoustofluidics 14: applications of acoustic streaming in microfluidic devices. Lab Chip 12(14):2438–2451. https://doi.org/10.1039/c2lc40203c
Boluriaan S, Morris PJ (2003) Acoustic streaming: from rayleigh to today. Int J Aeroacoustics 2(3):255–292. https://doi.org/10.1260/147547203322986142
Nyborg WL (1958) Acoustic streaming near a boundary. Acoust Soc Am J 30(4):329. https://doi.org/10.1121/1.1909587
Westervelt PJ (1953) Errata: the theory of steady rotational flow generated by a sound field. J Acoust Soc Am 25 (4).https://doi.org/10.1121/1.1907190
Eckart C (1948) Vortices and streams caused by sound waves. Phys Rev 73 (68). https://doi.org/10.1103/PhysRev.73.68
Lighthill SJ (1978) Acoustic streaming. J Sound Vib 61(3):391–418. https://doi.org/10.1016/0022-460X(78)90388-7
Gao Y, Wu M, Lin Y, Xu J (2020) Acoustic microfluidic separation techniques and bioapplications: a review. Micromachines 11(10):921. https://doi.org/10.3390/mi11100921
Rayleigh L, Cl D, Rs F (1885) On waves propagated along the plane surface of an elastic solid. Proc Lond Math Soc 1:4–11. https://doi.org/10.1112/plms/s1-17.1.4
Agostini M, Cecchini M (2021) Ultra-high-frequency (UHF) surface-acoustic-wave (SAW) microfluidics and biosensors. Nanotechnology 32(31):312001. https://doi.org/10.1088/1361-6528/ABFABA
Lei Y, Hu H (2020) SAW-driven droplet jetting technology in microfluidic: a review. Biomicrofluidics 14(6):061505. https://doi.org/10.1063/5.0014768
Meng L, Cai F, Chen J, Niu L, Li Y, Wu J, Zheng H (2012) Precise and programmable manipulation of microbubbles by two-dimensional standing surface acoustic waves. Appl Phys Lett 100(17):173701. https://doi.org/10.1063/1.4704922
Nam J, Lim H, Kim D, Shin S (2011) Separation of platelets from whole blood using standing surface acoustic waves in a microchannel. Lab Chip 11(19):3361–3364. https://doi.org/10.1039/c1lc20346k
Franke T, Abate AR, Weitz DA, Wixforth A (2009) Surface acoustic wave (SAW) directed droplet flow in microfluidics for PDMS devices. Lab Chip 9(18):2625–2627. https://doi.org/10.1039/b906819h
Mccloskey KE, Chalmers JJ, Zborowski M (2003) Magnetic cell separation: characterization of magnetophoretic mobility. Anal Chem 75(24):6868–6874. https://doi.org/10.1021/AC034315J
Huang LR, Cox EC, Austin RH, Sturm JC (2004) Continuous particle separation through deterministic lateral displacement. Science 304(5673):987–990. https://doi.org/10.1126/SCIENCE.1094567
Takagi J, Yamada M, Yasuda M, Seki M (2005) Continuous particle separation in a microchannel having asymmetrically arranged multiple branches. Lab Chip 5(7):778–784. https://doi.org/10.1039/B501885D
Doh I, Cho Y-H (2005) A continuous cell separation chip using hydrodynamic dielectrophoresis (DEP) process. Sens Actuators, A 121(1):59–65. https://doi.org/10.1016/J.SNA.2005.01.030
Pethig R (2010) Dielectrophoresis: status of the theory, technology, and applications. Biomicrofluidics 4(2):022811. https://doi.org/10.1063/1.3456626
Shi J, Mao X, Ahmed D, Colletti A, Huang TJ (2008) Focusing microparticles in a microfluidic channel with standing surface acoustic waves (SSAW). Lab on A Chip 8(2):221–223. https://doi.org/10.1039/b716321e
Shi J, Huang H, Stratton Z, Huang Y, Huang TJ (2009) Continuous particle separation in a microfluidic channel via standing surface acoustic waves (SSAW). Lab on A Chip 9(23):3354–3359. https://doi.org/10.1039/b915113c
Wu M, Ouyang Y, Wang Z, Zhang R, Huang PH, Chen C, Li H, Li P, Quinn D, Dao M (2017) Isolation of exosomes from whole blood by integrating acoustics and microfluidics. Proc Natl Acad Sci USA 114(40):10584–10589. https://doi.org/10.1073/pnas.1709210114
Ding X, Shi J, Lin S, Yazdi S, Kiraly B, Huang TJ (2012) Tunable patterning of microparticles and cells using standing surface acoustic waves. Lab on A Chip 12(14):2491–2497. https://doi.org/10.1039/c2lc21021e
Wood C, Cunningham JE, O'Rorke R, Wlti C, Evans SD (2009) Formation and manipulation of two-dimensional arrays of micron-scale particles in microfluidic systems by surface acoustic waves. Appl Phys Lett 94(5):213. https://doi.org/10.1063/1.3076127
Ding X, Lin S, Kiraly B, Yue H, Li S, Chiang IK, Shi J, Benkovic SJ, Huang TJ (2012) On-chip manipulation of single microparticles, cells, and organisms using surface acoustic waves. Proc Natl Acad Sci U S A 109(28):11105–11109. https://doi.org/10.1073/pnas.1209288109
Shi J, Yazdi S, Lin S, Ding X, Huang TJ (2011) Three-dimensional continuous particle focusing in a microfluidic channel via standing surface acoustic waves (SSAW). Lab Chip 11(14):2319–2324. https://doi.org/10.1039/c1lc20042a
Guo F, Mao Z, Chen Y, Xie Z, Lata JP, Li P, Ren L, Liu J, Yang J, Dao M (2016) Three-dimensional manipulation of single cells using surface acoustic waves. Proc Natl Acad Sci 113(6):1522–1527. https://doi.org/10.1073/PNAS.1524813113
Redwood M (1967) Rayleigh and Lamb waves. Ultrasonics 5 (4):260–260. 978–1–4899–5683–5
Nguyen TD, Tran VT, Fu YQ, Du H (2018) Patterning and manipulating microparticles into a three-dimensional matrix using standing surface acoustic waves. Appl Phys Lett 112(21):213507. https://doi.org/10.1063/1.5024888
Tan DN, Fu YQ, Tran VT, Pudasaini S, Du H (2020) Acoustofluidic closed-loop control of microparticles and cells using standing surface acoustic waves. Sens Actuators, B Chem 318:128143. https://doi.org/10.1016/j.snb.2020.128143
Hawkes JJ, Coakley WT, Groschl M, Benes E, Armstrong S, Tasker PJ, Nowotny H (2002) Single half-wavelength ultrasonic particle filter: predictions of the transfer matrix multilayer resonator model and experimental filtration results. J Acoust Soc Am 111(3):1259. https://doi.org/10.1121/1.1448341
Nilsson A, Petersson F, Jönsson H, Laurell T (2004) Acoustic control of suspended particles in micro fluidic chips. Lab Chip 4(2):131–135. https://doi.org/10.1039/B313493H
Ivo L, Peter R, Jürg D (2015) Microfluidic droplet handling by bulk acoustic wave (BAW) acoustophoresis. Lab Chip 15(13):2896–2905. https://doi.org/10.1039/c5lc00083a
Shu X, Liu H, Zhu Y, Cai B, Jin Y, Wei Y, Zhou F, Liu W, Guo S (2018) An improved bulk acoustic waves chip based on a PDMS bonding layer for high-efficient particle enrichment. Microfluid Nanofluid 22(3):32. https://doi.org/10.1007/s10404-018-2052-6
Devendran C, Gralinski I, Neil D A (2014) Separation of particles using acoustic streaming and radiation forces in an open microfluidic channel. Microfluid Nanofluid 17(5):879–890. https://doi.org/10.1007/s10404-014-1380-4
Collino RR, Ray TR, Fleming RC, Cornell JD, Compton BG, Begley MR (2016) Deposition of ordered two-phase materials using microfluidic print nozzles with acoustic focusing. Extreme Mech Lett 8:96–106. https://doi.org/10.1016/j.eml.2016.04.003
Fornell A, Cushing K, Nilsson J, Tenje M (2018) Binary particle separation in droplet microfluidics using acoustophoresis. Appl Phys Lett 112(6):063701. https://doi.org/10.1063/1.5020356
Gesellchen F, Bernassau AL, Déjardin T, Cumming DRS, Riehle MO (2014) Cell patterning with a heptagon acoustic tweezer – application in neurite guidance. Lab A Chip 14(13):2266–2275. https://doi.org/10.1039/c4lc00436a
Bernassau AL, Macpherson P, Beeley J, Drinkwater BW, Gumming DRS (2013) Patterning of microspheres and microbubbles in an acoustic tweezers. Biomed Microdevice 15(2):289–297. https://doi.org/10.1007/s10544-012-9729-5
Andrade M, Skotis GD, Ritchie S, Cumming D, Riehle MO, Bernassau AL (2016) Contactless acoustic manipulation and sorting of particles by dynamic acoustic fields. IEEE Trans Ultrason Ferroelectr Freq Control 63(10):1953–1600. https://doi.org/10.1109/TUFFC.2016.2608759
Cohen S, Sazan H, Kenigsberg A, Schori H, Shefi O (2020) Large-scale acoustic-driven neuronal patterning and directed outgrowth. Sci Rep 10(1):4932. https://doi.org/10.1038/s41598-020-60748-2
Haake A, Dual J (2005) Contactless micromanipulation of small particles by an ultrasound field excited by a vibrating body. J Acoust Soc Am 117(5):2752–2760. https://doi.org/10.1121/1.1874592
Haake A, Neil DA, Radziwill G, Dual J (2010) Positioning, displacement, and localization of cells using ultrasonic forces. Biotechnol Bioeng 92(1):8–14. https://doi.org/10.1002/bit.20540
Oberti S, Neild A, Dual J (2007) Manipulation of micrometer sized particles within a micromachined fluidic device to form two-dimensional patterns using ultrasound. J Acoust Soc Am 121(2):778. https://doi.org/10.1121/1.2404920
Raeymaekers B, Pantea C, Sinha DN (2011) Manipulation of diamond nanoparticles using bulk acoustic waves. J Appl Phys 109(1):14317. https://doi.org/10.1063/1.3530670
Tian L, Martin N, Bassindale PG, Patil AJ, Li M, Barnes A, Drinkwater BW, Mann S (2016) Spontaneous assembly of chemically encoded two-dimensional coacervate droplet arrays by acoustic wave patterning. Nat Commun 7(1):1–10. https://doi.org/10.1038/ncomms13068
Hou Z, Zhou Z, Liu P, Pei Y (2020) Deformable oscillation of particles patterning by parametric bulk acoustic waves. Extreme Mech Lett 37:100716. https://doi.org/10.1016/j.eml.2020.100716
Doruk, Erdem, Yunus, Salman, Sohrabi, Ran, He, Wentao, Shi, Yaling (2017) Acoustic patterning for 3D embedded electrically conductive wire in stereolithography. J Micromech Microeng: Struct Devices Syst 27(4):45016. https://doi.org/10.1088/1361-6439/aa62b7
Ouyang L, Armstrong J, Salmeron-Anchez M, Stevens MM (2020) Assembling living building blocks to engineer complex tissues. Adv Funct Mater 30 (26). https://doi.org/10.1002/adfm.201909009
Olofsson K, Hammarström B, Wiklund M (2018) Ultrasonic based tissue modelling and engineering. Micromachines 9(11):594. https://doi.org/10.3390/mi9110594
Reversible Design of Dynamic Assemblies at Small Scales (2020). Advanced Intelligent Systems 3 (4):2000193. https://doi.org/10.1002/AISY.202000193
Guex AG, Di Marzio N, Eglin D, Alini M, Serra T (2021) The waves that make the pattern: a review on acoustic manipulation in biomedical research. Mater Today Bio 10:100110. https://doi.org/10.1016/J.MTBIO.2021.100110
Bouyer C, Chen P, Güven S, Demirtaş TT, Nieland TJ, Padilla F, Demirci U (2016) A bio‐acoustic levitational (BAL) assembly method for engineering of multilayered, 3D brain‐like constructs, using human embryonic stem cell derived neuro‐progenitors. Adv Mater 28(1):161–167. https://doi.org/10.1002/ADMA.201503916
Vries AD, Krenn BE, Driel RV, Kanger JS (2005) Micro magnetic tweezers for nanomanipulation inside live cells. Biophys J 88 (3):2137–2144. https://doi.org/10.1529/biophysj.104.052035
Funding
We gratefully acknowledge the financial support from the National Natural Science Foundation of China (51876052), the Natural Science Foundation of Zhejiang Province (LZ22E060001), the Fundamental Research Funds for the Provincial Universities of Zhejiang (GK199900299012-021), and the National Natural Science Foundation of China (51976118).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Liu, W., Gao, H., Liu, K. et al. A review on particle assembly in standing wave acoustic field. J Nanopart Res 24, 81 (2022). https://doi.org/10.1007/s11051-022-05461-z
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11051-022-05461-z