
We show a correlation between the loading characteristic of crack resistance (critical stress intensity factor) and the mechanical characteristics during dynamic indentation. We propose a procedure for monitoring a material in the stage preceding its fracture. We have obtained experimental results for isotropic pyrolytic graphite that support the feasibility of the procedure and the possibility of using it for nondestructive testing of graphitized carbon materials.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
The reliability of construction materials depends on the crack resistance (fracture toughness), characterizing the resistance of the material to crack propagation. Despite various methods for evaluating the crack resistance characteristics of materials [1, 2], some of which are standardized in many countries [3–6], the question of their effective application remains problematic. The major disadvantages of standard procedures, such as in [3], are the rather high cost and the labor-intensiveness associated with the need to fabricate special samples with a crack and to conduct complicated tests accompanied by precision measurements of the geometric dimensions of the crack. Also in evaluating the crack resistance characteristics of a material for a specific product, we need to take into account the treatment the material undergoes during processing (deformation, thermal, etc.), the design features (size, shape), and the operating conditions (temperature, etc.). These facts suggest the need to develop new procedures providing an objective evaluation of the crack resistance of materials from nondestructive testing results.
Effective tools for solving problems of evaluation of the loading characteristic of the crack resistance (the critical stress intensity factor K 1C ) of materials include indentation tests. In tests of materials, such as ceramics, for crack resistance, in most cases static indentation by a Vickers pyramid is used. The factor K 1C is determined using semi-empirical dependences, where the indentation load, the dimensions of the indentation and the crack, the hardness, and the modulus of elasticity for the material, etc., act as the arguments [7]. However, the lack of a common methodology for determining the crack resistance characteristics (including application of a sufficiently large set of semi-empirical dependences for calculating their values), the stationary equipment, and bringing the material to the state of local fracture do not allow us to monitor the material directly in the product. As a result, we need to develop new testing procedures. Therefore, it is important to study and develop an indentation procedure which is based on local contact loading of the material in the stage preceding its fracture, and which provides a rapid evaluation of the crack resistance characteristics of materials using portable instruments. The dynamic indentation method based on continuous recording of the process of penetration by the indentor is the most suitable method [8–11].
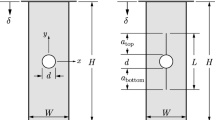
Theory. Isotropic pyrolytic graphite (IPG) is a graphitized carbon material and is characterized by high brittleness (the impact toughness of IPG is about 80 times lower than for steel alloy, and only 2 times greater than for oxide ceramic) and small-scale yielding, when the dimensions of the plastic zone arising at the crack tip are sufficiently small compared with its length. Therefore, in studying the crack resistance characteristics of IPG, it is suggested to introduce the assumption that its fracture process is concentrated in some small vicinity of the crack tip, while the stress–strain state at the crack tip has similar characteristics to that which develops as the indentor penetrates into the material [12]. From this assumption, it follows that the values of the crack resistance characteristics determined from the results of the standard testing method will be close to the results of local deformation by the dynamic indentation method. We also note that during indentation the radial stress in the large contact region is compressive while outside this region it is tensile [13], reaching its maximum value at the boundary of the elastoplastic transition (Fig. 1).

Model for penetration of a cone into an elastoplastic medium.
For elastoplastic materials (polymethylmethacrylate and polystyrene), the normal stress at the center of the indentation reaches the critical value of the fracture stress σƒ, and so the unit work of deformation is comparable during indentation and deformation of the crack tip [9]. In this case, the work W ƒ done per unit contact surface area in crack initiation and growth during indentation by a cone can be calculated using the formula
where γ is the angle at the vertex of the cone; R ƒ is the critical indentation radius; P is the contact force; and αƒ is the critical penetration depth,
We use the familiar Griffith’s formula to calculate the fracture toughness:
where E is the modulus of elasticity for the material, determining the value of αƒ.
The value of E is found based on the damage parameter D, where the relative change in the modulus of elasticity is considered as a rather reliable criterion for damage in the material [14]:
where E ƒ is the modulus of elasticity for the damaged material.
The value of αƒ is determined very accurately by linear extrapolation of the dependence relating the modulus of elasticity to the penetration depth of the indentor and the pre-impact indentation velocity [9]. Considering that indentation is done by a cone, we use the hardness calculated as the average unit pressure:
where R is the radius of the indentor.
From (5), taking into account (2), we find
and, substituting (6) into (1), we obtain
Using (3), we express
where we calculate the modulus of elasticity during indentation using the formulas relating E to the contact stiffness S in the initial unloading stage during indentation [9]:
where ν is Poisson’s ratio; αmax is the maximum penetration depth of the indentor; and P max is the maximum load during indentation.
In [8], it is shown that for brittle, optically transparent materials (glass), when using the dynamic indentation method the stress intensity factor can be determined as
where B is a constant depending on the properties of the material; m is the weight of the indentor; V p is the pre-impact velocity; and k = 4E * R 1/2/3, E * is the reduced modulus.
Equipment and Materials. In conducting the experiments, we used a device for measuring the properties of pyrolytic graphite that was developed at the Institute of Applied Physics (Belarus) and which allows us to obtain sets of instantaneous values of the indentor velocity V(t), the penetration depth α(t), and the contact force P(t) during its impact penetration, and based on these values we can plot the load vs. penetration depth. Impact penetration was done by spherical indentors with the following characteristics: for indentor No. 1, weight m = 4.8 g, contact surface diameter d = 0.75 mm; for indentor No. 2, m = 4.8 g, d = 1.7 mm.
As the study material, we used samples of isotropic pyrolytic graphite: a ring of square cross section with outer diameter 188 mm, inner diameter 162 mm, thickness 18 mm.
The Experiment and Results Obtained. During the experiments, in the pre-impact velocity range 0.58–0.97 m/sec we determined the following characteristics: impact time; time for the active and passive stages of impact; approach and recoil velocities; maximum contact force; contact force at maximum penetration; elastic and viscous deformation energies.
Figure 2 shows the graphs of the time dependences of the physical quantities obtained during impact penetration of indentor No. 1. The contact spot was 100 μm at a depth of 15–20 μm.

Graphs showing the time dependences of the penetration depth α, the contact force P, and the indentor velocity V during the test impact.
During indentation of the IPG samples with pre-impact velocity 1 m/sec, we obtained the contact force vs. penetration depth curves for the indentor (see Fig. 3). Further calculation of K 1C for the IPG samples was done using formulas (4), (5), (7). The results of tests by the dynamic indentation method were compared with results obtained from data on penetration of a Vickers pyramid (Table 1).

Contact force P vs. penetration depth α during the test impact.
Analysis of the data obtained suggests rather high reproducibility of the experimental results in [15, 16]. For further study of the functional relationship between the considered parameters, we need to conduct experiments involving a large number of graphitic carbon materials, also including isotropic pyrolytic graphite. We note that we do not need additional equipment for this, and the dynamic indentation method can be used in engineering and laboratory practice for comparative analysis of the crack resistance characteristics of graphitic carbon materials.
Conclusion. Experimental data obtained during dynamic contact indentation of isotropic pyrolytic graphite supported the feasibility of determining its mechanical characteristics and calculating the loading characteristic of its crack resistance using the formulas presented in this paper. The procedure considered can be used to study crack resistance characteristics of graphitic carbon materials.
References
J. A. Collins, Failure of Materials in Mechanical Design: Analysis, Prediction, Prevention [Russian translation], Mir, Moscow (1984).
V. V. Moskvichev et al., Crack Resistance of Construction Materials in Engineering Systems, Nauka, Novosibirsk (2002).
GOST 25.506-85, Strength Calculations and Tests. Mechanical Testing Methods for Materials. Determination of Crack Resistance (fracture toughness) Characteristics under Static Loading.
ASTM E 1820-06, Standard Test Method for Measurement of Fracture Toughness.
ISO 17281:2002, Plastics – Determination of Fracture Toughness (G1C and K1C) at Moderately High Loading Rates (1 m/s).
ISO 11673:2005, Unplasticized Poly(vinyl chloride) (PVC-U) Pressure Pipes – Determination of the Fracture Toughness Properties.
A. V. Bashta, “Studies of a ceramic during indentation by a Vickers diamond pyramid,” Probl. Prochn., No. 9, 49–54 (1990).
A. P. Kren’, “Determination of the critical stress intensity factor of glass under elastic contact conditions by the dynamic indentation method,” Probl. Prochn., No. 6, 51–60 (2009).
A. P. Kren’, “Nondestructive testing for crack resistance of elastoplastic materials using local contact loading parameters,” Vesti NAN Belarusi, No. 3, 117–121 (2011).
D. A. Chernous et al., “Procedure for determining viscoelastic characteristics of rubber blends by dynamic indentation,” Zavod. Lab. Diagn. Mater., 75, No. 12, 50–53 (2009).
V. A. Rudnitskii and A. P. Kren’, Testing Elastomer Materials by Indentation Methods, Belorusskaya Nauka, Minsk (2007).
ISO 13586:2000, Plastics – Determination of Fracture Toughness (G1C and K1C) – Linear Elastic Fracture Mechanics (LEFM) Approach.
A. A. Khlybov, “Study of accumulation of isolated microdamage in specimens of 08Kh18N10T steel during low-cycle fatigue,” Kontrol. Diagnost., No. 4, 55–61 (2011).
Yu. S. Bakhracheva, “Evaluation of fracture toughness in steels from contact deformation results,” Tekhn.-Tekhnol. Innov. Vestnik Volgograd. Gos. Univ., Ser. 10, No. 7, 53–56 (2012).
M. Ya. Marusina and A. V. Flegontov, “Applications of dimensional analysis and group theory in mechanics,” Nauch. Priborostr., 15, No. 1, 94–99 (2005).
M. Ya. Marusina, Invariant Analysis and Synthesis in Models with Symmetries, Izd. SPbGU ITMO, St. Petersburg (2004).
Author information
Authors and Affiliations
Corresponding author
Additional information
Translated from Metrologiya, No. 11, pp. 25–32, November, 2014.
Rights and permissions
About this article

Cite this article
Marusin, M.P., Fedorov, A.V., Kren’, A.P. et al. Determination of the Crack Resistance Characteristics of Graphitized Carbon Materials by the Dynamic Indentation Method. Meas Tech 57, 1411–1415 (2015). https://doi.org/10.1007/s11018-015-0642-1
Received:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11018-015-0642-1