
Abstract
A two-dimensional multi-phase lag model in the context of generalized thermoelasticity is established for an isotropic half-space medium. A vector-matrix differential equation is obtained from the governing equations using normal mode analysis. The eigenvalue approach is applied to obtain the solutions. The temperature-dependent displacements, stresses, strains are calculated numerically and represented graphically to show the accuracy of the solution under mechanical and thermal loads.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
The modified coupled stress-strain theory has become popular in Nano-systems to study strain, displacement, vibration, buckling, bending, etc., in the engineering structures like beams, plates and shells. The modified theory of coupled stress has been introduced by Yang et al. (2002). The theory of generalized thermoelasticity was introduced to remove the finiteness of the heat equation in the conventional classical thermoelasticity (CTE) theory. The generalized thermoelasticity theory has become acceptable to the different engineering fields as well as to the researcher as it is capable of avoiding the finiteness of heat propagation.
In the history of generalized thermoelasticity, Lord and Shulman (1967) introduced a one-relaxation time parameter in the conventional heat conduction equation to modify classical Fourier law (CFL), which is also known as the first generalization theory of thermoelasticity. In the second generalization theory, Green and Lindsay (1972) proposed temperature rate dependent theory (TRDTE) by introducing two relaxation time parameters in the coupled theory of thermoelasticity. In the third generalization, Hetnarski and Ignaczak (1996) proposed the non-linear model introducing the concept of coupled thermoelasticity with low temperature. Green and Naghdi (1991, 1992, 1993) proposed three thermoelastic models known as Green-Naghdi type-I, type-II and type-III, respectively. Type-I is considered similar to the classical theory of thermoelasticity. Type-II model provides the idea of non-dissipation of energy associated with zero production rate of entropy. Type-III Green-Naghdi model is associated with type-I and type-II together with the study of energy dissipation and damped thermoelastic waves. Later on, Tzou (1995, 1999) and Chandrasekhariah (1998) discussed the Dual Phase Lag (DPL) model to inspect the lagging behavior in the thermoelastic medium. Again, Roy Choudhuri (2007) discussed the concept of the Three Phase Lag Model [TPL], introducing three-time parameters in the conventional heat conduction equation. Ghosh et al. (2019), Ghosh and Lahiri (2020), Quintanilla and Racke (2008) found the solutions of the heat equation in the theory of TPL heat conduction in their recent research work. Also, Zenkour (2018) proposed a refined two-temperature multi-phase-lag (RPL) model for a generalized thermoelastic medium consisting of both the heat flux vector and the temperature gradient. In their work, Sardar et al. (2022) studied a three-dimensional coupled thermoelasticity for an anisotropic half-space using multi-phase lag gradients. Zenkour (2018) also studied the thermomechanical effects of microbeams using refined multiphase-lag theory. In association, Alharbi et al. (2022) studied a multi-phase-lag model to investigate the influence of variable thermal conductivity with initial stress on a fibre-reinforced thermoelastic material in the magnetic field.
In our recent study, we investigated the effect of multi-phase lag variables on a two-dimensional thermoelastic isotropic medium.
2 Formulation of the problem
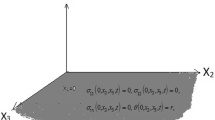
In the orthogonal co-ordinate system XOY, we consider a two dimensional isotropic half-space defined in the region \(W=\{0\leq x < \infty, -\infty<y<\infty\}\) (as in Fig. 1) subject to traction free boundary \(x=0\). Also, y-axis is considered vertically downwards, and the xy-plane is along the free surface of the half-space.

Schematic diagram of the problem
3 Basic equations
Equation of motion:
For a homogeneous isotropic half-space, as in Ghosh et al. (2017), Zenkour (2018) and Eringen (1984), respectively, we consider the following governing equations.
The stress-displacement relation:
Heat conduction equation (In context of multi-phase Lag):
where \(\gamma =(3\lambda +2\mu )\alpha _{t}\), \(\lambda +2\mu =\rho {c_{1}}^{2} \) and \(e =\frac{\partial u}{\partial x}+ \frac{\partial v}{\partial y} \)
4 Nomenclature
Column 1 | Column 2 |
|---|---|
u, v: Displacement Components | e: Dilatation |
T: Absolute thermodynamic temperature. | t: Time variable |
\(C_{E} \): Specific heat at constant strain | λ, μ: Lame’s Constant |
\(T_{0} \): Reference temperature | τ: Relaxation Time |
\(\tau _{q}\), \(\tau _{\theta } \): Dual-phase-lag, \(\tau _{0}\): thermal relaxation time | ρ : Density of the material |
\(K_{11}\), \(K_{22} \) : Thermal conductivity | Ω: angular velocity in the domain W. |
\(\alpha _{t} \) : Coefficient of linear thermal expansion | P: Initial stress |
5 Method of solution
5.1 Formulation of a vector-matrix differential equation
For the solution of equations (1)–(6), the physical quantities can be decomposed into the following form
Introducing non-dimensional variables, we obtain from equations (1), (2) and (6) (omitting primes for convenience),
After introducing non-dimensional variables, the stress-displacement relations (equations (3)–(5)) reduce to (omitting primes for convenience),
5.2 Normal mode analysis
To decompose the physical variables in terms of normal modes, as in Ghosh et al. (2018), we consider the following normal mode analysis
where \(\omega \) is the angular frequency, a is the wave number along the x-axis, and \(i = \sqrt{-1}\).
Introducing normal mode analysis to equation 8, 9 and 10, we obtain (omitting asterisks for convenience):
Introducing normal mode analysis to equations (11)–(13), we obtain the stress components as (omitting asterisks for convenience)
where \(M_{ij}\) (\(i=1,2,3\) and \(j= 1,2,..,6\)) and \(C_{ij}\) (\(i=1,2,3,4,5\) and \(j= 1,2\)) are mentioned in the Appendix.
6 Solution of the vector-matrix differential equation
The equations (15)–(17) reduce to the compact form of vector-matrix differential equation as follows
where \(\vec{v}=\left ( \begin{array}{c@{\quad}c@{\quad}c@{\quad}c@{\quad}c@{\quad}c} u & v & T & \frac{du}{dx} & \frac{dv}{dx} & \frac{dT}{dx} \end{array} \right ) \), and A is given in the appendix.
For the solution of the vector-matrix differential equation (21), we apply the method of eigenvalue approach as in Ghosh and Lahiri (2018). The characteristic equation of matrix A is given by
The roots of the characteristic equation (21) are \(\lambda =\lambda _{i} \) (\(i=1(1)6\)), and the corresponding eigenvector \(\mathbf{X}\) is given below
where
and \(f_{ij} \) (\(i, j=1,2,3\)) are given in the Appendix.
The solution of the vector-matrix equation is given by
Thus the stress components are as follows
where \(R_{ij}\) \(i,j=1,2,3 \) are given in the appendix, and \(A_{j}\), \(j=1,2,3 \) are to be obtained using the boundary conditions..
7 Boundary conditions
Due to the regularity condition of the solution at infinity, three terms containing exponentials of growing in nature in the space variables \(x \) have been discarded, and the remaining arbitrary constants \(A_{i} \), (\(i=1,2,\ldots4\)) are to be determined from the following boundary conditions.
7.1 Mechanical boundary
The boundary of the half-space \(x=0\) has no traction elsewhere, i.e.,
7.2 The thermal boundary condition
Applying the above boundary conditions in equations (25) and (26), we get the following simultaneous equations:
The arbitrary constants can be obtained by solving the above simultaneous equations where, \(A_{i} =\frac{D_{i} }{ D } \), \(i=1,2,3 \), \(D,D_{i}\): \(i=1,2,3\), \(S_{ij}\): \(i,j=1,2,3 \) and \(z_{i}\): \(i=1,2 \), which are given in the Appendix.
8 Numerical analysis
Numerical analysis and computation have been done using the mechanical and thermal conditions mentioned in equations (27)–(29) to study the characteristic behaviors of the physical constants with respect to space variables in triclinic half-space. The numerical values (in SI units) of constants are taken as in Eringen (1984), Zenkour (2018):
9 Geometrical representation and analysis
The expressions for displacements, stress, and temperature are very complex, and we prefer to develop an efficient computer program for numerical computations. We now depict some graphs to illustrate the problem.
10 Concluding remarks
Figure 2, 3 and 4 depict the characteristic behavior of the different stress components \(\tau _{xx}\), \(\tau _{xy}\), and \(\tau _{yy}\), respectively, along the \(x\)-axis with respect to the space variable (\(x \)) in different times (t=0.1, t=0.4, t=0.7). Also, Fig. 5, 6 and 7 represent the space variation of non-dimensional displacement components (u and v) and temperature (\(T \)) along the x-direction for different times mentioned in the legend.

Distribution of \(\tau _{xx} \) vs. x for different t at y =0.7

Distribution of \(\tau _{xy}\) vs. x for different t at y =0.7

Distribution of \(\tau _{yy}\) vs. x for different t at y =0.7

Distribution of temperature (T) vs. x for different t at y =0.7

Distribution of displacement component (u) vs. x for different t at y =0.7

Distribution of displacement component (v) vs. x for different t at y =0.7
Figure 8, 9, 10 and 11 are pointing out the three-dimensional variations of different stress components \(\tau _{xx}\), \(\tau _{xy}\), \(\tau _{yy}\) and temperature (\(T \)), respectively, with respect to the space variable(\(x \) and \(y \)) in a particular time span (t=0.3).

Normal stress component, \(\tau _{xx} \) as a function of x and y at time t=0.3

Shearing tress, \(\tau _{xy} \) as a function of x and y at time t=0.3

Normal stress component, \(\tau _{yy} \) as a function of x and y at time t=0.3

Representation of temperature ( \(T \) ) as a function of x and y at time t=0.3
Also, Fig. 12, 13 are about the three-dimensional depiction of the two elementary displacement components (\(u \) and \(v \)) w.r.t \(x \) and \(y \) for the fixed time (t=0.3).

Displacement field (u) as a function of x and y at time t=0.3

Displacement field (v) as a function of x and y at time t=0.3
11 Significance and applications
The Dual Phase Lag (DPL) model by Tzou, Chandrasekhariah and Three Phase Lag (TPL) by Roy Choudhury have been extended here using the refined technics known as the multi-phase lag model. In our work, the multi-phase lag concept is studied and verified successfully using the prominent mechanical and thermal boundary conditions associated with governing equations. The two- and three-dimensional variations of the different stress components, strain components and temperature curves have been represented graphically.
The tabular data in Fig. 14 represents the compact variations of the numerical value of different stress components, temperature and displacement components in the context of different thermoelastic models compared to the multi-phase lag model. From the data table, it is possible to differentiate the effect of different phase lag models and multi-phase lags on different physical variables.

Data table
References
Alharbi, A.M., Said, S.M., Abd-Elaziz, E.M., Othman, M.I.A.: Influence of initial stress and variable thermal conductivity on a fiber-reinforced magneto-thermoelastic solid with micro-temperatures by multi-phase-lags model. Int. J. Struct. Stab. Dyn. 22(01), 2250007 (2022)
Chandrasekhariah, D.S.: Hyperbolic thermoelasticity: a review of recent literature. Appl. Mech. Rev. 21(12), 705–729 (1998)
Eringen, A.C.: Plane waves in non local micropolar elasticity. Int. J. Eng. Sci. 22(8–10), 1113–1121 (1984)
Ghosh, D., Lahiri, A.: Study on the generalized thermoelastic problem for an anisotropic medium. J. Heat Transf. 140(9), 094501 (2018)
Ghosh, D., Lahiri, A.: Three Dimensional Fibre-Reinforce Anisotropic Half Space with Lagging Behavior in the Presence of Heat Source and Gravity. International Journal of Applied and Computational Mathematics 6(40) (2020). Published online
Ghosh, D., Lahiri, A., Abbas, I.A.: Two-dimensional generalized thermo-elastic problem for anisotropic half-space. Math. Models Eng. 3(1), 27–40 (2017)
Ghosh, D., Lahiri, A., Kumar, R., Roy, S.: 3D thermoelastic interactions in an anisotropic lastic slab due to prescribed surface temperature. J. Solid Mech. 10(3), 502–521 (2018)
Ghosh, D., Das, A.K., Lahiri, A.: Modeling of a three dimensional thermoelastic half space with three phase lags using memory dependent derivative. Int. J. Appl. Comput. Math. 5, 154–174 (2019)
Green, A.E., Lindsay, K.A.: Thermoelasticity. J. Elast. 2(1), 1–7 (1972)
Green, A.E., Naghdi, P.M.: A re-examination of the basic postulates of thermomechanics. J. Math. Phys. Sci. 432, 1885 (1991)
Green, A.E., Naghdi, P.M.: An undamped heat wave in an elastic solid. J. Therm. Stresses 15, 253–264 (1992)
Green, A.E., Naghdi, P.M.: Thermoelasticity without energy dissipation. Elasticity 31, 189–208 (1993)
Hetnarski, R.B., Ignaczak, J.: Soliton-like waves in a low temperature nonlinear thermoelastic solid. Int. J. Eng. Service 34(15), 1767–1787 (1996)
Lord, H.W., Shulman, Y.: A generalized dynamical theory of thermoelasticity. J. Mech. Phys. Solids 15(5), 299–309 (1967)
Quintanilla, R., Racke, R.: A note on stability in three-phase-lag heat conduction. Int. J. Heat Mass Transform. 51, 24–29 (2008)
Roy Choudhuri, S.K.: On a thermoelastic three-phase-lag model. J. Therm. Stresses 30(3), 231–238 (2007)
Sardar, S.S., Ghosh, D., Das, B., Lahiri, A.: On a multi-phase lag model of three-dimensional coupled thermoelasticity in an anisotropic half-space. In: Waves in Random and Complex Media (2022). Vol: Published online: 06 Jul 2022
Tzou, D.Y.: Unified field approach for heat conduction from micro- to macro-scales. SME J. Heat Transf. 117, 8–16 (1995)
Tzou, D.Y.: Thermal shock phenomena under high rate response in solids. Heat Transf. Eng. 4, 111–185 (1999)
Yang, F., Chong, A.C.M., Lam, D.C.C., Tong, P.: Couple stress based strain gradient theory for elasticity. Int. J. Solids Struct. 39, 2731–2743 (2002)
Zenkour, Ashraf M.: Refined microtemperatures multi-phase-lags theory for plane wave propagation in thermoelastic medium. Results Phys. 11, 929–937 (2018)
Zenkour, Ashraf M.: Refined two-temperature multi-phase-lags theory for thermomechanical response of microbeams using the modified couple stress analysis. Acta Mech. 229, 3671–3692 (2018)
Author information
Authors and Affiliations
Contributions
The authors contributed equally to this work.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix 1
Appendix 1
Rights and permissions
About this article

Cite this article
Lahiri, A., Sardar, S.S. & Ghosh, D. Modeling of a homogeneous isotropic half space in the context of multi-phase lag coupled thermoelasticity. Mech Time-Depend Mater 28, 485–499 (2024). https://doi.org/10.1007/s11043-022-09584-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11043-022-09584-7