
Abstract
This study focuses on the question of the stability analysis of complex interconnected nonlinear systems using the property of Lyapunov and Finsler. The main idea is to minimize the effect of interconnections between the subsystems, for that, we use the Lyapunov function and the H∞ control, then applying Finsler’s lemma to release the conditions of stability, the independent matrices allow to obtain less conservative results. The proposed control approach is formulated in a minimization problem and derived in terms of linear matrix inequalities (LMIs) whose resolution yields the decentralized control gain matrices. All the developed results are tested on two representative examples and compared with some recent previous ones.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
In the literature the problem of stability analysis of interconnected complex nonlinear systems are using in automatism systems and power electronics, there are many dynamic systems in this domain [4, 14, 18], their complex systems are regrouped in the big area, also their automatic configuration is more complex [8, 12, 16], for the control and the modelization for this complex system, we composite this system in interconnected subsystems, these decompositions facilitate the resolution of the issue of stability [2, 11, 15, 17]. The synthesis of law control and stabilization can be ensuring the global safety of the system and responding in a more secure of the system [7, 10], Moreover, in the phase of the modeling, the classical approach can be very hard and complicated to use to these complex systems in the context of the reliability and practical conception, this method of decentralized control is alternative to assert the stabilization of the complex and big systems [6].
In this work, we studied the stabilization of interconnected subsystems using a decentralized control law by state feedback. These approaches make it possible to stabilize all the interconnected subsystems by taking into account their interconnections. Then, in order to improve this approach, we propose, through a H∞ criterion, to study the robustness to the effects of the interconnections between subsystems. Pursuing this objective, we propose a new decentralized H∞ controller based on Finsler’s lemma [1, 3] such that all subsystems are asymptotically stable, the new conditions ensuring all the closed-loop stability, are supplied in terms of Linear Matrix Inequalities (LMIs) and the feedback gain matrix of each local controller is obtained by solving the LMIs [5].
The global of this work is organize as follows: in the second section, a state of the art of the system description has been provided. The main results has been introduced in Section 3, after that in Section 4, we show the experimental results. Finally, we give a conclusion of this work in the last section.
2 System description
We consider the following interconnected systems, where the ith subsystem is given by [16]:
with \( {x}_i(t)\in {\Re}^{n_i} \) and \( {x}_j(t)\in {\Re}^{n_j} \) are the states of the ith and the jth subsystem, \( {u}_i(t)\in {\Re}^{m_i} \)is the control input. The system matrices Ai, Aij and Bi, are known real constant of appropriate dimensions.
\( \sum \limits_{j=1,j\ne i}^N{A}_{ij}{x}_j(t): \) Represent the influences of N-1 subsystems on the ith subsystem.
The closed-loop subsystem is given by:
where ui(t) = ki xi(t),.
The following figure (Fig.1) represents the diagram of an interconnected system:

Diagram of interconnected complex nonlinear systems
The following Fig. 1 shows the diagram of interconnected complex nonlinear systems, the main idea is to fragment the overall system into several subsystems that are easier to handle.
We then place ourselves in a “decentralized” approach compared to traditional approaches which consist in studying a system as a whole.
The main objective of the decomposition of systems and the decentralization of calculations is: To reduce the calculation time.
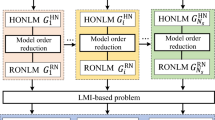
The proposed control structure considers the system as a set of interconnected subsystems Fig. 2, each subsystem is controlled by a control unit, i.e. the decentralized controllers partition the information and develop a local control law at level of each subsystem and allows stabilize it.

Diagram of decentralized controller
We end this section with the following lemmas, which will be used for further development.
Lemma 1
(Schur complement) [9] Given three matrices Q, R = RT et S = ST,the following statement are equivalent
-
(i)
$$ \left[\begin{array}{cc}R& Q\\ {}{Q}^T& S\end{array}\right]>0 $$(3)
-
(ii)
$$ S>0\kern0.24em \mathrm{and}\kern0.36em R-{QS}^{-1}\kern0.1em {Q}^T>0, $$(4)
Lemma 2
[13] For any n × n matrix Q, any constant ε > 0 and any symmetric positive matrix P,
For all x, y ∈ ℜn.
Lemma 3
(Finsler Lemma) [3]: Consider ξ ∈ ℜn, Q = QT ∈ ℜn × nand β ∈ ℜm × n such that rank(β) < n, and β⊥ a basis for the null-space of β (i.e.β⊥β = 0). The following propositions are equivalents:
-
(i)
ξTQξ < 0, for all ξ ≠ 0, βξ = 0;
-
(ii)
\( {\beta}_{\perp}^TQ{\beta}_{\perp }<0; \)
-
(iii)
∃χ ∈ ℜn × m : Q + χβ + βTχT < 0
This lemma is used to introduce new matrix variables, which are exploited for:
-
Increase the degree of freedom of the system.
-
separate the Lyapunov matrices from the system parameters.
This allows to release the conditions of stability.
3 Main results
In this section, the main goal is to design a decentralized controller ensuring the stability of closed loop interconnected systems without and with delay.
3.1 New decentralized H∞ control for interconnected systems using Finsler lemma
In this subsection, a new decentralized H∞ control conditions using Finsler Lemma for the interconnected closed-loop system (2) is developed. For our work, we are interested in minimizing the influences of interconnections between subsystems, for this purpose and in order to improve the robustness of the proposed control law with respect to the interconnections between the subsystems, we propose a criterion H∞ allowing to minimize the influence of the N-1 subsystems on the ith subsystem. This criterion is given by the inequality (6):
For i = 1, …, N,
where
γi > 0 are the H∞ performances level.
Note that, the vector φi(t) reflects the influence of a jth subsystem on ith and, in this case, the performance rate H∞ appropriate to minimize.
The main result is summarized in the following theorem:
Theorem 1
The set S of the N interconnected subsystems Si described by (2) is globally asymptotically stabilized in closed loop via the network of N decentralized control laws with respect to the criterion H∞ described by (6), if it exists for all the combinations i, j = 1, …, N, j ≠ i,positive matrices \( {P}_i={P}_i^T>0,{Y}_i,{F}_i \) and positive scalars γi, ai, bi verifying the LMI conditions given by:
Minimize γi such as:

The new local gains matrices is \( {k}_i={y}_i{\left({F}_i^T\right)}^{-1},\kern0.36em i=1,\dots, N \)
Where

We notice that the lyapunov matrices Pi are totally separated from the parameters of the system Ai, Bi. This allows to release the stability conditions obtained.
Proof
The H∞ synthesis by state feedback consists in looking for a decentralized control law by state feedback ki such as ui = ki*xi; and ensures both:
-
The stability of the interconnected system in closed loop.
-
The verification of the H∞ criterion given by inequality (6).
The closed-loop interconnected system (2) is stable according to the H∞ criterion if condition (9) is verified
The above inequality can be reformulated as
With:
we obtained
where
Expression (2) can be written as:
Where Aci = Ai + Biki
Considering
with
and using condition (ii) of lemma 3, we obtained the equality between \( {\beta}_{i\perp}^T{Q}_i{\beta}_{i\perp } \)and the LMIs in (12) [16].
Now, Applying Finsler’s Lemma 3 in condition (6), with (11), (13) and (14) writes
Thus, (16) is equivalent to (8). This completes the proof of the theorem 1.
3.2 Decentralized state feedback H∞ control for interconnected systems with time-delay
We consider the state representation of the interconnected closed loop system with time-delay can be expressed as [7]:
The τi, ηij are unknown time-delay factors satisfying the following conditions:
where the bounds ρi, ρij, μi and μji are known constants in order to guarantee smooth growth of the state trajectories.
In this section, we are interested in designing a decentralized state feedback H∞ by ensuring the stabilization of interconnected systems with time delay (18).
Our goal is to minimize the effects of interconnections between subsystems by guaranteeing the stabilization of the subsystems (17).
We introduce a criterion H∞ allowing to minimize the influence of the j subsystems (j = 1, …, N, and j ≠ i) on the ith subsystem. This criterion is given by:
where
\( \sum \limits_{j=1,j\ne i}^N{A}_{ij}{x}_j\left(t-{\eta}_{ij}(t)\right) \) Represent the influences of N-1 subsystems on the ith subsystem.
γi > 0 are the H∞ performances level which should be minimized.
The interconnected variable-delay system (17) is stable according to the H∞ criterion if the inequality (20) is verified:
The approach ensuring simultaneously stabilizing the system (17), via the decentralized controller μi(t) = kixi(t) and reduce the effect of interconnections between subsystems is summarized in the following theorem.
Theorem 2
Given ρi > 0, μi > 0 and μij > 0, the decentralized H∞ control problem for the system (17) is solvable if there exist symmetric positive definite matrices Pi, Qi, Zij, Wi, i, j = 1, …, N, i ≠ j and the positive scalars γi for any time delays τi(t), ηij(t) satisfying (18), satisfying the following conditions LMI:
Minimizing γi such as

where
Moreover, the decentralized state feedback gain matrix is given by:
Proof
The closed loop system (17) is stable under the criterion H∞ if:
The inequality (23) may be increased by (see Appendix):
with
Let
we obtain
with
That is to say, for all i, j = 1, …, N and j≠1
Inequality (29) can be rewritten as:
where
Applying the Schur complement in lemma 1, we obtain
(32) is satisfied if:
Where \( {\psi}_{11}={Z}_{ji}+\frac{1}{N-1}\left({P}_i{A}_{ci}+{A}_{ci}^T{P}_i+Q\right) \)
Multiplying ψ left and right respectively by.
\( \operatorname{diag}\left[{P}_i^{-T},{P}_i^{-T},I,I,{W}_i^{-T},I\right] \) and \( \operatorname{diag}\left[{P}_i^{-1},{P}_i^{-1},I,I,{W}_i^{-1},I\right] \),
and let \( {X}_i={P}_i^{-1},{y}_i={k}_i{X}_i,{S}_i={W}_i^{-1},{R}_{ji}={X}_i{Z}_{ji}{X}_i,{R}_i={X}_i{Q}_i{X}_i, \),
Finally, we obtain the LMI conditions (21) of theorem 2. This completes the proof.
4 Experimental result
In this section, two numerical examples are supplied to show the advantage of the proposed approaches.
Example 1
We give the decentralized H∞ control issue of interconnected system (2) with
Applying theorem 1 to the system (2) and minimizingγi , it is found that the feasible solution is attaint at:
In order to show the efficiency of our approach, we will solve the LMI stability conditions proposed in theorem 1 and by minimizingγi .
The results obtained of our approach as well as those in the literature are summarized in Tables 1 and 2.
Table 1 shows the comparison of the minimal of H∞ performance for the three subsystems.
According to the results obtained, we notice that γmin obtained by application of theorem 1 are smaller than [16].
We note that our approach is more efficient than that of [16].
Table 2 represent the gain matrices obtained for the three subsystems.
We notice that the controller parameters obtained by applying theorem 1 are smaller than those in [16].
The three local controllers are capable of stabilizing the three subsystems.
In this numerical result, the initial conditions are given as:
The evolution of the control system and these dynamics in a closed-loop for every each subsystem are shown in Figs. 3, 4 and 5.

a Dynamics of the 1st closed-loop subsystem according to [16] and [Theorem 1]. b Evolution of the control law of the 1st subsystem by the proposed method

a Dynamics of the 2th closed-loop subsystem according to [16] and [Theorem 1]. b Evolution of the control law of the 2th subsystem by the proposed method

a Dynamics of the 3th closed-loop subsystem according to [16] and [Theorem 1]. b Evolution of the control law of the 3th subsystem by the proposed method
We performed a simulation test for the 3 subsystems:
The Fig. 3a represent the comparison of the dynamics of the 1st subsystem by our method and that of [16]; we notice that the latter requires more time before stability is restored. On the other hand, the proposed control ensures a better convergence with a very reduced response time with fewer oscillations.
Similarly for the 2th subsystem, we notice that the proposed control ensures a better convergence with a very reduced response time.
Also for the 3th subsystem, we can always notice that the proposed control ensures a better convergence with a very reduced response time of about 1 s.
We note that all the decentralized controllers stabilize the global interconnected system after a time of the order of 1 s. While each subsystem has its own convergence time, each of the subsystems has its own convergence time.
Example 2
Consider the interconnected closed loop system with time-delay [7] given by:
The interconnections of the subsystems influence the stabilization of the system as an overall.
Applying theorem 2, for:
We obtain \( {P}_1=\left[\begin{array}{l}1.4664\kern0.75em \hbox{-} 0.1928\\ {}\hbox{-} 0.1928\kern1em 0.1505\end{array}\right];{Q}_1=\left[\begin{array}{l}28.4358\kern0.75em \hbox{-} 4.0533\\ {}\hbox{-} 4.0533\kern1em 0.7780\end{array}\right]; \).
Since Pi, Qi, Wi > 0, i = 1, 2, 3
Then, the conditions provided by Theorem 2 are satisfied.
The results obtained of our approach as well as those in the literature are summarized in Tables 1 and 2.
Table 3 shows the comparison of the minimum performance bound H∞ obtained for the three subsystems.
According to the results obtained, we notice that γminobtained by application of theorem 2 are smaller than those of [7]. Thus, our approach is more efficient than that of [7].
The Table 4 shows the gain matrices obtained for the three subsystems. The three local controllers are capable to stabilize the three subsystems.
5 Conclusion
In this study, we proposed a new decentralized H∞ control for interconnected complex nonlinear systems such that the closed-loop feedback subsystems are asymptotically stable. We used a Lyapunov function and H∞ criterion to reduce and minimize the effect of interconnections between the subsystems, in order to release the conditions of stability, we applied Finsler’s lemma. The sufficient conditions ensuring stability in closed loop were formulated in the terms of LMI. Finally, the obtained result are given to prove the efficiency of the proposed method, and the graphics result shows that the system is well stabilized.
References
Abbaszadeh M, Marquez HJ (2012) A generalized framework for robust nonlinear H∞ filtering of Lipschitz descriptor systems with parametric and nonlinear uncertainties. Automatica 48(5):894–900
Bernussou J, Titli A (1982) Interconnected dynamical systems: stability, decomposition and decentralization, North-Holland
Cheng Q, Cui B (2019) Improved results on robust energy-to-peak filtering for continuous-time uncertain linear systems. Circ Syst Signal Process 38:2335–2350. https://doi.org/10.1007/s00034-018-0965-7
Hwang JD, Hsiao FH (2003) Stability analysis of neural-network interconnected systems. IEEE Trans Neural Netw 14(1):201–208. https://doi.org/10.1109/TNN.2002.806643
Li J et al (2010) H∞ performance for a class of uncertain linear time-delay systems based on LMI. Int Conf Educ Technol Comput 5:344–348. https://doi.org/10.1109/ICETC.2010.5530057
Lin WW et al (2007) A novel stabilization criterion for large-scale T–S fuzzy systems. IEEE Trans Syst Man Cybern Part B Cybern 37(4):1074–1079. https://doi.org/10.1109/TSMCB.2007.896016
Mahmoud MS, Almutairi NB (2009) Decentralized stabilization of interconnected systems with time-varying delays. Eur J Control 6:624–633. https://doi.org/10.3166/ejc.15.624-633
Mahmoud MS, Al-Sunni FM (2010) Interconnected continuous-time switched systems: robust stability and stabilization. Nonlinear Anal Hybrid Syst 4(3):531–542. https://doi.org/10.1016/j.nahs.2010.01.001
Souza M, Wirth FR, Shorten RN (2017) A note on recursive Schur complements, Hurwitz stability of Metzler matrices and related results. IEEE Trans Autom Control 62:4167–4172. https://doi.org/10.1109/TAC.2017.2682032
Srdjan Stanković S, Siljak D (2009) Robust stabilization of nonlinear interconnected systems by decentralized dynamic output feedback. Syst Control Lett 58(4):271–275. https://doi.org/10.1016/j.sysconle.2008.11.003
Thanh Nguyen T, Phat Vu N (2012) Decentralized H∞ control for large-scale interconnected nonlinear time-delay systems via LMI approach. J Process Control 22(7):1325–1339
Wang WJ, Lin W (2005) Decentralized PDC for large scale TS fuzzy systems. IEEE Trans Fuzzy Syst 13(6):779–786. https://doi.org/10.1109/TFUZZ.2005.859309
Zhang Y, Pheng AH (2002) Stability of fuzzy control systems with bounded uncertain delays. IEEE Trans Fuzzy Syst 10:92–97. https://doi.org/10.1109/91.983283
Zhu Y, Pagilla PR (2007) Decentralized output feedback control of a class of large-scale interconnected systems. IMA J Math Control Inf 24:57–69. https://doi.org/10.1093/imamci/dnl007
Zouhri A, Boumhidi I (2015) Decentralized control of interconnected systems with time-delays. 12th ACS/IEEE International Conference on Computer Systems and Applications AICCSA 2015 November 17-20, Marrakech, Morocco. https://doi.org/10.1109/AICCSA.2015.7507224
Zouhri A, Boumhidi I (2016) Decentralized robust H∞ control of large scale systems with polytopic-type uncertainty. Int Rev Autom Control (IREACO) 9(2):103–109. https://doi.org/10.15866/ireaco.v9i2.8728
Zouhri A, Boumhidi I (2017) Decentralized H∞ control of interconnected systems with time-varying delays. CIT J Comput Inf Technol 25(3):167–180
Zouhri A, Benyakhlef M, Kririm S, BOUMHIDI I (2016) Robust stability and H∞ analysis for interconnected uncertain systems. Int J Math Stat 17(1):55–66
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
1.1 Decentralized State Feedback H∞ Control
In this Appendix, we verify the inequality (19) used in section 3, with:
Apply the lemma of the square matrix, we have:
Then
Since
Inequality (A.4) can be rewritten as follows:
Finally, the inequality (24) is verified.
Rights and permissions
About this article

Cite this article
Zouhri, A., Boumhidi, I. Stability analysis of interconnected complex nonlinear systems using the Lyapunov and Finsler property. Multimed Tools Appl 80, 19971–19988 (2021). https://doi.org/10.1007/s11042-020-10449-9
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11042-020-10449-9